Область техники
Настоящее изобретение относится к системе и способу осуществления ультразвукового измерения свойств стенки трубопровода.
Уровень техники
Из международной патентной публикации WO 2008/10306 известно использование ультразвуковых сигналов для обследования трубопроводов на предмет коррозионных повреждений. Для возбуждения ультразвуковой волны в стенке трубы используют передающее устройство, а для обнаружения прихода ультразвуковой волны после того, как она пройдет сквозь указанную стенку, используют приемное устройство.
Информация, полученная таким способом, может быть использована для формирования изображения повреждения в трубной стенке как функцию от положения по поверхности указанной стенки. Свойства указанной стенки определяют на основании времени прохождения, т.е. времени задержки между передачей и приходом сигнала. Стенка действует в качестве ультразвукового волновода для волн, распространяющихся между ее внешней и внутренней поверхностями. Можно представить распространение волн на примере луча, который отражается назад и вперед под углом к указанным поверхностям с результирующей скоростью распространения, параллельной поверхности и зависящей от указанного угла. Приемное устройство в конкретном местоположении на трубе принимает только лучи, которые отражаются назад и вперед под определенными отдельными углами. При больших длинах волн, сравнимых с толщиной стенки, избирательность указанного угла может быть рассмотрена как влияние конструктивной интерференции. При небольших длинах волн можно рассматривать, что лучи пропускают расположение приемного устройства за исключением отдельных углов.
Когда используются импульсы по существу ультразвуковых частот, результирующее распространение волн, параллельное поверхности, дает увеличение траекторий лучей, которые являются спиральными вдоль трубы с результирующими компонентами в осевом и периферическом направлениях (распространение непосредственно вдоль осевого направления и кругообразно по периферии будут рассмотрены как частные случаи спирали с нулевым компонентом в периферическом направлении и нулевым компонентом в осевом направлении соответственно). Обычно приемное устройство в конкретном местоположении на трубе будет принимать лучи, которые достигают его по различным спиральным лучевым траекториям, которые различаются на целое число оборотов по трубе. Когда трубная стенка имеет постоянную толщину, спиральный коэффициент (отношение между компонентами в периферическом и осевом направлениях) вдоль таких траекторий лучей остается постоянным. Время прохождения между временем передачи луча и временем его прихода зависит от траектории луча, по которой следует указанный луч, и результирующей скорости звука вдоль указанного луча, которая изменяется с изменением толщины трубной стенки.
Локальное повреждение трубы, которое приводит к локальному изменению толщины трубной стенки, влечет за собой изменение результирующей скорости звука и/или рассеивание между лучами с различными спиральными коэффициентами. Изменение скорости распространения дает увеличение модифицированного времени прохождения для комбинаций местоположений передающего устройства и приемного устройства, которые соединены траекториями лучей через местоположение указанного локального повреждения. Исходя из указанного времени прохождения лучей может быть определено осевое и периферическое местоположение указанного повреждения. Фактически изображение изменения толщины стенки как функция от местоположения может быть получено с использованием группы передающих устройств и приемных устройств. Это называется времяпролетной (TOF, time of flight) томографией.
Международная патентная публикация WO 2008/10306 раскрывает измерительную систему с ультразвуковыми преобразующими устройствами на трубе, которые используют для передачи ультразвуковых импульсов по стенке указанной трубы, ультразвуковые преобразующие устройства также используют для измерения времен прихода ультразвуковых импульсов, а также компьютер, который выполнен с обеспечением возможности вычисления местоположения повреждения на основании времени прохождения между передающим и принимающим преобразующими устройствами. Настоящий документ упоминает, что вследствие зависимости длины волны от скорости распространения ультразвука волновая дисперсия может сделать неточным определение указанного времени прихода. Это проблема решается посредством применения частотнозависимой фазовой коррекции к преобразованию Фурье для принимаемого ультразвукового сигнала. Результатом этого является острый импульс, на основании которого может быть определено время прохождения. Используя результирующее время прохождения для различных пар передающих и принимающих ультразвуковых преобразующих устройств, идентифицируют траектории лучей вдоль указанной трубы, при этом вследствие указанного повреждения изменилось время прохождения.
Для целей обнаружения коррозионного повреждения стенки трубы желательно построение изображения с высоким разрешением. На ранних стадиях погодная коррозия трубопровода приводит к образованию коррозийных язв, которые представляют собой угрозу перфорации стенки. Высокое разрешение является необходимым для формирования изображений, которые показывают такие коррозийные язвы. Для реализации такого высокого разрешения требуются узкие лучи вследствие ультразвуковых импульсов с частотным спектром при относительно высоких частотах, таких как 1 МГц. Однако было обнаружено, что при таких частотах трудно вычислить достоверное томографическое изображение. Такие изображения часто изображают ложные объекты. Было обнаружено, что эти ложные объекты являются следствием схождения томографического воспроизведения к локальному максимуму.
Международная патентная публикация WO 2009139627 также раскрывает моделирование поверхности объекта, такого как труба, используя ультразвуковые волны. Время задержки распространения, полученное из ультразвуковых измерений, сравнивают с прогнозами на основании модели указанной поверхности. Температурный параметр и параметр высоты поверхности указанной модели итерационно подгоняют. Введение температуры в качестве параметра делает возможным учет рефракции, где время задержки соответствует искривленной траектории луча, которая отклоняется от траектории луча при однородных температурах. Используют недисперсные волны, такие как волны, которые сосредоточены в одном узком частотном диапазоне. Задержки распространения моделируют посредством рассмотрения ультразвукового распространения как распространения по траектории луча. Не рассматривает никакого сложения волновых векторов или вычислений волновой интерференции. Используют двухуровневая модель, в которой указанные высота и температура подгоняют для ограниченного количества точек, а значения для других точек получены при помощи интерполяции.
Раскрытие изобретения
Среди прочего объектом настоящего изобретения является предоставление системы и способа осуществления ультразвукового измерения толщины стенки трубы, в которых стала возможной более достоверная сходимость.
Предоставлен способ по п.1. Здесь использованы первый и второй итерационные процессы подгонки модели, набор значений подогнанных параметров из первого процесса подгонки модели использован для инициализации указанных значений параметров для подгонки во втором процессе. Указанные процессы подгонки модели используют наборы параметров, которые определяют по меньшей мере скорость звука в стенке трубы как функцию от положения по поверхности стенки. Второй процесс использует обнаруженную передачу по меньшей мере на одной более высокой частоте звука, чем первый этап, а набор параметров, который определяет зависимость скорости звука от положения при более высоком пространственном разрешении.
