Изобретение относится к области обработки электрических сигналов, а именно к методам удаления импульсной помехи из электрического сигнала.
Известен способ удаления импульсной помехи из электрического сигнала (Антонов В.И., Лазарева Н.М., Пуляев В.И. Методы обработки цифровых сигналов энергосистем. М.: НТФ «Энергопрогресс» // «Энергетик». 2000. С. 16-19), согласно которому электрический сигнал преобразуют в цифровой сигнал путем измерения его в равномерно фиксированные моменты времени, предсказывают отсчеты цифрового сигнала с помощью оператора линейного предсказания и формируют контрольный сигнал как ошибку (невязку) предсказания отсчетов. И если абсолютная величина контрольного сигнала на данном отсчете превышает порог срабатывания, то считают, что отсчет содержит импульсную помеху, и его заменяют предсказанным отсчетом.
Используемый в способе оператор линейного предсказания не адаптируется на сигнал, в связи с чем контрольный сигнал даже в случае обработки чистого от импульсной помехи электрического сигнала не равен нулю и имеет переменный характер. С целью повышения чувствительности способа к импульсной помехе порог срабатывания формируется как абсолютная величина средней скорости изменения сигнала, определяемая как усредненная сумма абсолютных приращений сигнала на заданном числе отсчетов. Это позволяет адаптивно повышать уровень порога на участках сигнала с высокой скоростью изменения. Однако операция усреднения вносит задержку в изменение порога, в связи с чем адаптация порога к изменению сигнала происходит с некоторым отставанием. Это приводит к потере синхронности изменения кривых абсолютной величины контрольного сигнала и порога, повышая уровень их рассогласованности и ограничивая тем самым чувствительность способа к импульсной помехе.
Наиболее близким к заявляемому способу по использованию, технической сущности и достигаемому техническому результату является способ удаления импульсной помехи из электрического сигнала, реализованный в устройстве подавления импульсной помехи (Пат. 4587620 США, МПК Н04В 15/00, Н04В 1/34. Noise elimination device/ Koji Niimi; Takayasu Kondo).
Этот способ принят за прототип. Согласно ему электрический сигнал преобразуют в цифровой сигнал путем измерения его в равномерно фиксированные моменты времени, предсказывают отсчеты цифрового сигнала с помощью оператора линейного предсказания и формируют контрольный сигнал в виде ошибки предсказания отсчета (невязки). И если абсолютная величина контрольного сигнала превышает порог срабатывания, отсчет с импульсной помехой заменяют предсказанным отсчетом.
Оператор линейного предсказания в способе адаптируется к электрическому сигналу. Однако и в нем контрольный сигнал значителен и имеет переменный характер. Поэтому порог срабатывания в прототипе формируют таким образом, чтобы он одновременно был пропорционален уровню цифрового сигнала и скорости его изменения во времени. Для этого формируются две величины. Первая из них представляет собой среднюю величину квадратов скорости изменения (приращения) кривой цифрового сигнала, а вторая - среднюю величину квадратов отсчетов цифрового сигнала. Порог же формируется как квадратный корень из взвешенной суммы указанных величин. Такой подход к формированию порога позволяет лучше подстраиваться к уровню и скорости изменения контрольного сигнала, повышая тем самым чувствительность способа к импульсной помехе. Однако, как и в аналоге, ход кривой порога недостаточно хорошо синхронизирован с изменением кривой контролируемого сигнала, что ограничивает чувствительность способа к импульсной помехе.
