Изобретение относится к способу управления движением транспортного средства, устройству для управления движением транспортного средства и системе управления движением транспортного средства.
В грузопассажирских автомобилях, например, грузовых автомобилях, могут быть смонтированы системы-ассистенты водителя, которые могут выполнять, в частности, специфические, ограниченные функции.
Изобретением поставлена задача предоставления улучшенного способа управлением движением транспортного средства, улучшенного устройства для управления движением транспортного средства и улучшенной системы управления движением транспортного средства.
В соответствии с изобретением задачу решают с помощью способа управления движением транспортного средства, устройства для управления движением транспортного средства и системы управления движением транспортного средства с признаками независимых пунктов формулы изобретения. Предпочтительные варианты осуществления и усовершенствования изобретения вытекают из последующих зависимых пунктов формулы изобретения.
В соответствии с вариантами осуществления настоящего изобретения может быть предложена, в частности, система управления движением для транспортных средств, в частности, грузовых автомобилей, которые по мере необходимости в совокупности с тормозной системой транспортного средства могут принять на себя, в частности, для высокоавтоматизированного движения, выполнение функций координации и преобразования продольной направляющей и поперечной направляющей транспортного средства. Интерфейс для вождения с высокой степенью автоматизации может представлять собой при этом коридор движения, в котором должно двигаться транспортное средство, и профиль скорости или профиль ускорения, которые должно преобразовать транспортное средство. Система управления движением может, в частности, совместно с тормозной системой, с учетом информаций о транспортном средстве, например, рассчитывать статические и динамические характеристики транспортного средства, среди прочего заданную траекторию для транспортного средства.
В соответствии с вариантами осуществления настоящего изобретения с помощью системы управления движения, среди прочего, может быть скоординировано и достигнуто, в частности, комфортабельное и энергосберегающее преобразование, среди прочего, такой заданной траектории. В экстремальных диапазонах динамики движения может присутствовать, например, установление связи между продольной динамикой и поперечной динамикой транспортного средства. Для обеспечения возможности продвижения ассистирующих систем вплоть до этого диапазона с помощью системы управления движением можно создать возможность быстрого и несложного овладения взаимодействием продольной динамикой и поперечной динамикой. Эта система управления движением может быть реализована в совокупности с тормозной системой или размещена в тормозной системе. Тем самым, могут быть, в частности, выполнены требования к высокоавтоматизированному движению при возможности достижения согласования функций-ассистентов водителя, в частности, в критических в отношении динамики движения транспортных ситуациях. Интерфейс системы управления движением может быть выполнен, например, таким образом, что обеспечена возможность несложного и одновременно надежного регулирования осуществляющих доступ к ней функций-ассистентов водителя, вплоть до высокоавтоматизированного движения. Интерфейс системы управления движением может служить, в частности, в качестве абстрактного уровня для регулировки динамики движения, которое может объединять в себе продольную направляющую и поперечную направляющую транспортного средства, и вышеуказанные функции-ассистенты водителя могут обеспечить несложное и не критичное во времени регулирование связи между продольной и поперечной динамикой.
Представлен способ управления движением транспортного средства, причем транспортное средство содержит систему управления движением транспортного средства, которая содержит по меньшей мере одно устройство формирования данных для формирования предварительно заданных данных для движения транспортного средства, по меньшей мере одно устройство предоставления данных для предоставления по меньшей мере одной характеристики движения транспортного средства и по меньшей мере один исполнительный орган для оказания влияния на движение транспортного средства, причем способ содержит, по меньшей мере, следующие этапы:
считывание предварительно заданных данных из интерфейса с устройством формирования данных, причем предварительно заданные данные представляют коридор движения и дополнительно или альтернативно профиль скорости транспортного средства для участка трассы и по меньшей мере одну характеристику транспортного средства из интерфейса с по меньшей мере одним устройством предоставления данных;
определение управляющих данных для транспортного средства с использованием указанных предварительно заданных данных и указанной по меньшей мере одной характеристики транспортного средства, причем управляющие данные могут быть использованы для управления движением транспортного средства с соблюдением указанных предварительно заданных данных;
выявление по меньшей мере одной регулирующей величины для по меньшей мере одного исполнительного органа с использованием указанных управляющих данных; и
выведение по меньшей мере одной регулирующей величины на интерфейс с указанным по меньшей мере одним исполнительным органом.
При этом под управлением можно также понимать регулирование. В случае транспортного средства речь может идти о транспортном средстве промышленного назначения, в частности, о грузовом автомобиле или ином дорожном транспортном средстве. Система управления движением транспортного средства может содержать устройство формирования данных и по меньшей мере одно дополнительное устройство. Коридор движения может описывать поверхность на дороге, внутри которой должно двигаться транспортное средство. Ни в какой момент времени транспортное средство не должно покидать эту поверхность. В простом случае коридор движения может быть определен левой маркировкой дорожного полотна и правой маркировкой дорожного полотна. В более сложных случаях коридор движения может быть ограничен статическими и/или динамическими препятствиями. Таким образом, коридор движения может зависеть от времени.
В соответствии с одним вариантом осуществления изобретения на этапе определения в качестве управляющих данных определяют с использованием предварительно заданных данных и по меньшей мере одной характеристики транспортного средства заданную траекторию и дополнительно или альтернативно заданный профиль скорости для транспортного средства. Такой вариант осуществления изобретения обеспечивает преимущество, заключающееся в том, что с помощью способа можно оказывать влияние или управлять как продольной направляющей, так и поперечной направляющей транспортного средства.
Также на этапе определения в качестве по меньшей мере одной регулирующей величины может быть определен параметр рулевого управления для исполнительного механизма рулевого управления и дополнительно или альтернативно величина ускорения для приводной системы и дополнительно или альтернативно для тормозной системы транспортного средства. Параметр рулевого управления можно использовать для управления или регулирования движения транспортного средства в поперечном направлении при использовании исполнительного механизма рулевого управления. Параметр рулевого управления может выражать угла поворота рулевого колеса, интенсивность рыскания, поперечного ускорения, вывода интенсивности рыскания, интенсивности углов поворота или комбинаций этих величин. Такой вариант осуществления изобретения обеспечивает то преимущество, что для транспортного средства можно надежно и безошибочно осуществить реализацию как заданной траектории, так и дополнительно или альтернативно заданного профиля скорости.
Далее, на этапе считывания могут быть считаны следующие предварительно заданные данные из интерфейса с по меньшей мере одним устройством-ассистентом водителя, датчика данных движения и дополнительно или альтернативно датчика окружающей среды транспортного средства. При этом на этапе определения можно определить управляющие данные с использованием дополнительных предварительно заданных данных. По меньшей мере один датчик движения может быть выполнен для предоставления данных о движении применительно к движению транспортного средства. При этом датчик движения может также быть частью тормозной системы транспортного средства. По меньшей мере один датчик окружающей среды может быть выполнен для регистрации окружающей обстановки транспортного средства. Такой вариант осуществления изобретения создает то преимущество, что движение транспортного средства можно стабилизировать в соответствии с предварительно заданными данными, в частности, также при неблагоприятных условиях. С помощью такой стабилизации транспортного средства, например, также с использованием системы ABS (антиблокировочная система) и дополнительно или альтернативно системы ESP (система динамической стабилизации автомобиля) можно соблюдать коридор движения также в критических с точки зрения динамики движения ситуациях движения.
Способ может включать в себя также этап осуществления проверки системы управления движением транспортного средства и дополнительно или альтернативно тормозной системы транспортного средства на предмет выявления ошибок. При этом на этапе определения в зависимости от результата проверки, проведенной на этапе осуществления проверки, могут быть определены управляющие данные, которые могут быть использованы для управления движением транспортного средства, чтобы обеспечить остановку транспортного средства с учетом окружающей обстановки транспортного средства. Такой вариант осуществления изобретения создает то преимущество, что может быть обеспечена возможность сохранения функции движения или надежного и контролируемого движения транспортного средства, по меньшей мере, в течение определенного минимального промежутка времени. При такой концепции, называемой «ошибкоустойчивой (надежной)» или функционально работоспособной в случае возникновения ошибки, архитектура тормозной системы выполняется таким образом, что при возникновении ошибки в рассматриваемом компоненте указанная ошибка может быть выявлена и применено соответствующее реагирование на нее. Тем самым, можно реализовать, по меньшей мере, части концепции «ошибкоустойчивой» безопасности для тормозной системы и рулевого управления.
