Заявляемое изобретение относится к технике акустических нашлемных систем позиционирования и может быть применено в устройствах, где используются данные о трех координатах положения и трех углах ориентации головы оператора, преимущественно в нашлемных системах целеуказания и индикации летательных аппаратов, в системе управления прожектором вертолета, в авиа- и автотренажерах, в системах виртуальной реальности.
Нашлемная система целеуказания и индикации (НСЦИ) - обязательная принадлежность современных боевых самолетов и вертолетов. Она предназначена для автоматического определения направления на выбранную оператором (пилотом) цель с одновременной индикацией знакографической и сюжетной информации на фоне наблюдаемой им внешней обстановки. Входящая в состав НСЦИ система позиционирования (СП) должна иметь высокую точность и быть безопасной для пилота.
Наиболее близкой к заявляемому изобретению по технической сущности является ультразвуковая нашлемная система позиционирования (УЗНСП) (см. RU №68113, F41G 3/22, G01B 11/26, 2007), принятая за прототип.
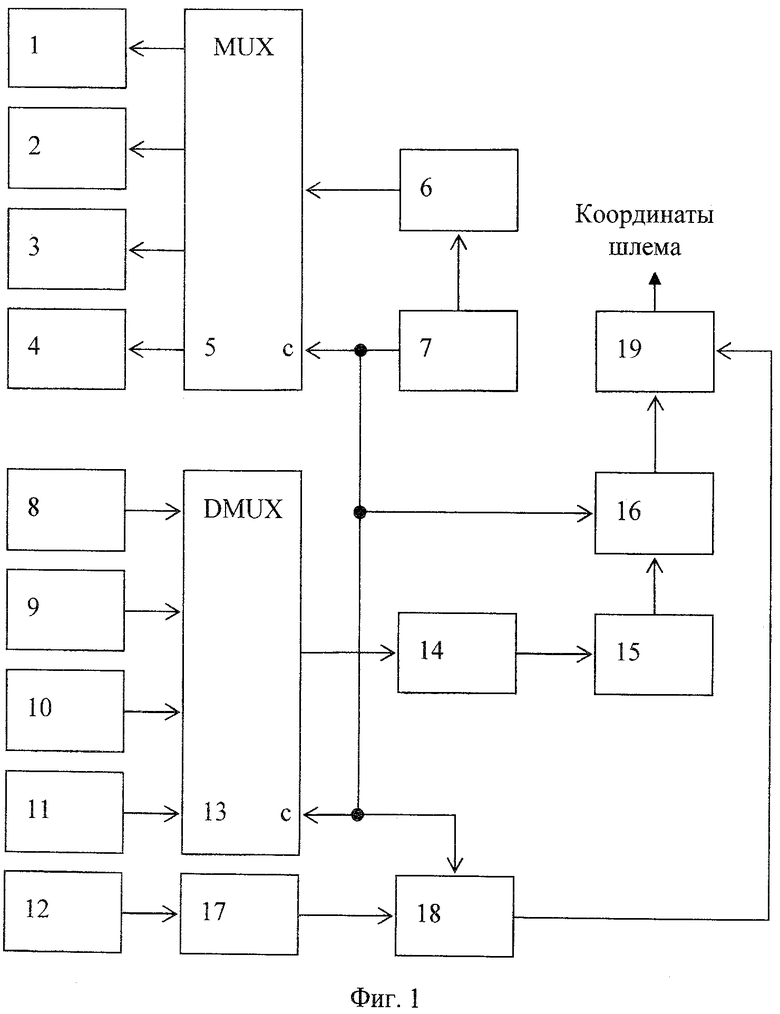
Работа прототипа УЗНСП поясняется структурной схемой, приведенной на фиг.1, где обозначены:
1, 2, 3, 4 - ультразвуковые излучатели;
5 - мультиплексор;
6 - формирователь сигналов;
7 - синхронизатор;
8, 9, 10, 11 - нашлемные ультразвуковые приемники;
12 - ультразвуковой приемник корректирующего канала (КК);
13 - демультиплексор;
14 - усилитель сигналов нашлемных приемников;
15 - схема АРУ;
16 - измеритель времени задержки сигналов нашлемных приемников;
17 - усилитель сигналов корректирующего канала;
18 - измеритель времени задержки сигналов корректирующего канала;
19 - вычислитель.
