Изобретение относится к автоматике и касается способа и средств управления различными системами, в том числе управления приводами любых типов, а также порождения и поддержания в системах предписанных свойств движения.
Известен способ автоматического управления системами, включающий в себя использование командных и фактических величин выходных переменных управляемой системы (Носов Г.Р. и др. Автоматика и автоматизация мобильных сельскохозяйственных машин. - К.: Вища шк., 1984, с. 171). Недостатком такого способа является низкая его эффективность из-за недостаточной точности управления переходными процессами при требуемом быстродействии. Для осуществления этого способа известно устройство, включающее в себя соединенные в блоки элементы преобразования и усиления выходной переменной управляемого объекта, а также блок для измерения возмущенного воздействия на управляемом объекте (см. там же, фиг. 3.31).
Недостатком такого устройства является то, что регулирование осуществляется по одному типу возмущения, а другие возмущения не учитываются. Это отрицательно сказывается на качестве работы устройства.
Более точный способ, заключающийся в использовании командной и фактической величины управляемой переменной, а также величины выходной переменной исполнительного механизма, с последующим формированием управляющего сигнала, а также устройство для осуществления такого способа (ПИД-регулятор), включающее в себя объединенные в блоки элементы преобразования и усиления выходного сигнала, управляемого объекта, каналы измерения величины, скорости и ускорения выходной переменной которого связаны со входом измерительного блока, выход которого связан со входом регулирующего блока, выход обоих блоков связан со входом исполнительного привода, выход которого связан со входом управляемого объекта (см. , например, Средства автоматики и телемеханики. /Бохан Н. И. и др. - Минск.: 1992, с. 247 - 249, фиг. 7.12, с. 266 - 274, фиг. 7.20 - 7.26).
Данные способ и регулятор выбраны за прототипы заявляемого объекта. Однако и они обладают существенными недостатками: сложностью наладки для обеспечения заданного критерия оптимальности протекания процесса регулирования; невозможностью одновременного удовлетворения требованиям точности и быстродействия. Это снижает универсальность использования способа и устройства и их эффективность.
Задачей, решаемой предполагаемым изобретение, является повышение универсальности и эффективности способа автоматического управления системами, а также улучшения качества и универсальности использования устройства для осуществления этого способа.
Поставленная задача решается тем, что в способе автоматического управления системами, заключающемся в использовании командной и фактической величин переменной и ее производных, а также величины выходной переменной исполнительного механизма, с последующим формированием управляющего сигнала, имеются существенные различия, а именно:
на основании командной и фактической величин выходной переменной и ее производной формируется сигнал, соответствующий желаемым свойствам движения выходной переменной, на основании которого формируют компонент управления, соответствующий этим желаемым свойствам, причем на базе величины ускорения выходной переменной формируют компонент управления, отражающий фактическое динамическое состояние управляемой системы, кроме того, на основании выходной переменной исполнительного механизма формируют компонент управления, компенсирующий изменение управляющего сигнала вследствие использования априори введенной отрицательной обратной связи по выходной переменной исполнительного механизма, после чего упомянутые полученные компоненты суммируют в каждый момент времени, образуя фактически величины управляющего сигнала, кроме того, на основании скорости и ускорения управляемой переменной формируют компонент управления, компенсирующий недостатки используемого исполнительного механизма.