В соответствии с вариантом осуществления изобретения способ может включать в себя также этап выявления данных о состоянии движения транспортного средства с использованием сигнала датчика от по меньшей мере одного датчика транспортного средства. При этом данные о состоянии движения представляют специфические в отношении движения величины и предельные значения при движении. Далее, способ может включать в себя этап передачи выявленных данных о состоянии движения на интерфейс с по меньшей мере одним устройством системы управления движением транспортного средства. Такой вариант осуществления изобретения создает то преимущество, что может быть установлена обратная связь между актуальными данными о состоянии движении транспортного средства и устройством системы управления движением транспортного средства и, таким образом, могут быть для осуществления способа подготовлены и введены точные и ситуативно корректные предварительно заданные данные.
Также на этапе считывания в качестве предварительно заданных данных из интерфейса с по меньшей мере одним устройством-ассистентом водителя транспортного средства может быть введен по меньшей мере один заданный параметр рулевого управления. К тому же на этапе определения управляющие данные могут быть определены с использованием, по меньшей мере, одного заданного параметра рулевого управления. Далее, на этапе определения при использовании управляющих данных может быть определен комбинированный параметр рулевого управления в качестве указанной по меньшей мере одной регулирующей величины. Такой вариант осуществления изобретения создает то преимущество, что как и с помощью координатора, заданные параметры рулевого управления рассматриваемых функций-ассистентов водителя могут быть обобщены на основании логики.
В частности, на этапе считывания в качестве по меньшей мере одной характеристики транспортного средства может быть введена по меньшей мере одна статическая характеристика транспортного средства и дополнительно или альтернативно по меньшей мере одна динамическая характеристика транспортного средства. При этом по меньшей мере одна характеристика транспортного средства может представлять информацию по меньшей мере одного датчика транспортного средства, кривую траектории, описываемой задними колёсами тягача и колёсами прицепа при движении передних управляемых колёс тягача по кругу в случае транспортного средства, состоящего из нескольких частей с тягачом и полуприцепом или прицепом, позицию точки седла между тягачом и полуприцепом, размер прицепа или полуприцепа транспортного средства, конфигурацию оси, расстояние между осями колесных пар, допустимое поперечное ускорение, расположение центра тяжести, предел по условиям опрокидывания и дополнительно или альтернативно характеристику рулевого управления. Такой вариант осуществления изобретения создает преимущество возможности надежного и точного управления движением транспортного средства с соблюдением предварительно заданных данных.
Представленная здесь исходная идея обеспечивает создание устройства для осуществления этапов одного из вариантов представленного здесь способа в соответствующих устройствах, управления ими или их реализации. Также с помощью этого варианта осуществления изобретения в виде устройства можно быстро и эффективно решить задачу, положенную в основу изобретения.
Для этого устройство может содержать решающий блок для обработки сигналов и данных, по меньшей мере одно запоминающее устройство для запоминания сигналов или данных, по меньшей мере один интерфейс для датчика или исполнительного механизма для ввода сигналов датчика или вывода информационных или управляющих сигналов на исполнительный механизм и/или по меньшей мере один коммуникационный интерфейс для ввода или вывода данных, которые включены в коммуникационный протокол. Решающий блок может представлять собой, например, процессор обработки сигналов, микроконтроллер или т.п., причем запоминающее устройство может представлять собой флэш-память, электрически стираемое программируемое постоянное запоминающее устройство или магнитный блок памяти. Коммуникационный интерфейс может быть выполнен для беспроводного и/или осуществляемого через линию ввода или вывода данных, причем коммуникационный интерфейс, который может осуществлять ввод или вывод привязанных к линии данных, может осуществлять ввод этих данных, например, электрически или оптически, из соответствующей линии передачи данных или их вывод в соответствующую линию передачи данных.
Под устройством в настоящем случае понимают электрическое устройство, которое обрабатывает сигналы датчиков и в зависимости от этого выводит управляющие и/или информационные сигналы. Устройство может содержать интерфейс, который может быть выполнен в соответствии с аппаратными и/или программными средствами. При исполнении посредством аппаратных средств интерфейсы могут представлять собой, например, часть так называемой системы ASIC (интегральная схема специального назначения), содержащей различные функции устройства. Однако возможно также, что интерфейсы представляют собой самостоятельные интегральные схемы или, по меньшей мере, частично состоят из дискретных конструктивных элементов. При исполнении посредством программных средств интерфейсы могут представлять собой модули программного обеспечения, которые содержатся, например, в микроконтроллере наряду с другими модулями программного обеспечения.
Представлена также система управления движением транспортного средства для транспортного средства, причем транспортное средство содержит по меньшей мере одно устройство предоставления данных для предоставления по меньшей мере одной характеристики транспортного средства и по меньшей мере один исполнительный орган для оказания влияния на движение транспортного средства, причем система управления движением транспортного средства содержит, по меньшей мере, следующие признаки:
устройство формирования данных для формирования предварительно заданных данных для движения транспортного средства, и
вариант осуществления устройства, охарактеризованного выше; указанное устройство соединено, по меньшей мере, с устройством формирования данных, причем соединено с возможностью передачи сигналов.
Таким образом, в сочетании с системой управления движением транспортного средства вариант устройства, охарактеризованного выше, предпочтительно может быть реализован и применен для управления движением транспортного средства. Система управления движением транспортного средства может содержать по меньшей мере одно дополнительное устройство. Указанное по меньшей мере одно дополнительное устройство может быть соединено с возможностью передачи сигналов с устройством формирования данных и дополнительно или альтернативно с указанным устройством.
Примеры вариантов осуществления представленной здесь концепции изображены на чертежах и пояснены более подробно в последующем описании. Фигуры показывают:
фиг. 1 показывает схематическое изображение транспортного средства с системой управления движением транспортного средства в соответствии с вариантом осуществления изобретения;
фиг. 2 показывает блок-схему способ для управления в соответствии с вариантом осуществления изобретения;
фиг. 3 показывает схематическое изображение системы управления движением транспортного средства в соответствии с вариантом осуществления изобретения;
фиг. 4 показывает схематическое изображение ситуации дорожного движения в соответствии с вариантом осуществления изобретения;
фиг. 5 показывает схематическое изображение ситуации дорожного движения в соответствии с вариантом осуществления изобретения;
фиг. 6 показывает схематическое изображение ситуации дорожного движения в соответствии с вариантом осуществления изобретения;
фиг. 7 показывает схематическое изображение ситуации дорожного движения в соответствии с вариантом осуществления изобретения;
фиг. 8 показывает схематическое изображение первого компонента устройства управления из фиг. 3.
Перед описанием вариантов осуществления настоящего изобретения сначала следует кратко пояснить существо настоящего изобретения.
Система-ассистент движения с выдерживанием дистанции для транспортных средств (АСС = адаптивный круиз-контроль) поддерживает водителя лишь при продольном направлении, а система-ассистент удержания полосы движения (LKS = система удержания полосы движения) поддерживает водителя только при поперечной направляющей транспортного средства. Система-ассистент аварийного торможения (AEBS = усовершенствованная система аварийного торможения; аварийный тормоз), напротив, предупреждает о грозящей опасности столкновения при связанных с наездом транспортных происшествиях и инициирует торможение при отсутствии реакции со стороны водителя для предотвращения столкновения. Система AEBS, однако, не выполняет функции, связанные с поперечной направляющей.
Например, система АСС обычно выполнена как система для комфорта таким образом, что можно инициировать замедление лишь, например, до 3 м/с2. Если дорожная ситуация требует более резкого замедления, например, при неожиданном резком торможении впереди идущего транспортного средства, то система АСС передает водителю требование приема управления (“Take Over Request”, требование приема управления на себя), чтобы он вновь принял управление на себя и инициировал более интенсивное торможение нажатием на педаль тормоза. Если водитель не выполняет этого и возникает угроза наезда, то функция AEBS запускает, например, каскад мер, состоящих из акустического предупреждения, частичного и полного торможения, и предотвращает столкновение или, по меньшей мере, смягчает его последствия. Система ACC могла бы среагировать в ситуации раньше и, тем более, не позволила бы возникнуть критической ситуации столкновения, если бы система АСС могла бы затребовать замедление большее, например, чем 3 м/с2. Затребование более резкого замедления может быть, однако, критичным в отношении безопасности в зависимости от дорожного покрытия и погодных условий. Хотя системы ABS и ESP и заботятся об управляемости и стабилизации транспортного средства, водитель должен, однако, при этом самостоятельно управлять транспортным средством, чтобы удерживать полосу или курс уклонения.
