Предлагаемые изобретения относятся к автоматике и могут быть использованы в чистых помещениях для поддержания постоянной оптимальной температуры.
Известен способ автоматического управления системами, включающий в себя использование командных и фактических величин выходных переменных для регулирования управляемой системы [Носов Г.Р. и др. Автоматика и автоматизация мобильных сельскохозяйственных машин. - К.: Высшая школа, 1984, с.171]. Для его осуществления известно устройство, включающее в себя соединенные в блоки элементы преобразования и усиления выходной переменной управляемого объекта, а также блок для измерения возмущенного воздействия на управляемом объекте.
Недостатком способа и устройства является низкая эффективность из-за недостаточной точности управления переходными процессами при требуемом быстродействии.
За прототип принят способ автоматического управления системами [См. патент РФ №2153697, G05B 17/00, 2000, Фурунжиев Р.И.], при котором выходную переменную исполнительного механизма подают на вход управляемого объекта, измеряют фактическую величину выходной переменной управляемого объекта, которую вместе с величиной выходной переменной исполнительного механизма и командной величиной выходной переменной управляемого объекта используют для формирования управляющего сигнала, который подают на вход исполнительного механизма, причем дополнительно используют отрицательную обратную связь по выходной переменной исполнительного механизма, что измеряют скорость и ускорение изменения фактической величины выходной переменной управляемого объекта и подают ее на вход блока формирования желаемых свойств движения выходной переменной управляемого объекта вместе с фактической величиной выходной переменной управляемого объекта и величиной выходной переменной исполнительного механизма.
В регуляторе, включающем в себя объединенные в блоки элементы преобразования и усиления скорости сигнала управляемого объекта, каналы измерения величины, скорости и ускорения выходной переменной которого связаны со входами регулятора, выход которого связан со входом исполнительного привода, выход последнего связан со входом управляемого объекта, имеются признаки: каналы измерения выходной переменной скорости и ускорения управляемого объекта связаны со входами блока, формирующего желаемые свойства движения выходной переменной управляемого объекта.
Прототипы обладают существенными недостатками: невозможностью автоматизации в адаптивном диапазоне из-за необходимости ручной настройки по субъективной мере оценки. Это снижает универсальность использования способа и устройства и их эффективность.
Технической задачей предлагаемого решения является автоматизация регулирования системами в адаптивном диапазоне за счет адаптивной оценки сигнала по программно-управляемой нормируемой мере.
Поставленная задача достигается тем, что
1. в способе автоматического управления системами, при котором выходную переменную исполнительного механизма подают на вход управляемого объекта, измеряют фактическую величину выходной переменной управляемого объекта, которую вместе с командной величиной входной переменной управляемого объекта используют для формирования управляющего сигнала. Управляющий сигнал подают на вход исполнительного механизма за счет использования отрицательной обратной связи по выходной переменной управляемого объекта. В отличие от прототипа выходную переменную управляемого объекта в цифровом эквиваленте подают на вход блока контроллера, управляющий сигнал которого соответствует желаемым свойствам выходной переменной управляемого объекта и его реализуют мультипликативно-симметричным критерием погрешности, выполняющим роль автоматического регулятора, который адаптируется по диапазону за счет оценки фактических величин входной и выходной переменной к нормированному эквиваленту их максимальных величин в каждый момент времени, и соответствующим квадрату отношения разности и суммы командной входной и выходной переменных управляемого объекта.
2. В системе автоматического управления, содержащей контроллер, последовательно соединенный через исполнительный механизм с управляемым объектом, в отличие от прототипа, исполнительным механизмом служит цифроаналоговый преобразователь и дополнительно введен аналого-цифровой преобразователь, включенный между выходом управляемого объекта и входом контроллера, который состоит из задатчика командной величины, последовательно соединенных с ним сумматоров, выходы которых через делитель связаны с блоком возведения в степень, выход которого является выходом контроллера, входами которого являются вторые входы сумматоров, служащие для выходной переменной управляемого объекта.
3. В системе по п. 2, в отличие от прототипа, контроллер состоит из задатчика командной величины, подключенного ко входам сумматора и умножителя. Выход сумматора объединен со входом квадратора, выход которого через делитель связан с выходом умножителя, а выход делителя соединен через блок вычитания с выходом контроллера.
