Изобретение относится к области навигации и топопривязки, в частности к способам представления и использованиям цифровой топогеодезической информации, и предназначено для определения навигационно-топогеодезических параметров для наземных подвижных объектов при решении задач топогеодезического обеспечения боевых действий подразделений Сухопутных войск.
Известен способ применения универсальной системы топопривязки и навигации (патент RU №2487316 C1, B60P 3/00, 10.07.2013), принятый за прототип. В данном способе реализовано отображение на цифровой карте местности пути и местоположения подвижного объекта, загрузка в бортовой вычислитель цифровых карт местности формата SFX4 с внешнего накопителя, автоматическая смена листов карты любого масштаба при выходе подвижного объекта за их границу, автоматическое определение на цифровой карте местности координат X, Y и высоты H точек, отмеченных курсором оператора.
Недостатками способа, взятого за прототип, являются:
- отсутствие возможности формирования конкретного района работ;
- отсутствие возможности прокладки предполагаемого маршрута движения НТС по заданным контрольным точкам;
- отсутствие возможности сохранения ранее проложенных маршрутов в памяти бортового вычислителя;
- отсутствие возможности нанесения на карту дополнительных объектов;
- отсутствие возможности формирования района работ при невозможности использования цифровых карт местности;
- отсутствие возможности изменения ориентации цифровой карты местности;
- неудобство работы с цифровыми картами местности в различных режимах.
Изобретением решается задача по повышению эффективности топогеодезического обеспечения Сухопутных войск.
Технический результат, получаемый при осуществлении изобретения, заключается в создании способа формирования режима работы с цифровыми картами местности, обеспечивающего в условиях применения, в т.ч. боевого, загрузку в бортовой вычислитель карт формата SXF4 масштабов 1:25000, 1:50000, 1:100000, 1:200000 по интерфейсу Ethernet, формирование района работ, при невозможности использования цифровых карт местности формирование района работ с координатной сеткой, отображение на ЦКМ местоположения подвижного объекта и направления его движения, автоматическую смену листов ЦКМ любого масштаба при выходе координат подвижного объекта за их границу, прокладку предполагаемого маршрута движения подвижного объекта по заданным контрольным точкам, хранение ранее проложенных маршрутов в памяти бортового вычислителя, нанесение на карту дополнительных объектов, отображение координат X, Y и H точек, отмеченных маркером оператора.
Указанный технический результат достигается тем, что в предлагаемом способе формирования режима работы с цифровыми картами местности, включающем возможность отображения на цифровой карте местности пути и местоположения подвижного объекта, загрузки в бортовой вычислитель цифровых карт местности с внешнего накопителя, автоматической смены листов карты при выходе подвижного объекта за их границу, автоматического определения на цифровой карте местности координат и высоты точек, отмеченных курсором оператора, новым является то, что способ формирования режима работы с цифровыми картами местности дополнительно включает ряд операций, направленных на расширение возможностей по использованию режима «Работа с картой»: после загрузки цифровых карт местности реализуется возможность изменения масштаба карты как в сторону увеличения, так и в сторону уменьшения; во время работы реализуется функция по скрытию или отображению цифровой карты местности; при работе реализуется возможность ориентирования листа карты по направлению движения подвижного объекта или по направлению на Север; при работе реализуется возможность центрирования карты относительно подвижного объекта, текущее местоположение которого отображается в центре рабочего окна режима «Работа с картой»; при работе реализуется возможность прокладки нескольких маршрутов, что позволяет на основе анализа картографической обстановки выбрать оптимальный; при невозможности использования цифровых карт местности используется режим формирования координатной сетки на район работ, на который отсутствует карта.
Обеспечение возможности формирования района работ, исходя из реальных условий при выполнении задач по назначению, позволяет:
- заблаговременно подобрать необходимый картографический материал, исходя из поставленной задачи;
- заблаговременно подобрать оптимальный масштаб цифровой карты местности;
- определить количество загружаемых файлов.
Обеспечение при невозможности использования цифровых карт местности формирование района работ с координатной сеткой позволяет:
- повысить боеспособность объекта военной техники, на котором используются цифровые карты местности, в условиях экстремального применения;
- расширить возможности применения объекта военной техники и его живучесть.
Обеспечение прокладки предполагаемого маршрута движения подвижного объекта по заданным контрольным точкам в количестве не менее 100 позволяет:
- с необходимой точностью спланировать оптимальный маршрут предстоящего движения подвижного объекта;
- при необходимости осуществлять редактирование проложенного маршрута.
Обеспечение хранения не менее 10 ранее проложенных маршрутов в памяти бортового вычислителя позволяет:
- сформировать базу данных проложенных маршрутов;
- эффективно осуществлять выполнение задач по назначению.