Риск может быть уменьшен при помощи использования начального первого итерационного процесса подгонки модели при низкой частоте звука и низком пространственном разрешении, что второй процесс сходится к локальному оптимуму. Начальный первый итерационный процесс подгонки модели применяют к частоте звука, которая является настолько низкой, что обычно не используется для построения изображений из-за того, что на этой звуковой частоте прогнозирование передачи на основании времени прохождения вдоль траектории луча является недостаточно точным. Для обеспечения того, что начальный первый итерационный процесс подгонки модели обеспечивает применимые начальные параметры для второго процесса подгонки модели, начальный первый итерационный процесс подгонки модели использует значение волнового вектора, каждый из которых вычисляют из суммы значений волновых векторов для периферических положений на предыдущем кольце по указанной трубе, умноженных на коэффициенты распространения, используя коэффициенты распространения, которые зависят от скорости звука как функция от положения, как определено посредством первого набора параметров. Таким образом, прогнозы вычисляют с использованием волновых векторов, которые учитывают волновые фронты, распределенные по ширине более чем одного выборочного положения, а не отдельных траекторий лучей. Например, первая частота может составлять 50 кГц или ниже.
В варианте осуществления изобретения используют серию прогнозирующих моделей, при этом значения подогнанных параметров каждого процесса подгонки используют для инициализации указанных значений параметров следующего процесса подгонки, если он есть. В этом варианте осуществления изобретения последующий процесс для подгонки при последующей более высокой соответствующей звуковой частоте или звуковых частотах до указанной соответствующей звуковой частоты, соответствующие звуковые частоты и соответствующие пространственные разрешения увеличиваются для прогнозирующей модели, следующей в серии далее. Таким образом, может быть закрыт большой диапазон звуковых частот и соответствующий диапазон пространственных разрешений между начальным первым и последним процессами подгонки модели. Например, звуковая частота начального первого процесса подгонки модели может составлять 50 кГц или ниже, а звуковая частота заключительного процесса подгонки модели может составлять 500 кГц или выше, в этом случае могут быть использованы модели при пяти или более различных частотах и пространственных разрешениях.
В варианте осуществления изобретения модель или модели при частотах выше заранее определенной частоты могут быть основаны на суммировании времен прохождения вдоль траекторий, зависящих от ультразвуковой скорости, зависящей от положения и определенной при помощи параметров модели, без использования сумм воздействий от положений на предыдущем кольце.
В варианте осуществления изобретения трубопровод имеет искривленный участок между ультразвуковыми передающими устройствами и ультразвуковыми передающими устройствами. В дополнительном варианте осуществления изобретения модели, использующие суммы воздействий от положений на предыдущем кольце, могут быть использованы для всех частот для такого искривленного участка. В этом случае, для прямых участков трубы может быть использовано интегрирование времен прохождения вдоль траекторий, по меньшей мере для частот выше заранее определенной частоты.
В варианте осуществления изобретения передающие устройства и приемные устройства могут быть соединены с трубопроводом по первому и второму периферическим кольцам соответственно в плоскостях, поперечных осевому направлению трубопровода, в каждом из первого и второго колец во взаимно отделенных периферических положениях. Это делает возможным формирование изображения целой стенки трубы между указанными кольцами.
В варианте осуществления изобретения трубопровод поддерживается опорой, имеющей контакт с указанным трубопроводом, передающие устройства и приемные устройства, соединенные с указанным трубопроводом при взаимно отделенных периферических положениях вдоль линии в осевом направлении указанного трубопровода, причем передающие устройства и приемные устройства соединены с трубопроводом на взаимно противоположных сторонах указанного соединения. Это делает возможным определение повреждения конкретно в указанном контакте с опорой.
В варианте осуществления изобретения переданные ультразвуковые сигналы представляют собой широкополосные сигналы, содержащие составляющие как первой, так и второй частоты, первый и второй процессы подгонки применяются к выбранным частотным составляющим принятых ультразвуковых сигналов отклика. Таким образом, для формирования изображений может являться достаточным один тип импульса.
Также предоставлена система для осуществления указанного способа, также как и компьютерный программный продукт, такой как магнитный или оптический диск или полупроводниковое запоминающее устройство, содержащее программные инструкции для программируемого компьютера, которые при выполнении посредством указанного компьютера обеспечат осуществление указанным компьютером указанного способа по любому пункту из предыдущих пунктов формулы изобретения, относящихся к способу.
Краткое описание чертежей
Эти и другие объекты, а также преимущественные аспекты станут очевидными из описания примерных вариантов осуществления изобретения с использованием следующих чертежей.
Фиг.1 изображает измерительную систему.
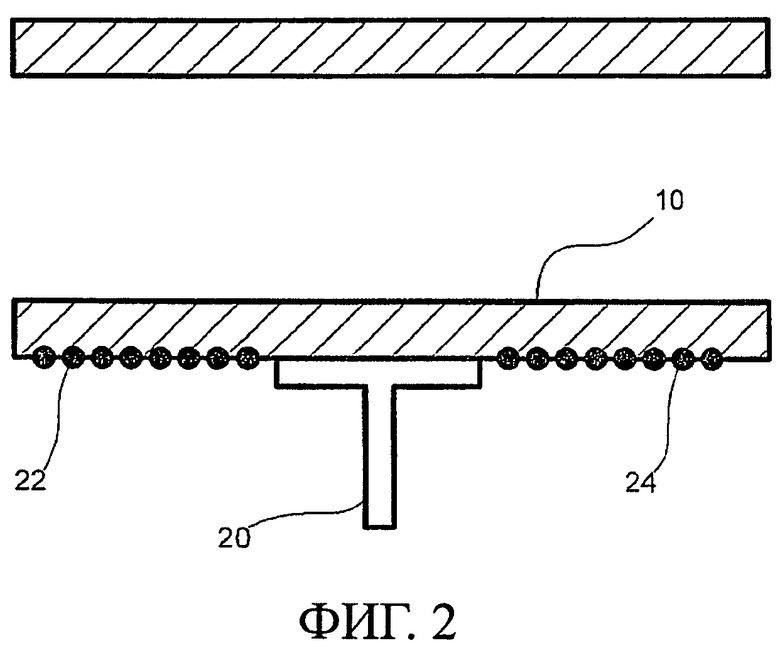
Фиг.2 изображает конфигурацию преобразующего устройства.
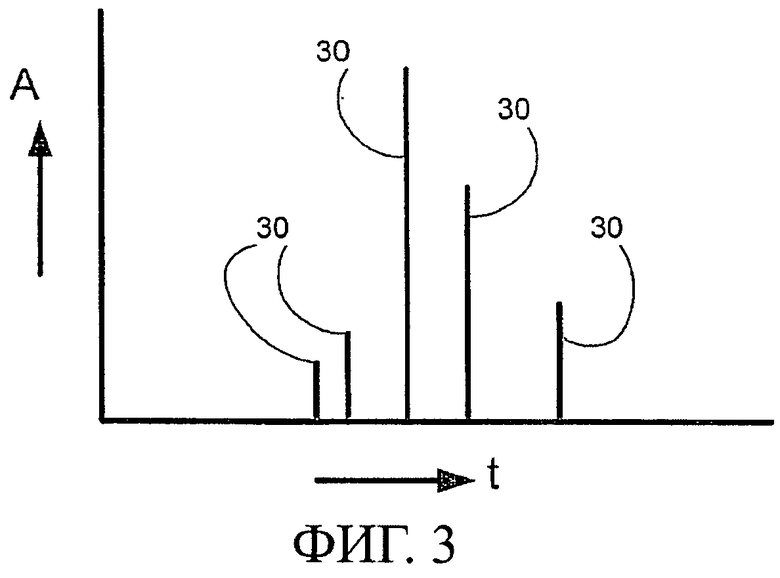
Фиг.3 иллюстрирует теоретический амплитудный отклик как функцию от времени.