4. В системе по п. 2, в отличие от прототипа, контроллер выполнен на программируемой логической матрице, включающей по числу эквивалентов командной величины количество программируемых дешифраторов двоичного кода входной переменной командной величины и выходной переменной управляемого объекта, систематизированных в адресном пространстве программируемой логической матрицы в знакогенератор, информационные входы которого служат для тактирования переменными, а выходы для формирования управляющего сигнала знакогенератора, который адаптируется по диапазону за счет оценки фактических величин входной и выходной переменных к нормированному эквиваленту их максимальных величин в каждый момент времени и соответствующим квадрату отношения разности и суммы командной входной и выходной переменных управляемого объекта на выходах логической матрицы.
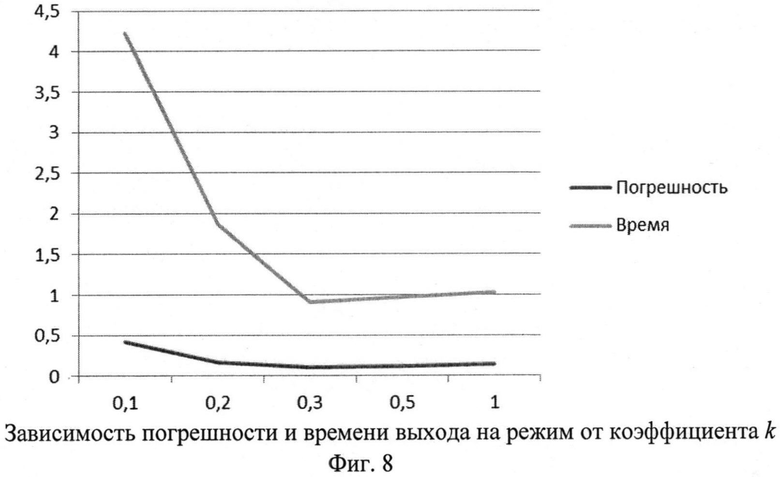
Сущность способа и устройства поясняют фиг. 1-8. Фиг. 1-5 отражают структуры устройства на уровне обобщенной и структурной, функциональной и матричной схем. Зависимости амплитудно-временных динамических характеристик U и погрешности ε от вида управляющего воздействия показаны на фиг. 6-7, качественный анализ которых представлен в таблицах 1-3. Фиг. 8 показывает зависимость погрешности ε и времени t выхода на режим от коэффициента k, реализуемой при регулировании с использованием стандартного критерия.
В предлагаемом способе автоматического управления системами выходную переменную ε(E,U)=ε исполнительного механизма подают на вход управляемого объекта, измеряют фактическую величину U выходной переменной управляемого объекта, которую вместе с командной величиной входной переменной Е управляемого объекта используют для формирования управляющего сигнала ε(U2,Е)=ε2. Его подают на вход исполнительного механизма, причем используют отрицательную обратную связь по выходной переменной U управляемого объекта. Для автоматизации регулирования в адаптивном диапазоне выходную переменную U управляемого объекта в цифровом эквиваленте U2 подают на вход блока контроллера, управляющий сигнал ε(U2,E)=ε2 которого соответствует желаемым свойствам выходной переменной U управляемого объекта.
Алгоритм вычисления управляющего сигнала, в цифровом ε(U2,Е)=ε2 и тождественном аналоговом ε(U,E)=ε представлении, выполняющего функцию автоматического регулятора (погрешности мультипликативно-симметричного критерия МСК), оценивают по относительной погрешности:

где (ХСГ/ХСА)2 - отношение произведения случайных величин переменных ПUi к их нормируемому эквиваленту - max П=XCA, для i=1,2, т.к. используется n=2 переменных U1=E и U2=U, соответствует (XCA)2.
