Изобретение относится к области приборостроения и может быть использовано при тестировании и проверке работоспособности чувствительных элементов инерциальных систем навигации.
Известны способы скалярной калибровки и векторной калибровки, описанные соответственно в статьях «О скалярной калибровке блока акселерометров и гироскопов» В.В. Аврутов, Вестник НТУУ «КПИ», 2010, серия «ПРИКЛАДОБОРУДОВАНИЕ», вып. 40, с. 10-17 (принято за прототип изобретения), и «Сравнение методов оценки параметров погрешностей блока акселерометров трехосной гиростабилизированной платформы» Гребенкин М.Д., Труды ФГУП "НПЦАП". Системы и приборы управления, 2017, No 4, с. 22-31 (принято за аналог изобретения).
В них рассматривается калибровка набора из трех взаимно ортогональных акселерометров. В качестве оцениваемых при калибровке параметров модели ошибок акселерометров рассматриваются отклонения масштабных коэффициентов, нулей и угловые параметры, описывающие ошибку выставки оси чувствительности датчика в приборной системе координат (по одному или по два на каждый из датчиков, в зависимости от метода). Блок акселерометров последовательно приводят угловые положения на неподвижном стенде, снимая измерения. В аналоге (векторный метод калибровки) получают измерения каждого акселерометра в отдельности и сравнивают с ожидаемыми в данном положении и географической точке. В прототипе (скалярный метод калибровки) для каждого момента измерения вычисляется модуль измеренного кажущегося ускорения и результат сравнивается с модулем вектора ускорения силы тяжести в данной географической точке. В обоих методах предполагается, что разности (невязки) между измеренными и ожидаемым величинами обусловлены отклонениями рассматриваемых параметров модели погрешности датчиков. С помощью ряда Тейлора невязки измерений линейно связываются с отклонениями оцениваемых параметров от их номинальных величин. После проведения достаточного количества измерений, получают несовместную систему линейных уравнений, которую можно решить приближенно. Результатом калибровки является получаемое приближенное решение, т.е. коррекция для рассматриваемого набора параметров.
Недостатком аналога является сильное влияние на точность оценки ошибок при выставке калибруемого блока в калибровочные угловые положения. Недостатком прототипа является ненаблюдаемость всех параметров модели погрешностей, описывающих ошибки выставки осей чувствительности акселерометров в приборной системе координат. Следствием этого является необходимость принимать положение оси чувствительности одного из акселерометров идеальным, то есть безошибочно совпадающим с одной из осей приборной системы координат. Это в свою очередь приводит к ошибке в привязке блока акселерометров к системе отсчета объекта управления и формированию дополнительных погрешностей в навигационных данных.
Задачей изобретения является повышение точности калибровки блока акселерометров за счет повышения устойчивости оценки к неучтенным погрешностям в калибровочных измерениях без потери наблюдаемости ряда параметров модели погрешностей акселерометров.
Заявленная задача выполняется в способе комбинированной калибровки блока акселерометров заключающемся в том, что в различных угловых положениях блока производят измерения кажущегося ускорения, обусловленного силой тяжести, а также рассчитывают квадраты абсолютной величины измеренного ускорения, решением калибровочной системы уравнений с помощью фильтра Калмана оценивают вектор отклонения параметров модели акселерометров и выполняют калибровку акселерометров, согласно изобретению, формируют массив невязок между измеренными и соответствующими ожидаемыми значениями проекций ускорения на оси чувствительности акселерометров, и невязок между рассчитанными и ожидаемыми значениями квадрата абсолютной величины кажущегося ускорения, полученный массив линейно связывают с вектором отклонений параметров, формируя комбинированную калибровочную матрицу системы уравнений, включающей в себя уравнения линейной связи вектора отклонения параметров с указанными невязками, а фильтр Калмана применяют с диагональной матрицей ковариации измерительного шума, в которой величина ковариации шума квадрата полученной абсолютной величины ускорения равна единице, а величины ковариаций шума измерений ускорения равны 106.
Для решения задачи результат каждого измерения используется для формирования 4-х уравнений в калибровочной системе уравнений. Три из них формируются по методу векторной калибровки и обеспечивают наблюдаемость всех параметров, необходимых для описания выставки осей чувствительности в приборной системе координат, привязанной к блоку. Четвертое формируется по методу скалярной калибровки и позволяет получить оценку, устойчивую к возмущениям в векторе измерений, вызванных неучтенными факторами.