Техническим результатом предлагаемого способа является повышение чувствительности и точности определения отсчета с импульсной помехой. С этой целью в известном способе удаления импульсной помехи из электрического сигнала, согласно которому электрический сигнал преобразуют в цифровой сигнал путем измерения его в равномерно фиксированные моменты времени, предсказывают отсчеты цифрового сигнала с помощью основного оператора линейного предсказания, формируют контрольный сигнал и, если его абсолютная величина на данном отсчете превышает порог срабатывания, считают, что найден отсчет с импульсной помехой, и заменяют его предсказанным отсчетом, вводят новые операции. Их сущность заключается в том, что с помощью дополнительного оператора линейного предсказания формируют соответствующие оценки отсчетов цифрового сигнала, определяют невязки упомянутых операторов как ошибки предсказания отсчетов цифрового сигнала операторами на основе соответствующих последовательностей отсчетов, сдвинутых по времени относительно друг друга, образуют сигнал обобщенной невязки как полусумму невязок упомянутых операторов и принимают его за контрольный сигнал, причем выбирают амплитудно-фазовые частотные характеристики операторов линейного предсказания таким образом, чтобы при предсказании одного и того же отсчета сигнала, свободного от импульсной помехи, на основе одной и той же последовательности отсчетов сигнала ошибки операторов были противоположны по знаку и равны по модулю.
Для дальнейшего повышения чувствительности способа предлагается формировать контрольный сигнал как полуразность сигналов обобщенных невязок на текущем и предыдущем отсчетах.
Еще одно отличие способа заключается в том, что на каждом из последующих отсчетов после превышения модулем контрольного сигнала порога срабатывания формируют отношение разности двух соседних отсчетов контрольного сигнала на текущем отсчете к аналогичной разности на предыдущем отсчете, и, если абсолютная величина указанного отношения станет меньше заданного порога отношений, считают, что отсчет, сдвинутый назад от текущего отсчета на заданное число интервалов дискретизации, содержит импульсную помеху, причем упомянутое число интервалов сдвига назад выбирают в зависимости от уровня порога отношений.
В качестве операторов линейного предсказания могут использоваться линейные фильтры-интерполяторы, формирующие оценки отсчетов путем интерполяции кривой сигнала по его отсчетам с помощью полиномов. Кроме того, в качестве операторов линейного предсказания могут использоваться заграждающие фильтры гармоник.
Новые операции позволяют повысить чувствительность и точность определения отсчета с импульсной помехой.
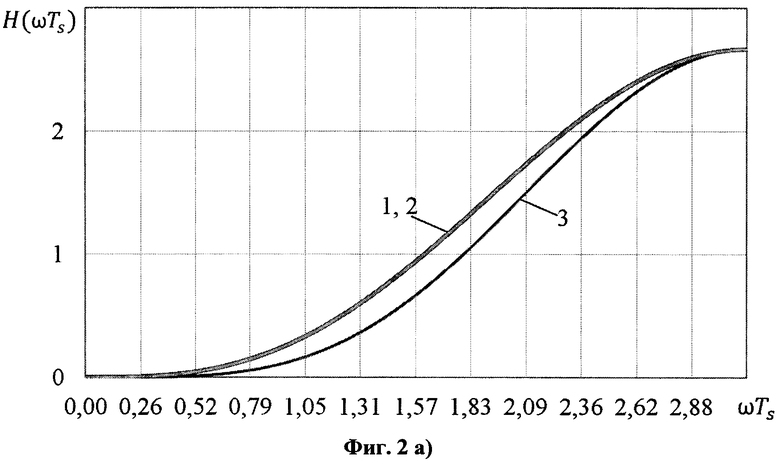
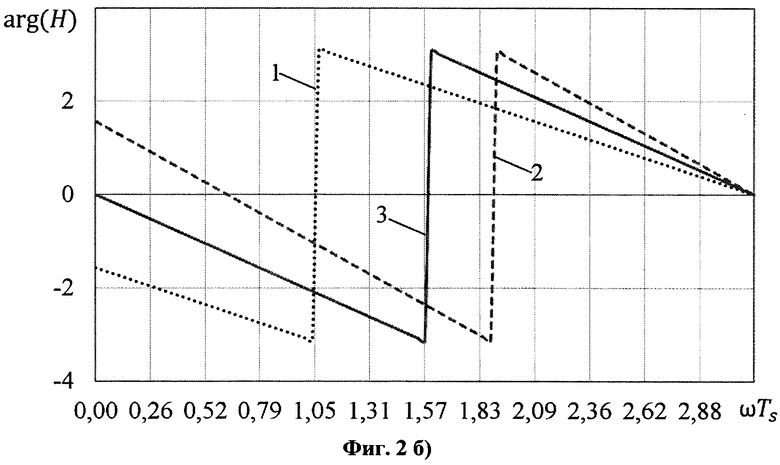
На фиг. 1 иллюстрируется способ формирования оценки одного и того же отсчета основным (сплошные стрелки) и дополнительным (пунктирные стрелки) линейными операторами. Числа при стрелках указывают значение веса используемого отсчета. На фиг. 2 показаны (при частоте дискретизации 1200 Гц) частотные характеристики основного (3) и дополнительного (2) операторов (кривые 1 и 2) и фильтра (6) - зависимости уровня контрольного сигнала от частоты электрического сигнала (кривая 3). Фиг. 3 иллюстрирует выбор порога срабатывания предлагаемого способа.
Способ предназначен для удаления импульсной помехи из электрического сигнала x(t), преобразованного в цифровой сигнал х(k) путем его измерения в равномерно фиксированные моменты времени t=kTs, где k - номер отсчета, Ts - период дискретизации.
Основная идея способа заключается в том, что в каждый дискретный момент времени с помощью основного и дополнительного операторов линейного предсказания формируется оценка произвольно выбранного предыдущего отсчета цифрового сигнала. Амплитудно-фазовые частотные характеристики упомянутых операторов выбираются таким образом, чтобы при предсказании одного и того же отсчета сигнала, свободного от импульсной помехи, на основе одной и той же последовательности отсчетов сигнала ошибки операторов были противоположны по знаку и равны по модулю. Поэтому при обработке сигнала, свободного от импульсной помехи, уровень контрольного сигнала, представляющего полусумму ошибок предсказания операторов, будет мал. Если же в сигнале появится импульсная помеха, то, благодаря сдвигу во времени последовательностей отсчетов, используемых операторами, отсчет с импульсной помехой вначале попадает только в окно обработки основного оператора, а окно обработки дополнительного оператора будет без импульсной помехи. Поэтому ошибка предсказания основного оператора еo(k) значительно возрастет, а ошибка предсказания дополнительного оператора ед(k) останется на уровне предсказания отсчета сигнала, свободного от импульсной помехи. Это приводит к резкому повышению уровня сигнала обобщенной невязки