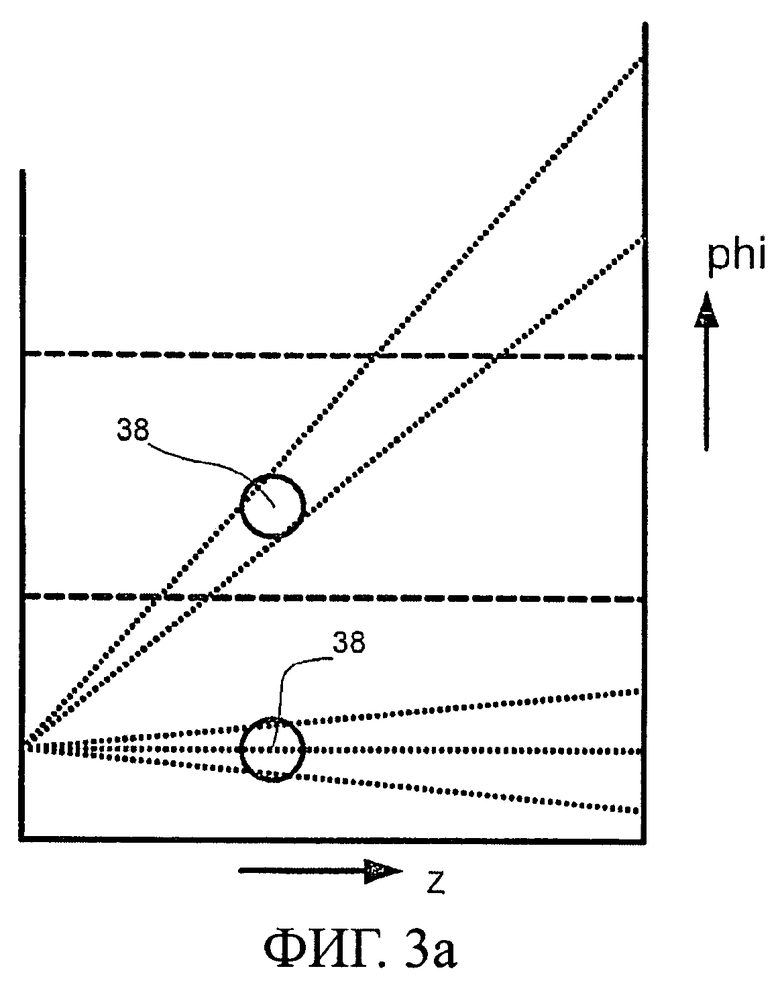
Фиг.3a иллюстрирует траектории лучей.
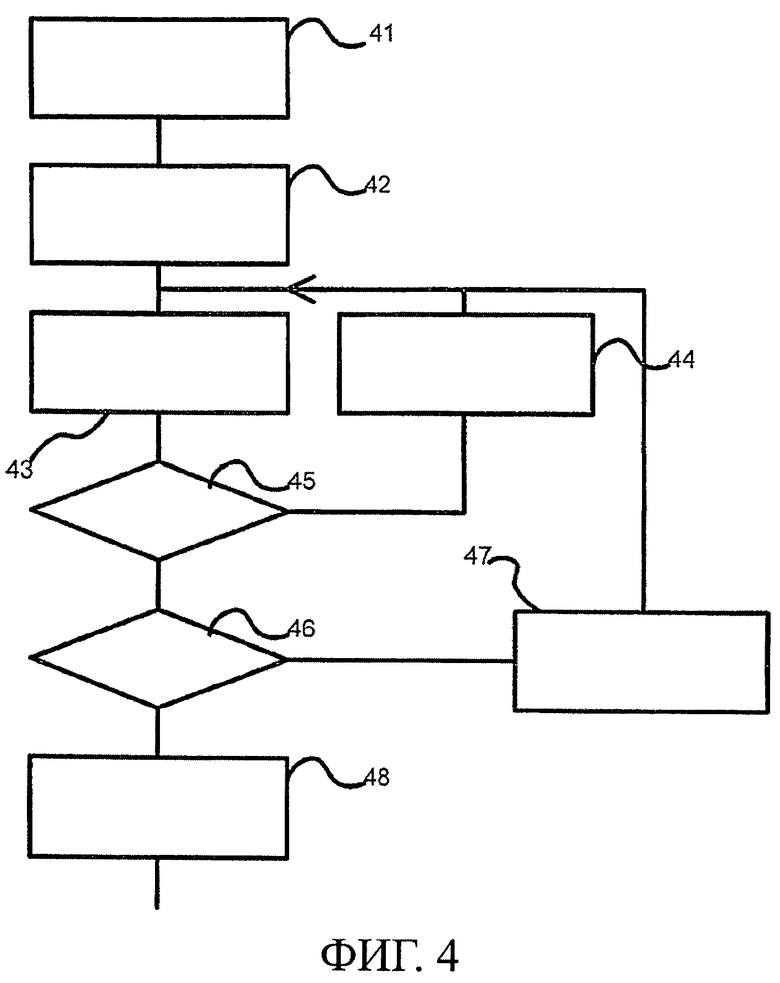
Фиг.4 изображает блок-схему процесса подгонки параметров
Фиг.5 изображает график, иллюстрирующий зависимость между скоростью звука и толщиной стенки.
Осуществление изобретения
Фиг.1 изображает систему измерения толщины стенки трубопровода, содержащую трубопровод 10 с кольцами ультразвуковых преобразующих устройств 12a-d, соединенных с трубопроводом 10, и схему 14 возбуждения и обнаружения, соединенную с ультразвуковыми преобразующими устройствами 12a-d. Схема 14 возбуждения и обнаружения содержит схему 140 обработки сигнала. Альтернативно, отдельная схема обработки сигнала, такая как компьютер, запрограммированный для осуществления обработки сигнала, может быть соединена со схемой 14 возбуждения и обнаружения. Каждое кольцо расположено по окружности вокруг трубопровода 10 в соответствующем осевом положении. Каждое кольцо содержит ультразвуковые преобразующие устройства 12a-d в соответствующих осевых положениях по периферии в таком осевом положении. Как изображено, трубопровод 10 имеет искривление 16 с кольцами ультразвуковых преобразующих устройств 12a-d на участках трубопровода на обеих сторонах указанного искривления. В другом варианте осуществления изобретения в искривлении 16 может быть обеспечено по меньшей мере одно кольцо ультразвуковых преобразующих устройств 12a-d.
