Изобретение относится к машиностроению и может быть использовано в различных механизмах и машинах, в частности в шариковых подшипниках качения.
Известны конструкции шариковых подшипников, имеющих одну пару колец и расположенные между ними шарики, при этом профиль дорожек качения колец выполнен с переменным радиусом кривизны [1-4].
Недостатком данных подшипников является то, что они сложны в изготовлении и имеют начальный одноточечный контакт между шариками и дорожками качения, что вызывает большие контактные напряжения.
Наиболее близким по технической сущности к заявляемому изобретению является конструкция шарикового подшипника, состоящая из колец, на дорожках качения которых выполнены канавки, и расположенных между ними шариков [5]. Беговая дорожка одной из обойм выполнена волнистой с гребнями и впадинами, равномерно отстоящими друг от друга вдоль дорожки и симметрично расположенными относительно плоскости симметрии обоймы, перпендикулярной ее оси, а беговая дорожка другой обоймы выполнена в виде отдельных канавок, которые равноудалены одна от другой, каждая из которых расположена под углом к оси обоймы и количество которых равно количеству шариков.
Недостатком данной конструкции являются высокие контактные напряжения и, как следствие, пониженная работоспособность, так как начальный контакт меду телами и дорожками качения является точечным. Кроме того, подшипник обладает пониженной работоспособностью из-за наличия волнистости поверхности дорожек качения, что приводит к вибрации подшипника.
Задачей изобретения является устранение указанных недостатков, а именно обеспечение рациональной геометрии контакта в подшипнике, и, как следствие, снижение контактных напряжений и повышение работоспособности подшипника.
Техническим результатом является снижение нагрузки на шарики и повышение работоспособности подшипника.
Поставленная задача решается тем, что в известной конструкции шарикового подшипника, состоящей из колец, на дорожках качения которых выполнены канавки, и расположенных между ними шариков, согласно предлагаемому техническому решению канавки расположены вдоль окружности контакта шариков и дорожек качения, имеют круговой профиль с радиусом, равным радиусу шариков, а ширина канавок равна b=(0,1-0,4)·dS, где dS - диаметр шариков.
При наличии локальных дорожек качения в виде канавок кругового профиля, совпадающего с профилем шариков, начальный контакт между шариками и дорожками качения получается линейным, что резко снижает величину контактных напряжений и повышает работоспособность подшипника. У быстроходных подшипников важным фактором, помимо величины контактных напряжений, является ширина контакта тел и дорожек качения, так как ее увеличение вызывает повышенные трение и тепловыделение. Поэтому у быстроходных подшипников ширина канавки имеет минимальное из указанных значений. У тихоходных подшипников наиболее важным параметром является допустимая величина контактных напряжений. Поэтому для таких подшипников ширина канавки должна иметь максимальное из указанных значений.
Сущность изобретения поясняется чертежом, на котором представлена конструкция упорно-радиального подшипника качения.
Упорно-радиальный подшипник состоит из пары противоположно расположенных колец 1 и 2, имеющих дисковую форму, и расположенных между ними шариков 3. Дорожки качения имеют круговую форму профиля с радиусами rg1 и rg2. Диаметры дорожек качения D1 и D2 проходят через центры радиусов профиля и имеют у кольца 1 и кольца 2 разную величину: D1≠D2. Поэтому контакт шариков с дорожками качения колец осуществляется под углом β.
На дорожке качения каждого из колец 1 и 2 круговой формы в месте их контакта с шариками 3 выполнена локальная дорожка качения в виде круговой канавки шириной b и c радиусом профиля rl=0,5·dS, где dS - диаметры шариков. Ширина канавки b устанавливается в зависимости от условий работы подшипника и изменяется в пределах: b=(0,1-0,4)·dS. Наличие локальных дорожек качения уменьшает величину контактных напряжений, повышает нагрузочную способность подшипника.
Пример. Определим эффективность предложенной конструкции на примере упорно-радиального подшипника, устанавливаемого в верхнюю опору передней стойки автомобилей ВАЗ марки «Калина» и «Приора». Условия работы подшипника: с учетом действия динамических нагрузок максимальная осевая нагрузка составляет Pod=9950H, максимальная радиальная нагрузка Prd=1254H. Допустимая максимальная нагрузка на шарики psmax=526H.
Из конструктивных соображений выбираем номинальный диаметр дорожки качения D=76,7 мм, а диаметр шарика равным ds=5 мм. Радиусы желобов колец подшипника обычно назначают в соответствии с диаметром шариков: rg=(0,52-0,53)·ds. Тогда радиус желоба: rgmin=0,52·ds=2,6 мм; rgmax=0,53·ds=2,65 мм. Следовательно, rgo=0,525·ds=2,625 мм. Количество шариков равно z=44. Угол контакта тел и дорожек качения β=54°.
Рассматриваемый подшипник относится к тихоходным подшипникам, так как работает при качательном движении. Поэтому ширину локальной дорожки качения принимаем равной b=0,4·dS=2 мм.
В существующей конструкции подшипника размер площадки контакта меду телами и дорожками качения определяется равенством [6]:

а величина контактных напряжений

где


коэффициенты µ=3,94 и η=0,406 определяются по методике [6] в зависимости от соотношения радиусов профилей тел и дорожек качения.
Тогда по формулам (1) и (2) получаем:
В предлагаемой конструкции подшипника начальный контакт шариков с локальными дорожками качения является линейным. Для линейного контакта величина контактных напряжений равна [6]:

Таким образом, при тех же размерах площадки контакта контактные напряжения в подшипнике предлагаемой конструкции получаются на 23% меньше, чем в обычном подшипнике. Это дает возможность при тех же контактных напряжениях повысить нагрузку на шарики. Из равенства (4) определим максимально допустимую нагрузку на шарики при контактных напряжениях, равных контактным напряжениям обычного подшипника:

Допустимая нагрузка на шарики возрастает в 1,5 раза. Соответственно, допустимая внешняя нагрузка на подшипник A и R также возрастает в 1,5 раза, что является очень существенным.
Для быстроходных подшипников большое влияние на сопротивление качению, а следовательно, предельную быстроходность оказывает величина контактных напряжений. Так, если бы указанный выше подшипник работал при повышенной частоте вращения, но при нагрузке на шарики в 10 раз меньшей: psmax=50 H, то по формулам (1) и (2):
Изготовив локальную дорожку качения шириной 0,98 мм, величина контактных напряжений в подшипнике предлагаемой конструкции составила бы:

т.е. величину в 1,23 раза меньшую, чем в обычном подшипнике. По данным Пинегина С.В. [7] снижение величины контактных напряжений в 1,25 раза приводит к уменьшению сопротивления качения в 4-5 раз. Таким образом, у подшипников предлагаемой конструкции увеличивается быстроходность, уменьшается тепловыделение.
Технико-экономическая эффективность предлагаемой конструкции подшипника заключается в следующем.
1. Снижается нагрузка на шарики и повышается работоспособность подшипника.
2. Упрощается производство подшипников.
Источники информации
1. А.с. SU №1141237, МПК: F16C 19/06.
2. А.с. SU №320655, МПК: F16C 19/06.
3. А.с. SU №894237, МПК: F16D 3/04.
4. Патент RU №2073135, МПК: F16C 19/44, F16C 33/58.
5. Патент RU №2018734, МПК: F16C 19/06.
6. Спришевский А.И. Подшипники качения. М., «Машиностроение», 1968, 432 с. (стр. 43-58).
7. Пинегин С.В. Контактная прочность и сопротивление качению. М.: «Машиностроение». 1969. 236 с. (стр. 94-105).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ ПАРАМЕТРОВ ШАРИКОПОДШИПНИКА | 2014 |
|
RU2581414C1 |
| ШАРИКОВЫЙ УПОРНО-РАДИАЛЬНЫЙ ПОДШИПНИК | 2011 |
|
RU2481501C1 |
| СПОСОБ УПРОЧНЕНИЯ ДОРОЖЕК КАЧЕНИЯ ШАРИКОПОДШИПНИКА | 2016 |
|
RU2628741C1 |
| Роликовый подшипник | 2015 |
|
RU2613549C1 |
| Шариковый подшипник | 2022 |
|
RU2778579C1 |
| Способ комплектования шарикоподшипников | 2016 |
|
RU2626800C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КОНТАКТА В ШАРИКОВОМ ПОДШИПНИКЕ | 2016 |
|
RU2628736C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПАРАМЕТРОВ КОЛЕЦ ШАРИКОПОДШИПНИКОВ | 2014 |
|
RU2583510C2 |
| УПОРНО-РАДИАЛЬНЫЙ ПОДШИПНИК КАЧЕНИЯ | 2014 |
|
RU2570516C1 |
| СПОСОБ ПОВЫШЕНИЯ МАСЛОЕМКОСТИ ШАРИКОПОДШИПНИКА | 2012 |
|
RU2495287C1 |
Изобретение относится к машиностроению и может быть использовано в различных механизмах и машинах, в частности в шариковых подшипниках качения. Шариковый подшипник состоит из колец, на дорожках качения которых выполнены канавки, и расположенных между ними шариков. Канавки расположены вдоль окружности контакта шариков и дорожек качения, имеют круговой профиль с радиусом, равным радиусу шариков, а ширина канавок равна b=(0,1-0,4)·dS, где dS - диаметр шариков. Технический результат: обеспечение рациональной геометрии контакта в подшипнике и, как следствие, снижение нагрузок на шарики и повышение работоспособности подшипника. 1 ил., 1пр.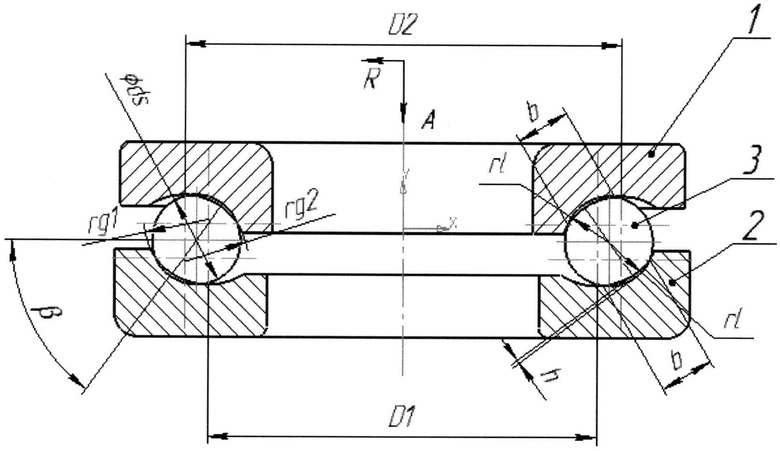
Шариковый подшипник, состоящий из колец, на дорожках качения которых выполнены канавки, и расположенных между ними шариков, отличающийся тем, что канавки расположены вдоль окружности контакта шариков и дорожек качения, имеют круговой профиль с радиусом, равным радиусу шариков, а ширина канавок равна b=(0,1-0,4)·dS, где dS - диаметр шариков.
| БЕССЕПАРАТОРНЫЙ ШАРИКОВЫЙ ПОДШИПНИК | 1991 |
|
RU2018734C1 |
| ШАРИКОПОДШИПНИК РАДИАЛЬНЫЙ | 2012 |
|
RU2518384C2 |
| Шариковый радиальный многоконтактный подшипник качения | 1989 |
|
SU1831599A3 |
| Шарикоподшипник | 1967 |
|
SU320655A1 |
| US 4916751 A, 10.04.1990. | |||