Обеспечение нанесения на карту дополнительных объектов позволяет:
- в реальном режиме времени отслеживать оперативную обстановку, сложившуюся в районе работ;
- создавать локальную систему координат, связанную со всеми элементами комплекса вооружений;
- обеспечить геодезической информацией подразделения войск и отдельные единицы вооружений;
- повысить степень автоматизации подготовки исходных данных для стрельбы;
- повысить управляемость и боеготовность войсковых подразделений.
Обеспечение центрирования карты относительно подвижного объекта позволяет:
- обеспечить удобство обзора возникающей в рабочем окне информации;
- обеспечить максимальный обзор картографической информации при работе с цифровыми картами местности.
Обеспечение ориентирования карты по направлению движения подвижного объекта или на Север позволяет:
- выполнить режим включения/выключения компаса;
- отслеживать угловое положение подвижного объекта относительно ориентиров на местности.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежами, где на фиг. 1 показано рабочее окно подрежима «Работа с картой»; на фиг. 2 - рабочее окно задачи «Прокладка маршрута»; на фиг. 3 - рабочее окно ввода данных; на фиг. 4 - рабочее окно задачи «Загрузка карт», на фиг. 5 - рабочее окно задачи «Формирование района», на фиг. 6 - рабочее окно «Начальные данные»; на фиг. 7 - функциональное назначение кнопок.
Способ формирования режима работы с цифровыми картами местности реализуется следующим образом.
Режим «Работа с картой» предназначен для работы с ЦКМ, определения местоположения (координат) подвижного объекта (ПО) 1 на цифровой карте местности (ЦКМ) 2 и выбора маршрута движения.
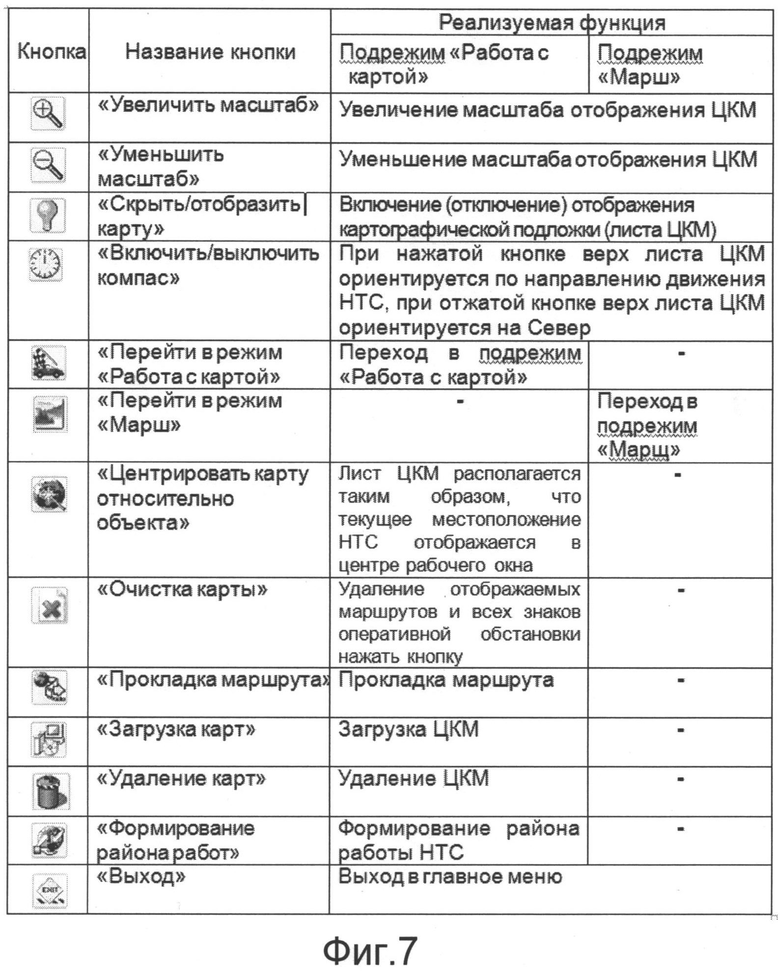
В режиме «Работа с картой» возможны два подрежима: «Марш», «Работа с картой». В верхней части рабочего окна 3 индицируется панель управления 4 с кнопками 5.
В рабочем окне 3 на фоне ЦКМ 2 отображается пройденный маршрут ПО 1.
Для увеличения масштаба листа ЦКМ 2 необходимо нажать на панели инструментов 4 кнопку «Увеличить масштаб» 6, для уменьшения масштаба листа ЦКМ 2 - кнопку «Уменьшить масштаб» 7.
Во время работы можно временно скрыть или отобразить лист ЦКМ 2, для этого необходимо нажать кнопку «Скрыть/отобразить карту» 8.