Например, системы АСС и AEBS для осуществления регулировки продольного движения по отдельности управляют через стандартизованные интерфейсы работой двигателя, коробки передач и тормозной системы, которые, например, локально берут на себя координацию запросов или принятие решения на основании приоритетно управляемой логики. Система LKS через собственный интерфейс задает исполнительному устройству рулевого управления заданный угол для рулевого колеса. Объемы и рабочие области многих известных функций-ассистентов выбраны, в частности, таким образом, что они разграничены между собой и при их воздействии возникает незначительная связь между продольной и поперечной динамикой движения. Согласование таких систем-ассистентов водителя друг с другом и их защита могут быть упрощены в соответствии с примерами осуществления настоящего изобретения.
В последующем описании предпочтительных примеров осуществления настоящего изобретения для изображенных на различных фигурах и одинаково действующих элементов использованы одинаковые или аналогичные ссылочные обозначения, причем повторное описание этих элементов опущено.
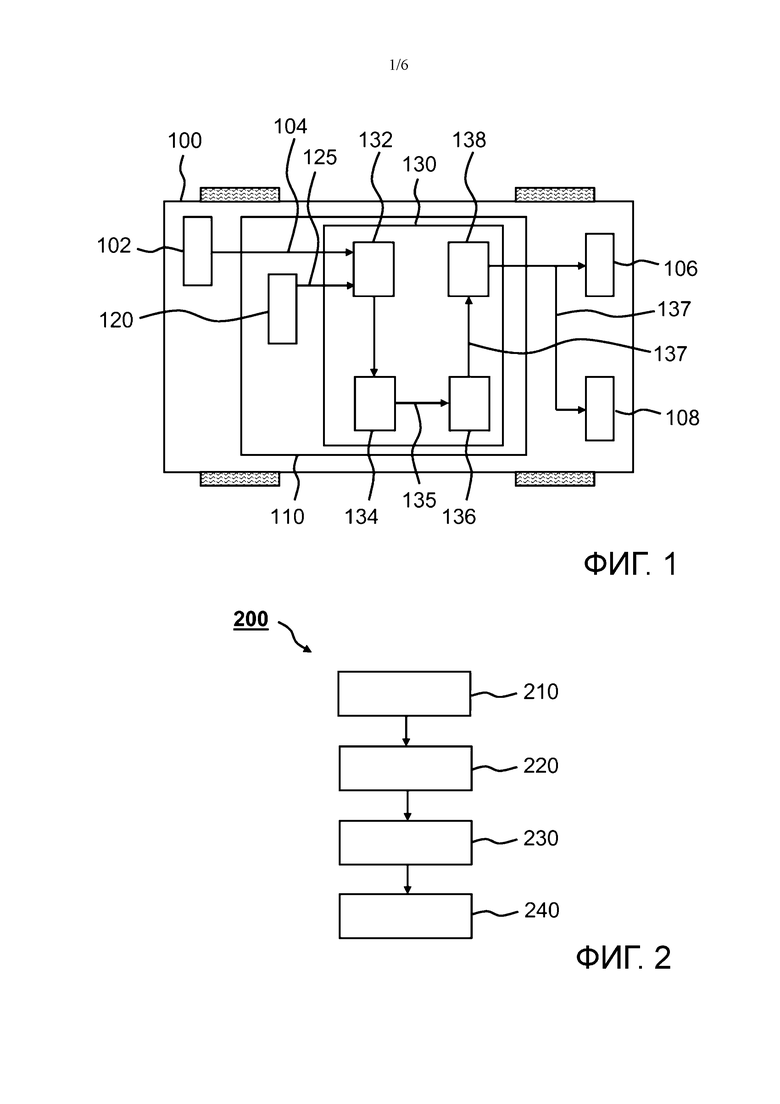
Фиг. 1 показывает схематическое изображение транспортного средства 100 с системой 110 управления движением транспортного средства в соответствии с вариантом осуществления изобретения. В случае транспортного средства 100 речь идет при этом о транспортном средстве промышленного назначения, в частности, грузовом автомобиле, по мере необходимости с прицепом или полуприцепом. Система 110 управления движением транспортного средства выполнена для планирования, координации или управления движением транспортного средства 100.
В соответствии с показанным на фиг. 1 примером для транспортного средства 100 изображены в качестве примера лишь устройство 102 предоставления данных для предоставления данных в виде сигнала по меньшей мере одной характеристики 104 транспортного средства 100, в качестве примера лишь первый исполнительный орган 106 и второй исполнительный орган 108 для оказания влияния на движение транспортного средства 100, а также система 110 управления движением транспортного средства.
Устройство 102 предоставления данных содержит по меньшей мере одно запоминающее устройство и/или по меньшей мере одно сенсорное устройство транспортного средства 100. По меньшей мере одна характеристика 104 транспортного средства представляет собой сенсорную информацию по меньшей мере одного датчика транспортного средства, размеров транспортного средства, траектории, описываемой задними колёсами тягача и колёсами прицепа при движении передних управляемых колёс тягача по кругу, если транспортное средство состоит из нескольких частей с тягачом и полуприцепом или прицепом, позиции точки седла между тягачом и полуприцепом или прицепом, размеров прицепа или полуприцепа транспортного средства, конфигурации оси, расстояния между осями колесных пар, допустимого поперечного ускорения, положения центра тяжести, предела по условиям опрокидывания и/или характеристики рулевого управления.
В случае первого исполнительного органа 106 речь идет, например, об исполнительном механизме рулевого управления, исполнительном механизме угла рулевого колеса или т.п. В случае второго исполнительного органа 108 речь идет о тормозном устройстве и/или ветви привода, например, включая двигатель и коробку передач.
Применительно к системе 110 управления движением транспортного средства в соответствии с показанным на фиг. 1 примером осуществления изобретения изображено устройство 120 формирования данных для формирования предварительно заданных данных 125 для движения транспортного средства 100 и устройство 130 управления или устройство 130 для управления движением транспортного средства 100. Устройство 120 формирования данных и устройство 130 управления соединены между собой с возможностью передачи сигналов.
Устройство 120 формирования данных выполнено с возможностью передачи предварительно заданных данных 125 на устройство 130 управления или для вывода данных на устройство 130 управления. При этом предварительно заданные данные 125 представляют собой коридор движения и/или профиль скорости для транспортного средства 100, в частности, для подлежащего прохождению участка трассы. Предварительно заданные данные 125 формируются с помощью устройства 120 формирования данных и при необходимости с помощью следующих устройств системы 110 управления движением транспортного средства.
В соответствии с показанным на фиг. 1 примером устройство 130 управления содержит блок 132 считывания, блок 134 определения, блок 136 выявления и блок 138 вывода. При этом блок 132 считывания выполнен с возможностью считывания предварительно заданных данных 125 из интерфейса с устройством 120 формирования данных. Далее, блок 132 считывания выполнен с возможностью считывания по меньшей мере одной характеристики 104 транспортного средства из интерфейса с по меньшей мере одним устройством 102 предоставления данных. К тому же блок 132 выполнен с возможностью дальнейшей передачи предварительно заданных данных 125 и по меньшей мере одной характеристики 104 транспортного средства на блок 134 определения.
Блок 134 определения выполнен с возможностью последующего определения управляющих данных 135 для транспортного средства 100 с использованием предварительно заданных данных 125 и по меньшей мере одной характеристики 104 транспортного средства. Управляющие данные 135 могут быть использованы для управления движением транспортного средства 100 с соблюдением предварительно заданных данных 125. Управляющие данные 135 представляют, в частности, заданную траекторию и/или заданный профиль скорости для транспортного средства 100. Также блок 134 определения выполнен с возможностью дальнейшей передачи определенных управляющих данных 135 на блок 136 выявления.
Блок 136 выявления выполнен с возможностью получения по меньшей мере одной регулирующей величины 137 для исполнительных органов 106 и 108 с использованием управляющих данных 135 блока 134 выявления. По меньшей мере одна регулирующая величина выражает, например, параметр рулевого управления для исполнительного механизма рулевого управления и/или величину ускорения для приводной системы и/или тормозной системы транспортного средства 100. Параметр рулевого управления выражает, в частности, угол поворота рулевого колеса или альтернативно частоту рыскания, поперечное ускорение, дифференцирование частоты рыскания, частоту изменения угла рулевого колеса или комбинацию этих величин. Далее, блок выявления выполнен с возможностью дальнейшей передачи по меньшей мере одной регулирующей величины 137 на блок 138 вывода. Блок 138 вывода выполнен с возможностью вывода по меньшей мере одной определенной регулирующей величины 137 на интерфейс с исполнительными органами 106 и 108.
