Изобретение относится к радиолокации, может быть использовано в радиолокационных станциях (РЛС) малой дальности дециметрового диапазона и предназначено для выделения движущихся на фоне пассивных помех целей.
Первичная временная обработка сигналов в импульсных радарах обзорного типа складывается, как известно, из внутри- и межпериодной фильтрации принимаемой смеси [1]. Внутрипериодная обработка заключается, как правило, в согласованной (или близкой к согласованной) фильтрации одиночного импульса пачки. При этом некоторое отклонение от согласованной фильтрации имеет целью снижение уровня боковых лепестков сжатого импульса, а также [2] - минимизацию средних по времени прихода полезного сигнала потерь в отношении сигнал / шум, вызванных временной дискретизацией процесса.
Гораздо большее многообразие подходов встречается при реализации межпериодной обработки. Оно обусловлено как характером решаемых задач, так и имеющимися в распоряжении вычислительными (аппаратурными) ресурсами, и связано с необходимостью селекции полезных и мешающих сигналов по частоте Доплера. Такая селекция предполагает как подавление (режекцию) пассивных помех, так и накопление полезного сигнала с возможным измерением радиальной скорости обнаруживаемых объектов.
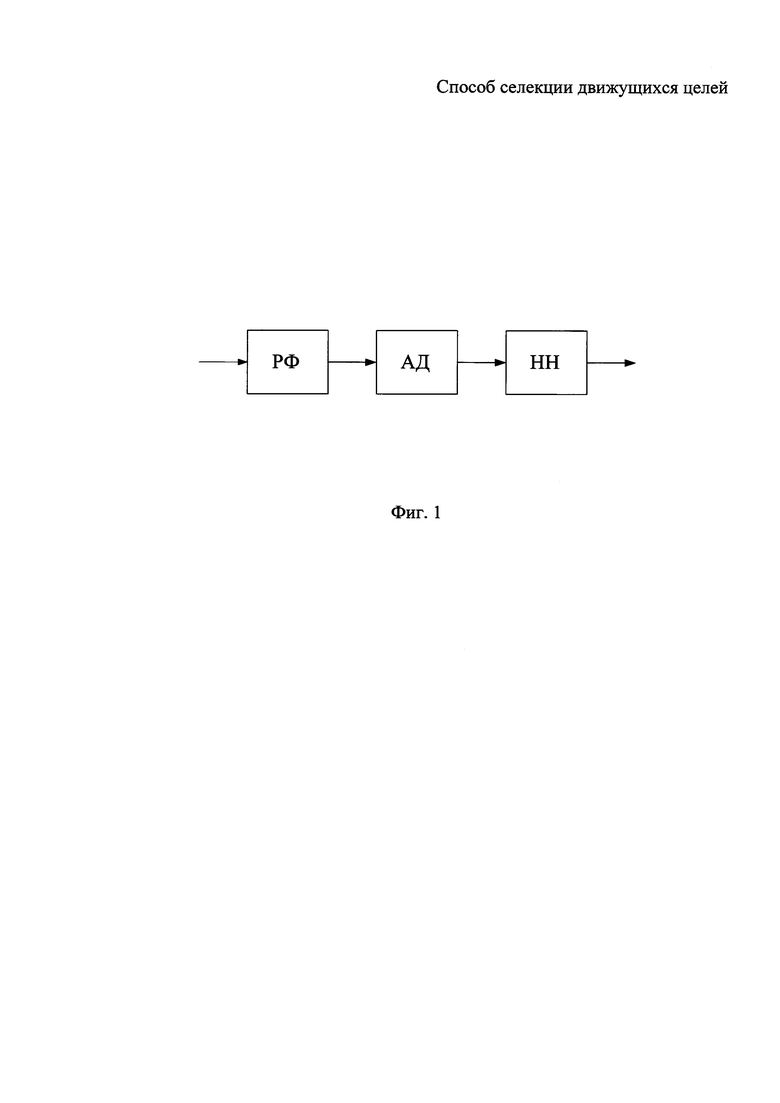
Один из подходов [3] к синтезу такой межпериодной обработки состоит в ее разбиении на два этапа: предварительная когерентная режекция пассивных помех с последующим некогерентным (или частично когерентным) накоплением полезных сигналов. Структурная схема устройства, реализующего обработку сигнала в этом случае, имеет вид, приведенный на фигуре 1, где РФ - режекторный фильтр пассивной помехи; АД - амплитудный детектор; НН - некогерентный накопитель пачки импульсов полезного сигнала.
