СП
;л
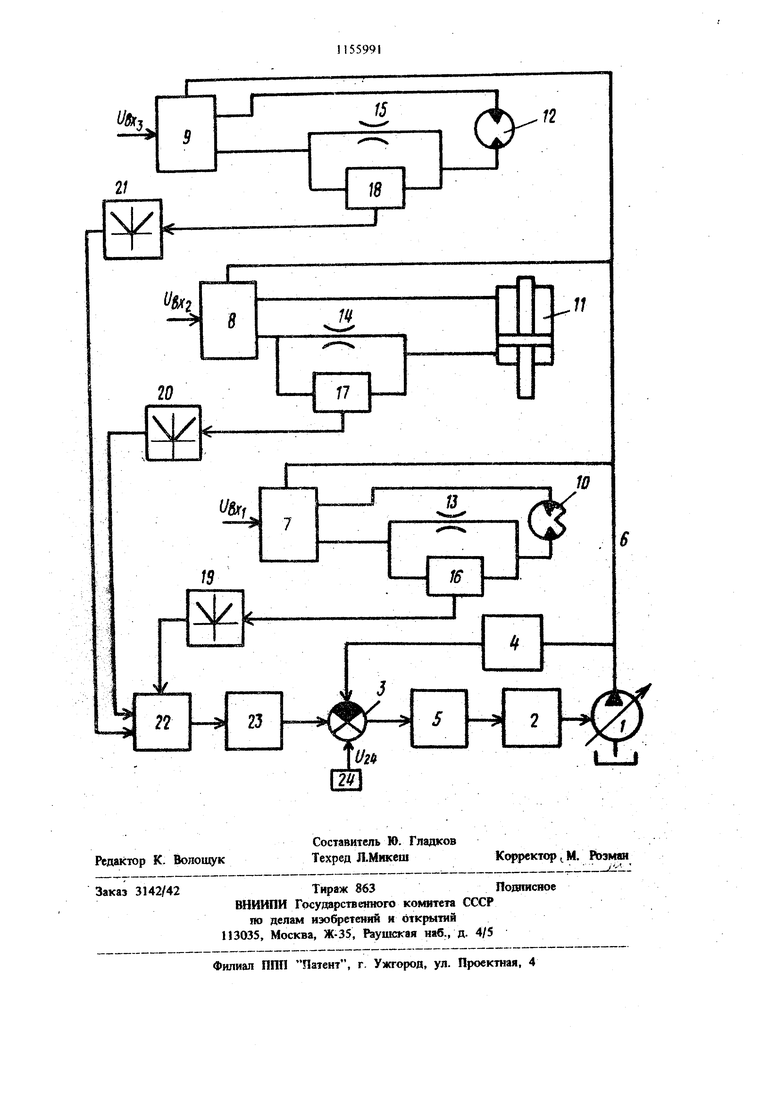
со :JD Изобретение относится к робототехнике и может найти применение при построении электрогидравлических исполнительных мехайизмов роботов и манипуляторов. Цель изобретения - повышение точности и быстродействия системы. На чертеже приведена блок-схема системы. Блок-схема содержит управпяемь1Й источник питания 1, исполнительный механизм 2, блок сравнения 3, да.тчик давления 4, усилитель 5, гидравлическую линию нагнетания 6, гшфоуси лители 7-9 гидродвигатели 10-12, дроссели 13, 15, дифференциальные датчики давления 16-18, нелинейные блоки 19-21, сумматор 22, корректирующий блок 23, задатчик 24. На чертеже обозначено Ui - выходнсЛ сигнал i-ro блока, Ugj( , Ugj( , Ugu .входные снгналы системы. В качестве управляемого источника Питания 1 может быть примеиен насос переменной производительности. В качестве нелинейны блоков 19-21 - блоки выделения модуля. Соединение задатчика 24, блока сравнения 3, усилителе 4, исполнительного механизма 2 И . датчика давления 4 функдаонально предсгав пя ет собой регулирующее устройство, для которого управляемый источник питания t явля ется объектом регулирования. Гидроусилители 7-9, гидродвигатели 1012, дроссели 13-15 и дифференишшьные датчики давления входят в состав гидроприводов, каждый из которых содержит по одному дросселю, (фференциальному датчику давления, гндроуснлителю и гидродвигателю. Число гидроприводов и тип гидродвигателей в данной системе могут быТь произвольными. Система работает следующим образом. Задающий сигнал Uj4 с выхода задатчика 24 поступает на первый вход блока сравнения 3, на остальные входы которого поступают сигналы U4 и Uj с выходов датчика давления 4 и корректирующего блока 23. Выходной .сигнал Uj блока сравнения 3, равный Uj Uj4 - U4 - Ujj, , поступает ja вход усилителя 5. Выходной сигнал Ojусилителя 5, равный Uy К . Uj (гд KS - коэффициент усиления усилителя 5), п ступает на вход исполнительного механизма 2 который осуществляет изменение производительности управляемого источника питания 1. Управляемый источник питания 1 через гидравлическую линию нагнетания 6 и гидроуснлители 7-9 осуществляет питание гидродвигателей 10-12. При подаче входных сигналов 0 ю.. и j на управляющие входы гидроусилителей 7-9 от командных устройств (например, от управляющей электронно-йычислителыюй мащн ны, от;задающего органа манипулятора и т. д., которые на чертеже не показаны), в выходных гидравлических линиях гидроусилителей 7-9, в которых установлены гидродвигатели 10-12 появятся потоки рабочей жидкости. Это потоки рабочих органов гидродвигатеяей 10-12 (например, вала гидромотора, инока гидроцилиндра и т.д.). Направление потока рабочей жидкости и соответственно перемещение рабочего органа соответствующего гидродвтателя 10-12 определяется полярностью входных сигналов Ц , Ugjj , Ugj гидроусилителей 7-9. При изменении величин и знаков входаых сигналов ift, Ug,jf ,0 меняется величина, суммарного расхода - рабочей жидкости, потребляемой гндродвигател} 1ми 0-12 О1 управляемого источника питания 1. Это вызывает изменение давления з гидравлической линии нагнетания 6 до тех пор, пока разность выходного сигнала U4 датчика давления 4, измеряющего давление в гидравлической ли НИИ нагнетания 6, и выходного сигнала Uj задатчика 24, усиленная усилителем 5, не воздействует на исполнительный механизм 2 так, чтобы подача рабочей жидкости управляемым источником питания 1 в гидревлическую линию нагнетания 6 сравнялась величине с cy iмapным расходом рабочей жидкости, потребляемым гидродвигателями 10-12/Результатом такого кратковременного изменения давления в гидравлической линим нагнетания 6 является возникновение вьшужденных рабочих органов гидродвигателей 10- 12 и тем самым сниженне точности отработки входньы сигналов 0, Ug| . U Уменьшить ялиянне внещннх возмуикний на стабильность яоддержания требуемого давления 8 гидравлической линим нагнетания 6 с помощью комбинированного управ яения управляемым источником питания 1. Для этого Б выходной гидравлической линии каждого усилителя 