Векторный метод калибровки позволяет оценить для каждого акселерометра 4 параметра модели погрешностей: смещение нуля, отклонение масштабного коэффициента и два угловых параметра ошибки выставки оси чувствительности в приборной системе координат.
Калибровочная система уравнений для векторного метода имеет вид:
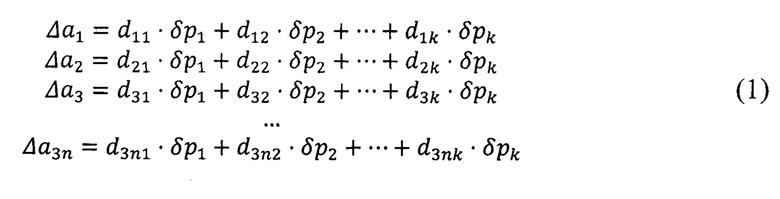
где:
Δai, i=1..3n - отклонение полученного измерения одного акселерометра от ожидаемой величины;
δpj, j=1..k - оцениваемые отклонения параметров модели погрешностей от номинальных значений (всего к параметров для векторного метода);
dij, i=1..3n, j=1..k - элементы матрицы калибровки D, представляющие собой производные выходной величины акселерометра по величине параметра pj при его номинальном значении; n - количество моментов снятия измерений.
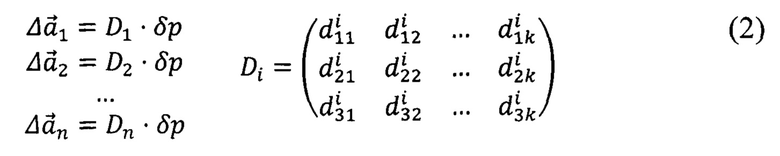
При этом система уравнений будет делиться на блоки по 3 уравнения, соответствующие единовременному снятию измерений с тройки акселерометров в момент времени ti:
Для скалярного метода решаемая система будет иметь вид:

где Δsi, i=1..n - отклонение измеренного модуля кажущегося ускорения от ожидаемой величины. При этом вектор оцениваемых параметров р для скалярного метода будешь меньше чем в случае векторного метода, так как три из шести угловых параметров одного акселерометра будут ненаблюдаемы.
Получение комбинированной модели в виде новой матрицы калибровки Dкомб может быть выполнено совмещением двух систем уравнений в одну. При этом приближенный вектор решения должен удовлетворять одновременно уравнениям обеих моделей по условию несмещенного вектора невязки (с нулевым средним).
Из за разницы рангов матриц скалярного и векторного методов, матрицу системы скалярного метода необходимо дополнить новыми столбцами, соответствующими трем ненаблюдаемым параметрам угловых ошибок выставки осей чувствительности ругл1, ругл2, ругл3 по применяемой схеме линеаризации:

Итоговая система уравнений будет строиться блоками по четыре уравнения, три из которых описывают влияние отклонений параметров на показания каждого акселерометра по отдельности, а четвертое описывает влияние отклонений на сумму квадратов этих показаний:

Три уравнения, соответствующих векторному способу калибровки, позволят сформировать оценки отклонений 6 угловых параметров по отдельности, а четвертое уравнение, соответствующее скалярной калибровке, не позволит получить их сильно смещенную оценку, так как определяет величины их линейных комбинаций и при этом является устойчивым к ошибке изначальной угловой выставки платформы в пространстве.
Для того, чтобы получаемая оценка в равной степени соответствовала как векторной, так и скалярной части системы, оценку необходимо проводить со взвешиванием. Для этого удобно использовать алгоритм фильтра Калмана, где взвешивание можно произвести, задавая нужный вид матрице ковариации измерительного шума R:
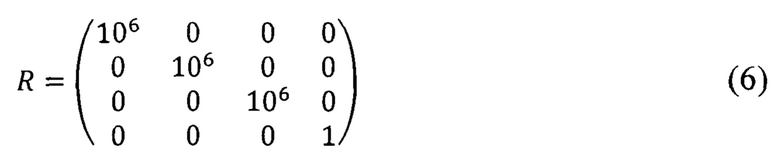
Результатом калибровки является полученное с помощью алгоритма фильтра Калмана приближенное решение калибровочного уравнения, составленного описанным способом.