Ультразвуковые излучатели 1-4 размещены в кабине над шлемом пилота в разнесенных точках с известными координатами в связанной системе координат, нашлемные ультразвуковые приемники 8-11 размещены крестообразно в реперных точках, ультразвуковой приемник 12 корректирующего канала жестко закреплен в непосредственной близости от шлема пилота с известными расстояниями r[i] до каждого 1-го излучателя. Ультразвуковые излучатели 1…4, возбуждаемые формирователем сигналов 6 через мультиплексор 5, поочередно излучают ультразвуковые сигналы каждый в течение интервала ТП, определяемым синхронизатором 7. Это дает возможность идентифицировать номер излучателя, сигналы которого принимаются всеми приемниками на данном интервале времени. Для решения навигационной задачи - определения координат нашлемных приемников - необходимо в каждый интервал времени ТП измерять задержку распространения ультразвуковых волн от активного в этом периоде излучателя до всех нашлемных приемников.
Однако включенный между приемниками 8-11 и измерителем временем задержки нашлемных приемников 16 демультиплексор 13 позволяет в интервале ТП измерять время задержки только для одного приемника, так как время прихода сигнала заранее неизвестно и демультиплексор 13 коммутируется теми же сигналами, что и мультиплексор 5. В результате для получения всех необходимых значений времени распространения ультразвуковых волн каждому излучателю необходимо повторять излучение по четыре раза, т.е. мультиплексор 5 должен тактироваться с частотой, в четыре раза меньшей частоты демультиплесора. Отмеченное обстоятельство приводит к четырехкратному снижению темпа вывода конечной информации - линейных и угловых координат шлема.
Вторым недостатком УЗНСП является снижение помехоустойчивости к переотраженным сигналам предыдущего периода при близком расположении излучателей и приемников, то есть в условиях малых размеров кабины пилота, что характерно для самолетов-истребителей. В этом случае сигналы предыдущего периода излучения, отраженные от стен кабины и предметов интерьера кокпита, могут быть сравнимы по величине с полезными сигналами и для борьбы с ними требуются дополнительные меры.
Задача изобретения заключается в увеличении темпа выдачи координат шлема и повышении помехоустойчивости к переотраженным сигналам предыдущего периода.
Поставленная задача достигается тем, что УЗНСП, включающая вычислитель и содержащая не менее трех ультразвуковых излучателей, размещенных в кабине над шлемом оператора в разнесенных точках с известными координатами в связанной системе координат кабины, не менее трех нашлемных ультразвуковых приемников, размещенных в реперных точках, и не менее одного ультразвукового приемника корректирующего канала, размещенного в непосредственной близости от шлема пилота с известными расстояниями r[i] до каждого i-го ультразвукового излучателя, мультиплексор, формирователь сигналов, синхронизатор, четыре усилителя сигналов нашлемных приемников с АРУ, четыре измерителя времени задержки сигналов нашлемных приемников, усилитель сигналов корректирующего канала и измеритель времени задержки сигналов корректирующего канала, при этом выход синхронизатора соединен с входами синхронизации: мультиплексора, всех измерителей времени задержки сигналов нашлемных приемников, измерителя времени задержки сигналов корректирующего канала, формирователя сигналов, выход которого соединен с сигнальным входом мультиплексора, раздельные выходы которого соединены с ультразвуковыми излучателями, выходы нашлемных ультразвуковых приемников соединены через усилители сигналов нашлемных приемников с АРУ с сигнальными входами измерителей времени задержки сигналов нашлемных приемников, выходы которых соединены с входами информационных данных вычислителя, выход ультразвукового приемника корректирующего канала соединен через усилитель сигналов корректирующего канала с сигнальным входом измерителя времени задержки сигналов корректирующего канала, выход которого соединен с входом данных вычислителя, выход которого является выходом устройства.
Технический результат в настоящем изобретении обеспечивается:
в части увеличения темпа выдачи информации в виде координат шлема - исключением демультиплексора и введением четырех отдельных измерителей временных задержек сигналов для каждого нашлемного приемника;
в части повышения помехоустойчивости к переотраженным сигналам предыдущего периода излучения - специальной формой излучаемых сигналов с фазовой манипуляцией, причем чередование фаз сигналов определяется четностью номера периода излучения.