Поставленная задача решается тем, что в регуляторе, включающем в себя объединенные в блоки элементы преобразования и усиления скорости сигнала управляемого объекта, каналы измерения величины, скорости и ускорения выходной переменной которого связаны со входами регулятора, выход которого связан со входом исполнительного привода, выход последнего связан со входом управляемого объекта, имеются следующие отличительные признаки: канал измерения выходной переменной управляемого объекта связан со входом первого блока, формирующего желаемые свойства движения выходной переменной управляемого объекта, а выход первого блока соединен со входом второго блока, формирующего компонент управления, соответствующий упомянутым желаемым свойствам движения, причем канал измерения скорости выходной переменной управляемого объекта связан со входом первого и четвертого блока, формирующего компонент управления, компенсирующий недостатки силового исполнительного привода, канал измерения ускорения выходной переменной которого связан со входом четвертого и третьего блока, формирующего компонент управления, соответствующий фактическому динамическому состоянию управляемого объекта, кроме того, выход исполнительного привода связан также со входом пятого и шестого блока, формирующих соответственно компонент управления, отражающий динамическое состояние исполнительного привода, и компонент управления, компенсирующий ослабление сигнала управления вследствие использования отрицательной обратной связи по выходной переменой исполнительного привода, причем выходы пятого и шестого блоков, так же как и выходы второго, третьего и четвертого блоков, связаны со входом седьмого блока, формирующего из упомянутых выше компонент управления суммарный выходной сигнал, при этом выход седьмого блока связан со входом исполнительного привода.
Конкретное исполнение блоков может иметь следующие отличительные признаки:
первый блок содержит два функциональных преобразователя и пять усилителей, в том числе два интегратора, причем своим входом первый усилитель связан с каналом измерения выходной переменной управляемого объекта, а выходом - со входом первого функционального преобразователя, кроме того, своим входом второй усилитель связан с каналом измерения скорости выходной переменной управляемого объекта, а выходом - со входом второго функционального преобразователя, выход которого, так же как и выход первого функционального преобразователя, связан со входами третьего усилителя, выход которого связан со входом второго блока, при этом выход первого интегратора одновременно связан со входом второго усилителя и входом второго интегратора, выход которого связан со входом первого усилителя;
второй, третий и пятый блоки содержат по два дифференциатора и усилитель, причем выход первого блока, канал измерения ускорения выходной переменной управляемого объекта и выход исполнительного привода связаны со входами усилителей, соответственно второго, третьего и пятого блоков, а также со входом одного из дифференциаторов, выход которого связан со входом другого дифференциатора и входом усилителя, который своим входом также связан с выходом другого дифференциатора, а выходом - со входом седьмого блока;
четвертый и шестой блоки содержат усилитель, причем входы усилителя четвертого блока связаны с каналами измерения скорости и ускорения выходной переменной управляемого объекта, а вход усилителя шестого блока - с выходом исполнительного привода, при этом выходы этих усилителей связаны со входом седьмого блока;
седьмой блок содержит усилитель и два диода, причем своими входами усилитель одноименно связан с выходами второго, третьего, четвертого, пятого и шестого блоков, а также с катодом одного из дисков и анодом другого, кроме того своим выходом усилитель связан одновременно со входом исполнительного привода, а также с катодом диода, упомянутого вторым, и с анодом диода, упомянутого первым.
Формирование на основании командной фактической величин выходной переменной и ее производной сигнала, соответствующего желаемым свойствам движения этой переменной, а также формирование на основании упомянутого сигнала компонента управления, соответствующего этим желаемым свойствам, позволит легко, в доступной форме задавать желаемый критерий качества управления.
Формирование одновременно на базе величины ускорения выходной переменной компонента управления, отражающего фактическое состояние управляемого объекта в каждый момент времени, необходимо для того, чтобы обеспечить адаптивность управления, так как любые внутренние и внешние возмущения отражаются в конечном счете на ускорении выходной переменной.
Формирование на базе выходной переменной исполнительного механизма компонента управления, отражающего фактическое состояние исполнительного механизма, повышает точность работы привода в системе управления.
Формирование на базе выходной переменной исполнительного механизма компонента управления, компенсирующего изменение управляющего сигнала вследствие использования априори введенной отрицательной обратной связи по выходной переменной исполнительного механизма с целью ограничения ее величины, позволит компенсировать влияние этой связи, отрицательно воздействующей на сам процесс управления системами.
