Изобретение относится к области конструирования малоразмерных и индивидуальных плавательных средств и может быть использовано для повышения их устойчивости.
Известно использование балансирующих грузов для уменьшения качки судов (см. Пат. США 2012167812 (А1) - 2012-07-05, В63В 43/08 или патент Франции FR 2953484 (А1) - 2011-06-10, В63В 29/00).
Данные системы весьма громоздки и сложны, они практически неприменимы для лодок, каяков, досок и т.п.
В патенте Франции FR 2940781 (А1) - 2010-07-09, В63В 41/00 описана система успокоения качки судна за счет гибкой связи между корпусом и килем судна.
Данному устройству, по существу, свойственны те же недостатки, кроме того, оно не может быть использовано на плоскодонных судах без киля, надувных лодках и т.п.
В патенте США 5474012 (А) - 1995-12-12, В63В 39/00 описана система компенсации кренов судна, содержащая блок управления, трансмиссию и две плоскости, размещенные по обе стороны от движителя.
Однако данная система недостаточно эффективна для компенсации качки, а кроме того может использоваться лишь «на ходу».
В заявке 2008116649/11, 25.04.2008 описан штормовой успокоитель килевой и бортовой качки, который имеет два управляемых крыла или две поворотные насадки на гребных винтах, установленных на горизонтальных или наклонных баллерах в кормовой части корпуса корабля под прямым воздействием потока жидкости от работающих гребных винтов. Поворотные баллеры крыльев допускают упругий люфт не менее чем до углов ±30°, обеспечиваемый пружинным (или электромагнитным) устройством с восстанавливающим моментом, пропорциональным отклонению крыла от нейтрального нулевого или заданного аппаратурой управления угла.
Описанная система работает в штормовых условиях и в сочетании с мощными гребными винтами, поэтому ее эффективность невелика для маломерных судов, скимбордов и на относительно спокойной воде.
В заявке 93013191/11, 12.03.1993 описана система успокоения бортовой качки, содержащая воздушный винт изменяемого шага, поднятый выше палубных надстроек на высоту на специальной мачте, где также располагается электрический двигатель, приводящий винт во вращение, причем лопасти винта лежат в меридиональной плоскости судна. Для автоматического регулирования используется гироскоп, расположенный в метацентре судна, ось вращения гироскопа ориентируется вертикально.
Однако воздушный винт имеет большие габариты, создает риски для спортсмена.
В патенте Японии JPH 04133893, В63В 1/28 описано применение надувных полостей, выполненных с соответствующими приводами, которые обеспечивают перемещение полостей вдоль борта судна.
Изменение положения полостей позволяет плавно изменять плавучесть и характеристики подавления качки, однако недостаточно быстро для того, чтобы успокаивать последнюю.
В заявке WO 2006022847, В63В 39/04 описан гидрогиростабилизатор в виде полости, установленной на плавательном средстве, в которой с помощью водомета организовано вращательное движение жидкости.
Недостатком известного устройства является ограничение области применения, обусловленное формой и размерами полости. В частности, такую систему невозможно применить для плоских плавательных средств, серфров и скимбордов.
Наиболее близкой к предложенной является система стабилизации плавательного средства, содержащая Г-образные штанги с приводами, закрепленные на корпусе плавательного средства и осуществляющими перемещение закрепленных на штангах поплавков (см. US 5787832 (А) - 1998-08-04, В63В 43/14).
Однако данная система характеризуется недостаточной эффективностью и быстродействием для полного погашения колебаний малоразмерного плавательного средства, известная система не является, по существу, активной и средства перемещения поплавков не выполнены с возможностью отработки волнения, скорее лишь с возможностью изменения плавучести и крена.
Техническим результатом, ожидаемым от использования изобретения, является повышение эффективности и быстродействия системы стабилизации плавательного средства за счет выполнения ее активной и применимой для малоразмерных плавательных средств.
Указанный результат достигается тем, что в известной системе активной стабилизации малоразмерного плавательного средства, содержащей по меньшей мере одну штангу с движителем, закрепленную на корпусе плавательного средства, штанга выполнена и размещена с возможностью выноса движителя в направлении, перпендикулярном оси крена или качки, а движитель выполнен с возможностью создания вертикальной тяги в противофазе вектору крена или качки.