Изобретение иллюстрируется чертежами, на которых изображено:
на фиг.1 - прототип (структурная электрическая схема системы);
на фиг.2 - структурная электрическая схема заявляемой системы;
на фиг.3 - форма излучаемого сигнала;
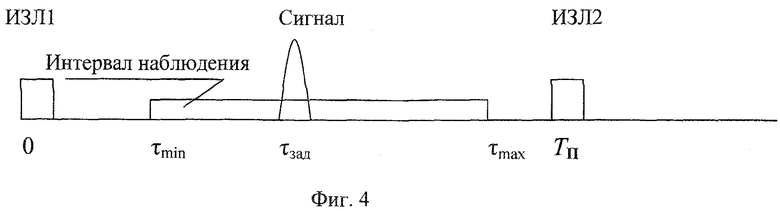
на фиг.4 - сигнал и интервал его наблюдения в одном из нашлемных приемников;
на фиг.5 - выделение характерной точки сигнала для определения его временного положения;
на фиг.6 - рисунок, поясняющий метод селекции полезных сигналов от переотраженных сигналов предыдущего периода излучения.
На фиг.2 обозначены:
1, 2, 3, 4 - ультразвуковые излучатели;
5 - мультиплексор;
6 - формирователь сигнала;
7 - синхронизатор;
8, 9, 10, 11 - ультразвуковые нашлемные приемники;
12 - ультразвуковой приемник корректирующего канала;
13 - усилитель сигналов нашлемных приемников с АРУ;
14 - измеритель времени задержки сигналов нашлемных приемников;
15 - усилитель сигналов корректирующего канала;
16 - измеритель времени задержки сигналов корректирующего канала;
17 - бортовой вычислитель.
В кратком изложении отличие заявляемой системы от прототипа состоит в том, что для увеличения темпа выдачи выходной информации - координат шлема - вместо мультиплексора и одного (общего для всех нашлемных приемников) измерителя времени задержки сигналов нашлемных приемников используются отдельные измерители времени задержки для каждого нашлемного приемника. Для увеличения помехоустойчивости к переотраженным сигналам предыдущего периода фаза излучаемых ультразвуковых импульсов меняется на 180° на половине их длительности, т.е. они представляют собой простейшие фазоманипулированные сигналы, причем чередование фаз (+-) или (-+) зависит от четности номера активного излучателя.
Описание работы системы произведем при использовании четырех ультразвуковых излучателей, четырех нашлемных ультразвуковых приемников и одного ультразвукового приемника корректирующего канала.
Заявляемая система содержит:
синхронизатор 7, первый выход которого соединен двухразрядной шиной с входами синхронизации формирователя сигналов 6, мультиплексора 5 и измерителей времени задержки сигналов нашлемных приемников 14 и измерителя времени задержки для сигналов корректирующего канала 16; четыре ультразвуковых излучателя 1…4, входы которых через мультиплексор 5 соединены с выходом формирователя сигналов; четыре ультразвуковых приемника 8…11, выходы которых соединены через усилители сигналов нашлемных приемников 13 с сигнальными входами измерителей времени задержки сигналов нашлемных приемников 14, выходы которых соединены с входами данных основных каналов бортового вычислителя 17; ультразвуковой приемник корректирующего канала 12, выход которого через усилитель сигналов корректирующего канала 15 соединен с измерителем времени задержки сигналов корректирующего канала 16, выход которого соединен с входом данных корректирующего канала бортового вычислителя 17, выход которого является выходом устройства.
