Заявляемое изобретение относится к технике акустических нашлемных систем позиционирования и может быть применено в устройствах, где используются данные о трех координатах положения и трех углах ориентации головы оператора, преимущественно в нашлемных системах целеуказания и индикации летательных аппаратов, в системе управления прожектором вертолета, в авиа- и автотренажерах, в системах виртуальной реальности.
Наиболее близким к заявляемому изобретению по технической сущности является способ компенсации погрешностей измерения координат, примененный в патенте (см. RU №2357184, F41G 3/22, 27.05.2009) и в патенте (см. RU №2449242, G01B 04/27, 27.04. 2012, «Ультразвуковая нашлемная система позиционирования», принятом за прототип.
В прототипе используется дальномерный метод определения координат ультразвуковых приемников, размещенных на шлеме оператора, благодаря измерению расстояний между базовыми ультразвуковыми излучателями, размещенными в кабине летательного аппарата (ЛА) с известными координатами в связанной с ЛА системой координат, и ультразвуковыми приемниками, размещенными на шлеме. Для решения навигационной задачи определения координат нашлемных приемников в прототипе измеряют расстояния от каждого излучателя в кабине ЛА до каждого нашлемного приемника и до приемника корректирующего канала.
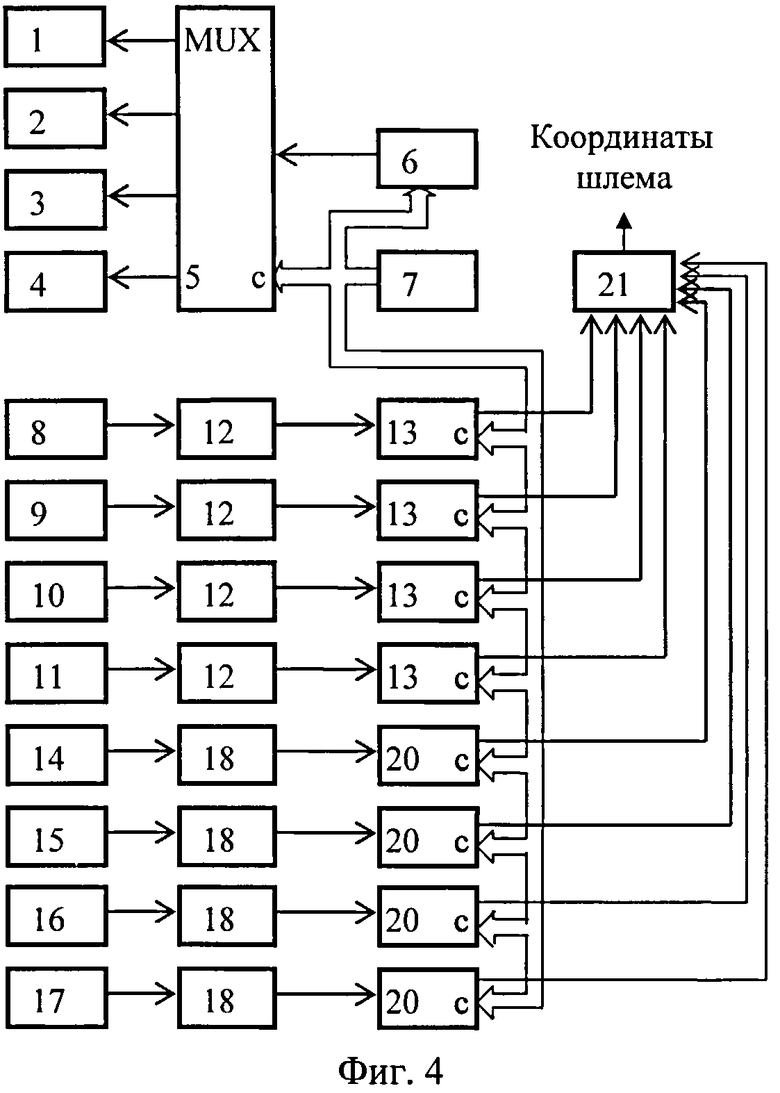
Работа прототипа ультразвуковой нашлемной системы позиционирования (УЗНСП) поясняется структурной схемой, приведенной на фиг. 1, где обозначены:
1, 2, 3, 4 - ультразвуковые излучатели;
5 - мультиплексор;
6 - формирователь сигнала;
7 - синхронизатор;
8, 9, 10, 11 - ультразвуковые нашлемные приемники;
12 - ультразвуковой приемник корректирующего канала;
13 - усилитель сигналов нашлемных приемников с АРУ;
14 - измеритель времени задержки сигналов нашлемных приемников;
15 - усилитель сигналов корректирующего канала;
16 - измеритель времени задержки сигналов корректирующего канала;
17 - бортовой вычислитель.