Суммирование в каждый момент времени упомянутых полученных компонент, образуя фактические величины управляемой переменной, даст выходной сигнал регулятора, обеспечивающий упомянутые ранее качества.
Формирование на основании выходной переменной, скорости и ускорения исполнительного механизма компонента управления, компенсирующего недостатки исполнительного механизма, позволит повысить точность и быстродействие системы.
Связь канала измерения выходной переменной управляемого объекта со входом первого блока, формирующего желаемые свойства движения выходной переменной управляемого объекта, а также связь выхода этого блока со входом второго блока, формирующего компонент управления, соответствующий упомянутым желаемым свойствам движения, и связь канала измерения скорости выходной переменной управляемого объекта со входами первого и четвертого блока, формирующего компонент управления, компенсирующий недостатки используемого исполнительного привода, а также связь канала измерения ускорения выходной переменной управляемого объекта со входом четвертого и третьего блока, формирующего компонент управления, соответствующий фактическому динамическому состоянию управляемого объекта, позволяет сообщить фактическое динамическое состояние управляемого объекта первому блоку для формирования желаемых свойств движения выходной переменной, а третьему и четвертому блокам - для формирования соответственно компонент управления, обеспечивающих упомянутые свойства.
Недостатками исполнительного привода могут быть, например, присущие используемым силовым исполнительным механизмам свойства: противоЭДС в электроприводе, утечки рабочего тела в гидро- и пневмоприводах. Компенсация этих недостатков, в конечном счете, создает предпосылки для повышения точности и быстродействия регулятора.
Связь выхода исполнительного привода со входом пятого и шестого блоков, формирующих соответственно компонент управления, отражающий динамическое состояние исполнительного привода, и компонент привода, компенсирующий ослабление сигнала управления вследствие использования отрицательной обратной связи по выходной переменной исполнительного механизма для ограничения последнего (причем выходы пятого и шестого блоков, так же как и выходы второго, третьего и четвертого блоков, связаны со входом седьмого блока, формирующего из упомянутых выше компонент управления суммарный выходной сигнал регулятора), а также связь выхода седьмого блока со входом исполнительного привода необходима для получения выходной переменной исполнительного привода, обладающего высокой точностью и быстродействием.
Конкретное выполнение первого блока, содержащего два функциональных преобразователя, пять усилителей, в том числе, два интегратора, с упомянутыми выше связями, позволит формировать в каждый момент времени желаемые свойства движения выходной переменной минимальным количеством элементов автоматики.
Конкретное выполнение второго, третьего и пятого блоков, содержащих по два дифференциатора и усилитель, с приведенными выше связями, направлено на формирование компонент выходного сигнала седьмым блоком тоже минимальными количеством элементов.
Конкретное выполнение четвертого и шестого блоков, содержащих усилители с упомянутыми выше связями, необходимы для формирования компонента управления, соответствующего недостаткам исполнительного привода, а также компонента управления, компенсирующего априори введенную отрицательную обратную связь по выходной переменной исполнительного привода. Данные свойства устройства способствуют расширению его функциональных возможностей и повышению качества работы.
Конкретное выполнение седьмого блока, служащего для формирования упомянутого суммарного сигнала и содержащего усилитель и два диода с упомянутыми выше связями, направлено на суммирование выходных сигналов с выходов второго, третьего, четвертого, пятого и шестого блоков и ограничение, при необходимости, минимальной и максимальной величин упомянутого суммарного сигнала. Это позволит также повысить универсальность использования устройства с привлечением минимального количества элементов электроники.