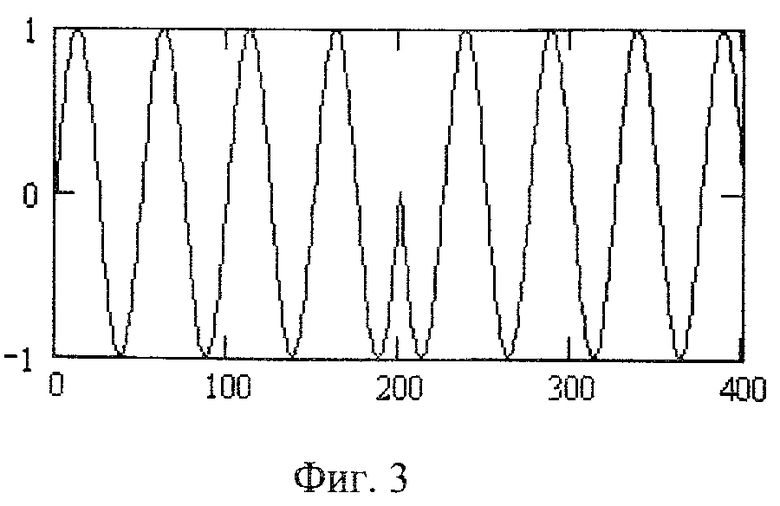
Система работает следующим образом. Синхронизатор 7 выдает синхроимпульсы в виде двухразрядного числа с периодом повторения ТП, которое циклически меняется от периода к периоду, пробегая значения 00, 01, 10, 11. Формирователь сигналов 6 генерирует фазоманипулированные сигналы вида (+-) или (-+) в зависимости от четности поступающего на него синхросигнала (см. фиг.3). Эти же синхросигналы переключают мультиплексор 5. В результате ультразвуковые излучатели 1, 2, 3 и 4 излучают сигналы поочередно, со сдвигом ТП и соответствующим чередованием фаз, а нашлемные приемники 14 и приемник корректирующего канала 12 в течение интервала наблюдения принимают сигнал активного излучателя.
Интервал наблюдения определяется рабочей зоной нахождения шлема, которая определяет минимальное и максимальное расстояние от него до каждого из излучателей, расположенных в кабине (как правило, на ее потолке).
Поиск сигнала производится в интервале наблюдения {τmin, τmax}, который показан на фиг.3. Предварительно, для определения уровня помех в виде шумов и отраженных сигналов, производится поиск максимума Um0 в интервале 0…τmin, свободном от полезных сигналов (фиг.4, 5). Устанавливается значение первого порогового уровня, равное Uпор1=k0·UmO, где k0=1,5…2, и ищется первое пересечение сигнала с этим порогом (на временной оси - Tm0, фиг.5). Превышение первого порога может быть обусловлено практически только полезным сигналом, т.к. он проходит от излучателя к приемнику по кратчайшему пути, тогда как путь отраженных сигналов от того же излучателя всегда больше. Наличие же отраженных сигналов на интервале 0…τmin обусловлено излучением в предшествующие периоды.
Затем от момента времени Tm0 производится поиск максимальной амплитуды Umax. Этот максимум полезного сигнала используется далее для выставления требуемых порогов.
Далее для отбраковки отраженных сигналов от излучения предыдущего периода производится проверка чередования фаз сигнала с зафиксированным максимумом. С этой целью нечетные излучатели, например, излучают сигнал «+-», а четные - «-+».
Для отбраковки ищутся первые пересечения с положительным +Unop (пунктирная линия фиг.6) и отрицательным -Uпор (штрихпунктирная линия фиг.6) пороговыми значениями, причем |Unop|=kl-Umax. Коэффициент k1 подбирается экспериментально; его ожидаемое значение 0,45…0,55 (см. фиг.6).
Чередованию фаз «+-» соответствует первое пересечение с положительной волной, «-+» - с отрицательной (фиг.6). Зная номер периода излучения, производят отбраковку «неправильных» сигналов. При совпадении чередования фаз в текущем периоде с измеренным отмеченный сигнал считается правильно обнаруженным.
Когда Umax найден, определяется пороговый уровень Uпор2=kUmax, где k=0,5…0,65 (фиг.5).
Пересечение сигнала с порогом в окрестности Umax дает примерное положение характерной точки Тприм сигнала, точное значение которой Тзад ищется как ближайшее пересечение с нулем сигнала левее Тприм.
Усиленные сигналы каждого нашлемного приемника 8-11 поступают на сигнальные входы соответствующих измерителей времени задержки 14, на синхронизирующие входы которых подаются синхросигналы синхронизатора 7.