Кроме того, система может быть снабжена контроллером, вход и выход которого соединены с датчиком углового положения плавательного средства и управляющим входом движителя (движителей) соответственно.
При этом контроллер может быть выполнен с дополнительными информационными входами, подключенными к датчикам положения центра тяжести плавательного средства и/или производных углового положения последнего и внешних условий.
Для целого ряда индивидуальных плавсредств - от каяков и каноэ до плавательных досок SUP и серфов желательно увеличение поперечной устойчивости и снижение опасности бокового опрокидывания.
Задача решается размещением на корпусе одной, двух или более штанг или вынесенных опор с закрепленным движителем. При этом штанга должна иметь ненулевую проекцию на направление, перпендикулярное мгновенной оси качки, а движитель создавать тягу, направленную, по меньшей мере, частично, вниз, если штанг две и более, или вверх и вниз, если штанга одна.
Помимо штанг с движителями система состоит из электронного блока управления и питающего аккумулятора, либо другого источника энергии и управляется по критерию отклонения оси плавательного средства от вертикали по информации соответствующих датчиков, что и обеспечивает тягу в противофазе качке.
Оптимальным является выполнение системы с возможностью управления от контроллера не только положением штанг в плоскости, параллельной поверхности плавательного средства или поверхности воды, если оно стабилизировано, но и направлением тяги, создаваемой движителем (движителями).
Таким образом, конструкция представляет собой вынесенную в сторону от плавательного средства (вбок, вперед, назад) штангу, на которой закреплен на нужном заглублении под поверхностью воды движитель, обязательно имеющий вертикальную составляющую тяги, чем обеспечивается компенсация поворотного момента (крена) плавсредства в данной плоскости и направлении. При этом движитель выполняется с реверсом тяги. Также движителей на одной штанге может быть несколько.
Важно подчеркнуть, что понятие "штанга" в предложенном решении носит весьма общий характер: это может быть не только кронштейн, тяга, перекладина, но и любой элемент конструкции, в том числе и часть корпуса плавательного средства, например прилив на корпусе, то есть вышеописанное существо предложения включает и такой вариант реализации, в котором движитель (движители) закреплен непосредственно на нижней поверхности корпуса плавательного средства, слева, справа или по обе стороны от продольной оси корпуса на некотором расстоянии от нее. Именно в этом смысле выше сказано, что штанга выполнена и размещена с возможностью выноса движителя.
Если движители расположены по обе стороны от указанной оси, то есть их более одного, они могут выполняться с возможностью создания тягового усилия, направленного только вниз. Если же используется один движитель, его располагают ниже поверхности воды и выполняют с возможностью создания тяги как вниз, так и вверх.
В общем случае, может использоваться не одна, а несколько штанг с "активными поплавками" (движителями) из соображений симметрии, удобства и т.п. Основным моментом является именно стабилизация плавательного средства электронным блоком управления (контроллером) относительно вертикальной или любой другой выбранной оси вне зависимости от волнения на поверхности воды или динамического перемещения центра тяжести (нагрузки) самого малоразмерного плавательного средства.
Хотя реализация системы с управлением от контроллера является предпочтительной, она не является единственно возможной. Так, управление может осуществляться от джойстика или путем преобразования давления ног спортсмена в управляющее усилие.
Необходимо подчеркнуть также отличие поведения предлагаемой системы на волне по отношению к традиционной лодке с балансировочным поплавком, когда усилие от последнего пропорционально погружению, и при определенном пространственном шаге волны крен максимален, а поплавок попадает в проем волны и качка не компенсируется. В нашем случае достигается именно стабилизация, в том числе на волнах, и малое плавательное средство ведет себя существенно стабильнее.
При обработке данных о величине крена с выхода датчика углового положения в контроллере дополнительно могут учитываться производные этого сигнала, данные о скорости ветра, течения и проч. Учет дополнительных данных позволяет повысить быстродействие системы и в конечном итоге эффективность стабилизации.