Их физический смысл тождественен квадрату средней геометрической оценки:

произведения переменных сигналов Е и U, а также квадрату среднего арифметического:

Раскрывая значения ХСГ и ХСА соответственно (2) и (3), преобразуем (1):
Приведем выражение к общему знаменателю, раскроем скобки и объединим подобные члены:
Выражение [E2-2EU+U2) представляет собой квадрат разности, а 

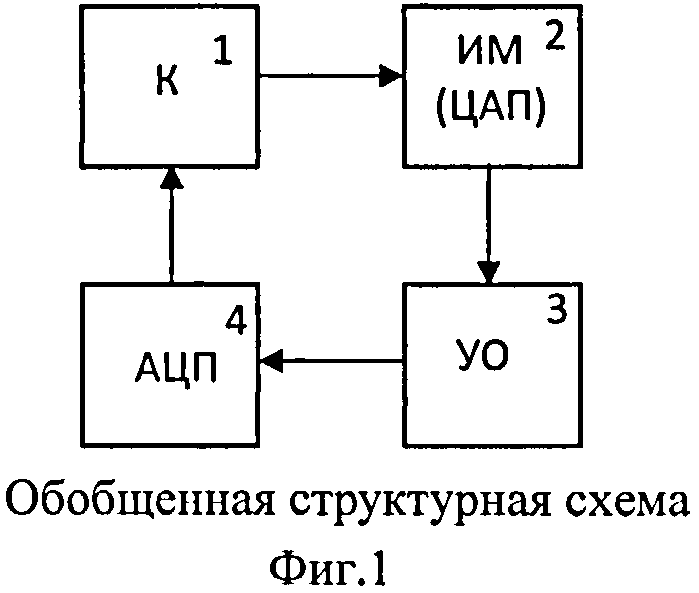
Сущность способа поясняют фиг. 1-5. Фиг. 1 - обобщенная структурная схема, на которой 1 - контроллер (К), 2 - исполнительный механизм (ИМ) в виде цифроаналогового преобразователя (ЦАП), 3 - управляемый объект (УО), 4 - аналого-цифровой преобразователь (АЦП).
1. На обобщенной структурной схеме (Фиг. 1) выходную переменную е исполнительного механизма 2 подают на вход управляемого объекта 3, измеряют фактическую величину U выходной переменной управляемого объекта, которую вместе с командной величиной входной переменной Е управляемого объекта в коде U2 используют для формирования управляющего сигнала ε(E,U2)=ε2. Его подают на вход исполнительного механизма 2, причем используют отрицательную обратную связь по выходной переменной U управляемого объекта 3. Для автоматизации регулирования в адаптивном диапазоне выходную переменную U управляемого объекта преобразуют в код U2, подают на вход блока контроллера 1, управляющий сигнал ε которого соответствует желаемым свойствам выходной переменной U управляемого объекта. Управляющий сигнал ε реализуют мультипликативно-симметричным критерием (МСК) погрешности (4), соответствующим квадрату отношения разности (E-U) и суммы (E+U) командной входной Е и выходной U переменных управляемого объекта 3 и выполняющим роль автоматического регулятора. МСК 
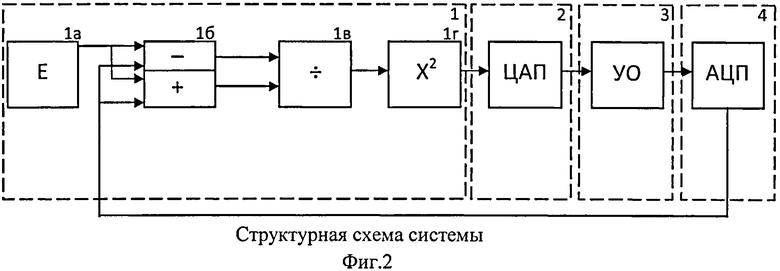
2. На фиг. 2 показана структурная схема системы автоматического управления, содержащая контроллер 1, последовательно соединенный через исполнительный механизм 2 с управляемым объектом УОЗ, отличающаяся тем, что исполнительным механизмом 3 служит цифроаналоговый преобразователь ЦАП и дополнительно введен аналого-цифровой преобразователь АЦП4, включенный между выходом управляемого объекта 3 и входом контроллера 1. Контроллер 1 состоит из задатчика командной величины (1а), последовательно соединенных с ним сумматоров (1б), выходы которых через делитель (1в) связаны с блоком возведения в степень (1г), выход которого является выходом контроллера 1, входами которого являются вторые входы сумматоров, служащие для выходной переменной управляемого объекта.
