Изобретение относится к навигационной технике и может быть использовано при проектировании инерциальных и интегрированных навигационных систем.
Одними из основных требований к навигационным системам является их автономность, непрерывность, точность функционирования при достаточной надежности, обеспечивающей безопасность управления транспортным средством.
Известна система [1], которая содержит радиоприемник, соединенный через усилитель с антенной, а выходами подключенный к вычислителю местоположения навигационных спутников, подключенному другими входами к блоку начальной установки альманаха данных об орбитах спутников, а выходы этого вычислителя соединены с входами блока выделения радиовидимых спутников. Выходы этого блока подключены к входам блока выделения рабочего созвездия спутников, соединенного выходами с входами блока вычислителя местоположения потребителя. Кроме того, в систему входят измеритель проекций абсолютной угловой скорости, состоящий их трех ортогонально установленных лазерных гироскопов, измеритель проекций кажущегося ускорения, включающий три акселерометра, установленных по соответствующим осям лазерных гироскопов. Указанные измерители через блоки коррекции подключены к вычислителю навигационных параметров, выходы которого связаны через третий блок коррекции с выходами системы и с выходами дисплея, при этом часть выходов системы подключена к входам блока выделения радиовидимых спутников, а часть выходов вычислителя навигационных параметров подключена к первой группе входов анализатора достоверности информации, другая группа входов которого соединена с выходами блока вычисления местоположения потребителя. Выходы анализатора через блок ключей связаны с входами навигационного фильтра, первая группа выходов которого соединена соответственно с входами двух блоков коррекции, а вторая группа выходов подключена к входам третьего блока коррекции.
Известная система довольно точно решает задачу навигации в условиях надежного радиоконтакта с навигационными спутниками, но при этом не обеспечивает формирование выходных сигналов, полученных на основе только инерциальной информации. Расширенный состав выходных сигналов требуется, в частности, для обеспечения автономности и надежности функционирования системы в составе пилотажно-навигационного комплекса самолетов.
Наиболее близкой к предлагаемой системе по технической сущности является система [2], содержащая многоканальный радиоприемник, вход которого через усилитель связан с антенной, а его выходы подключены к первой группе входов вычислителя местоположения спутников, блок начальной установки альманаха данных о спутниках, подключенный выходами к второй группе входов вычислителя местоположения спутников, таймер, подключенный выходом к синхронизирующему входу вычислителя местоположения спутников, а его выходы соединены с входами блока выделения радиовидимых спутников, подключенного выходами к входам блока выбора рабочего созвездия спутников, выходы которого соединены с входами блока вычисления местоположения пользователя, а также измеритель проекций абсолютной угловой скорости и измеритель проекций вектора кажущегося ускорения, подключенные соответственно через корректор угловой скорости и корректор кажущегося ускорения к вычислителю навигационных параметров, в которую дополнительно введены блок комплексирования информации и вычислитель начальных данных, входы с первого по третий которого соединены с одноименными входами корректора угловой скорости и выходами измерителя проекций абсолютной угловой скорости, входы с четвертого по шестой соединены соответственно с выходами измерителя проекций вектора кажущегося ускорения и с входами с первого по третий корректора кажущегося ускорения, при этом вторая группа входов соединена с входами с четвертого по шестой корректора угловой скорости и подключена к выходам с тринадцатого по пятнадцатый блока комплексирования информации, а третьей группой из трех входов соединен с входами с семнадцатого по девятнадцатый блока комплексирования информации и подключен к выходам с первого по третий блока вычисления местоположения пользователя, остальные выходы которого с четвертого по шестой связаны с входами с двадцатого по двадцать второй блока комплексирования информации непосредственно, при этом выходы вычислителя начальных данных с четвертого по девятый связаны с второй группой входов из шести вычислителя навигационных параметров и с входами с десятого по пятнадцатый блока комплексирования информации, а выходы с первого по третий непосредственно связаны с входами с седьмого по девятый блока комплексирования информации, первая группа входов с первого по шестой которого соединена с одноименными входами вычислителя навигационных параметров, девять выходов которого соединены с одноименными выходами системы непосредственно, и подключена соответственно к трем выходам корректора угловой скорости и трем выходам корректора кажущегося ускорения, а шестнадцатый вход связан с выходом таймера, при этом выходы блока комплексирования информации с первого по третий соединены с второй группой входов блока выбора рабочего созвездия спутников, выходы с шестнадцатого по восемнадцатый подключены соответственно к входам с четвертого по шестой корректора кажущегося ускорения, а выходы с четвертого по двенадцатый соединены с выходами системы с десятого по восемнадцатый непосредственно.