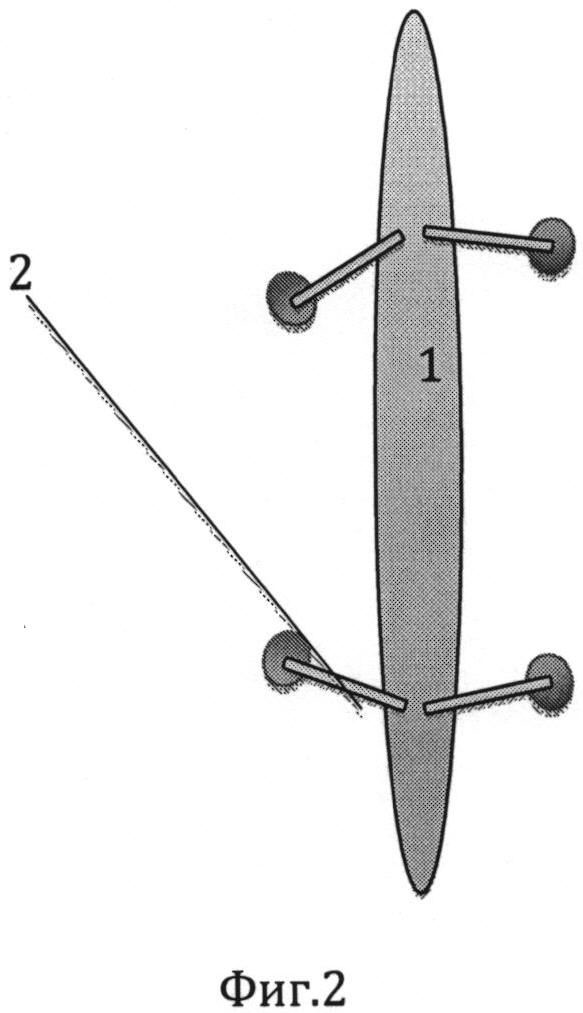
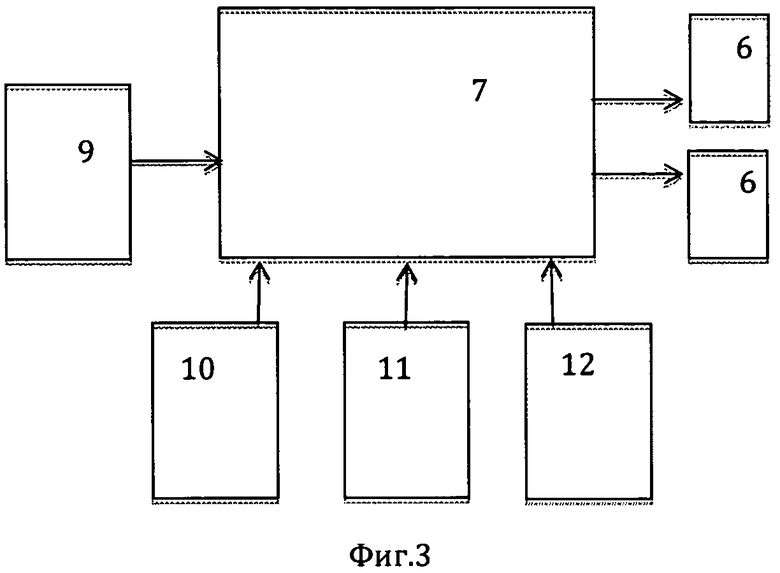
На фиг. 1, 2 показаны некоторые варианты выполнения системы. На фиг. 3 - схема подключения контроллера.
На фиг. 1-3 обозначено:
1 - плавательное средство,
2 - штанга (Г-образная),
3 - ось,
4 - поворотный механизм,
5 - шарнирный механизм,
6 - движитель (электродвигатель с гребным винтом, водометный движитель, пневмокомпрессор или даже реактивный движитель и т.п., причем в первых двух случаях движитель должен находиться ниже поверхности воды, а в последних может размещаться и над поверхностью воды),
7 - контроллер,
8 - пульт управления,
9 - датчик углового положения плавательного средства 1,
10, 11, 12 - соответственно датчики положения центра тяжести, угловой скорости (и/или ускорения) и ветра.
Стрелками на фиг. 1 показаны векторы сил и направления перемещения элементов конструкции, пунктиром - положение, которое может занимать Г-образная штанга 2.