На структурной схеме системы (фиг. 2) выходную переменную Е блока задатчика командной величины 1а подают на вход сумматоров 1б. Измеряют фактическую величину выходной переменной U (тождественной цифровому эквиваленту U2) управляемого объекта 3, которую вместе с величиной входной переменной Е контроллера 1 подают на сумматоры 1б. Сигналы E-U и Е+U подают на делитель 1в, а затем на блок возведения в степень 1г, которые используют для формирования управляющего сигнала ε (4). Управляющий сигнал ε(U2,Е) подают на вход исполнительного механизма ЦАП 2. Сигнал с исполнительного механизма ε подается на управляемый объект 3. Дополнительно используют отрицательную обратную связь по выходной переменной управляемого объекта 3. Управляющее воздействие, соответствующее желаемым свойствам выходной переменной U управляемого объекта 3, реализуют мультипликативно-симметричным критерием погрешности (1). Блок 1 на фиг. 1 соответствует квадрату отношения разности и суммы входной и выходной переменных управляемого объекта U и выполняет роль автоматического регулятора. МСК адаптируется по диапазону за счет оценки фактических величин входной Е и выходной переменной U (2) к нормированному эквиваленту их максимальных величин (3) в каждый момент времени. Сигнал U с управляемого объекта 3 преобразуют АЦП 4 в цифровой эквивалент (сигнал U2) и подают на вход сумматоров 1б.
Конкретное исполнение блоков может иметь следующие признаки (фиг. 1): блок 1 является контроллером, необходим для задания сигнала Е и формирования управляющего сигнала ε(U2,E)=ε2. Блок 2 представляет собой исполняющий механизм (в виде ЦАП) для преобразования ε2 в аналоговый сигнал ε (4). Блок 3 является управляемым объектом. Сигнал U с выхода управляемого объекта 3 управления подается на вход АЦП 4, с которого сигнал в цифровом эквиваленте U2 поступает на блок контроллера (1).
3. На фиг. 3 представлена функциональная схема системы, отличающаяся тем, что контроллер 1 состоит из задатчика командной величины (1а), подключенного ко входам умножителя (1д) и сумматора (1б), выход которого объединен со входом квадратора (1в), выход которого через делитель (1г) связан с выходом умножителя 1д. Выход делителя (1г) соединен через блок вычитания (1е) с выходом контроллера 1.
Входную переменную Е задатчика командной величины 1а подают на вход умножителя 1д и сумматора 1б. Сигнал П=EU с умножителя 1д подают на блок деления 1г, а сигнал Σ=E+U с сумматора 1б подают на квадратор 1в и нормируют в степень 2. Затем оба этих сигнала поступают на делитель (1г), а их отношение вычитают из единицы в блоке 1е, т.е. формируют управляющий сигнал (1).