При нажатой кнопке «Включить/выключить компас» 9 верх листа ЦКМ 2 ориентируется по направлению движения ПО 1, а при отжатой кнопке верх листа ЦКМ 2 ориентируется на Север.
Подрежим «Марш» предназначен для отображения текущего местоположения и маршрута движения ПО 1 на ЦКМ 2. В нижней части окна 3 выводятся: текущие координаты, высота, дирекционный угол, скорость, пройденный путь ПО 1, название района и исходный масштаб листа ЦКМ 2, количество листов в районе, текущее время.
Подрежим «Работа с картой» предназначен для загрузки файлов ЦКМ 2, формирования района работ, прокладки маршрута и удаления знаков оперативной обстановки. В нижней части окна 3 выводятся координаты позиции, в которой находится указатель в виде перекрестия 10, текущий масштаб отображения листа ЦКМ 2, название района и исходный масштаб листа ЦКМ 2, количество листов в районе, текущее время.
При подведении указателя 10 к любому месту на ЦКМ 2, к ПО 1 или знаку оперативной обстановки в нижней строке окна выводятся координаты данного места, объекта или знака.
При нажатии кнопки «Центрировать карту относительно объекта» 11 лист ЦКМ 2 располагается таким образом, что текущее местоположение ПО 1 отображается в центре рабочего окна 3.
Для прокладки маршрута нажимается кнопка «Прокладка маршрута» 12. В появившемся окне 13 вводится количество точек, необходимых для прокладки маршрута. В окне 14 вводятся координаты точки и нажимается кнопка «Следующая точка» 15. Ввод повторяется необходимое количество раз. Для возврата в окно 13 необходимо нажать кнопку «Проложить новый маршрут» 16.
Для загрузки ЦКМ 2 необходимо нажать кнопку «Загрузка карт» 17, в появившемся окне 18 необходимо ввести путь к файлам карт, нажать кнопку «Смонтировать» 19, нажать кнопку «Просмотр списка файлов» 20, в списке отметить классификатор в формате rsc и соответствующие ему файлы в формате sxf. Далее необходимо нажать кнопку «Загрузить карты» 21. После окончания загрузки ЦКМ 2 появится операционное сообщение «Загрузка завершена».
Для формирования района работы ПО 1 необходимо нажать кнопку «Формирование района работы» 22. В появившемся окне 23 нажимается кнопка «Просмотр списка файлов» 24. В списке файлов загруженных ЦКМ 2 необходимо выбрать от двух до четырех файлов и нажать кнопку «Сформировать район работы» 25.
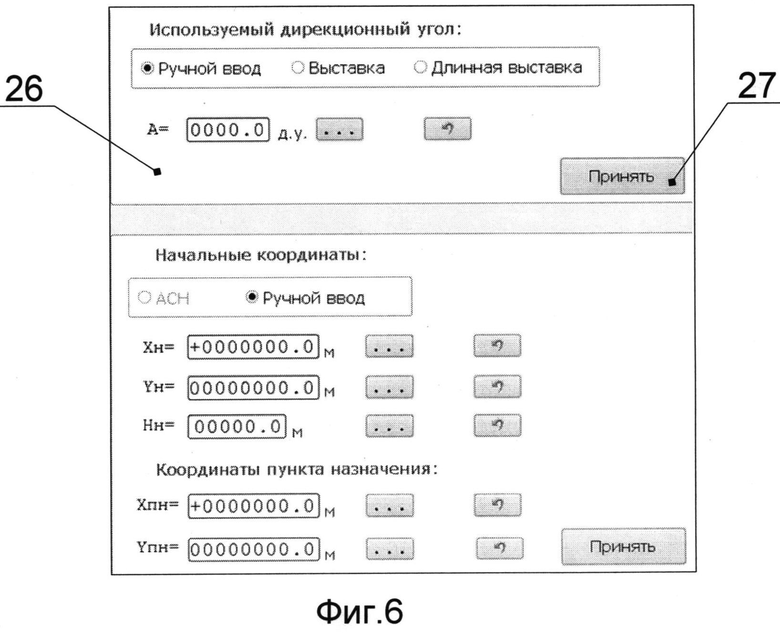
При невозможности использования ЦКМ 2 в районе работ ПО 1 формируется координатная сетка. Для этого переходят в рабочее окно 26 режима «Навигация», задача «Начальные данные», выбирают используемый дирекционный угол «Ручной ввод». Вводят значение дирекционного угла в диапазоне от 0 до 6000 д.у. и подтверждают ввод данных (кнопка «Принять» 27). Вводят произвольные значения координат (Xн и Yн) района, на которой отсутствуют ЦКМ 2. Переходят в режим «Работа с картой» и контролируют на экране появление координатной сетки.