В простейшем случае система может быть образована одной неподвижной Г-образной штангой 2, на конце которой также неподвижно закреплен движитель 6, выполненный с возможностью создания тягового усилия, направленного как вверх, так и вниз. При этом создается момент, компенсирующий крены плавательного средства 1. Достигается это тем, что величину момента определяет контроллер 7 по величине и скорости изменения углового положения плавательного средства 1 (в алгоритме могут использоваться также данные о положении центра тяжести, более высокие производные и т.п.). Выходной сигнал контроллера 7 управляет тягой движителя 6, причем если в примере, изображенном на фиг. 1, плавательное средство 1 наклонено волной или спортсменом, перенесшим центр тяжести, на правый борт, движитель 6, расположенный справа, должен обеспечить тягу вниз до момента полной компенсации крена, то есть в противофазе вектору качки. И наоборот, если плавательное средство 1 наклонено на левый борт, движитель 6 создает тягу вверх.
В другом варианте тяга 2 может быть выполнена подвижной, с поворотным механизмом 4, который управляется контроллером 7. При этом крен на левый борт может компенсироваться не изменением направления тяги снизу вверх, а переводом штанги 2 в положение 2′.
Также система может содержать две неподвижные относительно плавательного средства 1 штанги 2, расположенные перпендикулярно продольной оси плавательного средства (фиг. 1, штанги 2 и 2′).
Как показано на фиг. 2, система может содержать не одну или две, а, например, четыре штанги 2, положение которых также регулируется контроллером 7.
На фиг. 1 показано также, что возможно подвижное закрепление движителей (движителей 6). Движители 6, закрепленные на концах боковых штанг 2, всегда находятся под водой и имеют два основных положения (это не значит, что нет промежуточных между ними):
- сопла (винты) направлены вниз и при этом автоматически включается режим стабилизации, когда тяга (обороты) каждого движителя регулируется встроенным контроллером 7 из расчета коэффициента стабилизации (максимально возможной стабилизации или частичной - с разрешенными допусками по углу отклонения от вертикальной оси плавательного средства 1 в покое). При этом не важно, что является причиной нестабильности - боковая качка на волне или перемещение пассажиров или грузов, смещающих центр тяжести, так что такой режим особенно полезен при посадке или высадке;
- сопла (винты) направлены назад для обеспечения движения вперед. При этом управление тягой и ее перераспределением между движителями может осуществляться как вручную, джойстиком, так и автоматически, контроллером 7, например, для осуществления прямолинейного движения с компенсацией бокового сноса и т.п.
- возможно третье положение движителей - соплами вперед, например, для осуществления торможения в воде. Если управление положением осуществляется раздельно по правой и левой стороне, это позволяет получить дополнительные возможности при маневрировании.
В случае применения предлагаемой системы для досок наиболее простой реализацией может быть поперечная штанга 2 с изгибами на концах и закрепленными на них движителями 6 (двигателями и винтами, например). При этом управление их положением может осуществляться как педалью с поворотным механизмом, так и непосредственно поворотом ногой, например барабана с рифленой резиновой поверхностью, связанного с осью штанги 2. При этом должна сохраняться логичность управления (предполагаем, например, что верхняя треть прорезиненного рифленого барабана возвышается над «палубой» и доступна для контакта со стопой спортсмена): вращая барабан от себя до упора вперед, получаем заднее расположение сопел и движение вперед; поворачивая барабан назад на себя в среднем положении, получаем режим стабилизации, а при дальнейшем повороте назад соответственно торможение или движение тоже назад.
Целесообразно, чтобы в режим стабилизации (улучшения поперечной устойчивости), как наиболее безопасный, система переходила либо всегда по умолчанию (педаль отпустили) или по упрощенному сигналу опасности (спортсмен увидел боковую волну заранее и имеет возможность моментальным простым действием перейти к такому режиму). Кроме этого, может быть предусмотрен автоматический переход в такой режим при возникновении крена или производной поворотного движения вокруг продольной оси выше разрешенных.