принимаемой в качестве контрольного сигнала, что будет свидетельствовать о наличии импульсной помехи на текущем отсчете x(k).
Рассмотрим более подробно работу способа при использовании в качестве операторов линейного предсказания полиномов второго порядка. Как уже отмечалось, операторы используют разные последовательности отсчетов, причем их сдвиг относительно друг друга может осуществляться по-разному. Одним из вариантов такого сдвига последовательностей является случай, когда основной оператор использует предыдущие отсчеты, включая и текущий k-й отсчет, а дополнительный оператор - со сдвигом назад на шаг, начиная с (k-1)-го отсчета (фиг. 1).
Пусть оба оператора предсказывают (k-2)-й отсчет (на фиг. 1 черный кружочек). Основной оператор предсказывает упомянутый отсчет по лидирующим отсчетам:

а дополнительный оператор по отсчетам, взятым со сдвигом по времени на один шаг:

Выражения для операторов удобнее всего получить, используя для представления полиномов форму Лагранжа (Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1986, с. 502). Невязку операторов будем определять как ошибку предсказания отсчета x(k-2). Несложно видеть, что в текущий k-й момент невязка дополнительного оператора

представляет собой инвертированную по знаку невязку основного оператора

вычисленную по последовательности отсчетов со сдвигом на шаг назад. Поэтому АФЧХ фильтра (3)