Каналы, содержащие измерители 14, будем называть измерительными, а канал, содержащий измеритель 16, корректирующим.
Ультразвуковые излучатели 1-4 размещены в кабине над шлемом пилота в разнесенных точках с известными координатами в связанной системе координат, нашлемные ультразвуковые приемники 8-11 размещены крестообразно в реперных точках, ультразвуковой приемник 12 корректирующего канала жестко закреплен в непосредственной близости от шлема пилота с известными расстояниями r[i] до каждого i-го излучателя. Ультразвуковые излучатели 1…4, возбуждаемые формирователем сигналов 6 через мультиплексор 5, поочередно излучают ультразвуковые сигналы каждый в течение интервала ТП, определяемым синхронизатором 7. Это дает возможность идентифицировать номер излучателя, сигналы которого принимаются всеми приемниками на данном интервале времени.
Для решения навигационной задачи - определения координат нашлемных приемников - в каждый интервал времени ТП измеряют задержки распространения ультразвуковых волн (УЗВ) от активного в этом периоде излучателя до всех нашлемных приемников 8…11 и приемника корректирующего канала 12.
Система работает следующим образом. Синхронизатор 7 выдает синхроимпульсы в виде двухразрядного числа с периодом повторения ТП, которое циклически меняется от периода к периоду, пробегая значения 00, 01, 10, 11. Формирователь сигналов 6 генерирует фазоманипулированные сигналы вида (+-) или (-+) в зависимости от четности поступающего на него синхросигнала. Эти же синхросигналы переключают мультиплексор 5. В результате ультразвуковые излучатели 1, 2, 3 и 4 излучают сигналы поочередно, со сдвигом ТП и соответствующим чередованием фаз, а нашлемные приемники 8…11 и приемник корректирующего канала 12 в течение интервала наблюдения принимают сигнал активного излучателя.
В прототипе используется способ компенсации возможного изменения скорости распространения УЗВ при изменении температуры, давления или наличия воздушных потоков в кабине ЛА и изменения координат излучателей в кабине, вызванных вибрацией стенок кабины ЛА, состоящий в том, что время пробега УЗВ от излучателя до нашлемного приемника корректируется с помощью дополнительного корректирующего канала, который измеряет времена пробега УЗВ TKK[i] от каждого i-го излучателя до неподвижно закрепленного в кабине ЛА приемника корректирующего канала (ПРМКК), расположенного вблизи шлема оператора. Расстояния r[i] между i-м излучателем и ПРМКК известны в процессе монтажа системы или могут быть измерены ультразвуковым методом в любое время.
Ниже приводится описание способа компенсации погрешностей измерения координат объекта, принятый в прототипе.
Расстояние R[i.j] между j-м приемником и i-м излучателем находится как произведение времени пробега УЗВ T[i,j] между ними на скорость УЗВ. Скорость УЗВ νi определяется из измерений в корректирующем канале для каждого излучателя:
νi=r[i]/TKK[i].
Далее по данным о временных задержках в корректирующем и измерительных каналах рассчитываются расстояния от каждого нашлемного приемника до каждого излучателя по формуле:
R[i,j]=T[i,j]r[i]/TKK[i].
Очевидно, последнее выражение учитывает изменения скорости УЗВ, связанные с температурой, давлением, так как TKK[i] несет в себе информацию о скорости УЗВ с учетом радиальной скорости воздушных потоков в кабине ЛА. Расположение приемника корректирующего канала ПРМКК в непосредственной близости от шлема оператора дает возможность компенсировать влияние вибраций на точность измерений, так как времена T[i,j] и TKK[i] при вибрации изменяются синхронно и пропорционально.
Расчет координат нашлемных приемников, а по ним линейных и угловых координат шлема производится в бортовом вычислителе 17.
Приведем подробное описание способа коррекции вибрации излучателей, принятого в прототипе. Описание поясняется фиг. 2, где обозначено:
А - амплитуда вибраций излучателя;
Ri - расстояние от шлема до i-го неподвижного излучателя;
r1 - расстояние от ПРМКК до i-го неподвижного излучателя;
dri - приращение расстояния ri за счет вибрации;
dri - приращение расстояния Ri за счет вибрации;
γш - угол между направлением вибрации и направлением на шлем;
γ - угол между направлением вибрации и направлением на ПРМКК.