7 (или 8, или 9) последовательно с гндродвигателем 10 (или 11, или 12) установлен дроссель 13 (или 14, или 15), параллельно которому установлен дифференш1альный датчик давления 16 (или 17, или 18). Так как перепады давления на дросселях 13-15, которые измеряются дифференциальнымн датчиками давления 16-18, зквивалентны расходу через гидродвигатели 10-12 то выходные снгналы Ц , U , Jis дифференциальных датчиков давления являются аналогами расходов рабочей жидкости, потреб ляемой гидродвигателями 10-12. Выхош1ые снгналы Ц , U , дифференциальных датчиков давления 16-18 че- , рез нелинейные блоки (т.е. блоки выделения 3 модуля) 19-21 поступают на входы сумматора 22. Выходной сигнал сумматора 22 эквивалентен фактическому суммарному расходу рабочей жидкости через все гидроусилители 10-12 данной системы, при любых полярно тях входньис сигналов Ugj , и, , на управляющих входах гидроусилителей 7-9. Указанный выходной сигнал Uj поступает на вход корректирующего блока 23, кото рый обеспечивает необходимое фазовое опережение компенсирующего сигнала, т. е. выходного сигиала Un сумматора 22. Частотны свойства корректирующего блока 23 вьгбираются исходя из характеристик управляемого источника питания 1 и ие зависят от параметров гидроусилителей 7-9 и гидродвигателей lOh-12. Практически корректирующий блок с передаточной функцией ,. 914 где Т Гг , U, и , i - коэффициент усиления и постоянные времени корректирующего блока 23; р - оператор Лапласа. На выходе корректирующего блока 23 формируется сигнал, который поступал на третий вход блока сравнения 3, что позволяет ускорить изменение параметров управляемого источника питания 7 и тем самым уменьшить JB системе рассоглзсова1шя между заданным и потребляемым расходом рабочей жидкости. При зтом существенно повыщается точность поддержания давления в гидравлической лини нагнетания 6 и сводятся к минимуму взаимодействия гидродвигателей 10-12 друг на друга через управляемый источник питания 1, устраняется также сама возмозююсть осуществления ложной компелсашш. Кроме того, повышается точность отработки входных сигналов , IJg Up гидродвигателями 10-12, а исключение интегрирующих блокс« из системы позволяет повысить ее точность..
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Гидропривод | 1977 |
|
SU684167A1 |
| Электрогидравлический следящий привод | 1980 |
|
SU941701A1 |
| Электрогидравлический усилитель | 1990 |
|
SU1710866A1 |
| ТРЕХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 2007 |
|
RU2346187C2 |
| Гидравлический источник питания | 1983 |
|
SU1201561A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Двухрежимный гидроусилитель | 1979 |
|
SU840515A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2311568C2 |
СИСТЕМА ГИДРОПРИВОДОВ ДРОС РЕГУЛИРОВАНИЯ, содержащая нелинейные блоки, соединенные выходами с входами сумматора, последовательно соединенные эадатчик, блок сравнения, усилитель, исполнительный механизм и управляемый источник питания, подключенный гидравлической линией нагнетания к входам гищюусилнтелей и датчика давления, соединенного выходом с вторым входом блока сравнения, и гидродвигателей, установленных в выходных гидравлических линиях-, соответствующих гидроусилителей, отличающаяся тем, что, с целью повышения точности и быстродействия системы, в нее дополнительно введены дифференциальные датчики давления, дроссели и корректирующий блок, причем каждый дифференшгальный датопс давления и каждый дроссель соединены между собой параллельно и установлены в выходной гидравлической линия соответствующего гидроусилителя последовательно с гидродвигателем,выходы дифференциальных датчиков давле- 5 ния подключены к входам соответствующих нелинейных блоков, а вход и выход кррректн { ющего блока соединены соответственно с выходом сумматора и третьим входом блока равнения.
| 1979 |
|
SU826103A1 | |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| СИСТЕМА ГИДРОПРИВОДОВ ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ | 1979 |
|
SU826101A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