В соответствии с одним вариантом система 110 управления движением транспортного средства и/или устройство 130 управления могут быть выполнены, по меньшей мере, частично в виде части тормозной системы транспортного средства 100.
Фиг. 2 показывает блок-схему способа 200 управления в соответствии с вариантом осуществления изобретения. Способ 200 управления может быть осуществлен для управления движением транспортного средства. При этом способ 200 управления может быть осуществлен для управления движением транспортного средства из фиг. 1 или аналогичного транспортного средства. Способ 200 управления может быть осуществлен в совокупности с использованием или при использовании системы управления движением транспортного средства и устройства управления из фиг. 1 или аналогичной системы или аналогичного устройства.
Способ 200 управления содержит этап 210 считывания предварительно заданных данных из интерфейса с устройством формирования данных и по меньшей мере одной характеристики транспортного средства из интерфейса с по меньшей мере одним устройством предоставления данных. Предварительно заданные данные представляют коридор движения и/или профиль скорости транспортного средства для участка трассы.
В последующем в способе 200 управления на этапе 220 определения с использованием предварительно заданных данных и по меньшей мере одной характеристики транспортного средства, которые были считаны на этапе 210 считывания, определяют управляющие данные для транспортного средства. Управляющие данные можно использовать для управления движением транспортного средства с соблюдением предварительно заданных данных.
В последующем в способе 200 управления на этапе 230 выявления с использованием определенных на этапе 220 определения управляющих данных получают по меньшей мере одну регулирующую величину для по меньшей мере одного исполнительного органа.
В последующем в способе 200 управления на этапе 240 вывода осуществляют вывод по меньшей мере одной регулирующей величины на интерфейс по меньшей мере с одним исполнительным органом.
В соответствии с примером осуществления изобретения, на этапе 210 считывания в качестве по меньшей мере одной характеристики транспортного средства вводят по меньшей мере одну статическую характеристики транспортного средства и/или по меньшей мере одну динамическую характеристику транспортного средства. Также в соответствии с примером осуществления изобретения на этапе 220 определения с использованием предварительно заданных данных и по меньшей мере одной характеристики транспортного средства в качестве управляющих данных определяют заданную траекторию и/или заданный профиль скорости для транспортного средства. Далее, на этапе 230 выявления в качестве по меньшей мере одной регулирующей величины определяют параметр рулевого управления для исполнительного механизма рулевого управления и/или величину ускорения для приводной системы и/или тормозной системы транспортного средства.
В соответствии со следующим вариантом осуществления изобретения на этапе 210 считываются предварительно заданные данные из интерфейса по меньшей мере с одним устройством-ассистентом водителя, датчиком движения и/или датчиком окружающей среды. При этом на этапе 210 обнаружения с использованием следующих предварительно заданных данных определяют управляющие данные.
Дополнительно или альтернативно на этапе 210 считывания в качестве предварительно заданных данных из интерфейса по меньшей мере с одним устройством-ассистентом водителя автомобиля может быть считываться по меньшей мере один предварительно заданный параметр рулевого управления. На этапе 220 определения управляющие данные могут быть определены с использованием указанного по меньшей мере одного предварительно заданного параметра рулевого управления. Затем на этапе 230 выявления с использованием управляющих данных в качестве по меньшей мере одной регулирующей величины может быть получен комбинированный параметр рулевого управления.
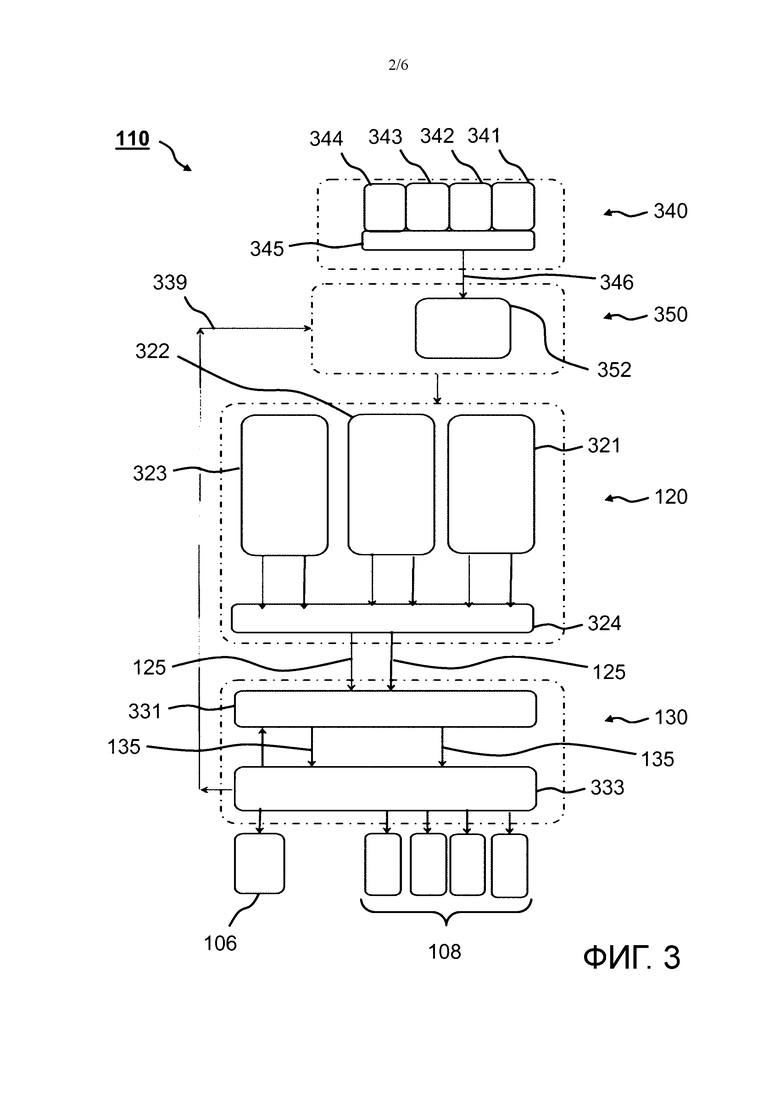
Фиг. 3 показывает схематическое изображение системы 110 управления движением транспортного средства в соответствии с вариантом осуществления изобретения. Система 110 управления движением транспортного средства соответствует или подобна системе управления движением транспортного средства из фиг. 1. Система 110 управления движением транспортного средства выполнена с возможностью реализации функций для высокоавтоматизированного движения (HAD = highly automated driving (высокоавтоматизированное движение). Систему 110 управления движением транспортного средства можно также назвать архитектурой HAD. Другими словами, фиг. 3 показывает, в частности, встраивание устройства 130 управления или того, что называется контроллером 130 перемещения, в систему 110 управления движением транспортного средства или в архитектуру HAD.
Другими словами, на фиг. 3 с помощью системы 110 управления движением транспортного средства показана схематично функциональная архитектура для высокоавтоматизированного движения. В соответствии с показанным на фиг. 3 примером осуществления изобретения система 110 управлением движением транспортного средства содержит четыре части или модуля, которые могут соответствовать, например, четырем вышеуказанным этапам обработки данных.
В соответствии с вариантом осуществления изобретения, показанным на фиг. 3, эти четыре части системы 110 управления движением транспортного средства, показанные исключительно для примера, представляют собой устройство 120 формирования данных или так называемый планировщик 120 движения, устройство 130 управления или так называемый контроллер 130 движения, устройство 340 объединения и локализации (Fusion&Localization) и устройство 350 планирования режима работы или так называемый планировщик 350 режима работы (Behaviour Planner).
Устройство 340 объединения и локализации выполнено с возможностью сбора доступной информаций от датчиков 341 и других источников, например, коммуникационного устройства 342, устройства 343 для дорожных карт и устройства 344 для определения координат местоположения транспортного средства или GPS-координат с помощью устройства 345 для осуществления объединения и локализации данных в центральной модели 346 внешней среды, типа базы данных, и с возможностью последующего предоставления указанной информации в обработанном виде для последующих этапов обработки данных.