Запишем приращения измеряемых расстояний с учетом A<<ri,Ri как:
dri≈A·cosγ=dRi(cosγ/cosγш)
dRi≈A·cosγш=dri·(cosγш/cosγ)
При обработке принятых сигналов в бортовом вычислителе 17 вычисляются расстояния R[i,j] между ИЗЛ и ПРМ как R[i,j]=T[i,j]·νi, где: νi=(ri+dri)/TKK[i] - скорость УЗВ, измеренная в корректирующем канале, TKK[i] - время распространения УЗВ в корректирующем канале, T[i,j] - время распространения УЗВ в измерительном канале. Здесь i - номер излучателя, j - номер нашлемного приемника.
Таким образом, задержка сигналов в измерительных каналах 14 определяется как:
T[i,j]=TKK[i](Ri+dRi)/(ri+dri)=TKK[i](Ri/ri)(1+dRi/Ri)/(1+dri/ri)≈TKK[i](Ri/ri), т.к. разумно считать (1+dRi/Ri)/(1+dri/ri)≈1.
Последнее равенство выполняется точно при условии:
Связь истинного расстояния с измеренными временами распространения УЗВ дается выражением:

или, после небольших преобразований:

Первое слагаемое в (1), (2) не зависит от наличия вибрации, остальные описывают ее влияние. Хорошо видно ослабление влияния вибрации на точность определения Ri за счет ее компенсации в корректирующем канале. Одновременно (2) показывает, что компенсация вибрации будет полной при выполнении условия γ≈γш. В то же время Ri определяется отношением времени пролета УЗВ в измерительном канале к времени пролета в корректирующем канале. Поскольку условия распространения УЗВ в обоих каналах одинаковы, тем самым исключаются влияние внешних условий на точность определения Ri.
Однако для полной компенсации влияния вибрации и движения воздуха в кабине необходимо, чтобы приемник корректирующего канала ПРМКК располагался в центре шлема оператора, при котором выполняется условие γ≈γш, что, конечно, невозможно. Поэтому указанная компенсация осуществляется не полностью, а лишь частично. Это является недостатком прототипа.
В патенте (см. RU 2357184, F41G 3/22, 27.05.2009, «Способ определения линейных и угловых координат шлема оператора в кабине летательного аппарата и ультразвуковая нашлемная система для его осуществления») отмечена возможность использования двух приемников корректирующего канала, расположенных симметрично относительно шлема, так что их виртуальный фазовый центр совпадает с центром шлема. Однако движение головы пилота нарушает условие симметрии приемников относительно шлема, что является недостатком предложенного в этом патенте решения.
Задачей настоящего изобретения является увеличение степени компенсации вибраций, нестабильности скорости звука и движения воздуха в кабине ЛА.
Технический результат заключается в повышении точности определения координат шлема оператора в условиях вибрации и изменяющихся внешних условиях.
Поставленная задача с достижением упомянутого выше результата решается тем, что в способе определения линейных и угловых координат шлема оператора в кабине летательного аппарата по координатам размещенных на шлеме ультразвуковых приемников, в кабине ЛА размещают не менее трех ультразвуковых излучателей с известными координатами в связанной с ЛА системе координат, при этом на краях рабочей зоны возможных положений шлема противоположно в поперечном и продольном направлениях размещают четыре ультразвуковых приемника корректирующих каналов с известными расстояниями до каждого ультразвукового излучателя, осуществляют излучение и прием импульсных ультразвуковых сигналов, измеряют время задержки сигналов от каждого ультразвукового излучателя до каждого нашлемного ультразвукового приемника и до каждого ультразвукового приемника корректирующих каналов, рассчитывают координаты шлема с использованием скорости звука, измеренной в одном любом корректирующем канале, находят направление, ближайшее к направлению на шлем из направлений от излучателя к корректирующим приемникам и к центру рабочей зоны положений шлема и рассчитывают расстояния от каждого нашлемного ультразвукового приемника до каждого ультразвукового излучателя с учетом скорости звука в найденном направлении, по которым определяют координаты шлема оператора.
Описание устройства для осуществления способа приведем для случая четырех излучателей, размещенных в кабине летательного аппарата и четырех нашлемных приемников.