Фиг.2 изображает альтернативную систему измерения толщины стенки трубопровода в поперечном сечении. Часть трубы 10 и трубная опора 20, соединенная с трубой 10. Первая серия ультразвуковых преобразующих устройств 22 обеспечена в последовательных различных осевых положениях на первой осевой стороне опоры 20. Вторая серия ультразвуковых преобразующих устройств 22 обеспечена в последовательных различных осевых положениях на второй осевой стороне опоры 20, противоположной первой стороне.
Ультразвуковые преобразующие устройства 12a-d, 22, 24 представляют собой устройства, способные передавать ультразвуковые колебания в стенку трубопровода 10 и/или обнаруживать такие колебания в указанной стенке, когда ими управляют для осуществления этих операций. Обнаружение может содержать создание электрического сигнала отклика, который изменяется по мере смещения в указанной стенке за счет ультразвуковых волн. Схема 14 возбуждения и обнаружения выполнена с возможностью управления ультразвуковыми преобразующими устройствами 12a-d, 22 для возбуждения ультразвуковых волн в выбранных положениях в стенке трубопровода 10 и приема обратных сигналов отклика за счет прихода результирующих ультразвуковых волн в другом положении в указанной стенке с использованием других преобразующих устройств 12a-d, 24.
В примере на фиг.1 схема 14 возбуждения и обнаружения может быть выполнена с возможностью управления ультразвуковыми преобразующими устройствами 12a-d в первом кольце последовательно для возбуждения различных ультразвуковых волн в трубопроводе 10 от каждого из этих ультразвуковых преобразующих устройств 12a-d соответственно и для приема результирующих обнаруженных ультразвуковых сигналов от преобразующих устройств 12a-d во втором кольце. Таким образом, может быть обнаружена ультразвуковая передаточная функция отклика между отдельными парами преобразующих устройств 12a-d.
Фиг.3 иллюстрирует теоретический амплитудный отклик как функцию от времени для ультразвуковой передачи сквозь прямой участок трубопровода 10 равномерной толщины. В этом примере указанный амплитудный отклик представляет амплитуду «А» ультразвуковых колебаний как функцию от времени «t» от момента времени передачи ультразвукового импульса с частотами в узком частотном диапазоне. Как можно видеть, указанный отклик содержит некоторое количество дискретных пиков 30 при различных дискретных временных положениях. В первом приближении, каждый пик соответствует времени прохождения звука, который прошел по траектории луча в стенке трубы 10 от местоположения передающего преобразующего устройства 12a-d до местоположения принимающего преобразующего устройства 12a-d с задержкой, соответствующей длине указанных траектории луча и скорости звука в траектории луча.
Фиг.3a иллюстрирует указанные траектории луча. Осевая координата «z» местоположений на трубе 10 указана горизонтально, а периферическая координата «phi» этих местоположений указана вертикально. Примеры траекторий луча в прямом участке трубы 10 показаны пунктирными линиями. Горизонтальные пунктирные линии соответствуют осевой траектории луча, а наклонные пунктирные линии соответствуют траекториям луча, которые являются спиральными вокруг оси трубы 10. С целью разъяснения периферическая координата развернута в вертикальном направлении: периферические координаты повторяются после каждого оборота вокруг трубы 10, на чертеже последующие координаты после повторения показаны так, как если бы они продолжались. Таким образом, одни и те же положения на указанной стенке неоднократно показаны в вертикально последовательных горизонтальных полосах, разделенных при помощи пунктирных линий. Спиральная траектория луча, таким образом, может быть показана как непрерывная прямая линия, несмотря на то, что ее периферическая координата циклически повторяется с циклом в 360 градусов.
Для примера можно предположить, что левая вертикаль указанного чертежа соответствует осевой координате кольца передающих преобразующих устройств 12a-d, а левая вертикаль указанного чертежа соответствует осевой координате кольца принимающих преобразующих устройств 12a-d. Из-за развертки положение одного и того же ультразвукового преобразующего устройства 12a-d неоднократно показано в последовательных горизонтальных полосах. Каждый пик на фиг.3 соответствует времени прихода ультразвуковой волны по траектории луча, которая может быть показана как прямая линия между положениями передающего и принимающего ультразвуковых преобразующих устройств 12а, b. Из-за повторяющегося характера вертикальной координаты на фиг.3a одни и те же передающий и принимающий ультразвуковые преобразующие устройства 12а, b могут быть соединены несколькими траекториями луча, которые различаются количеством спиральных оборотов указанной траектории луча вокруг периферии трубы 10 до достижения принимающего преобразующего устройства.
Времена прохождения, показанные на фиг.3, зависят от длины траектории луча и от скорости распространения ультразвука сквозь стенку трубопровода. Скорость распространения ультразвука зависит от толщины стенки, которая задает свойства волноводного режима для волновода, образованного между внутренней и внешней поверхностями указанной стенки трубы. Могут возникать различные волноводные режимы указанного ультразвукового волновода с различной скоростью распространения. В результате одна и та же траектория луча может приводить к нескольким различным временам прохождения.
Когда толщина стенки локально изменяется вследствие повреждения трубы 10, это приводит к локальному изменению скорости распространения, которое сдвигает положения пиков 30, полученных этими парами преобразующих устройств 12a-d, которые соединены траекториями луча через область с локально различной толщиной стенки. Если скорость звука в области 38 трубной стенки отличается от скорости в остальной области указанной трубной стенки, распространение звука по траекториям луча, которые проходят через область 38, будет обнаружимо отличаться. Фиг.3a изображает траектории луча от одного передающего ультразвукового преобразующего устройства к принимающим ультразвуковым преобразующим устройствам, указанные траектории изменены вследствие распространения через область 38. Для принимающих ультразвуковых преобразующих устройств в конце таких траекторий луча время прихода ультразвуковых импульсов от указанного передающего ультразвукового преобразующего устройства будет изменено.
В принципе, указанный сдвиг делает возможным определение периферического и осевого положения области 38 с различной скоростью звука на основании измеренных времен прохождения между ультразвуковыми преобразующими устройствами. Указанное положение должно находиться в сечении между траекториями луча между парами ультразвуковых преобразующих устройств 12a-d, которые показывают сдвинутый пик. Размер изменения толщины стенки может быть определен на основании величины сдвига указанных пиков.
Вышеизложенное относится к прямым участкам трубы 10. Указанное действие в искривлении 10 является более сложным. В принципе, возможно начертить траектории луча для местоположений в искривлении 16 на диаграмме, подобной изображенной на фиг.3a. Эти траектории луча будут скорее кривыми, чем прямыми, в зависимости от геометрии искривления 16. Можно попытаться модифицировать процедуру измерения местоположений областей с измененной скоростью звука на прямых участках при помощи применения измеренных времен прохождения по таким кривым траекториям луча вместо прямых траекторий луча.