В качестве источников информации среди прочих можно использовать указанные ниже: датчики 341 окружающей среды, установленные на транспортном средстве и основанные на радаре, камере, лидаре, ультразвуковых датчиках и т.п.; заранее заданные данные о движении, такие как положение педали газа и педали тормоза, угол поворота рулевого колеса и момент сопротивления повороту; оцененные ли рассчитанные величины, такие как, например, состояние движения транспортного средства, масса транспортного средства, нагрузки на ось, ожидаемый тормозной путь, пределы поперечного ускорения, требующееся пространство для маневра уклонения, причем для этих расчетов используют информацию датчиков 341, которые встроены в транспортное средство и считываются и контролируются, например, с помощью тормозной системы транспортного средства, например, следующих датчиков: датчики числа оборотов; датчики скорости вращения и ускорения; коммуникации «транспортное средство - транспортное средство» или «транспортное средство - инфраструктура» (V2V, V2I, V2X); высокоточных дорожных карт и координат GPS. Такая информация дополнительно обрабатывается для модели 346 внешней среды. Таким образом, модель 346 внешней среды предоставляет профиль отдельной полосы движения и соседних полос движения, актуальную позицию и ориентацию транспортного средства в собственной полосе движения и имеющееся пространство на дороге, в пределах которого может перемещаться транспортное средство. Для этого могут быть привлечены актуальные позиции неподвижных и динамических препятствий. Позиции динамических препятствий, такие как транспортные средства на рассматриваемой полосе и в соседних полосах движения, также могут прогнозироваться для определенного временного горизонта.
Планировщик 350 режима работы выполнен с возможностью определения актуальной стратегии движения. На основании информации модели 346 внешней среды, например, характеристики полосы движения и свободных участков, планирования маршрута, например, с помощью навигационной системы, и параметрических значений актуальной динамики транспортного средства с помощью устройства 352 принятия решения делают вывод о том, остается ли само транспортное средство в пределах полосы движения, меняет ли оно полосу движения на соседнюю или должно ли оно выполнить аварийный маневр или так называемый маневр минимального риска. При этом следует сделать ссылку на приведенные ниже фигуры.
Устройство 130 управления выполнено с возможностью предоставления данных 339 о состоянии движения и/или параметрических значений 339 актуальной динамики транспортного средства в планировщик 350 режима работы. Параметрические значения 339 определяют диапазоны для комфортабельного движения и зависимые от транспортного средства и специфические в зависимости от ситуации границы физических параметров движения. Для этого в соответствии показанным примером осуществления изобретения устройство 130 управления выполнено с возможностью выполнения этапа выявления данных 339 о состоянии движения транспортного средства с использованием сигнала датчика от по меньшей мере одного датчика транспортного средства, и этапа передачи выявленных данных 339 о состоянии движения на интерфейс с планировщиком 350 режима работы системы 110 управления движением транспортного средства.
Планировщик 350 режима работы принимает решение на основании оценки риска. Для этого, на основании логики принятия решений, например, на основании функции стоимости для возможных вариантов действий, таких как сохранение полосы движения, смена полосы движения, аварийный маневр и маневр минимального риска, рассчитывается величина и выбирается функция движения, которая передается на устройство 120 формирования данных и/или планировщик 120 движения. Кроме того, осуществляют параметризацию функции движения на основании параметрических значений актуальной динамики транспортного средства для достижения комфортабельного, энергосберегающего, стабильного в смысле динамики движения и безопасного способа движения.
Ниже в качестве примера пояснены типичные функции движения для высокоавтоматизированного движения для автомагистралей. При этом различают управление транспортным средством в продольном и поперечном направлении, которые должны быть согласованы между собой, как в случае маневра смены полосы движения, маневра уклонения и маневра минимального риска, поскольку, например, вливание в текущий дорожный поток может быть критично во времени. Ситуацию движения различают применительно к комфортабельному движению и аварийным ситуациям, причем переход может быть плавным. Функции-ассистенты водителя, такие как круиз-контроль или Cruise Control (CC), движение с соблюдением дистанции или Adaptive Cruise Control (ACC) и система аварийного торможения или Advanced Emergency Brake System (AEBS) предполагаются, но они расширены в смысле рабочего диапазона. Так, например, функцию АСС, которая при серийном производстве обеспечивает актуальное замедление, например, лишь до 3 м/с2, расширяют до максимально возможного продольного замедления. Это возможно, поскольку устройство 130 управления выполнено с возможностью ее осуществления. Система HAD должна непрерывно контролироваться. При распознавании ошибок водитель обязательно должен быть проинформирован об этом и при отсутствии принятия управления на себя должен быть выполнен маневр минимального риска, который должен привести к остановке транспортного средства без столкновения.
Устройство 120 формирования данных или планировщик 120 движения выполнены с возможностью получения и предоставления для функции движения, требуемой планировщиком 350 режима работы, предварительно заданного конкретного коридора движения с запросом ускорения для транспортного средства, используя в качестве предварительно заданных данных 125 дополнительную информацию из модели 346 внешней среды в отношении внешнего окружения, например, траектория дорожного полотна и свободных участков. Устройство 130 управления выполнено с возможностью направления в этом случае транспортного средства внутри этого коридора и в тоже время с реализацией запрошенного ускорения.
Для этого планировщик 120 движения содержит первый блок 321 управления для продольного и поперечного управления в полосе движения, например, в совокупности с функциями движения с соблюдением дистанции, системой аварийного торможения, системой-ассистентом предупреждения о заторах и движении в колонне, второй блок 322 управления для управления сменой полосы движения в совокупности с продольной направляющей и поперечной направляющей транспортного средства и третий блок 323 управления для маневра минимального риска. Каждое из устройств 321, 322 и 323 управления выполнено с возможностью предоставления данных по коридору движения и профилю ускорения и/или запросу ax,dem ускорения. Коридор движения содержит левое ограничение и правое ограничение, которые описаны в качестве функций yl,dem (x, tk) и yr,dem (x, tk) места в заданный момент tk времени с помощью, например, кубического сплайна или с помощью полиномов. Блок 324 определения решения выполнен с возможностью формирования предварительно заданных данных 125 путем определения решения из данных по коридору движения и по запросу ускорения устройств 321, 322 и 323 управления, а также с возможностью вывода предварительно заданных данных 125 на устройство 130 управления.
Устройство 130 управления выполнено с возможностью определения управляющих данных 135 для предварительно заданных данных 125 и/или, среди прочего, для заданного коридора движения на основании специфической характеристики движения, в частности, заданная траектория, вдоль которой устройство 130 управления затем направляет транспортное средство и при необходимости также с целью стабилизации вмешивается в динамику колес и транспортного средства, например, с помощью антиблокировочной системы и электронного пакета стабильности (ABS/ESP). При этом устройство 130 управления в целях наглядности разделено на фиг. 3 исключительно в качестве примера на две части: первый компонент 331 устройства формирует заданные траектории и реализуют их отслеживание. Второй компонент 333 устройства осуществляют стабилизацию транспортного средства.
Из коридора движения устройство 130 управления в первом компоненте 331 устройства определяется канал движения, который изображает все огибающие траектории, описываемые задними колесами тягача и колесами прицепа при движении передних управляемых колес по кругу, всех точек на транспортном средстве. Во втором компоненте 333 устройства 130 управления осуществляют направление транспортного средства внутри этого канала движения и при необходимости его стабилизацию.
Далее, на фиг. 3 показаны исполнительные органы 106 и 108, которые с возможностью передачи сигналов соединены с устройством 130 управления, точнее говоря, со вторым компонентом 333 устройством. В случае первого исполнительного органа 106 речь идет, например, о исполнительном механизме рулевого управления, причем примеры для второго исполнительного органа 108 содержат двигатель, коробку передач, устройства замедления, прицеп и другие устройства.
Фиг. 4 показывает схематическое изображение транспортной ситуации 400 в соответствии с примером осуществления изобретения. В транспортной ситуации 400, например, два транспортных средства 100 двигаются по дороге 401 или дорожному полотну 401. Каждое из транспортных средств 100 соответствует или является аналогичным транспортному средству из фиг. 1 и соответственно содержит систему управления движением транспортного средства из фиг. 1 или фиг. 3 или аналогичную систему. В случае транспортных средств 100 речь идет, например, о грузовых автомобилях с тягачом и полуприцепом.
Далее, в транспортной ситуации 400 участвует постороннее транспортное средство 403, которое представляет собой препятствие для транспортных средств 100. Транспортные средства 100, которые едут, например, колонной одно за другим, находятся в состоянии маневра уклонения со сменой полосы движения относительно постороннего транспортного средства 403. На дороге 401 показано имеющееся пространство 405 для движения транспортных средств 100. К тому же коридор 407 движения изображен с левым и правым ограничениями. Коридор 407 движения представляет предварительно заданные данные для транспортных средств 100. В изображенной транспортной ситуации 400 коридор 407 движения описывает кривую для объезда постороннего транспортного средства 403. Кроме того, в качестве управляющих данных внутри коридора 407 движения показана траектория 409 или путь 409 для транспортных средств 100.