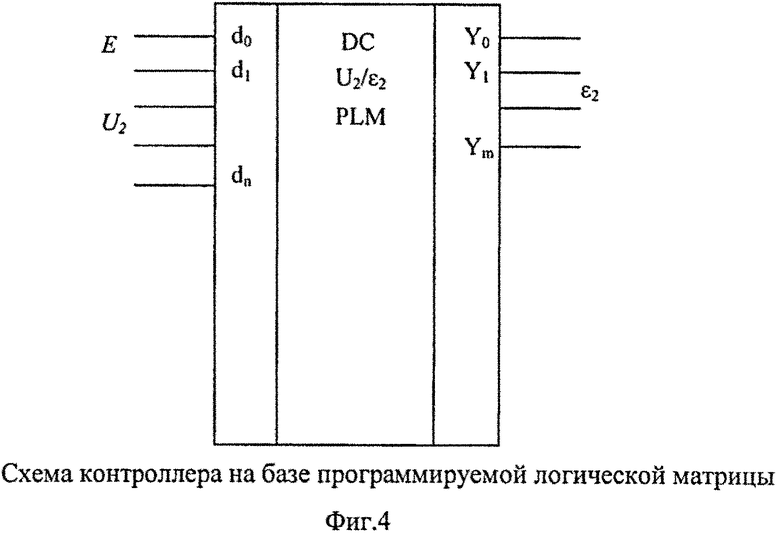
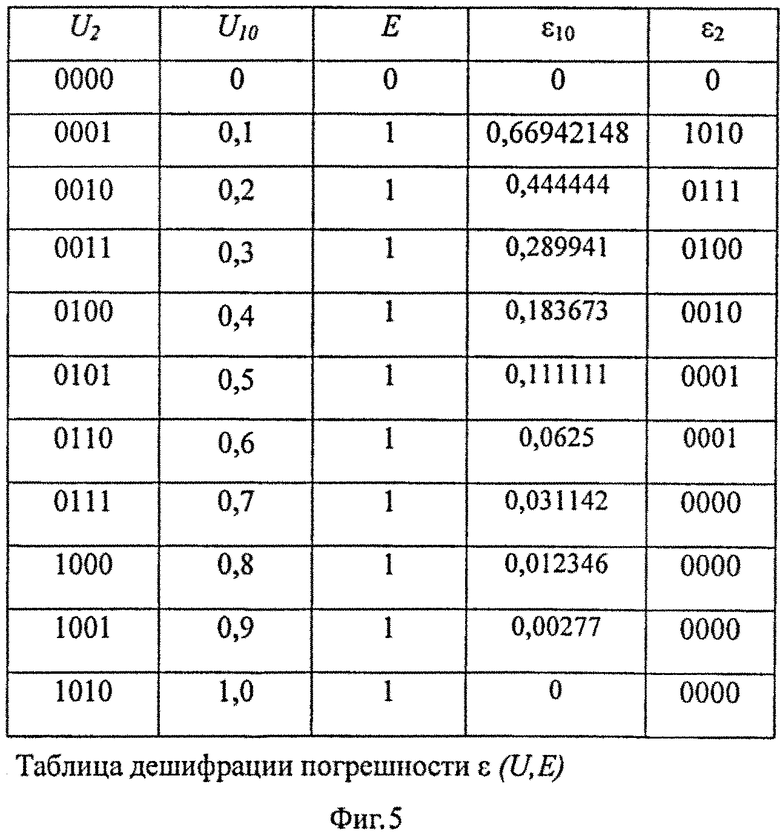
4. Функциональную схему поясняет архитектура контроллера как неделимая совокупность программируемой логической матрицы (фиг. 4) и таблицы (фиг. 5) дешифрации погрешности. Контроллер 1 выполнен на программируемой логической матрице (ПЛМ, PLM), включающей по числу эквивалентов командной величины Е количество программируемых дешифраторов (DC) двоичного кода входной переменной командной величины Е и выходной переменной управляемого объекта U2, систематизированных в адресном пространстве программируемой логической матрицы в знакогенератор. Его информационные входы d0-dn служат для тактирования переменными Е и U2, а выходы Y0-Ym - для формирования управляющего сигнала ε(U2,Е)=ε2 знакогенератора, который адаптируется по диапазону за счет оценки фактических величин входной Е и выходной U переменных (2) к нормированному эквиваленту (3) их максимальных величин в каждый момент времени и соответствующим квадрату отношения (4) разности и суммы командной входной и выходной переменных управляемого объекта на выходах логической матрицы. Таблица дешифрации (фиг. 5) поясняет адресное пространство знакогенератора ПЛМ на примере первого эквивалента командной величины Е (0,1) первого дешифратора произведений (2) в управляющий сигнал (4). Первый и второй столбцы таблицы отражают выходные переменные U управляемого объекта, соответственно, в двоичном U2 и десятичном U10 коде. Последний и предпоследний столбцы иллюстрируют результат дешифрации управляющего сигнала (4) также в двоичном ε2 и десятичном ε10 коде.
Основными критериями оценки качества работы пропорционального регулирования являются погрешность и время выхода на установившееся значение динамической характеристики.
Проведем сравнение эффективности предлагаемого критерия МСК со стандартным критерием, коэффициенты которого настраиваются вручную:

где Е - это установившееся значение командной величины входной переменной, а U - значение выходной в данный момент времени. Стандартной и самой распространенной мерой оценки считается разность (5) между установившимся и текущем значении, что объясняется простотой ее вычисления. Но достоверность и объективность этой оценки условны из-за отсутствия оптимального эквивалента. Нормируем критерий (5) до уровня погрешности.