Режекторный фильтр в этой схеме может быть реализован, например, на основе принципа линейного предсказания одного из импульсов пачки пассивной помехи по соседним импульсам, когда вектор коэффициентов фильтра определяется из уравнения Юла-Уолкера [1, с. 384], [4, с. 226]

где W - весовой вектор РФ; R - корреляционная матрица пассивной помехи размера (L+1)×(L+1); L - порядок фильтра, выбираемый из условия требуемого подавления; Qn - вектор-столбец, n-ая компонента которого (соответствующая предсказываемому отсчету пассивной помехи) равна единице, а остальные - нулю.
Применение в данном случае некогерентного накопителя обусловлено, как правило, тем, что многоканальное когерентное накопление неприемлемо из-за больших аппаратурных затрат.
Описанный способ является, по-видимому, наиболее экономичным в вычислительном плане, поскольку содержит всего один канал обработки. Однако очевидны и недостатки этого способа, связанные с потерями в отношении сигнал / собственный шум по сравнению с оптимальной обработкой сигнала только на фоне собственного шума. (Подчеркнем, что как здесь, так и в дальнейшем, остаток пассивной помехи после подавления предполагается пренебрежимо малым по сравнению с собственным шумом, вследствие чего на первый план выступают потери в отношении сигнал / собственный шум, возникающие как плата за подавление помехи.)
В рассматриваемом случае указанные потери возникают из-за межпериодной корреляции первоначально некоррелированного собственного шума, вносимой режекторным фильтром пассивной помехи, что при последующем некогерентном накоплении приводит к потерям порядка (2÷3) дБ [5]. Если учесть при этом еще и потери на некогерентное накопление (по сравнению с когерентным), которые имеют место даже при некоррелированном собственном шуме (см., например, [1]), то данный алгоритм межпериодной обработки может оказаться неприемлемым во многих практических приложениях.
Часто на практике приведенный на фигуре 1 способ межпериодной временной обработки применяется и в том случае, когда интервал когерентности принимаемой пачки импульсов превышает ее длительность, то есть пачка полностью когерентна. Использование некогерентного накопителя в этом случае обусловлено только тем, что когерентная межпериодная фильтрация, будучи необходимо многоканальной, оказывается неприемлемой из-за больших аппаратурных (вычислительных) затрат. В этой ситуации, разумеется, нужно считаться с потерями в обнаружении полезных сигналов, возникающими в результате замены полностью когерентной обработки на частично когерентную [5].
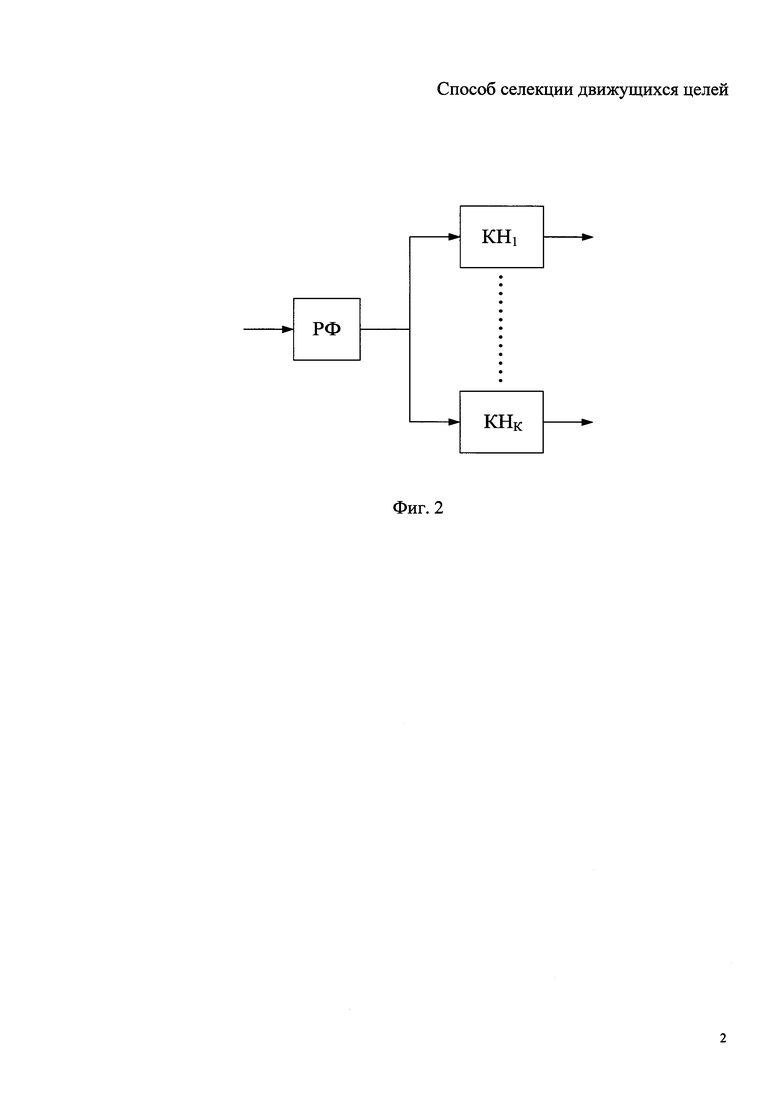
Наиболее близкий подход к синтезу такой межпериодной обработки, т.е. прототип, состоит в том, что при условии достаточно высокой степени когерентности всей принимаемой пачки импульсов двухступенчатая межпериодная временная обработка сигналов обеспечивается с ее разбиением на когерентную режекцию пассивной помехи и накопление полезного сигнала, реализованное полностью когерентным способом с помощью параллельного набора когерентных накопителей, каждый из которых соответствует полезному сигналу с определенной частотой Доплера. В результате структурная схема обработки имеет вид, приведенный на фигуре 2, где РФ - режекторный фильтр помехи, КН - когерентный накопитель, К - количество когерентных накопителей. Подход к реализации режекторного фильтра базируется на векторе линейного предсказания (1).