Таким образом, в изобретении решена задача по достижению технического результата, заключающегося в создании способа формирования режима работы с цифровыми картами местности, обеспечивающего в условиях применения, в т.ч. боевого, загрузку в бортовой вычислитель карт формата SXF4 масштабов 1:25000, 1:50000, 1:100000, 1:200000 по интерфейсу Ethernet, формирование района работ, при невозможности использования цифровых карт местности формирование района работ с координатной сеткой, отображение на ЦКМ местоположения подвижного объекта и направления его движения, автоматическую смену листов ЦКМ любого масштаба при выходе координат подвижного объекта за их границу, прокладку предполагаемого маршрута движения подвижного объекта по заданным контрольным точкам, хранение ранее проложенных маршрутов в памяти бортового вычислителя, нанесение на карту дополнительных объектов, отображение координат X, Y и H точек, отмеченных маркером оператора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПОЛЬЗОВАНИЯ ТОПОГЕОДЕЗИЧЕСКОЙ ИНФОРМАЦИИ НА ОСНОВЕ ЦИФРОВЫХ КАРТ МЕСТНОСТИ (ЦКМ) | 2011 |
|
RU2452000C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ ВЫСОКОГО КЛАССА ТОЧНОСТИ | 2012 |
|
RU2500990C1 |
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| СИСТЕМА ТОПОПРИВЯЗКИ И НАВИГАЦИИ В СОСТАВЕ ОБЪЕКТА ВОЕННОЙ ТЕХНИКИ | 2014 |
|
RU2562676C1 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ И КОМПЛЕКТ СРЕДСТВ ДЛЯ ПРОВЕДЕНИЯ ИСПЫТАНИЙ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2490594C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ ПРИМЕНЕНИЯ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2487316C1 |
| СПОСОБ КОНТРОЛЯ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА | 2014 |
|
RU2572407C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В СОСТАВЕ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВОЙСКАМИ | 2012 |
|
RU2511207C1 |





Изобретение относится к области навигации и топопривязки, в частности к способам представления и использованиям цифровой топогеодезической информации, и предназначено для определения навигационно-топогеодезических параметров для наземных подвижных объектов. Техническим результатом является обеспечение эффективной навигации подвижных объектов. В способе формирования режима работы с цифровыми картами местности отображают на цифровой карте местности путь и местоположение подвижного объекта. Загружают в бортовой вычислитель цифровые карты местности с внешнего накопителя. Автоматически сменяют листы карты при выходе подвижного объекта за их границу и определяют на цифровой карте местности координат Н точек, отмеченных курсором оператора. Центрируют карту относительно подвижного объекта и ориентируют карту по направлению движения подвижного объекта или на Север. Прокладывают несколько маршрутов для выбора оптимального маршрута. При невозможности использования цифровых карт местности формируют координатную сетку на район работ, на котором отсутствует карта. 7 ил.
Способ формирования режима работы с цифровыми картами местности, включающий возможность отображения на цифровой карте местности пути и местоположения подвижного объекта, загрузки в бортовой вычислитель цифровых карт местности с внешнего накопителя, автоматической смены листов карты при выходе подвижного объекта за их границу, автоматического определения на цифровой карте местности координат точек, отмеченных курсором оператора, отличающийся тем, что способ формирования режима работы с цифровыми картами местности дополнительно включает ряд операций, направленных на расширение возможностей по использованию режима «Работа с картой»: после загрузки цифровых карт местности реализуется возможность изменения масштаба карты как в сторону увеличения, так и в сторону уменьшения; во время работы реализуется функция по скрытию или отображению цифровой карты местности; при работе реализуется возможность ориентирования листа карты по направлению движения подвижного объекта или по направлению на Север; при работе реализуется возможность центрирования карты относительно подвижного объекта, текущее местоположение которого отображается в центре рабочего окна режима «Работа с картой»; при работе реализуется возможность прокладки нескольких маршрутов, что позволяет на основе анализа картографической обстановки выбрать оптимальный; при невозможности использования цифровых карт местности используется режим формирования координатной сетки на район работ, на который отсутствует карта.
| СПОСОБ ПРИМЕНЕНИЯ УНИВЕРСАЛЬНОЙ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ | 2012 |
|
RU2487316C1 |
| СПОСОБ ПОЛУЧЕНИЯ И АКТУАЛИЗАЦИИ ЦИФРОВОГО КАРТОГРАФИЧЕСКОГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2244260C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2011 |
|
RU2481557C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННО-ТОПОГЕОДЕЗИЧЕСКИХ ПАРАМЕТРОВ | 2010 |
|
RU2431803C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