Коридор 407 движения выполнен с возможностью обеспечения устройством 130 управления определения подходящей траектории 409 в коридоре 407 движения. Коридор 407 движения может быть определен таким образом, что по меньшей мере одна траектория 409 находится в коридоре 407 движения. В соответствии с примером осуществления изобретения коридор 407 движения может простираться насколько позволяет имеющееся пространство 405 для движения.
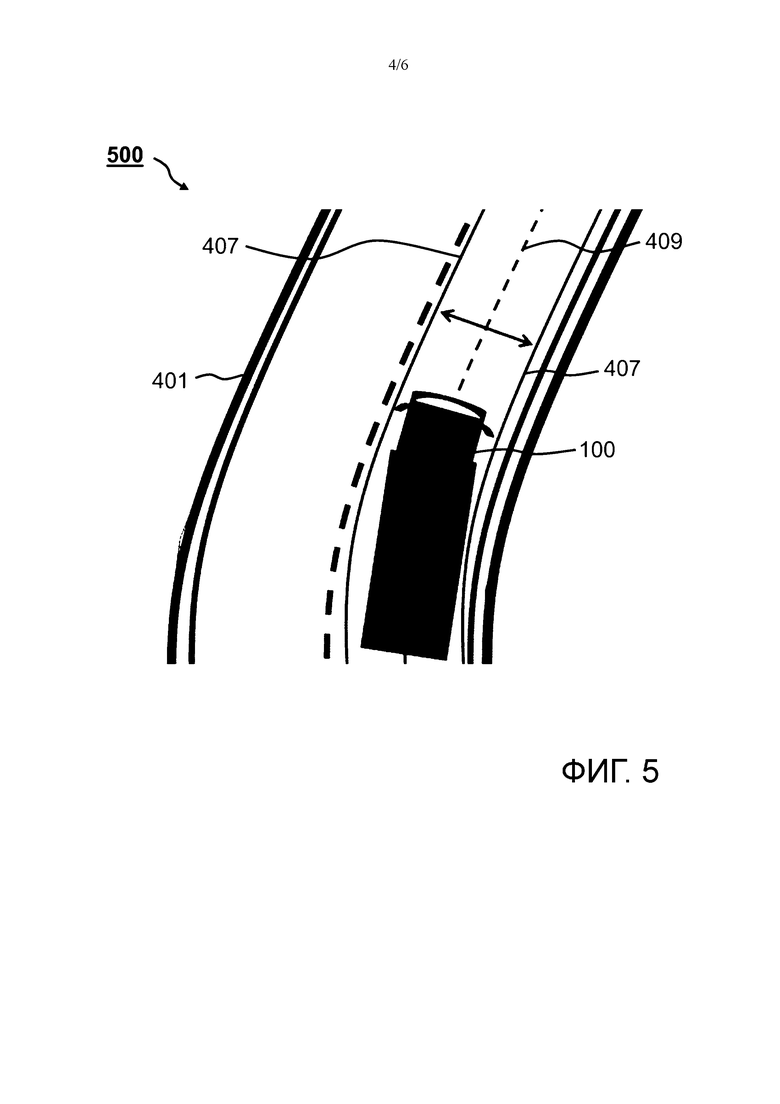
Фиг. 5 показывает схематическое изображение транспортной ситуации 500 в соответствии с примером осуществления изобретения. Транспортная ситуация 500 на фиг. 5 соответствует транспортной ситуации из фиг. 4, за исключением того, что в транспортной ситуации 500 на дороге 401 изображено лишь одно транспортное средство 100, причем транспортное средство 100 двигается в коридоре 407 движения с траекторией 409 по кривой.
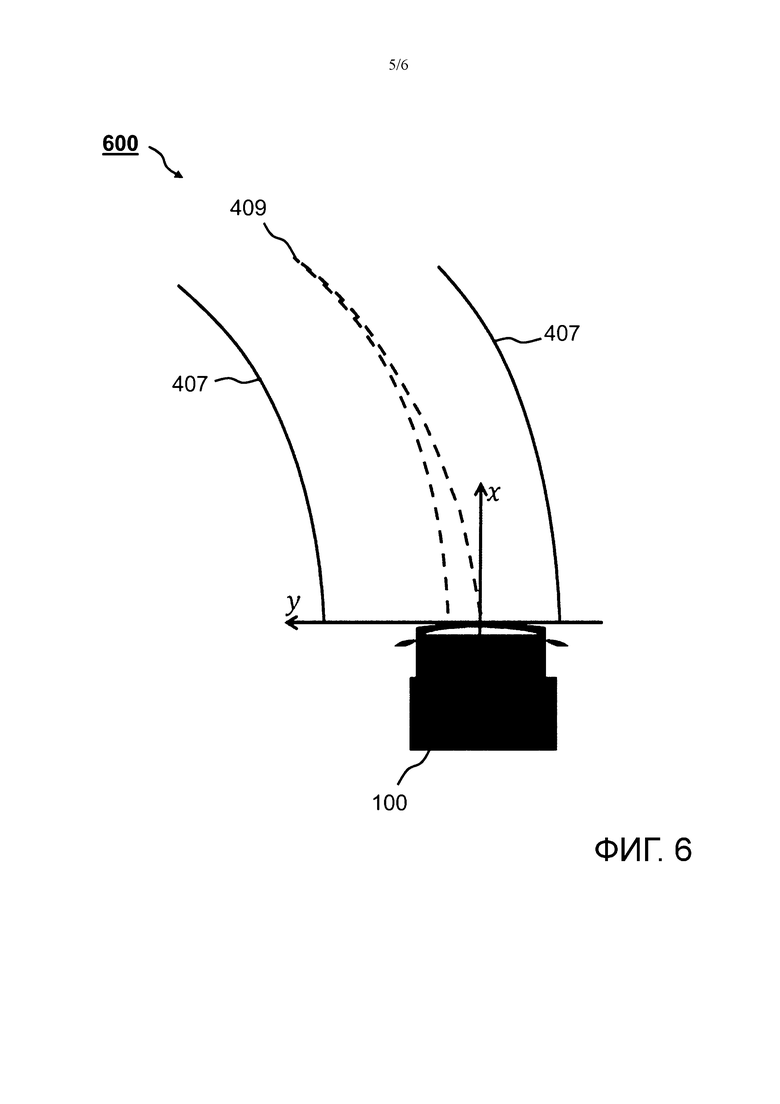
Фиг. 6 показывает схематическое изображение транспортной ситуации 600 в соответствии с примером осуществления изобретения. Транспортная ситуация 600 на фиг. 6 соответствует транспортной ситуации из фиг. 5 за тем исключением, что в транспортной ситуации 600 показаны только транспортное средство 100 и коридор 407 движения с траекторией 409 или эталонной траекторией 409. Для пояснения в центре на передней части транспортного средства 101 показано начало системы координат с осью х абсцисс и осью у ординат.
Коридор 407 движения имеет левое ограничение и правое ограничение, которые могут быть описаны как функции yl,dem(x,tk) и yr,dem(x,tk) пространственных координат в заданный момент tk времени или при актуальном дискретном значении tk с помощью, например, кубического сплина или более обобщенно с помощью полинома y(x)=a0+a1x+a2x2+a3x3. Эталонная траектория 409 может быть описана с помощью функции yF,dem(x,tk).