Еще один подход к реализации межпериодной обработки состоит в когерентном накоплении полезного сигнала с помощью дискретного преобразования Фурье всей пачки принимаемых импульсов после предварительного применения к ней какой-либо весовой функции (Дольфа-Чебышева, Кайзера-Бесселя и др. [4]). Это позволяет получить низкий уровень боковых лепестков частотной характеристики межпериодного фильтра всюду вне ее главного пика и, следовательно, эффективно подавить и пассивную помеху.
Однако применение весового окна приводит к рассогласованию доплеровского межпериодного фильтра с полезным сигналом и порождает, тем самым, потери в отношении сигнал / собственный шум, которые, например, при требовании к уровню боковых лепестков минус 60 дБ составляют около 2 дБ [6]. Кроме того, применение весового окна приводит к расширению главного пика частотной характеристики по сравнению с согласованным фильтром, что с учетом еще и потерь в отношении сигнал / шум снижает как точность измерения радиальной скорости обнаруживаемых объектов, так и разрешающую способность по этой координате. Эти недостатки являются, очевидно, платой за поддержание низкого уровня боковых лепестков передаточной характеристики межпериодного фильтра во всем заданном диапазоне изменения частоты Доплера радиолокационных объектов.
Как известно, низкий уровень боковых лепестков частотной характеристики нужен обычно только в полосе частот, занимаемой сильной пассивной помехой, тогда как вне этого интервала их уровень, достаточный для решения многих практических задач, может быть значительно выше, например, минус (10÷20) дБ. Такая частотная характеристика в заявленном способе получена с помощью линейной фильтрации в соответствии с весовым вектором [1]

где R - корреляционная матрица суммы векторов пассивной помехи и собственного шума,  - вектор полезного сигнала,
- вектор полезного сигнала,  - частота Доплера полезного сигнала.
- частота Доплера полезного сигнала.
Фильтрация (2) является оптимальной по критерию максимума отношения сигнал / (пассивная помеха + собственный шум) при любом статистическом распределении мешающих сигналов, и оптимальной в байесовском смысле при совместно гауссовом их распределении [1].
Применение вектора (2) при синтезе межпериодной временной обработки на практике предполагает знание конкретного вида матрицы R, который далеко не всегда известен в силу априорной неопределенности относительно формы спектра мощности пассивной помехи (или, что одно и то же, - относительно формы ее корреляционной функции). С другой стороны, при реализации радара задается, как правило, требование глубокой режекции пассивных помех в некотором диапазоне изменения их доплеровских частот независимо от формы спектра мощности подавляемых эхо-сигналов.
В связи с этим заслуживает внимания квазиоптимальный подход к синтезу межпериодной временной обработки, основанный на аппроксимации сигнала пассивной помехи его проекцией на конечномерное подпространство. Базисом этого подпространства является совокупность дискретных (во времени) комплексных синусоид, частоты которых перекрывают с некоторым шагом заданный диапазон изменения частоты Доплера пассивных помех.
Достигаемым техническим результатом является повышение эффективности помехозащищенности РЛС при наличии пассивных помех за счет минимизации потерь при обнаружении полезного сигнала.
Указанный технический результат достигается тем, что в известном способе межпериодной обработки, основанном на предварительной когерентной режекции пассивной помехи и последующем накоплении полезного сигнала с помощью многоканальной системы когерентных межпериодных фильтров, каждый из которых согласован с некоторой частотой Доплера сигнала, осуществляют аппроксимацию сигнала пассивной помехи его проекцией на конечномерное подпространство и вывод весового вектора по следующей формуле:

где E - единичная матрица;
P=S(SHS)-1SH - матрица-проектор на подпространство помехи;
S - матрица, составленная из векторов столбцов  , частоты Доплера которых
, частоты Доплера которых  с некоторым шагом перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления;
с некоторым шагом перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления;
 - вектор полезного сигнала,
- вектор полезного сигнала,  - частота Доплера полезного сигнала,
- частота Доплера полезного сигнала,
а также производят последующее когерентное накопление полезного сигнала, после чего из полученного сигнала выделяют полезный сигнал с помощью заданного порога на пороговом устройстве.