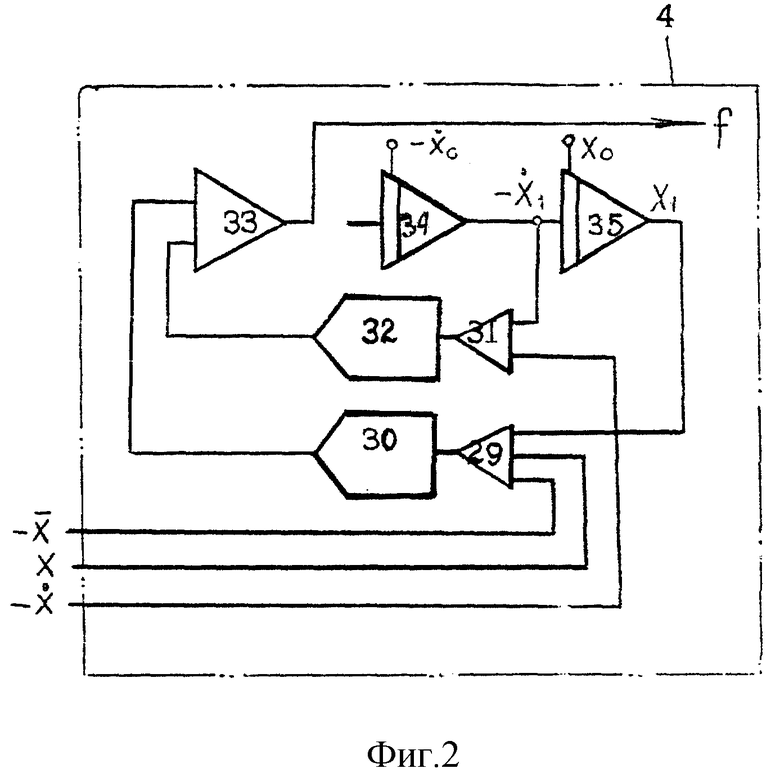
Сущность заявляемого изобретения поясняется иллюстрациями. На фиг. 1 представлена функциональная схема регулятора, соединенного с управляемым объектом через исполнительный привод. Для упрощения пояснений показана одноканальная система. На фиг. 2 показана функциональная схема конкретного выполнения первого блока регулятора.
Регулятор 1, воздействующий через исполнительный привод 2 на управляемый объект 3, включает в себя объединенные в блоки 4 - 10, элементы преобразования и усиления выходной переменной объекта управления и ее производных. Информация на регулятор поступает через измерительные каналы 3а - 3в.
Канал 3а служит для измерения выходной переменной x объекта управления, а каналы 3б и 3в - для измерения соответственно скорости  и ускорения
и ускорения  выходной переменной. Эти каналы связаны со входами блоков 4 - 7 регулятора 1. Причем канал 3а связан со входом 4а блока 4, выход 4б которого служит для передачи выходного сигнала f функционального преобразователя 11 блока 4 на вход 5а блока 5. Канал 3б связан со входом 4в блока 4 и входом 7а блока 7. Канал 3в связан со входом 6а блока 6 и входом 7б блока 7.
выходной переменной. Эти каналы связаны со входами блоков 4 - 7 регулятора 1. Причем канал 3а связан со входом 4а блока 4, выход 4б которого служит для передачи выходного сигнала f функционального преобразователя 11 блока 4 на вход 5а блока 5. Канал 3б связан со входом 4в блока 4 и входом 7а блока 7. Канал 3в связан со входом 6а блока 6 и входом 7б блока 7.
Выход 2а привода 2 соединен со входом 3г объекта 3. Он связан также со входами 8а и 9а соответственно блоков 8 и 9.
Выходы 5б, 6б, 7в, 8б и 9б блоков 5 - 9 служат для передачи преобразованных сигналов выходной переменной и ее производных, а также выходной переменной исполнительного механизма z, в виде компонент управления u1 - u5 на входы блока 10, который через свой выход 10б связан со входом 2б исполнительного привода 2.
Блок 4 необходим для формирования желаемых движений f выходной переменной управляемого объекта.
Блок 5 предназначен для формирования компонента u1 управления, соответствующего желаемому динамическому состоянию управляемого объекта 3 в каждый момент времени.