Эта система решает задачу автономного определения местоположения пользователя в трехмерном пространстве с достаточной точностью, если имеет надежный радиоконтакт и достоверную информацию как минимум от четырех спутников выбранного рабочего созвездия, и обеспечивает формирование расширенного состава выходных сигналов, требуемых для пилотирования самолетом. Однако даже в случае частичного отказа измерителя угловой скорости, при котором информация хотя бы об одной проекции угловой скорости отсутствует либо становится недостоверной, вся система теряет свою функциональность и становится неработоспособной.
Задачей настоящего изобретения является повышение надежности системы в условиях возможного частичного отказа измерителя угловой скорости, при котором информация об одной проекции вектора скорости отсутствует либо не достоверна.
Для решения поставленной задачи предложена отказоустойчивая интегрированная навигационная система с избыточным количеством измерителей угловой скорости, содержащая блок спутниковой навигационной информации, вход которого через усилитель связан с антенной, вычислитель начальных данных, входы с первого по третий которого подключены к одноименным выходам измерителя проекций абсолютной угловой скорости, входы с четвертого по шестой подключены соответственно к выходам измерителя проекций вектора кажущегося ускорения и соединены с входами с четвертого по шестой вычислителя навигационных параметров, а второй группой из трех входов с седьмого по девятый соединен с входами с четырнадцатого по шестнадцатый блока комплексирования информации и подключен к выходам с второго по четвертый блока спутниковой навигационной информации, остальные выходы которого с пятого по седьмой связаны с входами с семнадцатого по девятнадцатый блока комплексирования информации непосредственно, при этом шесть выходов вычислителя начальных данных соединены с входами с седьмого по двенадцатый вычислителя навигационных параметров и с входами с седьмого по двенадцатый блока комплексирования информации, первая группа входов с первого по шестой которого соединена с одноименными входами вычислителя навигационных параметров, девять выходов которого соединены с одноименными выходами системы непосредственно, а тринадцатый вход блока комплексирования информации связан с первым выходом блока спутниковой навигационной информации непосредственно, при этом выходы блока комплексирования информации с первого по третий соединены с группой входов блока спутниковой навигационной информации, а выходы с четвертого по двенадцатый соединены с выходами системы с десятого по восемнадцатый непосредственно, в которую дополнительно введен вспомогательный измеритель проекций абсолютной угловой скорости, три выхода которого соединены с входами с четвертого по шестой блока обнаружения, локализации и компенсации отказа, первая тройка входов которого подключена к одноименным выходам измерителя проекций абсолютной угловой скорости и соединена с одноименными входами вычислителя начальных данных, а выходы с первого по третий соединены с одноименными входами вычислителя навигационных параметров и блока комплексирования информации.
На фиг. 1 приведена блок-схема предлагаемой системы. Алгоритм, реализованный в блоке обнаружения, локализации и компенсации отказа, описан далее по тексту. Остальные блоки предлагаемой системы реализуют алгоритмы прототипа.
В соответствии с фиг. 1 система содержит блок 1 спутниковой навигационной информации (БСНИ), связанный с антенной 2, выход которого соединен с группой входов вычислителя 3 начальных данных (ВНД) и блока 4 комплексирования информации (БКИ), а группа входов блока 1 спутниковой навигационной информации связана с частью выходов блока 4 комплексирования информации. Кроме того, вычислитель 3 начальных данных частью входов подключен к выходам измерителя 5 проекций абсолютной угловой скорости (ИПАУС) и измерителя 6 проекций вектора кажущегося ускорения (ИПВКУ), а его выходы соединены с входами вычислителя 7 навигационных параметров (ВНП) и блока 4 комплексирования информации. Остальные входы блока 4 комплексирования информации соединены с одноименными входами вычислителя 7 навигационных параметров и подключены непосредственно к выходам измерителя 6 проекций кажущегося ускорения и к выходам блока 8 обнаружения, локализации и компенсации отказа (БОЛКО), две группы входов которого соединены соответственно с выходами измерителя 5 проекций абсолютной угловой скорости и с выходами вспомогательного измерителя 9 проекций абсолютной угловой скорости (ВИПАУС). Выходы системы непосредственно связаны с частью выходов блока 4 комплексирования информации и выходами вычислителя 7 навигационных параметров.
Предлагаемая отказоустойчивая интегрированная навигационная система с избыточным количеством измерителей угловой скорости (ОИНСИКИУС) работает следующим образом.
В соответствии с прототипом исходной информацией для формирования выходных параметров ОИНСИКИУС являются сигналы с трех связанных с корпусом самолета и установленных ортогонально друг относительно друга гироскопов, входящих в состав измерителя 5 проекций абсолютной угловой скорости, и сигналы с трех аналогично расположенных акселерометров, входящих в измеритель 6 проекций вектора кажущегося ускорения. Для выполнения функции отказоустойчивости в систему дополнительно к прототипу включен вспомогательный измеритель 9 проекций абсолютной угловой скорости, содержащий три гироскопа более низкого класса точности, специальным образом расположенных относительно основных гироскопов, входящих в состав ИПАУС.
Сигналы с гироскопов, пропорциональные проекциям вектора абсолютной угловой скорости 