Поставленная задача в системе достигается тем, что ультразвуковая нашлемная система позиционирования, включающая вычислитель и содержащая четыре ультразвуковых излучателя, размещенных в кабине над шлемом оператора в разнесенных точках с известными координатами в связанной с кабиной системе координат, четыре нашлемных ультразвуковых приемника, размещенных в реперных точках, четыре корректирующих канала с четырьмя ультразвуковыми приемниками, размещенными противоположно на краях рабочей зоны положений шлема пилота с известными расстояниями до каждого ультразвукового излучателя, мультиплексор, формирователь сигналов, синхронизатор, четыре усилителя сигналов нашлемных приемников с АРУ, четыре измерителя времени задержки сигналов нашлемных приемников, четыре усилителя сигналов корректирующих каналов и четыре измерителя времени задержки сигналов корректирующих каналов, при этом выход синхронизатора соединен с входами синхронизации: мультиплексора, всех измерителей времени задержки сигналов нашлемных приемников, измерителя времени задержки сигналов корректирующего канала, формирователя сигналов, выход которого соединен с сигнальным входом мультиплексора, раздельные выходы которого соединены с ультразвуковыми излучателями, выходы нашлемных ультразвуковых приемников соединены через усилители сигналов нашлемных приемников с АРУ с сигнальными входами измерителей времени задержки сигналов нашлемных приемников, выходы которых соединены с входами информационных данных вычислителя, выходы ультразвуковых приемников корректирующих каналов соединены через усилители сигналов корректирующего канала с сигнальными входами измерителей времени задержки сигналов корректирующих каналов, выходы которых соединены с входом данных вычислителя, выход которого является выходом устройства (фиг. 4).
Изобретение иллюстрируется чертежами, на которых изображено:
на фиг. 1 - структурная электрическая схема прототипа;
на фиг. 2 - рисунок, поясняющий способ коррекции погрешностей в прототипе;
на фиг. 3 - рисунок, поясняющий способ коррекции погрешностей в заявляемой системе;
на фиг. 4 - структурная электрическая схема заявляемой системы.
Заявляемый способ коррекции погрешностей измерения координат шлема оператора иллюстрируется рисунком фиг. 3, на котором обозначено:
А - амплитуда вибрации излучателя;
R1 - текущее расстояние от излучателя до ПРКК1;
R2 - текущее расстояние от излучателя до ПРКК2;
RM - текущее расстояние от излучателя до середины соединяющей ПРКК1 и ПРКК2 линии (на рисунке - медиана треугольника);
R - текущее расстояние от излучателя до шлема;
ПРККХ, ПРКК2, ПРКК3, ПРКК4 - ультразвуковые приемники корректирующих каналов. Чтобы не загромождать рисунок, линии расстояний R3, R4 от излучателя до приемников ПРКК3, ПРКК4 не показаны.
Обозначим через T[i,j] время задержки сигнала от i-го излучателя до j-го нашлемного приемника, а через R[i,j] - соответствующее задержке расстояние.
Скорость звука в корректирующих каналах определяется соотношением 
Длина медианы (расстояние от излучателя до центра рабочей зоны положений шлема) RM рассчитывается по известной формуле:

где с - расстояние между ПРКК1 и ПРКК2.
Время распространения ультразвуковой волны вдоль медианы рассчитывается как

где TKK1, TKK2 - времена задержки сигналов в ПРККХ и ПРКК2, ТКС - время распространения УЗВ от ПРККХ до ПРКК1.
Скорость звука вдоль медианы определяется как vM=RM/TKKM.
Последовательность действий заявляемого способа коррекции:
- Измеряют координаты шлема, используя для измерения скорости УЗВ νнач любой корректирующий канал. При этом, например, νнач=R1/TKK1, где TKK1 - время задержки в первом корректирующем канале.
- Определяют направление от каждого излучателя на шлем.
- Для каждого излучателя сравнивают направление на шлем с направлениями на корректирующие приемники и направлением медианы и выбирают ближайшее к направлению на шлем.
- Заново рассчитывают расстояния от каждого излучателя до каждого нашлемного приемника с использованием скорости звука в выбранном направлении, по которым определяют скорректированные координаты шлема.