Относительная погрешность при стандартном критерии находится по формуле:

На фиг. 8 показаны зависимости погрешности и времени выхода на режим от коэффициента k при использовании стандартного критерия (табл.1).
В процессе ручного регулирования (фиг. 8) из семейства выбрана лучшая характеристика по стандартному критерию (6) с оптимальным коэффициентом регулирования k=0,3 с минимальной погрешностью ε=0,103 и временем выхода на режим t=0,81 с.
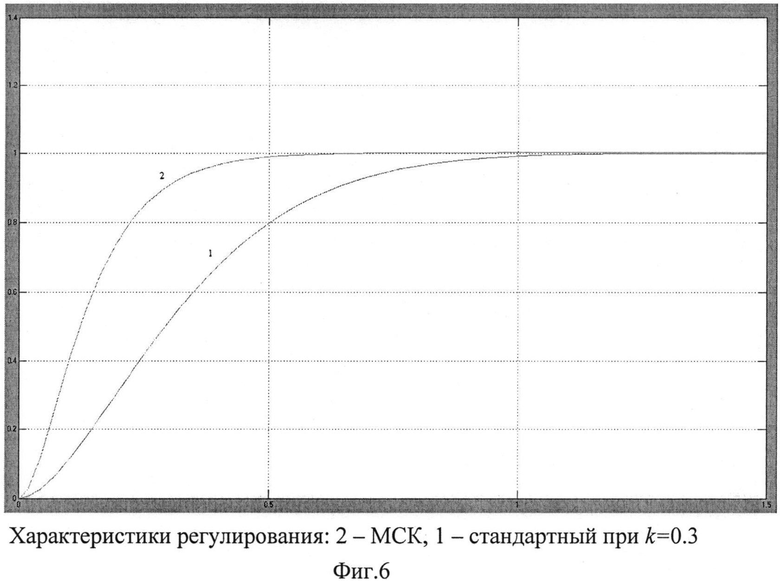
Результаты компьютерного моделирования зависимости амплитудно-временных динамических характеристик 1 и 2, соответствующих мультипликативно-симметричному (1,4) и стандартному (6) критериям, систематизированы на фиг. 6. Качественный анализ фиг.6 показывает повышение эффективности выхода на режим характеристик от стандартного 1 до прецизионного 2 критерия. Для проведения количественного анализа на фиг. 7 зафиксируем значение t=0.2 и оценим значение погрешности при фиксированном времени (табл.2).
Количественный анализ табл.2 показывает снижение погрешности регулирования с 65% для стандартного 1 до 5% МСК 2 критерия. Погрешность МСК 2 в 13 раз лучше стандарта 1, т.е. прецизионная, т.к. на порядок ниже.
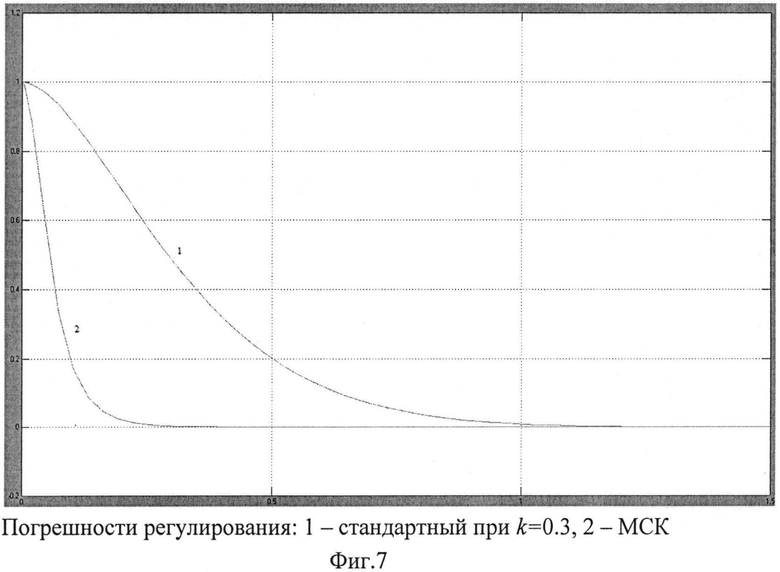
На фиг. 7 показаны графики погрешностей прецизионного критерия МСК 2 и наиболее оптимально отрегулированного для k=0,3 (фиг. 8) стандартного 1 критерия. Для анализа оперативности зафиксируем уровень 0,2 погрешности и оценим текущее значение времени по оперативности (см. табл.3).