Алгоритм обнаружения, локализации и компенсации отказа состоит в следующем.
Пусть измерительные оси ИПАУС и ВИПАУС связаны между собой матрицей преобразования 
Расчетное значение матрицы A (кватерниона Q) определено на этапе проектирования из условий наилучшей идентифицируемости отказавшего гироскопа. Точное значение матрицы A определяется в процессе заводской юстировки.
Поскольку гироскопические измерения мгновенной угловой скорости содержат высокий уровень шума, процедура обнаружения, локализации и компенсации отказа строится на интегральных критериях, позволяющих судить о параметрическом отказе гироскопа по накопленной погрешности определения ориентации.
В блоке БОЛКО по текущим измерениям ИПАУС
где 



Таблица 1
















Для сравнения кватернионов между собой кватернионы Д0, Д1, Д2, Д3 необходимо преобразовать по формуле 

При отсутствии отказов в ИПАУС и ВИПАУС кватернионы 


Признаком параметрического отказа является превышение какого-либо параметра 

При обнаружении отказа его локализация осуществляется в соответствии с таблицей 2. Кватернионы считаются равными, если соответствующий параметр 
Таблица 2








Локализация аппаратного отказа осуществляется по признаку отсутствия информации от гироскопа.
Процедура компенсации отказа проводится при обнаружении отказа с учетом его локализации в соответствии с таблицей 3.
Таблица 3
недостоверной
информацией 










В ВНД поступают также сигналы, пропорциональные широте 


В ВНД осуществляется подготовка начальных данных для БКИ и ВНП, в результате чего формируются сигналы 

В ВНП по сигналам, поступающим из БОЛКО и ИПВКУ, с учетом начальных данных, поступивших из ВНД, осуществляется оперативное вычисление навигационных параметров: углов ориентации самолета относительно географического меридиана 





Принимаемые антенной 2 сигналы от навигационных спутников поступают в блок 1 спутниковой навигационной информации, куда также из БКИ поступают сигналы 