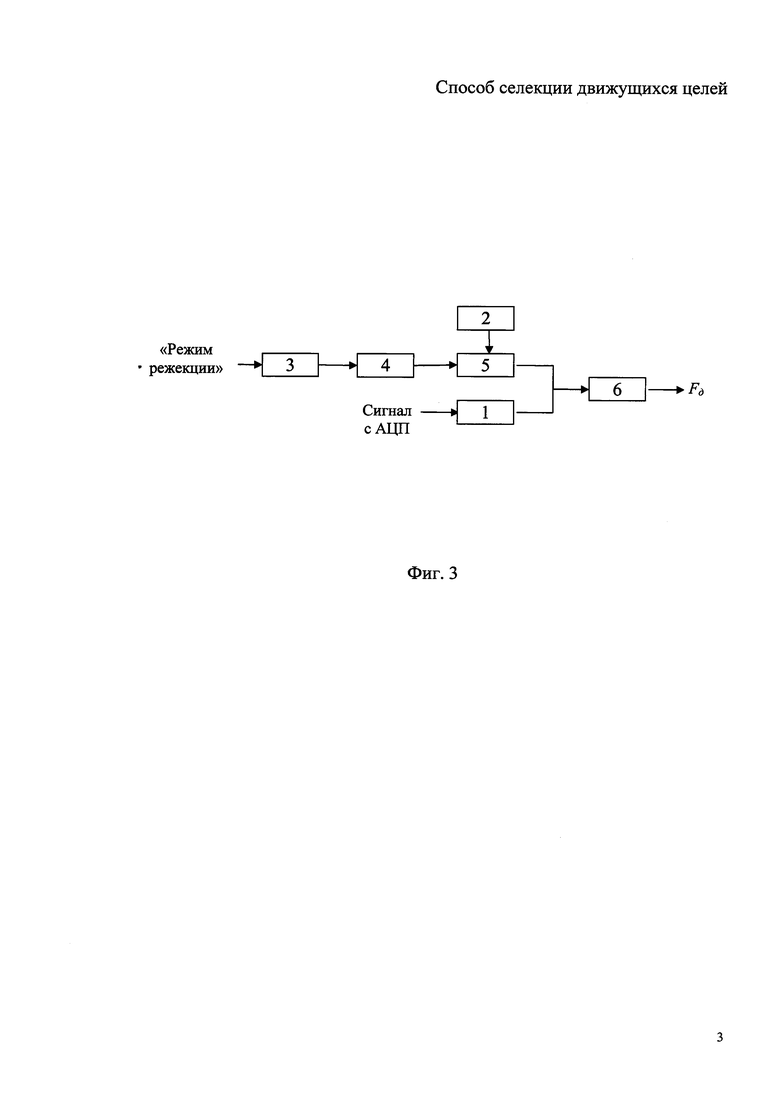
РФ может быть реализован в структурном виде, представленном на фигуре 3. РФ содержит блок 1 формирования входных данных, представляющих собой вектор, соответствующий принимаемому азимутальному пакету, блок 2 формирования вектора полезного сигнала, который имеет межпериодную временную структуру, характеризуемую вектором дискретной синусоиды, блок 3 управления шириной зоны режекции, который заключается в формировании матрицы, составленной из векторов-столбцов сигналов, частоты Доплера которых с некоторым шагом перекрывают диапазон частот пассивной помехи, блок 4 формирования матрицы-проектора на подпространство помехи, действие которой на любую линейную комбинацию векторов полезного сигнала приводит к ее занулению, блок 5 формирования весового вектора оптимальной обработки, который формируется путем умножения обратной корреляционной матрицы и вектора полезного сигнала, блок 6 вычисления частоты Доплера цели Fд, вычисленной умножением эрмитово-сопряженного вектора, соответствующего принимаемому азимутальному пакету, и весового вектора оптимальной обработки.
РФ работает следующим образом: сигнал с аналого-цифрового преобразователя (АЦП) поступает на блок 1 формирования входных данных, представляющих собой вектор, соответствующий принимаемому азимутальному пакету. В блоке 2 формируется вектор полезного сигнала  .
.