Таким образом, заявлен способ комбинированной калибровки блока акселерометров заключающийся в том, что в различных угловых положениях блока производят измерения кажущегося ускорения, обусловленного силой тяжести, а также рассчитывают квадраты абсолютной величины измеренного ускорения, решением калибровочной системы уравнений с помощью фильтра Калмана оценивают вектор отклонения параметров модели акселерометров и выполняют калибровку акселерометров. Отличительная особенность способа заключается в том, что формируют массив невязок между измеренными и соответствующими ожидаемыми значениями проекций ускорения на оси чувствительности акселерометров, и невязок между рассчитанными и ожидаемыми значениями квадрата абсолютной величины кажущегося ускорения, полученный массив линейно связывают с вектором отклонений параметров, формируя комбинированную калибровочную матрицу системы уравнений, включающей в себя уравнения линейной связи вектора отклонения параметров с указанными невязками, а фильтр Калмана применяют с диагональной матрицей ковариации измерительного шума, в которой величина ковариации шума квадрата полученной абсолютной величины ускорения равна единице, а величины ковариаций шума измерений ускорения равны 106.
Техническим результатом изобретения является повышение точности калибровки блока акселерометров за счет повышения устойчивости оценки к неучтенным возмущениям в калибровочных измерениях без потери наблюдаемости ряда параметров модели погрешностей акселерометров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СКАЛЯРНОЙ КАЛИБРОВКИ БЛОКА АКСЕЛЕРОМЕТРОВ | 2020 |
|
RU2753150C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИИ | 2012 |
|
RU2504734C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В ПОЛЕТЕ | 2012 |
|
RU2486472C1 |
| СПОСОБ ОЦЕНКИ НАВИГАЦИОННОГО СОСТОЯНИЯ В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВОЗМОЖНОСТИ НАБЛЮДЕНИЯ | 2015 |
|
RU2701194C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ЭТАПЕ НАЧАЛЬНОЙ ВЫСТАВКИ | 2005 |
|
RU2300081C1 |
| Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам | 2021 |
|
RU2779274C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
Изобретение относится к области приборостроения. Способ комбинированной калибровки блока акселерометров заключается в том, что по полученным измерениям формируется единый массив невязок полученных и ожидаемых измерений вектора кажущегося ускорения и его абсолютного значения. Полученный массив линейно связывается с калибруемыми параметрами модели погрешностей акселерометров. Влияние невязок по отдельным измерениям и по абсолютной величине вектора ускорения на получаемую оценку балансируется настройкой алгоритма фильтра Калмана для стационарной системы, с помощью которого и производится оценка вектора коррекции параметров измерительной модели акселерометров, то есть их уточнение. Технический результат – повышение точности калибровки блока акселерометров.
Способ комбинированной калибровки блока акселерометров, заключающийся в том, что в различных угловых положениях блока производят измерения акселерометрами кажущегося ускорения, обусловленного силой тяжести, а также рассчитывают квадраты абсолютной величины измеренного ускорения, решением калибровочной системы уравнений с помощью фильтра Калмана оценивают вектор отклонения параметров модели акселерометров и выполняют калибровку акселерометров, отличающийся тем, что формируют массив невязок между измеренными и соответствующими ожидаемыми значениями проекций ускорения на оси чувствительности акселерометров и невязок между рассчитанными и ожидаемыми значениями квадрата абсолютной величины кажущегося ускорения, полученный массив линейно связывают с вектором отклонений параметров, формируя комбинированную калибровочную матрицу системы уравнений, включающей в себя уравнения линейной связи вектора отклонения параметров с указанными невязками, а фильтр Калмана применяют с диагональной матрицей ковариации измерительного шума, в которой величина ковариации шума квадрата полученной абсолютной величины ускорения равна единице, а величины ковариаций шума измерений ускорения равны 106.
| Аврутов В.В | |||
| "О скалярной калибровке блока гироскопов и акселерометров" | |||
| Теорія та практика навігаційних приладів і систем | |||
| Вісник НТУУ "КПІ" | |||
| Серія Приладобудування | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| - Вип | |||
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| Стр | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| СПОСОБ КАЛИБРОВКИ АКСЕЛЕРОМЕТРОВ | 2002 |
|
RU2249793C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ОСНОВНЫХ ХАРАКТЕРИСТИК БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ | 2016 |
|
RU2626288C1 |
| СПОСОБ ГРАДУИРОВКИ ПЪЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА НА НИЗКИХ ЧАСТОТАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2519833C2 |
| CN 108593965 A, 28.09.2018 | |||
| US 2014372063 A1, 18.12.2014. | |||