Эффективность по оперативности рассчитаем из отношения интервалов регулирования стандартного 1 t2 и МСК 2 t1 критериев, что позволяет сравнить, во сколько один критерий эффективнее другого:
Как видно из фиг. 7, МСК 2 критерий эффективнее стандартного 1 в 5 раз, т.е. практически на порядок выше.
Проведем анализ эффективности по точности стандартного 1 критерия ε1 относительно МСК 2 критерия ε2, поделив (6) на (4):
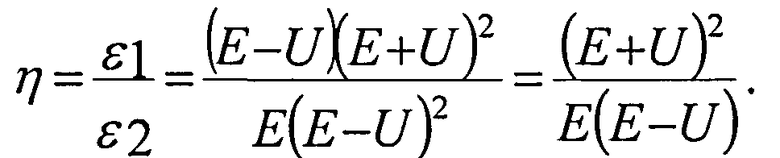
Выразим U пропорционально командной Е величине U=E/m, тогда:

Из (7) находим:
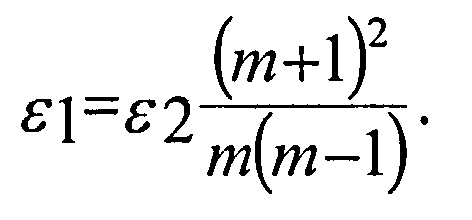
Предположим, что m меняется от 1,01 до 1,1, результаты эффективности η систематизируем в табл.4:
Из табл.4 видно, что ε1 всегда больше ε2 в η раз, следовательно, предлагаемый МСК 2 эффективнее стандартного 1 на 2 порядка. Кроме того, (7) показывает, что m может меняться в диапазоне от 1 до 0 и физически является коэффициентом k управления, т.е. η=k (табл.5):
Из табл.5 следует, что коэффициент управления не константа, а функция с оптимумом при m=0,3(3), что позволяет сделать вывод о его адаптивности при автоматизации процесса регулирования до желаемого оптимального нормированного эквивалента.
Таким образом, формирование управляющего сигнала по программно-управляемой нормируемой мере МСК погрешности в отличие от известных решений повышает в два раза эффективность по точности и на порядок эффективность автоматического регулирования за счет оценки фактических величин входной и выходной переменной к нормированному эквиваленту их максимальных величин. Нормированный эквивалент по следящей обратной связи автоматически оптимизирует параметры динамической характеристики системы в адаптивном диапазоне, это исключает ручное регулирование оператором и на порядок повышает метрологическую эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система автоматического управления | 2016 |
|
RU2624136C1 |
| Способ и система регулирования температуры и давления тензомостом | 2018 |
|
RU2690090C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОДАЧЕЙ ПРИ ТОКАРНОЙ ОБРАБОТКЕ ДЕТАЛЕЙ НА ОБОРУДОВАНИИ С ЧПУ | 2010 |
|
RU2458773C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| СПОСОБ И РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ СИСТЕМАМИ | 1997 |
|
RU2153697C2 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| СПОСОБ ВЫРАБОТКИ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ ДЛЯ ПРОМЫШЛЕННОГО ОБЪЕКТА УПРАВЛЕНИЯ | 2011 |
|
RU2450303C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| Система гидроприводов дроссельного регулирования | 1983 |
|
SU1155991A1 |
| СПОСОБ ВЫРАБОТКИ УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ ДЛЯ ПРОМЫШЛЕННОГО ОБЪЕКТА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ РАБОЧИМ ПРОЦЕССОМ | 2011 |
|
RU2459225C1 |
Изобретение относится к автоматике и может быть использовано в чистых помещениях для поддержания постоянной оптимальной температуры. Технический результат - автоматизация регулирования системами в адаптивном диапазоне за счет адаптивной оценки сигнала по программно-управляемой нормируемой мере. Поставленная задача достигается тем, что в системе автоматического управления, содержащей контроллер, последовательно соединенный через исполнительный механизм с управляемым объектом, в отличие от прототипа исполнительным механизмом служит цифроаналоговый преобразователь и дополнительно введен аналого-цифровой преобразователь, включенный между выходом управляемого объекта и входом контроллера, который состоит из задатчика командной величины, последовательно соединенных с ним сумматоров, выходы которых через делитель связаны с блоком возведения в степень, выход которого является выходом контроллера, входами которого являются вторые входы сумматоров, служащие для выходной переменной управляемого объекта. 2 н. и 2 з.п. ф-лы, 8 ил., 5 табл.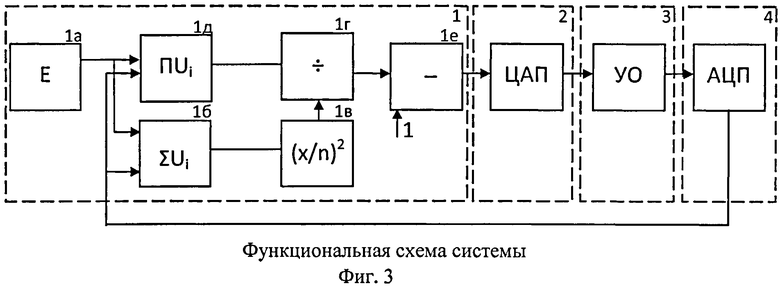