Блок 6 служит для формирования на основе фактической величины ускорения выходной переменной компонента u2 управления, отражающего фактическое динамическое состояние управляемого объекта 3 в каждый момент времени.
Блок 7 необходим для формирования на основе фактических величин скорости  и ускорения
и ускорения  выходной переменной компонента u3 управления, отражающего недостатки используемого исполнительного механизма привода 2.
выходной переменной компонента u3 управления, отражающего недостатки используемого исполнительного механизма привода 2.
Блок 8 служит для формирования на основе фактической величины выходной переменной z исполнительного привода 2 компонента u4 управления, отражающего динамическое состояние исполнительного привода 2 в каждый момент времени.
Блок 9 необходим для формирования на основе фактической величины выходной переменной z исполнительного привода компонента u5 управления, если в исполнительный привод априори вводится отрицательная обратная связь для ограничения величины выходной переменной исполнительного механизма.
Блок 10 предназначен для формирования результирующего выходного сигнала регулятора 1.
Для выполнения своих функций блок 5 снабжен двумя дифференциаторами 12, 13 и усилителем 14; блок 6 снабжен двумя дифференциаторами 15, 16 и усилителем 17; блок 8 снабжен двумя дифференциаторами 19, 20 и усилителем 21.
В блоках 5 и 6 некоторые выходные сигналы дифференциаторов 12, 13 и 15, 16 могут исключаться путем выбора соответствующих коэффициентов передач усилителей 14 и 17. Аналогично, в блоке 7 выходной сигнал, связанный с ускорением, может исключаться путем выбора соответствующего коэффициента передачи усилителя 18, а в блоке 8 некоторые выходные сигналы дифференциаторов 19 и 20 могут исключаться путем выбора соответствующих коэффициентов передач усилителя 21.
Блок 9 включает в себя усилитель 22.
Блок 10 состоит из усилителя 23. Выходной сигнал этого усилителя ограничивается диодами 24. Некоторые из компонент управления, образующих суммарный выходной сигнал регулятора, могут исключаться путем выбора соответствующего коэффициента передачи усилителя 23.
Исполнительный привод 2 представлен укрупненно в виде одного блока 25. Он может состоять, например, из преобразователя и исполнительного механизма. Так, электрический привод в этом случае включает тиристорный преобразователь и электродвигатель (исполнительный механизм). Гидропривод может состоять из золотникового распределителя и гидродвигателя (исполнительный механизм).
Управляемый объект 3 для пояснений принципа работы представлен в виде трех последовательно соединенных элементов: функционального преобразователя 26 и двух интеграторов 27 и 28.
Вариант исполнения блока 4 представлен на фиг. 2. Он содержит два функциональных преобразователя, пять усилителей, в том числе, два интегратора. Причем своим входом усилитель 29 связан с каналом 3а, а выходом - со входом первого функционального преобразователя 30. Кроме того, своим входом второй усилитель 31 связан с каналом 3б, а выходом - со входом второго функционального преобразователя 32, выход которого, также как и вход функционального преобразователя 30, связан со входами 33. Выход усилителя 33 связан со входом 5а блока 5. При этом выход интегратора 34 одновременно связан со входом усилителя 31 и входом интегратора 35, выход которого связан со входом усилителя 29. На интеграторах 35 и 34 устанавливают начальные значения  и x0 соответственно скорости выходной переменной и ее ускорения.
и x0 соответственно скорости выходной переменной и ее ускорения.
Регулятор 1 может быть реализован либо в виде набора аналоговых элементов, либо в цифровом исполнении.
Регулятор работает следующим образом.
Перед эксплуатацией регулятора 1 осуществляется адаптация блока 4 к заданным свойствам движения выходной переменной управляемого объекта 3. Это производится путем настройки функциональных преобразователей 30 и 32. Например, путем настройки функционального преобразователя 32 на осуществление заданных диссипативных свойств, а функционального преобразователя 30 - на обеспечение желаемых частотных свойств при обработке системой постоянного командного сигнала.