В зависимости от поставленной цели обнаружения определенных воздушных объектов, имеющих различные скорости, и сигнально-помеховой обстановки оператор РЛС назначает «режим режекции», который соответствует определенной ширине зоны режекции пассивных помех. Код «режима режекции» поступает на вход блока 3. В зависимости от выбранного «режима режекции» в блоке 3 формируется матрица S, составленная из минимально необходимого числа векторов столбцов  , частоты Доплера которых
, частоты Доплера которых  перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления. В блоке 4 формируется матрица-проектор на подпространство помехи P=S(SHS)-1SH, действие которой на любую линейную комбинацию синусоид
перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления. В блоке 4 формируется матрица-проектор на подпространство помехи P=S(SHS)-1SH, действие которой на любую линейную комбинацию синусоид  приводит к ее занулению (подавлению пассивной помехи). Затем на первый и второй входы блока 5 приходят данные с блоков 4 и 2 соответственно, где путем замены априори неизвестной обратной корреляционной матрицы R-1 ее реалистической аппроксимацией и умножением на вектор полезного сигнала формируют весовой вектор оптимальной обработки
приводит к ее занулению (подавлению пассивной помехи). Затем на первый и второй входы блока 5 приходят данные с блоков 4 и 2 соответственно, где путем замены априори неизвестной обратной корреляционной матрицы R-1 ее реалистической аппроксимацией и умножением на вектор полезного сигнала формируют весовой вектор оптимальной обработки  . Далее посредством данных блока 1 и блока 5 в блоке 6 умножением эрмитово-сопряженного вектора, соответствующего принимаемому азимутальному пакету, и весового вектора оптимальной обработки вычисляется частота Доплера Fд.
. Далее посредством данных блока 1 и блока 5 в блоке 6 умножением эрмитово-сопряженного вектора, соответствующего принимаемому азимутальному пакету, и весового вектора оптимальной обработки вычисляется частота Доплера Fд.
Сущность предлагаемого метода состоит в следующем. Известно [9], что комплексная амплитуда отраженного от точечного объекта радиолокационного сигнала (в предположении его полной когерентности) имеет межпериодную временную структуру, характеризуемую вектором дискретной синусоиды

где  - частота Доплера, T - период зондирования радиолокационных импульсов, N - количество импульсов в принимаемой пачке.
- частота Доплера, T - период зондирования радиолокационных импульсов, N - количество импульсов в принимаемой пачке.
При этом сигнал пассивной помехи представляет собой комбинацию множества синусоид вида (3), образующих континуум по частоте Доплера. В самом деле, например, листва деревьев при наличии ветра или метеообразования, возникающие в условиях турбулентной воздушной среды, содержат точечные отражающие объекты, имеющие практически непрерывное распределение по радиальной скорости [8]. Тем не менее, ясно, что этот континуум может быть аппроксимирован конечным набором синусоид при достаточно плотной их расстановке по частоте Доплера.
В математическом плане такое приближение эквивалентно проецированию сигнала пассивной помехи на конечномерное подпространство, после чего он может быть представлен в виде линейной комбинации конечного числа комплексных синусоид (3) с частотами Доплера  . Векторы синусоид при этом имеют случайные и статистически независимые амплитудные множители a
1, a
2, …, a
M, где M - число используемых для аппроксимации пассивной помехи синусоид. Здесь, разумеется, должно выполняться условие M<N, иначе введенное подпространство совпадет со всем N-мерным пространством, и селекция полезных сигналов и помех станет невозможной.
. Векторы синусоид при этом имеют случайные и статистически независимые амплитудные множители a
1, a
2, …, a
M, где M - число используемых для аппроксимации пассивной помехи синусоид. Здесь, разумеется, должно выполняться условие M<N, иначе введенное подпространство совпадет со всем N-мерным пространством, и селекция полезных сигналов и помех станет невозможной.
Тогда корреляционная матрица вектора мешающих сигналов (то есть суммы пассивной помехи и собственного шума) может быть представлена в виде

где E - единичная матрица размерности N×N, характеризующая корреляционные свойства собственного шума (без потери общности мощность отдельной компоненты вектора шума будем полагать равной единице); νm=<|a
m|2> - мощность m-ой синусоиды пассивной помехи. Причем будем считать, что νm>>1, то есть мощность внешней помехи на частоте Доплера  , существенно превышает мощность собственного шума, что обычно имеет место на практике.
, существенно превышает мощность собственного шума, что обычно имеет место на практике.
Поскольку матрица (4) является эрмитовой и положительно определенной, то обратная по отношению к ней матрица может быть представлена спектральным разложением

где λm - ненулевые собственные значения второго слагаемого в правой части (4), сумма которых определяет мощность пассивной помехи; U1, …, UM - ортонормированные собственные векторы, соответствующие этим собственным значениям и являющиеся базисом в подпространстве помехи; UM+1, …, UN - ортонормированные собственные векторы матрицы R, которые образуют базис в подпространстве, ортогональном пассивной помехе.