Скорректированные расстояния теперь определяются как 

Эффект коррекции достигается тем, что все расстояния (R, R1, R2, RM фиг. 3) под влиянием вибрации и изменения внешних условий меняются синхронно и пропорционально, а коррекция осуществляется в каждом периоде излучения с параметрами, определяемыми выбранным направлением.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ КООРДИНАТ ШЛЕМА ОПЕРАТОРА В КАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА И УЛЬТРАЗВУКОВАЯ НАШЛЕМНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2357184C1 |
| УЛЬТРАЗВУКОВАЯ НАШЛЕМНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ | 2010 |
|
RU2449242C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2168152C1 |
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| СПОСОБ ЮСТИРОВКИ НАШЛЕМНОЙ СИСТЕМЫ ВИЗИРОВАНИЯ | 2002 |
|
RU2251720C2 |
| СПОСОБ ИЗМЕРЕНИЯ | 1995 |
|
RU2117250C1 |
| Общевойсковая нашлемная система отображения информации, управления и целеуказания | 2019 |
|
RU2730727C1 |
| Способ идентификации реперов при решении задачи Р4Р в авиационных оптико-электронных системах позиционирования с единственной камерой | 2020 |
|
RU2749808C1 |


Способ коррекции линейных и угловых координат заключается в том, что на шлеме оператора в реперных точках размещают четыре нашлемных ультразвуковых приемников, а в кабине над шлемом оператора в связанной системе координат кабины - четыре ультразвуковых излучателя. По краям рабочей зоны возможных положений шлема размещают четыре ультразвуковых приемника четырех корректирующих каналов, осуществляют излучение и прием импульсных ультразвуковых сигналов. Измеряют время задержки сигналов от каждого ультразвукового излучателя до каждого нашлемного ультразвукового приемника и до четырех ультразвуковых приемников корректирующих каналов. Определяют направление с учётом данных указанных корректирующих каналов. Технический результат заключается в повышении точности определения координат шлема оператора в условиях вибрации и изменяющихся внешних условиях. 2 н.п. ф-лы, 4 ил.
1. Способ коррекции линейных и угловых координат шлема оператора летательного аппарата в ультразвуковой нашлемной системе позиционирования, содержащей четыре нашлемных ультразвуковых приемника, четыре ультразвуковых излучателя в кабине летательного аппарата, корректирующие каналы со своими ультразвуковыми приемниками, отличающийся тем, что используют четыре ультразвуковых приемника корректирующих каналов, размещенных попарно противоположно по краям рабочей зоны перемещений шлема, предварительно определяют координаты шлема, используя для измерения скорости звука любой корректирующий канал, для каждого излучателя определяют направление на шлем, сравнивают эти направления с направлениями на корректирующие приемники и центр рабочей зоны положений шлема и выбирают из них ближайшее к направлению на шлем, заново рассчитывают расстояния до каждого нашлемного приемника с использованием скорости звука в выбранном направлении, по которым определяют скорректированные координаты шлема.
2. Ультразвуковая нашлемная система определения линейных и угловых координат шлема головы оператора, включающая вычислитель и содержащая четыре ультразвуковых излучателя, размещенных в кабине над шлемом оператора в разнесенных точках с известными координатами в связанной с кабиной системе координат, четыре нашлемных ультразвуковых приемника, размещенных в реперных точках шлема, корректирующие каналы с ультразвуковыми приемниками каждый, мультиплексор, формирователь сигналов, синхронизатор, усилители сигналов нашлемных приемников с АРУ, измерители времени задержки сигналов нашлемных приемников, усилители сигналов корректирующих каналов и измерители времени задержки сигналов корректирующих каналов, при этом выход синхронизатора соединен с входами синхронизации: мультиплексора, всех измерителей времени задержки сигналов нашлемных приемников, всех измерителей времени задержки сигналов корректирующих каналов, формирователя сигналов, выход которого соединен с сигнальным входом мультиплексора, раздельные выходы которого соединены с ультразвуковыми излучателями, выходы нашлемных ультразвуковых приемников соединены через усилители сигналов нашлемных приемников с АРУ с сигнальными входами измерителей времени задержки сигналов нашлемных приемников, выходы которых соединены с входами информационных данных вычислителя, выходы ультразвуковых приемников корректирующих каналов соединены через усилители сигналов корректирующего канала с сигнальными входами измерителей времени задержки сигналов корректирующих каналов, выходы которых соединены с входом данных вычислителя, выход которого является выходом устройства, отличающаяся тем, что она содержит четыре корректирующих канала с четырьмя ультразвуковыми приемниками, размещенными попарно противоположно на краях рабочей зоны положений шлема оператора с известными расстояниями до каждого ультразвукового излучателя.
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ КООРДИНАТ ШЛЕМА ОПЕРАТОРА В КАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА И УЛЬТРАЗВУКОВАЯ НАШЛЕМНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2357184C1 |
| US 3836953 A1 17.09.1974 | |||
| US 5495427 A1 27.02.1996 | |||
| US 3777305 A1 04.12.1973. | |||