и фильтра (2)
 будут противоположны по знаку и сдвинуты на угол α=ωТs, равный угловому расстоянию между отсчетами на частоте ω.
будут противоположны по знаку и сдвинуты на угол α=ωТs, равный угловому расстоянию между отсчетами на частоте ω.
Согласно (1) контрольный сигнал можно рассматривать как выходной сигнал фильтра, полученного как совокупность двух фильтров (2) и (3):

АФЧХ фильтра (6) легко определяется из совместного рассмотрения выражений (1), (4) и (5):

где  - амплитудно-частотная характеристика.
- амплитудно-частотная характеристика.
Рабочая область частот АФЧХ фильтра (7), предназначенного для обработки сигнала, свободного от импульсной помехи, должна располагаться в низкочастотной области - области значительного подавления входного сигнала. Например, для цифровых систем релейной защиты с частотой дискретизации входных сигналов 1200 Гц (фиг. 2) она будет находиться в окрестности α= =ω0Ts=π/12 (при номинальной частоте сигнала ω0=2π50 с-1). Тогда контрольный сигнал при входном сигнале, свободном от импульсной помехи, будет иметь невысокий уровень небаланса. Это важно, поскольку уровень небаланса в контрольном сигнале влияет на выбор порога, а значит, и на чувствительность фильтра (6) к импульсной помехе. Как следует из (7), небаланс зависит от угла α, вызванного сдвигом последовательностей отсчетов, используемых операторами (2) и (3). Поэтому желательно, чтобы они были несильно сдвинуты относительно друг друга.
Покажем, как происходит определение импульсной помехи фильтром (6).
Пусть электрический сигнал x(t) является синусоидальным частоты ω и содержит импульсную помеху величиной b. Положим, что после ее преобразования в цифровой сигнал импульсная помеха оказалась в отсчете с номером r. Тогда цифровой сигнал x(k) можно представить в виде суммы двух сигналов: синусоидального сигнала, свободного от импульсной помехи

и сигнала импульсной помехи xb(k), состоящего только из импульсной помехи величиной b=ηXm в дискретный момент k=r:

где η - относительная величина импульсной помехи,
функция Кронекера.
Удобно рассматривать определение импульсной помехи как результат реакции линейного фильтра (6) с АФЧХ (7) на цифровой сигнал

В этом случае выходной сигнал фильтра

будет состоять из реакции на синусоидальный сигнал (8)

и реакции wb(k) на сигнал с импульсной помехой (9). Реакцию wb(k) удобно рассматривать во временной области. До отсчета с импульсной помехой (при k<r) реакция на импульсную помеху wb(k)=0 и контрольный сигнал будет полностью определяться составляющей (12), являющейся по сути фоновой составляющей реакции фильтра (фиг. 3, а). Именно с учетом его амплитуды и выбирается порог h для контрольного сигнала, полагая, что

где  - коэффициент чувствительности порога. При k=r отсчет с импульсной помехой входит в окно обработки фильтра (6) и в его выходном сигнале появляется составляющая реакции на импульсную помеху:
- коэффициент чувствительности порога. При k=r отсчет с импульсной помехой входит в окно обработки фильтра (6) и в его выходном сигнале появляется составляющая реакции на импульсную помеху:

Импульсная помеха в отсчете x(r) будет обнаружен, если модуль контрольного сигнала (6) превысит порог h (фиг. 3, б), т.е.

Оценим чувствительность способа к импульсной помехе. Для этого перепишем (15) с учетом выражений (12)-(14):

Очевидно, что наихудший случай с точки зрения чувствительности к импульсной помехе возникает при разных знаках слагаемых в левой части неравенства (16) и максимальном абсолютном значении ее первой слагаемой, т.е. при

Это тот случай, когда для срабатывания способа реакция на импульсную помеху должна превосходить по абсолютной величине реакцию на сигнал противоположного знака, свободный от импульсной помехи:

Сокращая обе части условия срабатывания (17) на Хm, получаем меру чувствительности способа к импульсной помехе:

Как видно из (18), чем выше подавление фильтра (6) на частоте сигнала, свободного от импульсной помехи [чем ниже коэффициент передачи W(ωTs)], тем выше чувствительность способа. Оттуда же следует, что относительная величина выявляемой импульсной помехи не может быть ниже 12-кратной величины коэффициента передачи АЧХ фильтра на частоте со входного сигнала.
Условие (18) справедливо и для прототипа. Поскольку в нем контрольный сигнал вычисляется как невязка основного оператора линейного предсказания, то, сравнивая АЧХ фильтра (3) на частоте сигнала, свободного от импульсной помехи [модуль АФЧХ согласно (4)]
и АЧХ фильтра (6) [модуль АФЧХ согласно (7)]
приходим к выводу, что предлагаемый способ превосходит прототип по чувствительности в  раз. При α=π/12 (при частоте дискретизации 1200 Гц для электрического сигнала промышленной частоты 50 Гц) чувствительность способа лучше прототипа в 7,66 раза.
раз. При α=π/12 (при частоте дискретизации 1200 Гц для электрического сигнала промышленной частоты 50 Гц) чувствительность способа лучше прототипа в 7,66 раза.
Чувствительность способа может быть усилена, если контрольный сигнал формировать как полуразность между сигналами обобщенных невязок (1) на текущем k-м отсчете и на предыдущем (k-1)-м отсчете. Покажем это. Действительно, в случае использования в качестве операторов линейного предсказания фильтров (2) и (3) контрольный сигнал будет определяться как разность невязок (6), вычисленных в разные дискретные моменты времени, а именно

АФЧХ для фильтра (19) легко определяется с учетом АФЧХ (7) фильтра (6):

Реакция на сигнал, свободный от импульсной помехи, (8) согласно АФЧХ (20) будет

а реакция на импульсную помеху будет
Тогда из неравенства (15) с учетом того, что оно записано для реакции фильтра (19), получаем условие для оценки чувствительности способа при использовании контрольного сигнала (19):

Рассуждая аналогично, как и при выводе условия (18), нужно принять, что наихудший случай для выявления импульсной помехи соответствует равенству

Мера чувствительности способа к импульсной помехе в этом случае будет

Оценить, насколько повысится чувствительность способа, можно, сравнив (18) и (21) и вычислив отношение

При α=π/12 чувствительность способа повышается в 3,83 раза по сравнению со случаем использования контрольного сигнала (6).
В качестве операторов линейного предсказания возможно использование заграждающих фильтров гармоник, в особенности тогда, когда априори известно, что сигнал может состоять из определенного числа известных гармоник. Примером использования заграждающих фильтров может служить удаление импульсной помехи в задачах автоматического ограничения повышения напряжения (АОПН), когда сигнал напряжения в режиме параметрического резонанса в электрической сети может содержать основную и вторую гармоники (Левиуш А.И., Катунян В.И. Исследование на математической модели параметрического резонанса на второй гармонике для анализа работы релейной защиты ВЛ // Электричество. №1. 1990. (стр. 57-62)).
В этом случае в качестве основного оператора линейного предсказания может быть выбран заграждающий оператор, заведомо настроенный на заграждение первой и второй гармоник. Пусть основной оператор предсказывает текущий k-й отсчет сигнала

где

Здесь ω0 - номинальная частота первой гармоники. Тогда невязку основного оператора удобно определять как разность предсказанного текущего отсчета

а невязку дополнительного оператора - как инвертированную по знаку невязку предсказания (k-1)-го отсчета тем же основным оператором