Для формирования изображения скорости звука как функции от положений на трубе может быть использована томография времени прохождения. Указанное изображение описывает толщину стенки или по меньшей мере одно из свойств распространения звука, которая или которое зависят от толщины стенки, как функцию от положения по поверхности указанной стенки. С учетом изображения могут быть спрогнозированы соответствующие времена прохождения для соответствующих пар приемопередающих устройств. В варианте осуществления томографии времени прохождения процессор сравнивает спрогнозированные времена прохождения с измеренными временами прохождения. Результатом указанного сравнения может являться вычисление показателя разности, например, суммы квадратов разности между измеренными и спрогнозированными временами прохождения для различных пар преобразующих устройств, плюс опциональные упорядочивающие выражения, которые представляют априори вероятность выбираемых томографических изображений. Указанный показатель разности используют для выбора обновлений для того изображения, которое уменьшает указанный показатель разности.
Для того чтобы получить изображения с достаточным разрешением для обнаружения коррозионного повреждения трубы, требуются изображения высокого разрешения. Коррозия на ранней стадии приводит к незначительным коррозионным язвам, которые должны быть обнаружены. Импульсы с высокими ультразвуковыми частотами, например 1 МГц, и итерационная подгонка изображения ко временам прохождения импульсов с такой частотной составляющей являются необходимыми для реализации требуемого разрешения. Однако было обнаружено, что когда используют такие высокие частоты, по меньшей мере в некоторых случаях применение итерационного процесса для выведения изображений на основании измеренных времен прохождения не приводит к достаточно достоверным изображениям. Было обнаружено, что это происходило из-за того, что указанные итерации сходились к локальному минимуму, который не представлял изображения, которые являются пригодными для обнаружения повреждений трубы. Кривые траектории луча в искривлении могут также приводить к проблемам. Было обнаружено, что искривление также приводит к эффектам ультразвуковой линзы, а эти эффекты оказывают влияние на надежность обнаружения повреждения.
Было обнаружено, что эти проблемы могут быть преодолены при помощи начала указанных итераций с начальной оценки, которая получена с использованием таких низких ультразвуковых частот, при которых приближенное представление траектории луча не дает точные изображения даже при низком разрешении. Например, может быть использован 50 кГц ультразвуковой частотный спектр.
Фиг.4 изображает блок-схему процесса подгонки параметров. На первом этапе 41 схема 140 обработки сигнала схемы 14 возбуждения и обнаружения (или схема 140 обработки сигнала, соединенная со схемой 14 возбуждения и обнаружения) получает ультразвуковые передаточные функции отклика между парами ультразвуковых преобразующих устройств 12b, с в первом и втором кольце соответственно, при помощи последовательного управления различными ультразвуковыми преобразующими устройствами 12b в первом кольце для возбуждения ультразвуковых волн в трубе 10 и приема измеренных ультразвуковых сигналов после указанного возбуждения от ультразвуковых преобразующих устройств 12с во втором кольце во временных окнах в заранее определенное время относительного временного положения по отношению к указанному возбуждению. Указанные измеренные ультразвуковые сигналы представляют ультразвуковое смещение в стенке трубы 10 как функцию от времени, то есть не только временное распределение, но и величину указанного смещения.
В варианте осуществления изобретения передают широкополосные ультразвуковые импульсы с частотным спектром, покрывающим диапазон, например, от 50 кГц до 1 МГц. Предпочтительно, указанный частотный диапазон содержит частоты в диапазоне от частот, при которых ультразвуковая длина волны в стенке трубы 10 больше, чем толщина указанной стенки, до частот, при которых указанная длина волны меньше, чем толщина указанной стенки. Результатом является набор функций отклика для амплитуды ультразвуковых колебаний как функция от времени для каждой соответствующей пары ультразвуковых преобразующих устройств в первом и втором кольцах. Функции отклика могут быть преобразованы при помощи преобразования Фурье для получения составляющих при различных частотах. Например, может быть использовано быстрое преобразование Фурье (FFT, fast Fourier transformation). В другом варианте осуществления изобретения может быть передана серия более узкополосных ультразвуковых импульсов с частотным спектром с соответствующими частотами в этом диапазоне. В этом варианте осуществления изобретения могут быть измерены фаза, амплитуда и, опционально, время прохождения отклика для каждого из этих импульсов для принимающих преобразующих устройств 12c.
На втором этапе 42 схема 140 обработки сигнала устанавливает начальное установочное значение W ширины полосы частот и начальные значения параметров толщины стенки. В варианте осуществления изобретения начальная полоса частот выбирает одну измерительную частоту (составляющую), равную, например, 50 кГц. В варианте осуществления изобретения параметры толщины стенки могут представлять изображение толщины с «пикселями», которые соответствуют двумерному набору выборочных положений вдоль трубы 10, распределенных по диапазону положений от первого кольца до второго кольца по первому измерению и вокруг периферии трубы 10 по второму измерению. В качестве начальных значений могут быть использованы, например, значения, определяющие однородную толщину, или толщина, измеренная ранее. В варианте осуществления изобретения установочное значение W ширины полосы частот используют для указания на число подвыборки, которая задает поднабор указанного набора выборочных положений в подвыборочных положениях. В этом варианте осуществления изобретения значения указанных параметров для оставшихся выборочных точек могут быть интерполированы между значениями для указанных подвыборочных положений.
С третьего по пятый этапы 43-45 соответствуют вычислительной стадии, в которой выполняют процесс подгонки при выбранном установочном значении W ширины полосы частот. Процесс подгонки при выбранном установочном значении W ширины полосы частот включает итерации обновленных этапов.
На третьем этапе 43 схема 140 обработки сигнала вычисляет прогнозные функции отклика между парами преобразующих устройств 12b, с в первом и втором кольцах для трубы с толщиной стенки, зависящей от положения, в соответствии с параметрами толщины стенки. Для этого вычисления толщина стенки между выборочными положениями может быть определена при помощи интерполяции между указанными выборочными положениями. Кроме этого, на третьем этапе 43 схема 140 обработки сигнала вычисляет разность между прогнозными функциями отклика и измеренными функциями отклика. В варианте осуществления изобретения указанное вычисление прогнозных функций отклика вычисляют в зависимости от установочного значения W ширины полосы частот. В одном варианте осуществления изобретения прогнозные функции отклика вычисляют для одной частоты в самой высокой точке полосы W частот, а указанная разность с измеренными функциями отклика вычисляют при этой частоте. В другом варианте осуществления изобретения прогнозные функции отклика вычисляют для комбинации частот до указанной полосы частот, а указанную разность вычисляют с комбинацией функций отклика до указанной полосы частот.