Коэффициенты передач усилителей 14, 17, 18, 21, 22, 23, 29, 31 и 33, а также начальные условия  и x0 на интеграторах 34 и 35, предварительно настраиваются на конкретные значения, соответствующие желаемым свойствам движения выходной переменной управляемого объекта, а также свойствам привода 2 и объектива 3. Причем, интеграторы 34 и 35 используются только в одноактных системах управления (например, типа "взлет - посадка" и т.д.). В других случаях начальные условия
и x0 на интеграторах 34 и 35, предварительно настраиваются на конкретные значения, соответствующие желаемым свойствам движения выходной переменной управляемого объекта, а также свойствам привода 2 и объектива 3. Причем, интеграторы 34 и 35 используются только в одноактных системах управления (например, типа "взлет - посадка" и т.д.). В других случаях начальные условия  и x0 принимаются нулевыми.
и x0 принимаются нулевыми.
После подключения регулятора 1 к конкретному управляемому объекту 3 через привод 2, усилитель 33 непрерывно формирует выходной сигнал f, соответствующий желаемым свойствам движения выходной переменной управляемого объекта на основании выходных сигналов функциональных преобразователей 30 и 32.
Желаемые свойства движения выходной переменной управляемого объекта 3 осуществляются следующим образом. На усилитель 29 подается командная величина  выходной переменной, а также наблюдаемые в режиме нормального функционирования объекта 3 (либо идентифицируемые) выходная переменная ее скорость (x и
выходной переменной, а также наблюдаемые в режиме нормального функционирования объекта 3 (либо идентифицируемые) выходная переменная ее скорость (x и  ).
).
Блок 5 функционирует следующим образом. Выходной сигнал блока 4 подается на вход дифференциатора 12 и усилителя 14. Выходной сигнал дифференциатора 12 подается на вход усилителя 14 и дифференциатора 13. Выходной сигнал последнего подается также на вход усилителя 14, который в каждый момент времени формирует компонент управления, соответствующий желаемым свойствам движения выходной переменной управляемого объекта.
Блок 6 функционирует так. На вход дифференциатора 15 и усилителя 17 подается ускорение выходной переменной управляемого объекта. Выходной сигнал дифференциатора 15 подается на вход усилителя 17 и дифференциатора 16. Выходной сигнал последнего подается также на вход усилителя 17, который формирует компонент управления, соответствующий фактическому динамическому состоянию управляемого объекта.
Блок 7 функционирует следующим образом. Скорость и ускорение выходной переменной управляемого объекта подаются на входы усилителя 18, который формирует компонент управления, компенсирующий недостатки используемого в силовом приводе исполнительного механизма.
Блок 8 работает так. Выходная переменная исполнительного привода подается на вход усилителя 21 и дифференциатора 19. Выходной сигнал последнего подается на входы усилителя 21 и дифференциатора 20. Выходной сигнал последнего также подается на вход усилителя 21, который формирует компонент управления, соответствующий динамическому состоянию исполнительного привода.
В процессе работы системы управления с регулятором 1 непрерывно наблюдается выходная переменная z исполнительного привода 2, которая используется в блоках 8 и 9.
На основании поданных сигналов блоки 5 - 9 формируют соответствующие компоненты u1 - u5 управляющего сигнала. Усилитель 23 на основе этих компонент формирует суммарный выходной сигнал регулятора u. Последний является входным для привода 2, который, преобразуя и усиливая этот сигнал, благодаря связи с объектом 3, придает управляемому объекту предписанные свойства движения. При этом знания уравнений движения управляемой системы не требуется, т. е. не требуется использовать в системе определенную структуру функционального преобразователя 26 и параметры интегратора 27 и 28. Моделирование управляемого процесса осуществляется самой системой в ее естественном движении. Требуется лишь наблюдать фактические величины управляемой переменной x, ее скорость  и ускорение
и ускорение  Используемые в регуляторе 1 переменные либо наблюдаются в режиме нормального функционирования управляемого объекта и привода, либо идентифицируются.