Поскольку пассивная помеха по предположению является сильной, то справедливо неравенство λm>>1, что позволяет пренебречь первым слагаемым в правой части (5), после чего получаем аппроксимацию обратной матрицы в виде

что является проектором на ортогональное пассивной помехе подпространство [7]. Действие оператора (6) на любую линейную комбинацию синусоид  приводит к ее аннулированию.
приводит к ее аннулированию.
При практической реализации этого способа нет необходимости для определения оператора (6) прибегать к трудоемкой процедуре отыскания собственных векторов и собственных значений матрицы (4), поскольку проектор на ортогональное пассивной помехе подпространство может быть представлен в виде [7]

где E - единичная матрица;
P=S(SHS)-1SH - матрица-проектор на подпространство помехи;
S - матрица, составленная из векторов столбцов  , частоты Доплера которых
, частоты Доплера которых  с некоторым шагом перекрывают диапазон частот пассивной помехи.
с некоторым шагом перекрывают диапазон частот пассивной помехи.
Следует подчеркнуть, что (7) не зависит от мощностей синусоид, образующих пассивную помеху, вследствие чего отпадает необходимость в каких-либо априорных предположениях о форме ее спектра. При этом параметры зоны режекции регулируются только количеством и расстановкой нулей передаточной характеристики, координаты которых определяются частотами  .
.
С учетом приближения (7) оптимальный весовой вектор межпериодной обработки примет вид

а оптимальная процедура обработки будет состоять в вычислении модуля выражения

где Y - вектор, соответствующий принимаемому азимутальному пакету.
При этом матрица-проектор (7) выполняет функцию режектора пассивной помехи и является общей для всех доплеровских фильтров. Нули зоны режекции определяются значениями частот  векторов, образующих матрицу S в выражении (7).
векторов, образующих матрицу S в выражении (7).