Если используется вариант с симметричными движителями 6, то простейшей реализацией совместного крепления двух движителей в случае всевозможных плавательных досок и каяков может быть П-образная поперечная штанга 2, на концах которой на Г-образных кронштейнах закреплены движители 6. Размеры всех частей выбираются из следующих простых соображений: горизонтальное расположение П-образной конструкции, например, соответствует горизонтальному же расположению движителей 6 винтами (соплами) назад, при этом Г-образное крепление обеспечивает их необходимые заглубления относительно поверхности воды; вертикальное положение П-образной конструкции (результат ее поворота на 90 градусов) соответствует тогда вертикальному положению движителей, используемому в режиме стабилизации, причем размер боковых частей П-образной конструкции выбирается из расчета максимального крена и максимальной высоты волны, несмотря на которые движитель должен находиться под водой. Поворотный механизм 4 и/или шарнирный механизм 5, как и крепление верхней части П-образной конструкции, должны обеспечивать как два крайних, так и промежуточные положения ее боковых частей по углу поворота относительно оси 3 и верхней части конструкции. Разумеется, возможны другие, в том числе разделенные для левой и правой части и более сложные конструкции.
Использование движителей 6 (или струй от них) в режиме стабилизации в положении "не вертикально, а под углом", а также различные режимы контроллера 7 по управлению тягой (оборотами), включая перераспределение тяги между движителями, дает множество возможностей по управлению плавательным средством. В качестве примера упомянем два режима:
- смещение центра тяжести и боковой крен, создаваемый перемещением корпуса спортсмена при соответствующем управлении тягой, могжет создавать эффект гребли.
- используя одно весло, соответствующим режимом управления тяги можно добиться полной компенсации как крена, так и поворота, при этом не перекладывая весло на другой борт.
С этой целью на вход контроллера 7 может подаваться дополнительная информация: о положении центра тяжести спортсмена в плоскости "палубы", например от датчиков давления, вмонтированных в "палубу" или в размещенный на ней специальный коврик, а также от датчиков, сообщающих о силе течения, волнения, ветра и т.п. Контроллер 7 может иметь также различные режимы работы, задаваемые с пульта 8. Отличие режимов может заключаться в величине коэффициента передачи в канале управления, величине задержки в этом канале и т.д. Важным моментом также является возможность временного соединения нескольких плавательных средств (например, досок SUP) посредством тех же штанг 2 или других механических креплений в единое коллективное плавательное средство с режимом согласованной стабилизации, исключающим в том числе возникновение колебательности в такой системе.