В измерителях 14, как описано выше, селектируются сигналы с чередованием фаз, соответствующим данному периоду излучения, и определяются временные задержки принятых сигналов относительно излученных и эти данные передаются в бортовой вычислитель 17.
Приемник корректирующего канала 12 также принимает сигнал активного излучателя, который после усиления в усилителе сигналов корректирующего канала 15 поступает на сигнальный вход измерителя времени задержки сигналов корректирующего канала 16, на синхронизирующий вход которого подаются синхросигналы синхронизатора 7. В измерителе 16 также селектируется сигнал с нужным чередованием фаз и определяются временные задержки сигналов корректирующего канала относительно излученных сигналов и эти данные также передаются в бортовой вычислитель 17. Таким образом, за четыре периода излучения 4ТП измерители 14 и 16 определяют временные задержки T[i,j] принятых нашлемными приемниками 8…11 сигналов, где i - номер излучателя, j - номер приемника; аналогично измеритель 16 определяет задержку сигналов корректирующего канала TKK[i].
В бортовом вычислителе 17 по данным о временных задержках в корректирующем и основных каналах рассчитываются расстояния от каждого нашлемного приемника до каждого излучателя по формуле
R[i,J]=T[i,j]r[i]/TKK[i],
где r[i] - известные расстояния от i-го излучателя до приемника корректирующего канала. Рассчитанные значения R[i,j] позволяют решить навигационную задачу определения координат нашлемных приемников и, следовательно, линейных и угловых координат шлема.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ЛИНЕЙНЫХ И УГЛОВЫХ КООРДИНАТ ШЛЕМА ОПЕРАТОРА ЛЕТАТЕЛЬНОГО АППАРАТА И УЛЬТРАЗВУКОВАЯ НАШЛЕМНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572222C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ КООРДИНАТ ШЛЕМА ОПЕРАТОРА В КАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА И УЛЬТРАЗВУКОВАЯ НАШЛЕМНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2357184C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2168152C1 |
| СПОСОБ ИЗМЕРЕНИЯ | 1995 |
|
RU2117250C1 |
| СПОСОБ РАДИОНАВИГАЦИИ И РЕГИОНАЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2164694C2 |
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2105321C1 |


Изобретение относится к технике акустических нашлемных систем позиционирования и может быть применено в устройствах, где используются данные о трех координатах положения и трех углах ориентации головы оператора, преимущественно в нашлемных системах целеуказания и индикации летательных аппаратов, в системе управления прожектором вертолета, в авиа- и автотренажерах, в системах виртуальной реальности. Сущность: система содержит не менее трех ультразвуковых излучателей, размещенных в кабине над шлемом оператора, четыре нашлемных ультразвуковых приемника, не менее одного ультразвукового приемника корректирующего канала, размещенного в непосредственной близости от шлема четыре усилителя сигналов нашлемных приемников, четыре измерителя времени задержки сигналов нашлемных приемников, усилитель сигналов корректирующего канала и измеритель времени задержки сигналов корректирующего канала, мультиплексор, формирователь сигналов, синхронизатор, бортовой вычислитель. Технический результат: увеличение темпа выдачи координат шлема и повышение помехоустойчивости к переотраженным сигналам предыдущего периода. 2 з.п. ф-лы, 6 ил.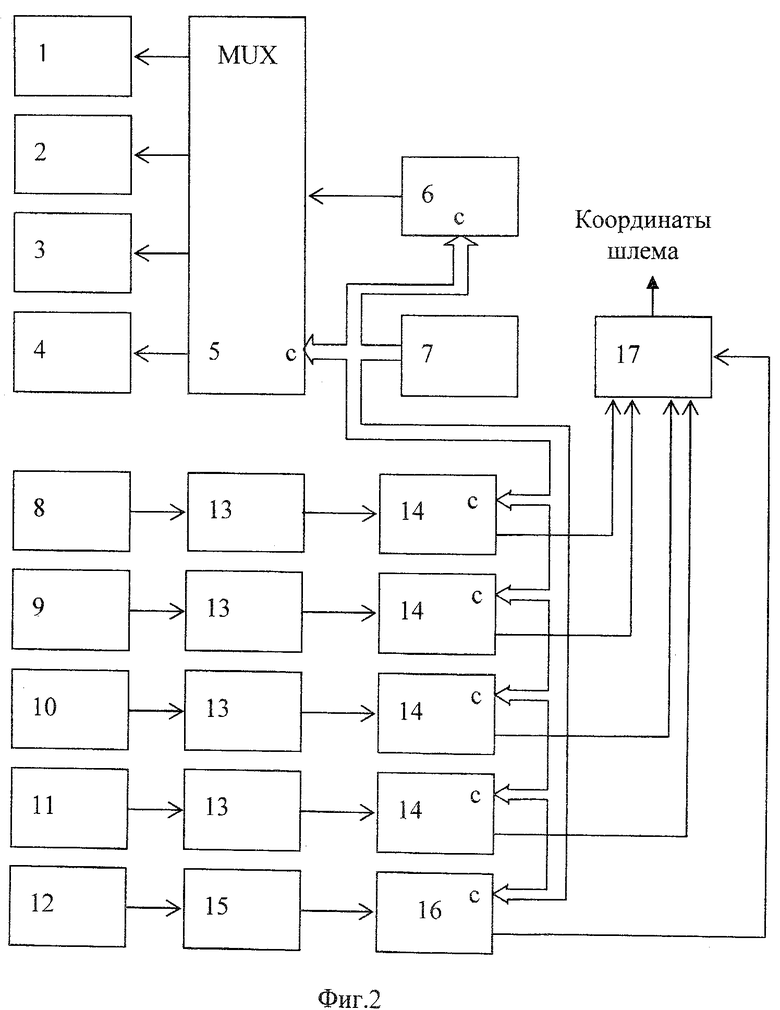