В варианте осуществления изобретения прогнозные функции отклика между парами преобразующих устройств для частот, более высоких, чем заранее определенная минимальная частота, могут быть вычислены с использованием аппроксимации траектории луча, которая выбирает траектории между парами преобразующих устройств и интегрирует результат толщины по указанным траекториям, как задано в указанном изображении толщины. Вариант осуществления указанного вычисления прогноза для более низких частот будет описан более подробно ниже.
В этом варианте осуществления изобретения, который используют по меньшей мере при самой низкой частоте (например, 50 кГц), указанное вычисление прогноза выполняют скорее с использованием оператора распространения, зависящего от толщины, чем с использованием только времен прохождения по траекториям луча между парами преобразующих устройств.
В этом варианте вычисления заданы последовательные виртуальные кольца выборочных положений вдоль трубы 10. Каждое виртуальное кольцо содержит выборочные позиции вдоль периферии трубы 10. Последовательные виртуальные кольца расположены на последовательных осевых выборочных координатах. В искривлении 16 направления указанных виртуальных колец радиально расходятся от воображаемого центра кривой искривления 16. Таким образом, указанные выборочные положения в последовательных виртуальных кольцах на внешней поверхности указанного искривления лежат в большем удалении, чем на внутренней поверхности указанного искривления.
В этом варианте осуществления изобретения волновые векторы (амплитуда и фаза) при указанной частоте вычисления (например, 50 кГц) вычисляют для положения заданного передающего преобразующего устройства 12b в первом кольце, а набор волновых векторов вычисляют для выборочных положений в первом виртуальном кольце между первым и вторым кольцами ультразвуковых преобразующих устройств 12b, с. В дальнейшем последующие волновые векторы для частоты вычисления в других кольцах определяют для выборочных положений на виртуальных кольцах выборочных положений, которые последовательно расположены ближе ко второму кольцу ультразвуковых преобразующих устройств 12с. Для каждого соответствующего выборочного положения в следующем (например, виртуальном) кольце последующий волновой вектор определяют исходя из суммы воздействий различных начальных выборочных положений на предыдущем (например, виртуальном) кольце, умноженных на коэффициенты, которые выбраны в зависимости от скорости звука c(r) в следующем кольце, предыдущем кольце или между следующим и предыдущим кольцами, в периферическом положении соответствующего выборочного положения в следующем кольце, в соответствии с параметрами модели (например, в соответствии с изображением толщины). Данный подход применяют, когда в трубной стенке используют только один режим распространения. Когда распространение в указанной стенке поддерживает несколько режимов с различными скоростями звука, могут быть вычислены соответствующие волновые векторы для каждого из этих режимов тем же самым способом, что и для одного режима. В этом случае относительные амплитуды различных волновых векторов в начальном кольце могут быть определены исходя из заранее определенных относительных входных соединительных факторов для различных режимов. Общий выход на приемное устройство может быть вычислен с использованием заранее определенных относительных выходных соединительных факторов для различных режимов. Указанные относительные входные и выходные соединительные факторы для различных режимов могут быть определены с использованием калибровочных измерений для стандартного трубного участка.
Используют коэффициенты, которые зависят от периферических положений соответствующих выборочных положений в следующем кольце, для которых определяют волновой вектор, и различных исходных выборочных точек на предыдущем кольце. По прямому участку трубы 10 указанные коэффициенты зависят только от разности между периферическими положениями указанных выборочных точек, для которых определяют волновой вектор, и указанных исходных выборочных точек. Но в искривлении 16 указанные коэффициенты также зависят от индивидуальных периферических положений этих точек (не только от их относительных положений), например, из-за того, что расстояние между выборочными точками на последовательных кольцах является меньшим на внутренней поверхности указанного искривления, чем на его внешней поверхности.
Зависимость коэффициентов F от периферического положения на предыдущем кольце может быть изображена при помощи разложения в ряд Фурье этой зависимости. Преобразование Фурье указанной зависимости от периферического положения определяет коэффициенты ряда Фурье при периферических пространственных частотах Fc=2*pi*R//L, где R является радиусом указанной трубы, а L является периферической длиной волны. В принципе, для заданной скорости звука «с», когда используют один ультразвуковой режим, это преобразование Фурье для коэффициентов F может быть принято имеющим следующее значение:
F(L, с)=exp(-i*2*pi*k*h) где k=sqrt((f/c)2-1/L2).
Здесь i представляет собой квадратный корень из -1:i2=-1, h представляет собой расстояние между последовательными кольцами выборочных точек (при периферическом положении выборочной точки в следующем кольце в случае искривления), f представляет собой частоту звука, для которой вычислен волновой вектор.
Коэффициенты F(Rs, c) как функция периферического положения Rs по предыдущему кольцу могут быть определены при помощи вычисления обратного преобразования Фурье. Однако использование именно этих коэффициентов, полученных в результате обратного преобразования Фурье, имеет недостаток, состоящий в том, что для каждой выборочной точки, для которой определяют волновой вектор, должны быть использованы все исходные точки в предыдущем кольце. В дополнительном варианте осуществления изобретения количество вычислений уменьшено при помощи приравнивания коэффициентов F(Rs, с) к нулю для почти всех исходных выборочных точек в периферических положениях Rs, которые находятся на меньшем расстоянии от периферического положения выборочной точки, для которой определяют волновой вектор, чем заранее определенное расстояние. Другими словами, сумма по исходным положениям в различных периферических положениях в предыдущем кольце увеличивается только до заранее определенного ограниченного диапазона периферических положений, содержащих периферическое положение точки, для которой вычисляют волновой вектор, в следующем кольце и по меньшей мере одно дополнительное положение в предыдущем кольце на любой стороне. Например, для исходных выборочных точек по меньшей мере в трех периферических положениях используют ненулевые коэффициенты, а предпочтительно для большего их количества.
В этом случае оставшиеся ненулевые коэффициенты F(Rs, c) могут быть подогнаны для того, чтобы улучшить численную устойчивость. Методики осуществления этого в чистом виде известны. Численная устойчивость может быть оценена из обновленного преобразования Фурье для коэффициентов после приравнивания их части к нулю, и определение того, превышают ли единицу абсолютные значения коэффициентов, полученных в результате преобразования Фурье. Превышение абсолютным значением единицы предпочтительно опускается или по меньшей мере уменьшается. Может быть использован способ оптимизации, в котором указанные ненулевые коэффициенты выбирают так, что они минимизируют целевую функцию, которая увеличивается с увеличением отклонения от указанных коэффициентов F, давая более высокий вес в целевой функции тем отклонениям, которые поднимают указанное абсолютное значение выше единицы, кроме тех отклонений, которые этого не делают. Таблицы указанных коэффициентов могут быть предварительно сохранены и использованы для указанных вычислений.
Прогноз указанных функций отклика оказывается доступным, как только указанное вычисление волновых векторов будет повторено для последующих виртуальных колец то тех пор, пока не будет достигнуто положение второго кольца ультразвуковых преобразующих устройств 12b.