Контрольный сигнал, вычисленный согласно (1), будет равен

где
d1=1-а1-а2,
d2=2+a1а2-а1-а2.
Для сети номинальной частоты 50 Гц и при частоте дискретизации сигнала 1200 Гц (Ts=1/1200 с) коэффициенты фильтров будут следующими: а1=-1,932; а2=-1,732; d1=4,664; d2=9,010.
Дальнейшее повышение чувствительности способа к импульсной помехе возможно при более скрупулезном учете свойств контрольного сигнала. Понятно, что импульсная помеха значительной величины будет обнаружена сразу, как только она окажется в пределах окна основного оператора, и абсолютное значение контрольного сигнала (6) или (19), или (22) будет значительно и превысит порог (13). Однако при относительно малой величине импульсной помехи она может быть и не обнаружена на первом отсчете окна фильтра контрольного сигнала. Но, как показывает анализ структуры выражений (6), (19) и (22), по мере продвижения импульсной помехи вглубь окна фильтра уровень составляющей контрольного сигнала, вызванной реакцией на импульсную помеху, увеличивается, и на одном из отсчетов окна превысит по абсолютной величине заданный порог. Если не предпринимать специальных мер, то отсчет с импульсной помехой будет определен неверно. Покажем, как можно определить место импульсной помехи в этом случае. Для упрощения изложения работы способа в качестве контрольного сигнала будем рассматривать выражение (6).
Как видно из (6), по мере продвижения r-го отсчета с импульсной помехой вглубь окна фильтра на его выходе поочередно будут появляться следующие составляющие реакции на импульсную помеху:

Анализ (23) показывает, что уровень составляющей реакции на импульсную помеху вначале, по мере продвижения импульсной помехи вглубь окна фильтра растет, а затем уменьшается. Эту особенность в поведении контрольного сигнала и использует способ для определения места положения импульсной помехи в окне фильтра. Для этого на следующем отсчете после выполнения условия (15) анализируют отношение разностей Δw(r) и Δw (r-1) двух соседних отсчетов контрольного сигнала

В случае синусоидального цифрового сигнала x(k) разность соседних отсчетов
Δw(r)=w(r)-w(r-1)=Δws(r)+Δwb(r),
как это видно из (11), состоит из суммы разности отсчетов реакции на синусоидальный сигнал
Δws(r)=ws(r)-ws(r-1)
и разности отсчетов реакции на импульсную помеху
Δwb(r)=wb(r)-wb(r-1).
Разность отсчетов реакции на синусоидальный сигнал с учетом (12) будет равна
Δws(r)=Msin[ωTs(r-2,5)],
где

ее амплитуда. Сравнивая (25) с (13), приходим к выводу, что для большинства практических случаев амплитуда М разности Δws(r) несравненно меньше, чем порог h. Действительно, например, при частоте дискретизации 1200 Гц  и частоте основной гармоники входного сигнала ω=314 с-1 минимальное значение отношения (при ζ=1) амплитуды разности к порогу
и частоте основной гармоники входного сигнала ω=314 с-1 минимальное значение отношения (при ζ=1) амплитуды разности к порогу  Другими словами, при выполнении условия срабатывания (15) амплитуда сигнала Δws(r) значительно уступает сигналу Δwb(r) (в нашем примере около 8 раз), в связи с чем при формировании величины θ(k) им можно пренебречь. Это видоизменит (24):
Другими словами, при выполнении условия срабатывания (15) амплитуда сигнала Δws(r) значительно уступает сигналу Δwb(r) (в нашем примере около 8 раз), в связи с чем при формировании величины θ(k) им можно пренебречь. Это видоизменит (24):
Предположим, что условие срабатывания (15) выполнилось на первом же отсчете окна фильтра. Тогда, по мере продвижения отсчета с импульсной помехой (r-го отсчета) вглубь окна фильтра последовательно формируются следующие отношения с учетом (6) и (23):
Отношения разностей, как видно из (26), не зависят от величины импульсной помехи b. После выполнения условия срабатывания (15) каждое из отношений может служить индикатором отсчета с импульсной помехой. Достаточно задаться порогом для отношений hθ и сравнивать с ним абсолютные значения отношений θ(k):