Заключительным этапом заявляемого способа является сравнение полученной в процессе обработки сигнала в РФ решающей статистики, с некоторым порогом. В зависимости от результата сравнения и принимается решение о наличии или отсутствии полезного сигнала в данном элементе разрешения.
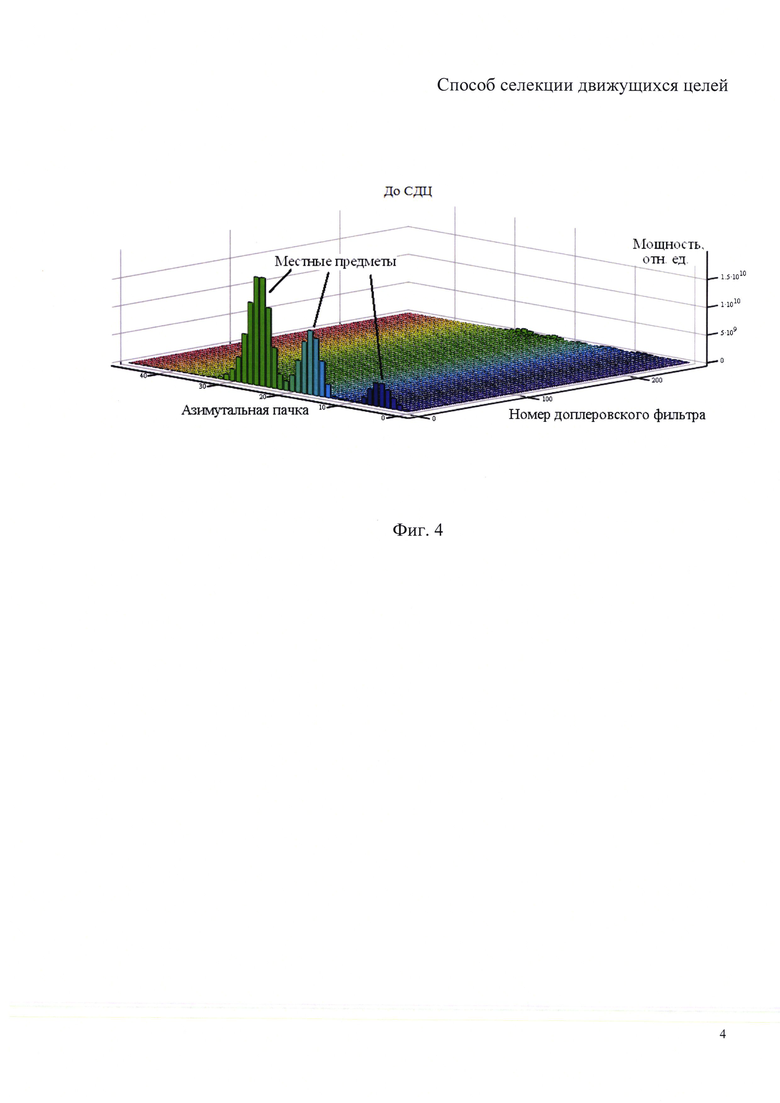
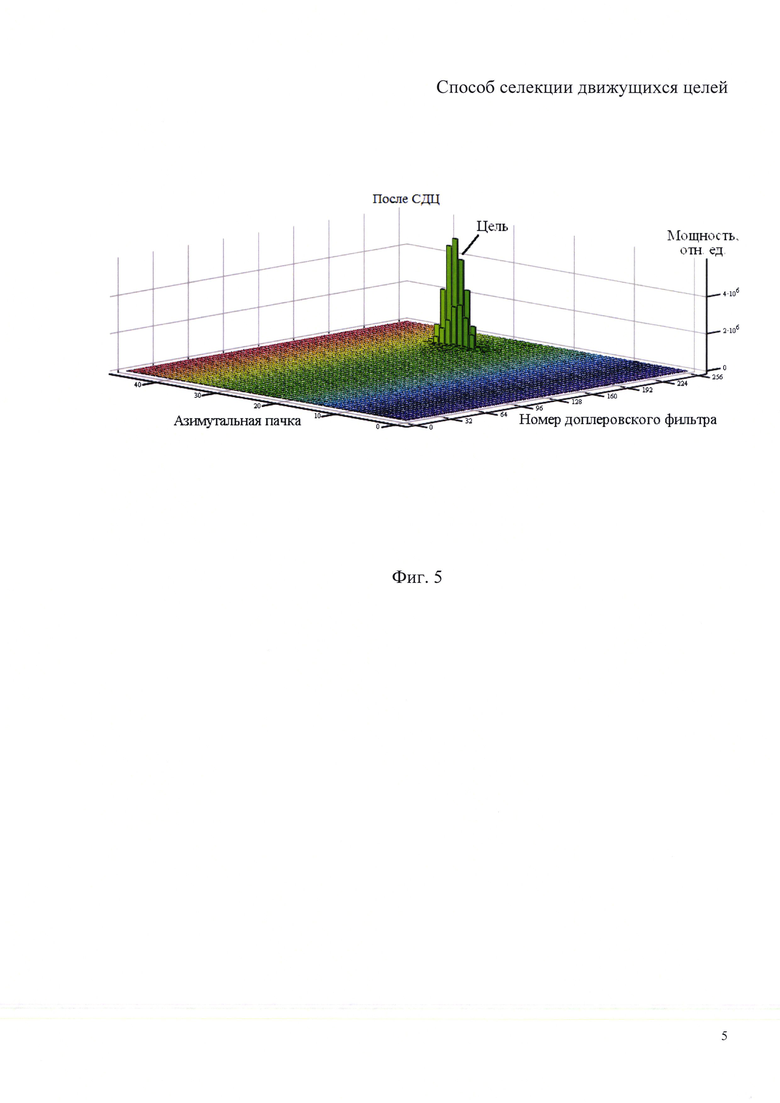
На фигурах 4-5 показан вид двумерной первичной обработки до селекции движущихся целей и после.
Таким образом, синтезированный способ временной обработки (7) существенно превосходит по своим характеристикам известные квазиоптимальные методы межпериодной фильтрации полезного сигнала на фоне собственного шума и пассивной внешней помехи. Вытекая из оптимального способа (2) путем замены в нем априори неизвестной матрицы R ее реалистической аппроксимацией, предлагаемый способ имеет, по сути, байесовскую структуру, что и обусловливает его высокую эффективность в части повышения эффективности помехозащищенности РЛС при наличии пассивных помех.
Список литературы
1. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981.
2. Михеев П.В. Оптимальный по критерию отношения сигнал / шум аналого-дискретный фильтр // Радиолокация, навигация, связь. XI Международная научно-техническая конференция. 12-14 апреля 2005 г. Т. 1. Воронеж, 2005. с. 20-28.
3. Проскурин В.И. Квадратичные фильтры для обнаружения неизвестного сигнала на фоне коррелированной помехи. - Радиотехника и электроника, 1992, №7.
4. Марпл-мл. С.Л. Цифровой спектральный анализ и его приложение: Пер. с англ. - М.: Мир, 1990.
5. Транк Дж.В. Коэффициент потерь при накоплении шумов в системах СДЦ. ТИИЭР, 1977, т. 65, №11, с. 115-116.
6. Гольденберг Л.М., Матюшкин Б.Д., Поляк М.Н. Цифровая обработка сигналов. Справочник. - М.: Радио и связь, 1985.
7. Ланкастер П. Теория матриц: Пер. с англ. - М.: Наука, 1982.