Обобщая сказанное, на третьем этапе 43 схема 140 обработки сигнала вычисляет прогнозные функции оклика между парами преобразующих устройств 12b, c в первом и втором кольцах для трубы толщиной стенки, зависящей от положения, в соответствии с параметрами толщины стенки. По меньшей мере для самой низкой частоты (например, 50 кГц) вычисление указанных прогнозных функций отклика содержит вычисление волновых векторов (амплитуда и фаза) для наборов выборочных точек в последовательной серии периферических положений вдоль последовательных виртуальных колец вдоль указанной трубы. Первое кольцо содержит местоположение передающего преобразующего устройства, а последнее кольцо содержит положение принимающего преобразующего устройства. Значения волнового вектора в первом кольце принимают за ноль для всех периферических положений, за исключением положений указанного передающего преобразующего устройства.
В следующих виртуальных кольцах волновые векторы вычисляют для положений заданного передающего преобразующего устройства 12b в первом кольце, а набор волновых векторов вычисляют для выборочных положений на первом кольце 12b между первым и вторым кольцами ультразвуковых преобразующих устройств 12b, с. В дальнейшем последующие волновые вектора определяют для выборочных положений на виртуальных кольцах выборочных положений, которые расположены последовательно ближе ко второму кольцу ультразвуковых преобразующих устройств 12с. Для каждого относительного выборочного положения в следующем кольце определяют волновой вектор исходя их суммы воздействий различных исходных выборочных точек на предыдущем кольце, умноженных на коэффициенты, которые выбраны в зависимости от скорости звука c(r) в следующем кольце, в предыдущем кольце или между следующим и предыдущем кольцами, в периферическом положении соответствующего выборочного положения в следующем кольце, в соответствии с параметрами модели (например, в соответствии с изображением толщины). Это повторяют до тех пор, пока не будет определен волновой вектор в положениях принимающих преобразующих устройств во втором кольце 12с. Это выполняют для всех передающих преобразующих устройств и, если необходимо, для всех вносящих вклад режимов распространения. Для частот выше пороговой частоты указанные прогнозы могут вычислять при помощи выбора траекторий лучей между передающим и принимающим преобразующими устройствами и добавления времени прохождения, определенного из изображения толщины, вдоль указанной траектории луча. Кроме того, на третьем этапе 43 схема 140 обработки сигнала вычисляют разность между прогнозными функциями отклика и измеренными функциями отклика. Вместо прямого определения разности могут быть использованы другие типы сравнения. Например, могут вычитать логарифмы функций отклика, или отношение прогнозных функций отклика и измеренных функций отклика сравнивают с контрольным значением. Если абсолютные значения входных и выходных соединительных факторов, которые связывают сигналы передающего и принимающего преобразующих устройств с ультразвуковым смещением в трубной стенке, неизвестны, то указанная разность может быть вычислена после применения поправочного коэффициента, который минимизирует общую разность. В общем, на результаты таких сравнений будут ссылаться как на разности.
На четвертом этапе 44 схема 140 обработки сигнала определяет, соответствует ли указанная разность критерию сходимости. Критерий сходимости может зависеть от установочного значения W ширины полосы частот. В первом варианте осуществления изобретения определяют только разность между измеренными и прогнозными волновыми векторами для самой высокой частотной составляющей в указанной полосе частот или ниже ее. В другом варианте осуществления изобретения определяют только разность между измеренными и прогнозными волновыми векторами комбинации частотных составляющих (например, всех) в указанной полосе частот или ниже ее, при помощи суммирования различных измерений для различных частот. Самые высокие частотные составляющие указанных разностей за пределами установочного значения W ширины полосы частот опускают при вычислении указанного критерия сходимости, по меньшей мере относительно частотных составляющих указанной разности в пределах установочного значения W ширины полосы частот.
Если указанная разность не соответствует критерию сходимости, то схема 140 обработки сигнала выполняет пятый этап 45, выбирая подогнанные значения параметров на основании указанной разности, и повторяет процесс, начиная с третьего этапа 43. Выбор подогнанных значений может управляться в зависимости от установочного значения W ширины полосы частот. В указанном варианте осуществления изобретения с выборочными точками и подвыборкой непосредственно обновляют только значения для подвыборочного набора выборочных точек, а значения параметров для остальных выборочных точек могут быть интерполированы.
Если указанная разность соответствует критерию сходимости, схема 140 обработки сигнала выполняет шестой этап 46, на котором она определяет, находится ли установочное значение W ширины полосы частот ниже максимального значения Wmax. Если это так, схема 140 обработки сигнала выполняет седьмой этап 47, на котором она увеличивает установочное значение W ширины полосы частот и выполняет новую стадию подгонки с новым установочным значением W ширины полосы частот, повторяя процесс, начиная с третьего этапа 43. В этом случае на третьем этапе 43 значения параметров (например, изображение толщины), вычисленные со старым установочным значением W ширины полосы частот, служат в качестве начальных значений параметров. В варианте осуществления изобретения по меньшей мере при самом низком установочном значении W ширины полосы частот значения начальных параметров (например, изображение толщины) вычисляют с использованием функций распространения вместо траекторий луча.
В указанном варианте осуществления изобретения с выборочными точками и подвыборкой увеличение установочного значения W ширины полосы частот увеличивает количество выборочных точек подвыборки, а начальные значения параметров для новых выборочных точек подвыборки определяют при помощи интерполяции.
Если схема 140 обработки сигнала определяет на шестом этапе 46, что установочное значение W ширины полосы частот достигло максимального значения Wmax или превысило его, то схема 140 обработки сигнала выполняет восьмой этап 48, выводя информацию, отклоняющуюся от указанных значений параметров. Например, может быть отображено изображение, указывающее вычисленную толщину стенки как функцию от положения вдоль трубы 10, как функции от положения на указанном изображении.
Измеренные сигналы представляют измеренное смещение (амплитуда) в стенке трубы 10 за счет ультразвуковых волн на нескольких частотах в дополнение к временам прохождения по меньшей мере для искривленного участка трубы 10. То есть используют не только времена прохождения, но также и амплитуду. Сигналы отклика как функция от времени будут синусоидами в случае непрерывного волнового возбуждения. В случае импульсного возбуждения это будет сумма (интеграл) синусоид для различных длин волн в стенке трубы 10. Эти ультразвуковые амплитуды смещения также могут быть использованы для применения к прямому участку, но в этом случае и при более высоких частотах вместо этого может быть достаточно использовать только времена прохождения, связанные с импульсами отклика, которые являются результатом возбужденных импульсов.