Используемые в регуляторе 1 переменные либо наблюдаются в режиме нормального функционирования управляемого объекта и привода, либо идентифицируются.
Предлагаемый способ обеспечивает оптимальность переходных процессов при осуществлении назначенных траекторий движений и поэтому является эффективным средством достижения цели в управляемых системах, функционирование которых сопровождается переходными процессами. Универсальность его использования выражается в возможности варьировать как виды решаемых задач (стабилизация, слежение, виброзащита и т.д.), так и желаемые свойства движения управляемой системы, а также ограничения исполнительных механизмов привода 2.
Предлагаемый для осуществления этого способа регулятор обеспечивает оптимальность переходных процессов при осуществлении назначенных траекторий движения и поэтому является эффективным средством достижения цели в управляемых системах, функционирование которых сопровождается переходными процессами. Универсальность его использования выражается в возможности варьировать как виды решаемых задач (стабилизация, слежение, виброзащита и т.д.), так и желаемые свойства движения управляемого объекта, а также ограничения исполнительных механизмов привода 2. Заявляемое устройство является многоцелевым регулятором нового поколения, обеспечивающим адаптивное управление. Он позволяет совместить высокую точность и быстродействие путем использования нелинейных встроенных свойств движения.
Источники информации
1. Автоматика и автоматизация мобильных сельскохозяйственных машин. /Носов Г.Р. и др. - К.: Вища шк., 1984, с. 171, фиг. 3.31.
2. Средства автоматики и телемеханики. /Бохан Н.И. и др. - Минск: 1992, с. 247 - 249, 266 - 274, фиг. 7.12 и фиг. 7.20 - 7.26 (прототип)я
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2406620C2 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2103191C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ТОРМОЗНОГО МОМЕНТА | 1997 |
|
RU2131365C1 |
| Устройство для воспроизведения запаздывающих функций | 1985 |
|
SU1545233A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1997 |
|
RU2125517C1 |
| Устройство для управления системой виброзащиты сиденья транспортного средства | 1982 |
|
SU1025540A1 |
| Система управления активными подвесками многоосного транспортного средства | 1983 |
|
SU1150103A1 |
| Автомат-стабилизатор | 1982 |
|
SU1049271A1 |
Изобретение относится к автоматике и может быть использовано для управления силовыми приводами. Технический результат заключается в повышении эффективности способа автоматического управления и достигается за счет того, что моделирование управляемого процесса осуществляется самой системой в ее естественном движении. При этом наблюдаются фактические величины выходной переменной и ее производные: скорость и ускорение. 2 ил.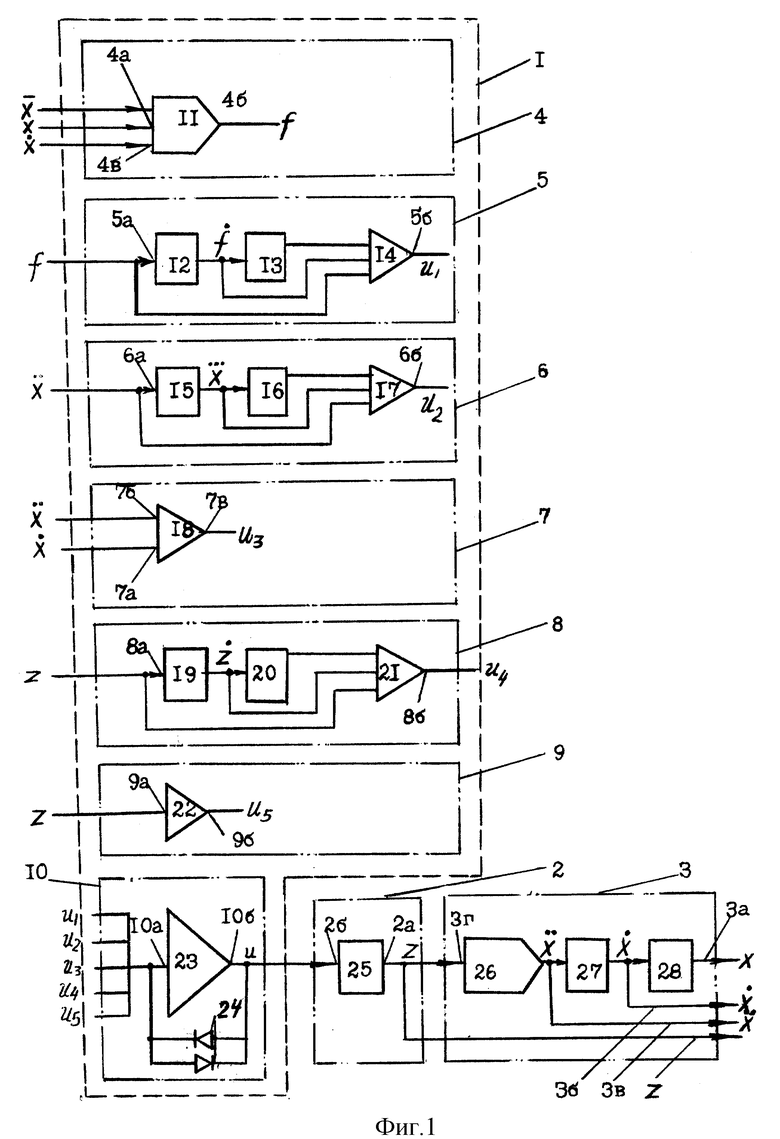