Комплексирование инерциальной и спутниковой информации осуществляется в блоке 4 комплексирования информации, на вход которого поступают сигналы, пропорциональные достоверным значениям проекций угловой скорости из блока 8 обнаружения, локализации и компенсации отказа, кажущегося ускорения из измерителя 6 проекций вектора кажущегося ускорения, а также сигналы из блока 1 спутниковой навигационной информации о координатах и скорости самолета и сигнал времени для синхронизации инерциальной и спутниковой информации. После включения системы в блок 4 комплексирования информации одноразово поступают также сигналы из ВНД о местоположении самолета 


Таким образом, благодаря реализации в ОИНСИКИУС алгоритма обнаружения, локализации и компенсации отказа в информации измерителя проекций абсолютной угловой скорости на основе сравнения с измерениями вспомогательного измерителя проекций угловой скорости, специальным образом расположенного относительно осей ИПАУС, достигаются следующие преимущества. Снижается вероятность неконтролируемого отказа, поскольку избыточные измерения позволяют усовершенствовать средства встроенного контроля; при аппаратном или параметрическом отказе одного гироскопа и наличии спутниковой информации функциональность системы не сужается, а при кратковременном перерыве спутниковых измерений - быстро восстанавливается с появлением спутниковых данных; при аппаратном или параметрическом отказе одного гироскопа и длительном отсутствии спутниковой информации система длительное время и с требуемой точностью может выполнять функции датчика вертикали, тем самым обеспечивая отказоустойчивость системы в целом.
Источники информации
1. Патент РФ №2087867, G01C 23/00, 1993.
2. Заявка RU №2004111865, G01C 23/00, G01S 5/14, 2004 - прототип.
3. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - М.: Наука, 1973. - 320 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА С КОМБИНИРОВАННЫМ ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ ДАННЫХ | 2007 |
|
RU2334199C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНОГО АППАРАТА | 2012 |
|
RU2493578C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
Изобретение относится к навигационной технике и может быть использовано при проектировании инерциальных и интегрированных навигационных систем. Технический результат - повышение надежности. Для этого вычислитель начальных данных частью входов подключен к выходам измерителя проекций абсолютной угловой скорости и измерителя проекций вектора кажущегося ускорения, а его выходы соединены с входами вычислителя навигационных параметров и блока комплексирования информации. Остальные входы блока комплексирования информации соединены с одноименными входами вычислителя навигационных параметров и подключены непосредственно к выходам измерителя проекций кажущегося ускорения и к выходам блока обнаружения, локализации и компенсации отказа, две группы входов которого соединены соответственно с выходами измерителя проекций абсолютной угловой скорости и с выходами вспомогательного измерителя проекций абсолютной угловой скорости. Выходы системы непосредственно связаны с выходами блока комплексирования информации и вычислителя навигационных параметров. 1 ил., 3 табл.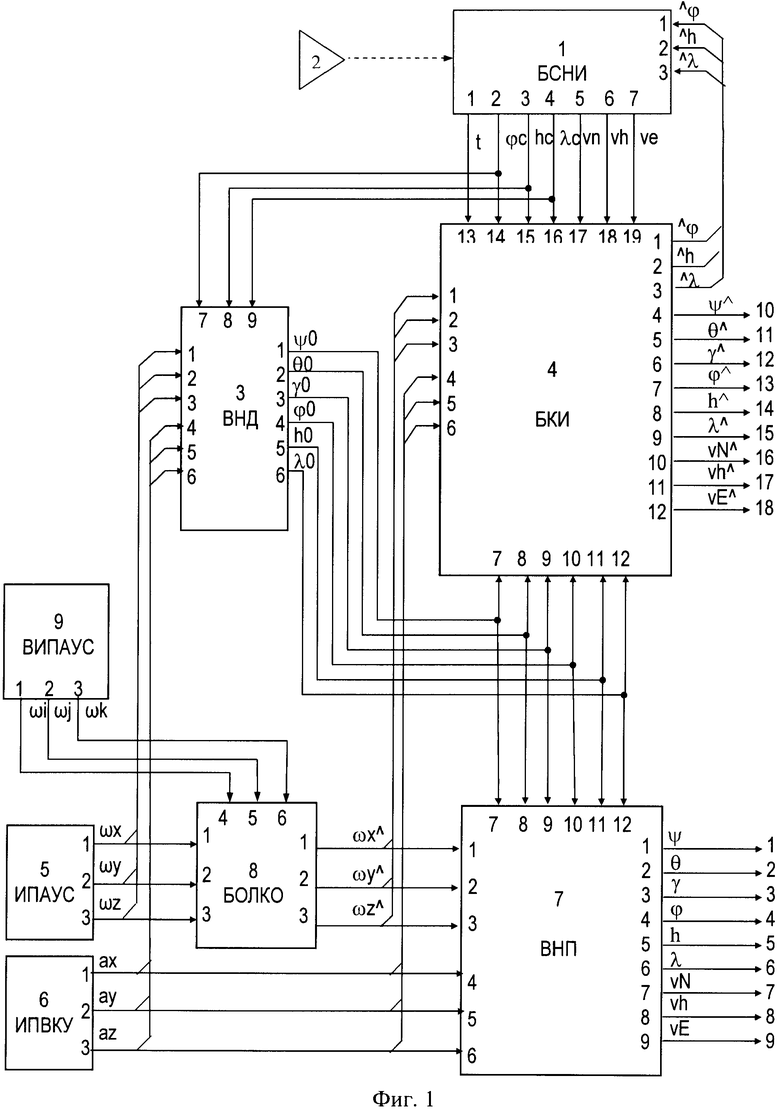
