Изобретение относится к управлению систем управления, а именно к системам управления объектом вида
СО U
(1)
где
Ц) СО,
b(f) - управление; G), (P - соответственно скорость и угол поворота объекта. Цель изобретения - повысить одновременно запас устойчивости и качество переходного процесса.
Для обеспечения устойчивости системы необходимо выбрать управление на основе второго метода Ляпунова, т.е. обеспечения отрицательности производной функции Ляпунова:
VЈ 0 .(2)
„ .Ч
п+
(п+1) СО
С этой целью выбирают функцию Ляпунова в виде
v Мс,Г (3)
К const 0; n 0 целое и дробное,
Но для апериодичности переходного процесса обеспечивается не неравенство (2) , а равенство вида
V - (UV, |U const 0. (4) Из (3) и (4) можно записать К (n+1) If (n-H)U U
,,5)
откуда находят управление Мп+рЩ cjsign Ч (,,)
05
oo со со J
ОЭ
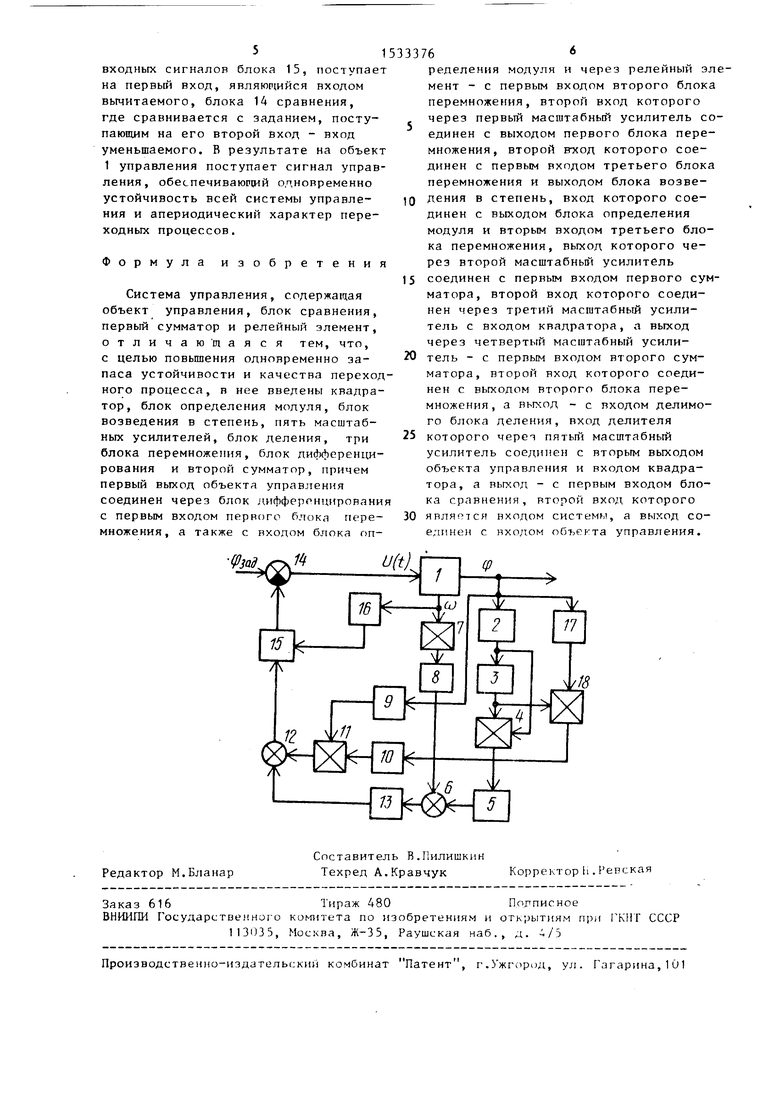
На чертеже предстагшена функцио- налъная схема системы управления. Предлагаемая система реализует управление объектом 1 в соответствии с выражением (6).
Система содержит объект 1 управления, первый выход которого является выходом системы и соединен с входом блока 2 определения модуля, выход ко- торого соединен с входом блока 3 возведения в степень и вторым входом третьего блока 4 перемножения, первый вход которого соединен с выходом блока 3, а выход через второй масштаб ный усилитель 5 - с первым входом первого сумматора 6, второй выход объекта 1 и системы соединен с входом квадратора 7, выход которого через третий масштабный усилитель 8 соединен с вторым входом сумматора 6, первый выход объекта 1 соединен также с релейным элементом 9, выход первого масштабного усилителя 10 соединен с вторым входом второго блока 11 перемножения, первый вход которого соединен с выходом релейного элемента 9, а выход - с вторым входом второго сумматора 12, первый вход которого через четвертый масштабный усилитель 13 соединен с выходом сумматора 6, вход уменьшаемого блока 14 сравнения является входом системы, выход которого соединен с входом объекта 1 управления, а вход вычитаемого - с выходом блока 15 деления, вход делимого которого соединен с вы- ходом второго сумматора 12, а вход делителя через пятый масштабный усилитель 16 - с вторым выходом объекта 1, первый выход которого соединен через блок 17 дифференцирования с первым входом первого блока 18 перемножения, второй вход которого соединен с выходом блока 3, а выход - с входом усилителя 10.