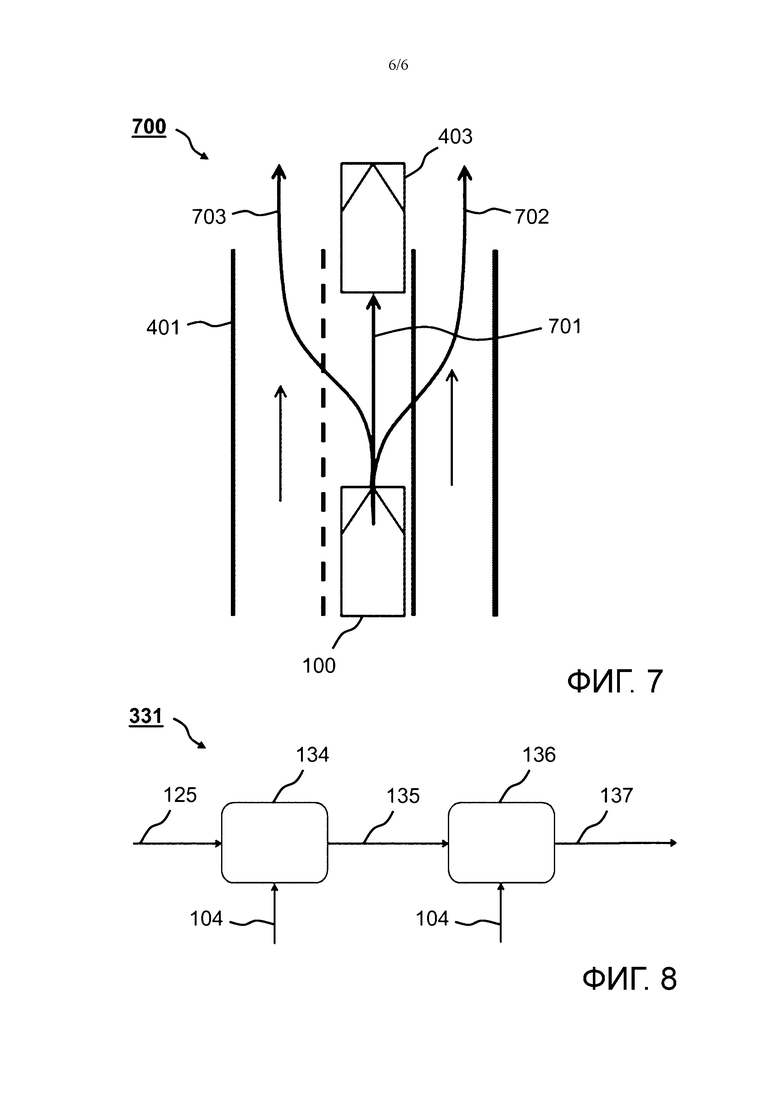
Фиг. 7 показывает схематическое изображение транспортной ситуации 700 в соответствии с примером осуществления изобретения. В транспортной ситуации 700 по дороге 401 или полосе 401 движения двигаются, например, транспортное средство 100 и постороннее транспортное средство 403. Транспортное средство 100 соответствует или аналогично транспортному средству из фиг. 1 и соответственно содержит систему управления движением транспортного средства из фиг. 1 или фиг. 3 или аналогичную систему. В случае дороги 401 речь идет, например, о автомагистрали с двумя полосами движения и одной обочиной. Постороннее транспортное средство 403 находится в направлении движения перед транспортным средством 100 в той же полосе движения, что и транспортное средство 100.
Общеупотребительные функции-ассистенты водителя могут требовать постоянного контроля со стороны водителя, который в случае сбоя или ошибки должен незамедлительно взять управление на себя. Если ошибка возникает в системе-ассистенте водителя, то задача системы-ассистента водителя обычно заключается в том, чтобы надежно распознать ее и затем надежно отключить (“fail silent”). Системы-ассистенты водителя для высокоавтоматизированного движения (например, Highway Pilot (автоматическое вождение)) должны обеспечить возможность для водителя не контролировать постоянно поведение системы-ассистента водителя, а иметь возможность заниматься также другим действием. После возникновения ошибки система-ассистент водителя должна надежно перекрывать определенное время до момента, когда водитель вновь берет на себя управление, то есть должна быть обеспечена возможность автоматического управления и торможения транспортного средства 100 (“fail operational” - надежный). Здесь предполагается, что реализация концепции “fail operational” (надежной) безопасности для тормозной системы и рулевого управления обеспечивается устройством управления системы управления движением транспортного средства 100.
С помощью системы управления движением транспортного средства, например, принимается решение о том, остается ли транспортное средство в полосе движения, меняет ли ее на соседнюю полосу движения или должен выполнить аварийный маневр или маневр минимального риска. Например, первый маневр 701 на фиг. 7 обозначает остановку транспортного средства 100 предписанным образом в собственной полосе движения, что позволяет среагировать находящимся сзади участникам движения. Второй маневр 702 представляет остановку на обочине дороги 401. Третий маневр 703 представляет уклоняющий маневр с выездом на соседнюю полосу и торможение с контролем движения сзади. При этом риск возрастает от первого маневра 701 через второй маневр 702 к третьему маневру 703 движения.
При этом устройство управления системы управления движением транспортного средства 100 выполнено с возможностью проведения проверки системы управления движением транспортного средства и/или тормозной системы транспортного средства 100 на предмет выявления ошибки. Далее, устройство управления выполнено с возможностью определения, в зависимости от результатов проверки, управляющих данных, которые можно использовать для управления движением транспортного средства 100, чтобы обеспечить остановку транспортного средства 100 с учетом окружающей обстановки транспортного средства.
Фиг. 8 показывает схематическое изображение первого компонента 331 системы управления из фиг. 3. При этом первый компонент 331 соответствует или аналогичен компоненту устройства управления, как показано на фиг.1. В соответствии с примером осуществления изобретения, изображенным на фиг. 8, первый компонент 331 устройства управления содержит блок 134 определения и блок 136 выявления.
Входные данные для блока 134 определения представляют собой предварительно заданные данные 125 и характеристики 104 транспортного средства. Предварительно заданные данные 125 представляют, в частности, коридор движения с левым и правым ограничениями yl,dem(x,tk) и yr,dem(x,tk), причем характеристики 104 транспортного средства представляют геометрию транспортного средства и/или кинематику. Блок 134 определения выполнен с возможностью расчета эталонной траектории, причем учитывают охваченный транспортным средством путь. Выходные данные блока 134 определения представляют собой управляющие данные 135, которые выражают, например, эталонную траекторию, которая описывается функцией yF,dem(x,tk).
Входные данные для блока 136 выявления представляют собой управляющие данные 135, поступающие от блока 134 определения, и характеристики 104 транспортного средства. Характеристики 104 транспортного средства представляют динамические параметры транспортного средства. Блок 136 выявления выполнен с возможностью учета инверсной динамики транспортного средства. Исходными данными блока 136 выявления является, по меньшей мере, регулирующая величина 137, которая представляет собой, например, команду (последовательность) δH,dem(tk,l) параметров рулевого управления.
Другими словами, первый компонент 331 устройства с целью формирования заданной траектории из заданного коридора движения учитывает в качестве характеристик 104 транспортного средства, например, информацию о размерах транспортного средства (ширину транспортного средства), возможную траекторию транспортного средства, описываемую задними колесами тягача и колесами прицепа при движении передних управляемых колес по кругу, позицию седла (Kingpin) (палец прицепного механизма), размеры полуприцепа, конфигурации осей, оцененное системой ESP расстояние между осями колесных пар, максимальное поперечное ускорение (положение центра тяжести, предел по условиям опрокидывания), которые определены системой ESP, и т.п. В последующем с учетом, например, характеристик рулевого управления транспортного средства для прохождения траектории рассчитывают заданный параметр рулевого управления. Характеристики рулевого управления могут быть выведены, например, из содержащейся в системе ESP адаптированной эталонной модели.
Второй компонент устройства управления расширяет электронную систему управления тормозной системой до функций рулевого управления функциональности “fail operational”: а именно добавлением регулирования динамики транспортного средства (системы ABS, ASR и ESP), включая вмешательство в рулевое управление, координацию вмешательства в рулевое управления через исполнительный механизм рулевого управления или торможение путем руления (Steep-by-brake), управление исполнительными механизмами или исполнительными органами, в частности, исполнительным механизмом рулевого управления, внедрения концепции “fail operational” среди прочего для функции Steep-by-brake, оценки состояния транспортного средства, базирующейся на датчиках тормозной системы, расчета специфических в отношении движения величин и предельных значений для планировщика режима работы, например, максимально возможного замедления, поздней точки старта маневра уклонения и т.п., управления замедлением применительно к управлению ветви привода и т.п.
Со ссылкой на названные выше фигуры можно назвать следующие примерные задачи устройства 130 управления. Устройство 130 управления выполнено с возможностью формирования регулирующих величин для ветви привода, тормозной системы, рулевого управления из заданной траектории, а также профиля скорости, а также для определения состояния движения транспортного средства, стабилизации транспортного средства, например, с помощью антиблокировочной системы, устройства регулирования проскальзывания ведущих колес и электронного пакета (ABS, ASR, ESP) стабилизации и/или для реализации регулирования тормозной системы.
Если пример исполнения содержит сопряжение «и/или» между первым признаком и вторым признаком, то это следует понимать в смысле, что пример осуществления в соответствии с формой реализации содержит как первый признак, так и второй признак и в соответствии со следующей формой реализации содержит либо только первый признак, либо только второй признак.