1. Способ автоматического управления системами, при котором выходную переменную исполнительного механизма подают на вход управляемого объекта, измеряют фактическую величину выходной переменной управляемого объекта, которую вместе с командной величиной входной переменной управляемого объекта используют для формирования управляющего сигнала, который подают на вход исполнительного механизма за счет использования отрицательной обратной связи по выходной переменной управляемого объекта, отличающийся тем, что выходную переменную управляемого объекта в цифровом эквиваленте подают на вход блока контроллера, управляющий сигнал которого соответствует желаемым свойствам выходной переменной управляемого объекта, и его реализуют мультипликативно-симметричным критерием погрешности, выполняющим роль автоматического регулятора, который адаптируется по диапазону за счет оценки фактических величин входной и выходной переменных к нормированному эквиваленту их максимальных величин в каждый момент времени, и соответствующим квадрату отношения разности и суммы командной входной и выходной переменных управляемого объекта.
2. Система автоматического управления, содержащая контроллер, последовательно соединенный через исполнительный механизм с управляемым объектом, отличающаяся тем, что исполнительным механизмом служит цифроаналоговый преобразователь и дополнительно введен аналого-цифровой преобразователь, включенный между выходом управляемого объекта и входом контроллера, который состоит из задатчика командной величины, последовательно соединенных с ним сумматоров, выходы которых через делитель связаны с блоком возведения в степень, выход которого является выходом контроллера, входами которого являются вторые входы сумматоров, служащие для выходной переменной управляемого объекта.
3. Система по п. 2, отличающаяся тем, что контроллер состоит из задатчика командной величины, подключенного ко входам умножителя и сумматора, выход которого объединен со входом квадратора, выход которого через делитель связан с выходом умножителя, а выход делителя соединен через блок вычитания с выходом контроллера.
4. Система по п. 2, отличающаяся тем, что контроллер выполнен на программируемой логической матрице, включающей по числу эквивалентов командной величины количество программируемых дешифраторов двоичного кода входной переменной командной величины и выходной переменной управляемого объекта, систематизированных в адресном пространстве программируемой логической матрицы в знакогенератор, информационные входы которого служат для тактирования переменными, а выходы - для формирования управляющего сигнала знакогенератора, который адаптируется по диапазону за счет оценки фактических величин входной и выходной переменных к нормированному эквиваленту их максимальных величин в каждый момент времени и соответствующим квадрату отношения разности и суммы командной входной и выходной переменных управляемого объекта на выходах логической матрицы.
| СПОСОБ И РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ СИСТЕМАМИ | 1997 |
|
RU2153697C2 |
| Система управления | 1989 |
|
SU1633376A1 |
| SU 6664444, 05.06.1979 | |||
| US 8219260 B2, 10.07.2012 | |||
| US 7418432 B2, 26.08.2008. | |||