Система работает следующим образом С объекта 1 управления сигналы, соответствующие угловой скорости и углу поворота, поступают соответственно на релейный элемент 9, блок 2 определения модуля, блок 17 дифференцирования и пятый масштабный усилитель 16, квадратор 7. На релейном элементе 9 в зависимости от знака входного сигнала на выходе формируется сигнал signcp , который поступает на второй вход блока 11 перемножения. В блоке 2 определения модуля на выходе формиру
0
, 5
5
0
ется сипмм, по абсолютной величине равный входному. В блоке 17 входной сигнал дифференцируется и с выхода поступает на второй вход бпока 18 перемножения.
С выхода блока 2 определения модуля сигнал поступает на первый вход третьего блока 4 перемножения и на вход блока 3 возведения в степень, в котором формируется сигнал, соответствующий заданной степени модуля угла поворота. В блоке 4 перемножения выходной сигнал блока 3 перемножается с выходным сигналом блока 2 и на выходе формируется сигнал, соответствующий (п+1) степени модуля угла поворота , который, проходя через второй масштабный усилитель 5 на первый вход первого сумматора 6, усиливается в К, раз.
В блоке 18 перемножения выходной сигнал блока 3 перемножается с выходным сигналом блока 17 и на выходе формируется сигнал, соответствующий ц |lpln, который после усиления в первом масштабном усилителе 10 в К, (п+1) раз поступает на второй вход второго блока 11 перемножения, где перемножается с выходным сигналом релейного элемента 9. Сигнал, соответствующий К, (n+Olq)) q signq, поступает на второй вход второго сумматора 12. В квадраторе 7 входной сигнал, пропорциональный угловой скорости СО, перемножается сам на себя - возводит-- ся в квадрат, и сформированный таким образом выходной сигнал, пропорциональный квадрату угловой скорости со усиливается в третьем масштабном
п+1
раз и поступает на
усилителе 8 в
второй вход сумматора 6.
В сумматоре 6 этот сигнал суммируется с сигналом, соответствующим K,|(J|nM , с усилителя 5 и после усиления в четвертом масштабном усилителе 13 в /К раз поступает на первый вход второго сумматора 12. В последнем этот сигнал суммируется с сигналом, соответствующим К ,(n+1 ) | q |n к Ц sign(fl, с блока 11 и поступает на вход делимого блока 15 деления. В пятом масштабном усилителе 16 сигнал, соответствующий угловой скорости U)jусиливается в (п+1) раз и поступает на вход делителя блока 15 деления. Выходной сигнал блока, соответствующий частному от деления
входных сигналов блока 15, поступает на первый вход, являющийся входом вычитаемого, блока 14 сравнения, где сравнивается с заданием, поступающим на его второй вход - вход уменьшаемого. В результате на объект 1 управления поступает сигнал управления, обеспечивающий одновременно устойчивость всей системы управле- ния и апериодический характер переходных процессов.
Формула изобретения
Система управления, содержащая объект управления, блок сравнения, первый сумматор и релейный элемент, отличающаяся тем, что, с целью повышения одновременно запаса устойчивости и качества переходного процесса, в нее введены квадратор, блок определения модуля, блок возведения в степень, пять масштабных усилителей, блок деления, три блока перемножения, блок дифференцирования и второй сумматор, причем первый выход объекта управления соединен через блок дифференцировани с первым входом первого блока пере- множения, а также с входом блока оп
0
5
5
ределення модуля и через релейный элемент - с первым входом второго блока перемножения, второй вход которого через первый масштабный усилитель соединен с выходом первого блока перемножения, второй в-ход которого соединен с первым входом третьего блока перемножения и выходом блока возведения в степень, вход которого соединен с выходом блока определения модуля и вторым входом третьего блока перемножения, выход которого через второй масштабный усилитель соединен с первым входом первого сумматора, второй вход которого соединен через третий масштабный усилитель с входом квадратора, а выход через четвертый масштабный усилитель - с первым входом второго сумматора, второй вход которого соединен с выходом второго блока перемножения, а выход - с входом делимого блока деления, вход делителя которого через пятый масштабный усилитель соединен с вторым выходом объекта управления и входом квадратора, а выход - с первым входом блока сравнения, второй вход которого является входом системы, а выход соединен с входом объекта управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля | 1979 |
|
SU817880A1 |
| Система автоматического регулирования | 1985 |
|
SU1265694A1 |
| Измеритель частоты гармонического сигнала | 1983 |
|
SU1160327A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1980 |
|
SU1023281A2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ ДЛЯ ОБЕСПЕЧЕНИЯ УСТОЙЧИВОЙ РАБОТЫ СЛОЖНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2011 |
|
RU2475828C1 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| ИЗМЕРИТЕЛЬ ПЛОЩАДИ МЕТАЛЛИЗАЦИИ | 2001 |
|
RU2230290C2 |
| Устройство для автоматического управления роботом-манипулятором | 1986 |
|
SU1403016A1 |
| Устройство для управления приводом робота | 1985 |
|
SU1405023A1 |
Изобретение относится к области управления систем управления, а именно к системам управления объектом вида СО U , СР W , где L (t) - управление,со , Lf - соответственно скорость и угол поворота объекта. Цель изобретения - повысить одновременно запас устойчивости и качество переходного процесса. Изобретение содержит объект управления, блок сравнения, два сумматора, релейный элемент, квадратор, блок определения модуля, блок возведения в степень, пять масштабных усилителей, блок деления, три блока перемножения и блок дифференцирования с соответствующими взаимосвязями. 1 ил.
| Боднер В А.Теория автоматического управления полетом.-М.: Наука, 1964, с.147-152, рис.3.19. |