Перечень ссылочных обозначений

Группа изобретений относится к области машиностроения, в частности к способам управления движением транспортного средства. Способ управления движением транспортного средства содержит следующие этапы. Считывание предварительно заданных данных из интерфейса с устройством формирования данных. Определение управляющих данных для транспортного средства. Выявление одной регулирующей величины для исполнительного органа с использованием управляющих данных. Выведение регулирующей величины на интерфейс. Устройство для осуществления этапов способа. Система управления движением транспортного средства. Транспортное средство содержит устройство предоставления данных, исполнительный орган, устройство формирования данных и устройство для осуществления способа управления движением транспортного средства, соединенное с возможностью передачи сигналов с устройством формирования данных. Достигается улучшение управления транспортным средством. 3 н. и 7 з.п. ф-лы, 8 ил.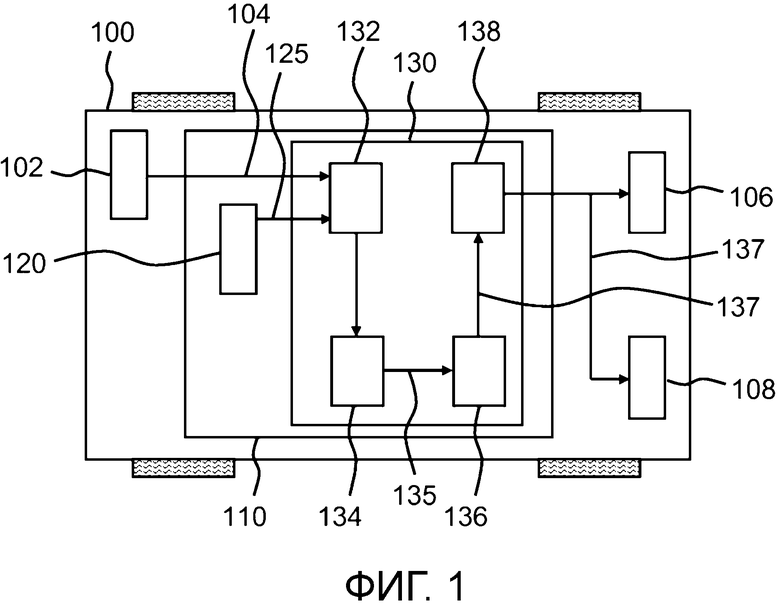
1. Способ (200) управления движением транспортного средства (100), причем транспортное средство (100) содержит систему (110) управления движением транспортного средства, которая содержит по меньшей мере одно устройство (120) формирования данных для формирования предварительно заданных данных (125) для движения транспортного средства (100), по меньшей мере одно устройство (102) предоставления данных для предоставления по меньшей мере одной характеристики (104) транспортного средства (100) и по меньшей мере один исполнительный орган (106, 108) для оказания влияния на движение транспортного средства (100), характеризующийся тем, что содержит по меньшей мере следующие этапы, на которых:
- считывают (210) предварительно заданные данные (125) из интерфейса с устройством (120) формирования данных, причем предварительно заданные данные (125) представляют коридор (407) движения и/или профиль скорости для транспортного средства (100) для одного участка пути, и считывают указанную по меньшей мере одну характеристику (104) транспортного средства из интерфейса с по меньшей мере одним устройством (102) предоставления данных, при этом указанная по меньшей мере одна характеристика (104) транспортного средства представляет позицию точки седла между тягачом и полуприцепом или прицепом, конфигурацию осей, допустимое поперечное ускорение, положение центра тяжести и/или предел по условиям опрокидывания;
- определяют (220) управляющие данные (135) для транспортного средства (100) с использованием указанных предварительно заданных данных (125) и указанной по меньшей мере одной характеристики (104) транспортного средства, причем управляющие данные (135) предназначены для управления движением транспортного средства (100) с соблюдением предварительно заданных данных (125);
- выявляют (230) по меньшей мере одну регулирующую величину (137) для указанного по меньшей мере одного исполнительного органа (106, 108) с использованием управляющих данных (135); и
- выводят (240) указанную по меньшей мере одну регулирующую величину (137) на интерфейс с указанным по меньшей мере одним исполнительным органом (106, 108).
2. Способ (200) по п. 1, отличающийся тем, что на этапе (220) определения в качестве управляющих данных (135) для транспортного средства (100) определяют заданную траекторию (409) и/или заданный профиль скорости для транспортного средства (100) с использованием указанных предварительно заданных данных (125) и указанной по меньшей мере одной характеристики (104) транспортного средства.
3. Способ (200) по п. 1 или 2, отличающийся тем, что на этапе (230) выявления в качестве указанной по меньшей мере одной регулирующей величины (137) определяют параметр рулевого управления для исполнительного механизма (106) рулевого управления и/или величину ускорения для приводной системы (108) и/или тормозной системы (108) транспортного средства (100).
4. Способ (200) по любому из пп. 1-3, отличающийся тем, что
- на этапе (210) считывания осуществляют считывание дополнительных предварительно заданных данных из интерфейса с по меньшей мере одним устройством-ассистентом водителя, датчиком данных движения и/или датчиком окружающей среды транспортного средства (100), и
- на этапе (220) определения управляющие данные (135) определяют с использованием указанных дополнительных предварительно заданных данных.
5. Способ (200) по любому из пп. 1-4, отличающийся тем, что содержит этап выполнения проверки системы (110) управления движением транспортного средства и/или тормозной системы транспортного средства (100) на предмет выявления ошибки, причем
на этапе (220) определения определяют управляющие данные (135) в зависимости от результата проверки, проведенной на указанном этапе выполнения проверки, причем управляющие данные предназначены для управления движением транспортного средства (100), чтобы обеспечить остановку транспортного средства (100) с учетом обстановки вокруг транспортного средства.
6. Способ (200) по любому из пп. 1-5, отличающийся тем, что содержит
этап выявления данных (339) о состоянии движения транспортного средства (100) с использованием сигнала датчика от по меньшей мере одного датчика транспортного средства, причем данные (339) о состоянии движения представляют специфические в отношении транспортного средства величины и предельные значения при движении; и
этап передачи выявленных данных (339) о состоянии движения на интерфейс с по меньшей мере одним устройством (350) системы (110) управления движением транспортного средства.
7. Способ (200) по любому из пп. 1-6, отличающийся тем, что
на этапе (210) считывания в качестве предварительно заданных данных (125) из интерфейса с по меньшей мере одним устройством-ассистентом водителя транспортного средства (100) считывают по меньшей мере одно заданное значение параметра рулевого управления,
на этапе (220) определения управляющие данные (135) определяют с использованием по меньшей мере одного заданного значения параметра рулевого управления, и
на этапе (230) выявления с использованием указанных управляющих данных (135) определяют комбинированный параметр рулевого управления в качестве указанной по меньшей мере одной регулирующей величины (137).
8. Способ (200) по любому из пп. 1-7, отличающийся тем, что на этапе (210) считывания в качестве указанной по меньшей мере одной характеристики (104) транспортного средства считывают по меньшей мере одну статическую характеристику транспортного средства (100) и/или по меньшей мере одну динамическую характеристику транспортного средства (100), причем по меньшей мере одна характеристика (104) транспортного средства представляет собой информацию от по меньшей мере одного датчика транспортного средства, размер транспортного средства (100), траекторию транспортного средства (100), описываемую задними колесами тягача или колесами прицепа при движении передних управляющих колес по кругу, в случае транспортного средства, состоящего из нескольких частей с тягачом и полуприцепом или прицепом, размер прицепа или полуприцепа транспортного средства (100), расстояние между осями колесных пар и/или характеристики рулевого управления.
9. Устройство (130) для осуществления этапов способа (200) по любому из пп. 1-8 в соответствующих блоках.
10. Система (110) управления движением транспортного средства (100), причем транспортное средство (100) содержит по меньшей мере одно устройство (102) предоставления данных для предоставления по меньшей мере одной характеристики (104) транспортного средства (100) и по меньшей мере один исполнительный орган (106, 108) для оказания влияния на движение транспортного средства (100), отличающаяся тем, что содержит, по меньшей мере:
устройство (120) формирования данных для формирования предварительно заданных данных (125) для движения транспортного средства (100), и
устройство (130) по п. 9, причем указанное устройство (130) соединено с возможностью передачи сигналов по меньшей мере с устройством (120) формирования данных.
| DE 102015003124 A1, 15.09.2016 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| DE 102010025612 A1, 10.03.2011 | |||
| СПОСОБ ОБЕСПЕЧЕНИЯ АКТИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНЫХ СРЕДСТВ ПРИ ДВИЖЕНИИ В КОЛОННЕ | 2007 |
|
RU2388057C2 |