1. Ультразвуковая нашлемная система позиционирования, включающая не менее трех ультразвуковых излучателей, размещенных в кабине над шлемом оператора в разнесенных точках с известными координатами в связанной системе координат кабины, четыре нашлемных ультразвуковых приемника, размещенных в реперных точках, и не менее одного ультразвукового приемника корректирующего канала, размещенного в непосредственной близости от шлема оператора с известными расстояниями r[i] до каждого i-го ультразвукового излучателя, мультиплексор, формирователь сигналов, синхронизатор, усилитель сигналов корректирующего канала и измеритель времени задержки сигналов корректирующего канала, бортовой вычислитель, причем выход формирователя сигналов соединен с сигнальным входом мультиплексора, раздельные выходы которого соединены с ультразвуковыми излучателями, выход ультразвукового приемника корректирующего канала соединен через усилитель сигналов корректирующего канала с сигнальным входом измерителя времени задержки сигналов корректирующего канала, выход которого соединен со вторым входом данных вычислителя, отличающаяся тем, что она содержит четыре усилителя сигналов нашлемных приемников, четыре измерителя времени задержки сигналов нашлемных приемников, при этом выход синхронизатора соединен двухразрядной шиной с входом синхронизации мультиплексора, с входами синхронизации измерителей времени задержки сигналов нашлемных приемников, с входом синхронизации измерителя времени задержки сигналов корректирующего канала и с входом формирователя сигналов, выходы нашлемных ультразвуковых приемников через усилители с АРУ соединены с входами измерителей времени задержки сигналов нашлемных приемников, выходы которых соединены с входом данных вычислителя, выход которого является выходом устройства.
2. Ультразвуковая нашлемная система позиционирования по п.1, отличающаяся тем, что формирователь сигналов выполнен с возможностью манипуляции фазы, причем последовательность фаз определяется четностью номера активного излучателя.
3. Ультразвуковая нашлемная система позиционирования по п.1, отличающаяся тем, что измерители временных задержек выполнены с возможностью проверки совпадения чередования фаз на соответствие номеру активного излучателя.
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ КООРДИНАТ ШЛЕМА ОПЕРАТОРА В КАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА И УЛЬТРАЗВУКОВАЯ НАШЛЕМНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2357184C1 |
| СПОСОБ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2000 |
|
RU2197013C2 |
| Способ автоматического управления процессом кристаллизации сахара | 1980 |
|
SU958504A1 |
| WO 2000042376 A2, 20.07.2000. | |||