Отказоустойчивая интегрированная навигационная система с избыточным количеством измерителей угловой скорости, содержащая блок спутниковой навигационной информации, вход которого через усилитель связан с антенной, вычислитель начальных данных, входы с первого по третий которого подключены к одноименным выходам измерителя проекций абсолютной угловой скорости, входы с четвертого по шестой подключены соответственно к выходам измерителя проекций вектора кажущегося ускорения и соединены с входами с четвёртого по шестой вычислителя навигационных параметров, а второй группой из трех входов с седьмого по девятый соединен с входами с четырнадцатого по шестнадцатый блока комплексирования информации и подключен к выходам с второго по четвёртый блока спутниковой навигационной информации, остальные выходы которого с пятого по седьмой связаны с входами с семнадцатого по девятнадцатый блока комплексирования информации непосредственно, при этом шесть выходов вычислителя начальных данных соединены с входами с седьмого по двенадцатый вычислителя навигационных параметров и с входами с седьмого по двенадцатый блока комплексирования информации, первая группа входов с первого по шестой которого соединена с одноименными входами вычислителя навигационных параметров, девять выходов которого соединены с одноименными выходами системы непосредственно, а тринадцатый вход блока комплексирования информации связан с первым выходом блока спутниковой навигационной информации непосредственно, при этом выходы блока комплексирования информации с первого по третий соединены с группой входов блока спутниковой навигационной информации, а выходы с четвертого по двенадцатый соединены с выходами системы с десятого по восемнадцатый непосредственно, отличающаяся тем, что в нее дополнительно введен вспомогательный измеритель проекций абсолютной угловой скорости, три выхода которого соединены с входами с четвёртого по шестой блока обнаружения, локализации и компенсации отказа, первая тройка входов которого подключена к одноименным выходам измерителя проекций абсолютной угловой скорости и соединена с одноименными входами вычислителя начальных данных, а выходы с первого по третий соединены с одноименными входами вычислителя навигационных параметров и блока комплексирования информации.
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА С КОМБИНИРОВАННЫМ ИСПОЛЬЗОВАНИЕМ СПУТНИКОВЫХ ДАННЫХ | 2007 |
|
RU2334199C1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| Способ флотационного разделения фосфатных и карбонатных минералов | 1955 |
|
SU105755A1 |