Система активной стабилизации открывает более широкие возможности для двигательной активности спортсмена. Применение устройства не исключает, как описано выше, использования мускульной энергии для подзарядки аккумуляторов, привода движителей при гребле, а также в виде педалей, беговой дорожки, дуги или мачты в качестве рычага для усилия рук и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВАТЕЛЬНОЕ СРЕДСТВО С ИНФОРМАЦИОННЫМ ДИСПЛЕЕМ | 2015 |
|
RU2594456C1 |
| АКТИВНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ДВИЖЕНИЯ ПО ВОДЕ В ВИДЕ КИЛЯ И ЕГО ВАРИАНТЫ | 2014 |
|
RU2570924C1 |
| ТРЕНАЖЕР ДЛЯ РАЗВИТИЯ НАВЫКОВ УДЕРЖАНИЯ РАВНОВЕСИЯ И СРЕДСТВО, ОБЛЕГЧАЮЩЕЕ УДЕРЖАНИЕ РАВНОВЕСИЯ | 2015 |
|
RU2584663C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| САМОСТАБИЛИЗИРУЮЩИЙСЯ АНТЕННЫЙ ПОСТ СУДОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1997 |
|
RU2125755C1 |
| Плавательное средство сборно-разборного типа | 2015 |
|
RU2613668C2 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| АНТЕННОЕ УСТРОЙСТВО | 1995 |
|
RU2173921C2 |
| Самостабилизирующийся лопастной движитель | 2022 |
|
RU2798298C1 |
Изобретение относится к области конструирования малоразмерных и индивидуальных плавательных средств. Система активной стабилизации малоразмерного плавательного средства содержит по меньшей мере одну штангу с движителем, которая закреплена на корпусе плавательного средства. Штанга выполнена и размещена с возможностью выноса движителя в направлении, перпендикулярном оси крена или качки. Движитель выполнен с возможностью создания вертикальной тяги в противофазе вектору крена или качки. Достигается повышение эффективности и быстродействие системы стабилизации плавательного средства. 2 з.п. ф-лы, 3 ил.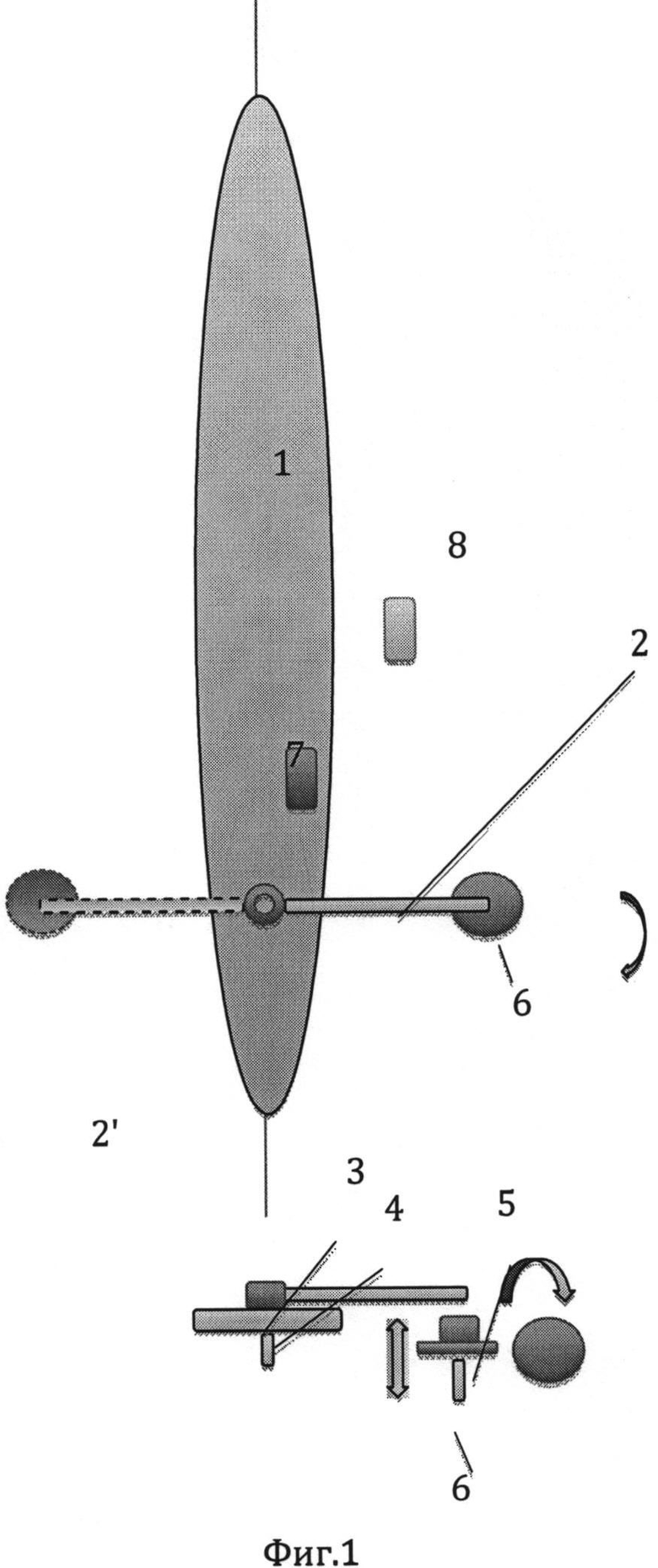
1. Система активной стабилизации малоразмерного плавательного средства, содержащая по меньшей мере одну штангу с движителем, закрепленную на корпусе плавательного средства, отличающаяся тем, что штанга выполнена и размещена с возможностью выноса движителя в направлении, перпендикулярном оси крена или качки, а движитель выполнен с возможностью создания вертикальной тяги в противофазе вектору крена или качки.
2. Система по п.1, отличающаяся тем, что она снабжена контроллером, вход и выход которого соединены с датчиком углового положения плавательного средства и управляющим входом движителя (движителей) соответственно.
3. Система по п.1, отличающаяся тем, что контроллер выполнен с дополнительными информационными входами, подключенными к датчикам положения центра тяжести плавательного средства и/или производных углового положения последнего и внешних условий.
| Способ получения лака для защиты металлов от коррозии | 1947 |
|
SU72456A1 |
| US 5787832 A, 04.08.1998 | |||
| РОТОРНЫЙ ДВИЖИТЕЛЬ | 2007 |
|
RU2359862C2 |