где ζθ≥1 - коэффициент чувствительности порога hθ. Например, если принять ζθ=1 и hθ=1,5, то способ сработает на (r+3)-м отсчете, когда |θ(r+3)|=1<1,5. Способ определит, что импульсная помеха находится на отсчете, отстоящем на три отсчета назад с момента срабатывания условия (27).
Конечно, при большой импульсной помехе условие (15) будет выполняться сразу, как только отсчет с импульсной помехой окажется в окне фильтра (6). Но при малых уровнях импульсной помехи, как это видно из (23), условие (15) будет выполняться скорее на (r+2)-ом отсчете, когда реакция фильтра на импульсную помеху достигает максимального значения по модулю. Поэтому было бы разумно выбирать порог hθ исходя из уровня отношений после (r+2)-го отсчета, т.е. по |θ(r+3)| или |θ(r+4)|. Как следует из (26), порог hθ должен быть либо меньше 2, но больше 1, либо меньше 1, но больше 
После определения места импульсной помехи в окне фильтра отсчет с импульсной помехой x(r) заменяется предсказанным отсчетом - оценкой. Выведем формулу для оценки отсчета 
w(r+3)=ws(r+3)+wb(r+3).
Поскольку составляющая реакции на импульсную помеху wb(r+3) существенно превосходит по абсолютному значению составляющую реакции ws(r+3) на сигнал, свободный от импульсной помехи, то последней можно пренебречь. Тогда сигнал на выходе фильтра будет представлен только реакцией фильтра на импульсную помеху, т.е. он представляет собой разность между отсчетом с импульсной помехой x(r) и отсчетом сигнала xs(r), взвешенную коэффициентом с(r):
c(r)[x(r)-xs(r)]=w(r+3).
Следовательно, оценка отсчета xs(r) формируется как

Например, на (r+3)-м отсчете [после срабатывания условия (15) на (r+2)-м отсчете] r-й отсчет с импульсной помехой в окне фильтра (6)

будет иметь вес с(r)=-4/6. Поэтому оценка предсказываемого отсчета согласно (28) формируется фильтром (6) по следующему выражению:

Таким образом, предлагаемый способ удаления импульсной помехи из электрического сигнала обладает повышенной чувствительностью к импульсной помехе и позволяет увеличить точность измерения электрического сигнала, искаженного импульсной помехой.
Предлагаемый способ может применяться, например, в цифровых системах автоматического ограничения повышения напряжения, реализованных в микропроцессорных терминалах релейной защиты и автоматики.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения частот слагаемых электрической величины асинхронного режима | 2024 |
|
RU2821152C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ИНФОРМАЦИОННОГО ОБРАЗА ЭЛЕКТРИЧЕСКОГО СИГНАЛА | 2017 |
|
RU2653150C1 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ КОРРЕКТОРА МЕЖСИМВОЛЬНОЙ ИНТЕРФЕРЕНЦИИ | 1991 |
|
RU2034404C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ ПЕРИОДИЧЕСКИХ СИГНАЛОВ | 2005 |
|
RU2283500C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ПОМЕХ В СПУТНИКОВОМ НАВИГАЦИОННОМ ПРИЕМНИКЕ | 2012 |
|
RU2513028C2 |
| СПОСОБ КОМБИНИРОВАННОЙ КАЛИБРОВКИ БЛОКА АКСЕЛЕРОМЕТРОВ | 2020 |
|
RU2758891C1 |
| Устройство синхронизации опорного колебания высокоскоростного модема | 1991 |
|
SU1800634A1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2015 |
|
RU2593276C1 |
| Устройство для определения частотных характеристик систем автоматического управления | 1980 |
|
SU892419A2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА, СПОСОБ ИДЕНТИФИКАЦИИ АБОНЕНТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ И СИСТЕМА РАДИОСВЯЗИ АБОНЕНТОВ С ЦЕНТРАЛЬНОЙ СТАНЦИЕЙ С ИДЕНТИФИКАЦИЕЙ АБОНЕНТОВ И ОПРЕДЕЛЕНИЕМ ИХ МЕСТОПОЛОЖЕНИЯ | 1997 |
|
RU2126174C1 |
Изобретение относится к области обработки электрических сигналов, а именно к методам удаления импульсной помехи из электрического сигнала. Техническим результатом предлагаемого способа является повышение чувствительности и точности определения отсчета с импульсной помехой. В способе электрический сигнал преобразуют в цифровой сигнал путем измерения его в равномерно фиксированные моменты времени, предсказывают отсчеты цифрового сигнала с помощью основного оператора линейного предсказания, формируют контрольный сигнал и, если его абсолютная величина на данном отсчете превышает порог срабатывания, считают, что найден отсчет с импульсной помехой, и заменяют его предсказанным отсчетом, с помощью дополнительного оператора линейного предсказания формируют оценки отсчетов цифрового сигнала, определяют невязки упомянутых операторов как ошибки предсказания отсчетов цифрового сигнала операторами на основе соответствующих последовательностей отсчетов, сдвинутых по времени относительно друг друга, образуют сигнал обобщенной невязки как полусумму невязок упомянутых операторов и принимают его за контрольный сигнал, причем выбирают амплитудно-фазовые частотные характеристики операторов линейного предсказания таким образом, чтобы при предсказании одного и того же отсчета сигнала, свободного от импульсной помехи, на основе одной и той же последовательности отсчетов сигнала ошибки операторов были противоположны по знаку и равны по модулю. 4 з.п. ф-лы, 5 ил.
1. Способ удаления импульсной помехи из электрического сигнала, согласно которому электрический сигнал преобразуют в цифровой сигнал путем измерения его в равномерно фиксированные моменты времени, предсказывают отсчеты цифрового сигнала с помощью основного оператора линейного предсказания, формируют контрольный сигнал и, если его абсолютная величина на данном отсчете превышает порог срабатывания, считают, что найден отсчет с импульсной помехой, и заменяют его предсказанным отсчетом, отличающийся тем, что с помощью дополнительного оператора линейного предсказания формируют соответствующие оценки отсчетов цифрового сигнала, определяют невязки упомянутых операторов как ошибки предсказания отсчетов цифрового сигнала операторами на основе соответствующих последовательностей отсчетов, сдвинутых по времени относительно друг друга, образуют сигнал обобщенной невязки как полусумму невязок упомянутых операторов и принимают его за контрольный сигнал, причем выбирают амплитудно-фазовые частотные характеристики операторов линейного предсказания таким образом, чтобы при предсказании одного и того же отсчета сигнала, свободного от импульсной помехи, на основе одной и той же последовательности отсчетов сигнала ошибки операторов были противоположны по знаку и равны по модулю.
2. Способ по п. 1, отличающийся тем, что контрольный сигнал формируется как полуразность сигналов обобщенных невязок на текущем и предыдущем отсчетах.
3. Способ по п. 1 или 2, отличающийся тем, что на каждом из последующих отсчетов после превышения модулем контрольного сигнала порога срабатывания формируют отношение разности двух соседних отсчетов контрольного сигнала на текущем отсчете к аналогичной разности на предыдущем отсчете, и, если абсолютная величина указанного отношения станет меньше заданного порога отношений, считают, что отсчет, сдвинутый назад от текущего отсчета на заданное число интервалов дискретизации, содержит импульсную помеху, причем упомянутое число интервалов сдвига назад выбирают в зависимости от уровня порога отношений.
4. Способ по п. 1, отличающийся тем, что в качестве операторов линейного предсказания берут линейные фильтры-интерполяторы, формирующие оценки отсчетов путем интерполяции кривой сигнала по его отсчетам с помощью полиномов.
5. Способ по п. 1, отличающийся тем, что в качестве операторов линейного предсказания берут заграждающие фильтры гармоник.
| US 4587620A, 06.06.1986 | |||
| US 4528678A1, 09.07.1985 | |||
| Способ сборки торцешлифовального круга | 1979 |
|
SU1100077A1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ЗАКОДИРОВАННОЙ РЕЧИ | 2007 |
|
RU2343563C1 |