Способ автоматического управления системами, при котором выходную переменную исполнительного механизма подают на вход управляемого объекта, измеряют фактическую величину выходной переменной управляемого объекта, которую вместе с величиной выходной переменной исполнительного механизма и командной величиной выходной переменной управляемого объекта используют для формирования управляющего сигнала, который подают на вход исполнительного механизма, причем дополнительно используют отрицательную обратную связь по выходной переменной исполнительного механизма, отличающийся тем, что измеряют скорость изменения фактической величины выходной переменной управляемого объекта и подают ее на вход блока формирования желаемых свойств движения выходной переменной управляемого объекта вместе с фактической величиной выходной переменной управляемого объекта и величиной выходной переменной исполнительного механизма, с выхода блока формирования желаемых свойств движения выходной переменной управляемого объекта сигнал подают на вход блока формирования компонента управляющего сигнала, соответствующего желаемым свойствам движения выходной переменной управляемого объекта, причем одновременно измеряют ускорение изменения фактической величины выходной переменной управляемого объекта и подают его на вход блока формирования компонента управляющего сигнала, отражающего фактическое динамическое состояние управляемого объекта в каждый момент времени, кроме того, величину выходной переменной исполнительного механизма подают на вход блока формирования компонента управляющего сигнала, отражающего фактическое состояние исполнительного механизма, величину выходной переменной исполнительного механизма подают на вход блока формирования компонента управляющего сигнала, компенсирующего ослабление управляющего сигнала вследствие введения отрицательной обратной связи по выходной переменной исполнительного механизма, при этом измеренные скорость и ускорение изменения фактической величины выходной переменной управляемого объекта подают на вход блока формирования компонента управляющего сигнала, компенсирующего недостатки исполнительного механизма, после чего упомянутые полученные компоненты суммируют в каждый момент времени, образуя фактические величины управляющего сигнала.
| ЛЬВОВ Н.С | |||
| и др | |||
| Автоматика и автоматизация сварочных процессов | |||
| - М.: Машиностроение, 1982, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| RU 95107819 A1, 10.02.1997 | |||
| US 4935886 A, 19.06.1990 | |||
| US 4555756 A, 26.11.1975. | |||