8. Бакулев П.А. Методы и устройства селекции движущихся целей / П.А. Бакулев, В.М. Степин. - М.: Радио и связь, 1986. - 288 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ селекции движущихся целей | 2022 |
|
RU2820302C1 |
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ МНОГОКОМПОНЕНТНЫХ ПАССИВНЫХ ПОМЕХ | 2015 |
|
RU2593146C1 |
| Способ адаптивной обработки сигналов в обзорных когерентно-импульсных радиолокационных станциях | 2019 |
|
RU2704789C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| Способ пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции с активной фазированной антенной решеткой | 2018 |
|
RU2735216C2 |
| УСТРОЙСТВО СЕЛЕКЦИИ МЕШАЮЩИХ ОТРАЖЕНИЙ ОТ ОПТИЧЕСКИ НЕНАБЛЮДАЕМЫХ ОБЪЕКТОВ ("АНГЕЛОВ") | 2006 |
|
RU2308736C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ МЕШАЮЩИХ ОТРАЖЕНИЙ ОТ ОПТИЧЕСКИ НЕНАБЛЮДАЕМЫХ ОБЪЕКТОВ ("АНГЕЛОВ") В ЗОНЕ "МЕСТНЫХ" ПРЕДМЕТОВ | 2012 |
|
RU2498337C1 |
| Способ когерентного накопления пачки отраженных сигналов в сканирующей радиолокационной станции | 2022 |
|
RU2798025C1 |
| СПОСОБ И УСТРОЙСТВО ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ РЕЖЕКЦИИ ПОМЕХ В АППАРАТУРЕ ПОТРЕБИТЕЛЕЙ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2023 |
|
RU2804922C1 |
| Способ подавления пассивных помех с малым доплеровским смещением | 2019 |
|
RU2729886C1 |
Изобретение относится к радиолокации, может быть использовано в радиолокационных станциях (РЛС) малой дальности дециметрового диапазона и предназначено для выделения движущихся на фоне пассивных помех целей. Достигаемый технический результат - повышение эффективности помехозащищенности РЛС при наличии пассивных помех за счет минимизации потерь при обнаружении полезного сигнала. Указанный технический результат достигается тем, что в известном способе межпериодной обработки, основанном на предварительной когерентной режекции пассивной помехи и последующем накоплении полезного сигнала с помощью многоканальной системы когерентных межпериодных фильтров, каждый из которых согласован с некоторой частотой Доплера сигнала, осуществляют аппроксимацию сигнала пассивной помехи его проекцией на конечномерное подпространство и вывод весового вектора по определенной формуле, а также производят последующее когерентное накопление полезного сигнала, после чего из полученного сигнала выделяют полезный сигнал с помощью заданного порога на пороговом устройстве. 5 ил.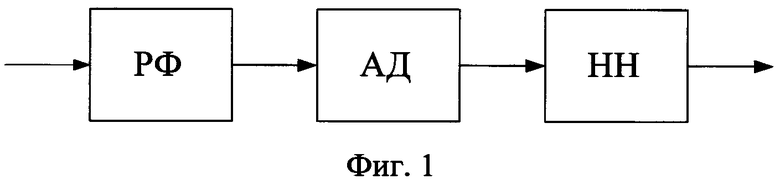
Способ селекции движущихся целей, включающий предварительную когерентную режекцию пассивной помехи и последующее накопление полезного сигнала с помощью многоканальной системы когерентных межпериодных фильтров, каждый из которых согласован с некоторой частотой Доплера сигнала, отличающийся тем, что осуществляют аппроксимацию сигнала пассивной помехи его проекцией на конечномерное подпространство и вывод весового вектора по формуле:

где E - единичная матрица;
P=S(SHS)-1SH - матрица-проектор на подпространство помехи;
S - матрица, составленная из векторов столбцов  , частоты Доплера которых
, частоты Доплера которых  с некоторым шагом перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления;
с некоторым шагом перекрывают диапазон частот пассивной помехи, чтобы обеспечить заданный коэффициент подавления;
 - вектор полезного сигнала,
- вектор полезного сигнала,  - частота Доплера полезного сигнала,
- частота Доплера полезного сигнала,
а также производят последующее когерентное накопление полезного сигнала, после чего из полученного сигнала выделяют полезный сигнал с помощью заданного порога.
| ПРОСКУРИН В.И | |||
| Квадратичные фильтры для обнаружения неизвестного сигнала на фоне коррелированной помехи | |||
| Радиотехника и электроника, 1992, N7 | |||
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2013 |
|
RU2537696C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1999 |
|
RU2143709C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1991 |
|
RU2255354C2 |
| US 5357256 A, 18.10.1994 | |||
| US 7903024 B2, 08.03.2011 | |||
| JP 2004347362 A, 09.12.2004. | |||