В варианте осуществления изобретения на фиг.1 схема 140 обработки сигнала обрабатывает ультразвуковую передаточную функцию отклика между отдельными парами преобразующих устройств в последовательных кольцах ультразвуковых преобразующих устройств 12a-d для формирования изображения толщины трубной стенки в зависимости от положения на трубе 10. Используют ультразвуковую передаточную функцию отклика по ширине полосы ультразвуковых частот, например, от 50 кГц до 1 МГц. Предпочтительно частотный диапазон содержит частоты в диапазоне от частот, при которых длина ультразвуковой волны в стенке трубы 10 больше толщины указанной стенки, до частот, где длина волны является меньшей, чем указанная толщина. Схема 140 обработки сигнала выполнена с возможностью использования процесса подгонки параметров для значений набора параметров, которые описывают скорость распространения звука как функцию от положения на трубе 10, например, в терминах толщины стенки трубопровода.
В итерационном процессе подгонки указанный набор параметров используют для вычисления прогнозов ультразвуковых передаточных функций отклика, включая амплитуду ультразвуковых колебаний. Схема 140 обработки сигнала сравнивает эти прогнозы с обнаруженными ультразвуковыми передаточными функциями отклика, включая амплитуду ультразвуковых колебаний. Результат указанного сравнения используют для подгонки значений параметров. Прогнозирование, сравнение и подгонку повторяют до тех пор, пока не будет удовлетворен критерий сходимости. Конечные значения указанных параметров используют для вывода в качестве характеристики оценочной толщины стенки трубопровода.
По меньшей мере при одной из самых низких частот для вычисления указанных прогнозов используют функции распространения, что делает возможным обеспечение сходимости. Начальное изображение с низким разрешением может быть сделано при помощи использования очень низких частот. При низких частотах достоверность указанного изображения увеличивается при помощи сравнения с прогнозами, вычисленными с использованием функций распространения. В особенности это так, когда есть искривленные участки трубы. В варианте осуществления изобретения прогнозы для всех частот вычисляют с использованием функций распространения для искривленных трубных участков. То есть для первого и второго колец ультразвуковых преобразующих устройств 12b, с, которые отделены искривленной частью 16, процесс подгонки подбирает ультразвуковое смещение как функцию от времени или частоты, а не только от сдвига времени прихода импульсов. Таким образом, указанное сравнение, которое используют для подгонки значений параметров, содержит сравнение информации о передаточной амплитуде, которая является излишней для простого сравнения информации о времени прохождения. В результате можно выполнять более точное обнаружение.
Для вычисления разности между спрогнозированными функциями отклика и измеренной функцией отклика может быть вычислено временное преобразование Фурье измеренных функций отклика для каждой пары ультразвуковых преобразующих устройств 12b, с. Это приводит к набору коэффициентов Фурье для различных частот, которые могут быть сравнены с вычисленными волновыми векторами для осевого и периферического положений ультразвуковых преобразующих устройств 12b, с.
Измерение разности может быть вычислено как сумма квадратов абсолютных значений разностей между вычисленными волновыми векторами и указанными коэффициентами Фурье, суммированными по частотам до указанного установочного значения ширины полосы частот. В варианте осуществления изобретения разностям могут быть присвоены веса в зависимости от частоты. Эквивалентно может быть использована сумма квадратов разностей между спрогнозированными амплитудами ультразвуковых колебаний и измеренными амплитудами ультразвуковых колебаний в сочетании с временной низкочастотной фильтрацией амплитуд, зависящих от времени, в соответствии с установочным значением W ширины полосы частот до и/или после взятия указанной разности. Критерием сходимости может являться определение, превышает ли это измерение разности заранее определенное пороговое значение.
Подгонка параметров пятого этапа 45 включает применение зависимых от положения обновлений к значениям параметров толщины. Выбирают комбинации обновленных размеров для различных параметров или обновления отдельных параметров, которые оказывают влияние на разности между прогнозами и обнаружениями в пределах указанного установочного значения ширины полосы частот. Такие комбинации обновленных размеров или обновлений могут быть идентифицированы с использованием производных указанных разностей по отношению к доступным параметрам модели для указанного установочного значения ширины полосы частот, когда эти производные могут быть получены из указанной модели. Процессы подгонки из известного уровня техники обеспечивают такой выбор. Обычно обновления толщин стенки выбирают при спиральных траекториях луча между парами ультразвуковых преобразующих устройств 12b, c, при которых присутствуют разности между прогнозами и обнаружениями, или около таких траекторий. Указанные обновления могут быть выбраны в соответствии с любым подходящим способом оптимизации, например, в соответствии с алгоритмом Левенберга-Марквардта.
Подгонка параметров пятого этапа 45 может быть сконцентрирована на подгонке параметров или комбинаций параметров, которые имеют самое большое влияние на прогноз в указанном установочном значении ширины полосы частот. Для выбора таких параметров могут быть вычислены производные измерений разности по отношению к соответствующим значениям параметров. Например, значения толщины могут быть обновлены только для подвыборочного поднабора выборочных положений, а между этими положениями они могут быть интерполированы.
Когда установочное значение W ширины полосы частот увеличивают, значения параметров, полученные с меньшим установочным значением W ширины полосы частот, используют в качестве начальных значений для вычисления значений параметра для увеличенного установочного значения ширины полосы частот. Таким образом, пространственные данные все более высокого пространственного разрешения делают допустимым использование соответственных сравнений по все более широкой полосе частот отклика. Использование начальных значений, полученных с меньшим установочным значением ширины полосы частот, уменьшает риск того, что процесс сходится к набору параметров, которые являются только локально оптимальными.
Интерполяция значений параметров для различных положений на трубе 10 может быть выполнена любым подходящим способом. Например, может быть использована интерполяция с линейной функцией между положениями, для которых доступны значения параметров. Могут быть использованы другие интерполирующие функции, такие как полиномиальные интерполирующие функции, использующие коэффициенты полиномов, выводимые из значений параметров для трех или более положений на указанной стенке. Другие интерполирующие функции содержат суммы синусоидальных и косинусоидальных функций периферических углов с цикличностью по целым числам. Это соответствует ряду Фурье. В варианте осуществления изобретения коэффициенты полиномиального ряда, ряда Фурье или другого функционального разложения в ряд используют в качестве параметров вместо значений толщины в дискретных местоположениях. В этом случае количество коэффициентов ряда Фурье, которое используют в процессе подгонки, может быть изменено в зависимости от установочного значения ширины полосы частот.
В варианте осуществления изобретения на фиг.2 ряд преобразующих устройств расположен в последовательных виртуальных кольцах вокруг трубы в периферических положениях, которые лежат вдоль линии в осевом направлении указанной трубы, с группами преобразующих устройств на взаимно противоположных сторонах опоры, которая присоединена к указанной трубе. Для измерения трубных повреждений на указанной опоре используют передачу и прием преобразующих устройств на взаимно противоположных сторонах указанной опоры.
В этом варианте осуществления изобретения может быть использована модель, которая обеспечивает функцию толщины, задающую толщину трубной стенки как функцию от положения по линии преобразующих устройств в осевом направлении, и опционально дополнительные функции толщины, задающие толщину по параллельным линиям, смежным этой линии. В ином случае могут быть использованы подобные измерительные процессы, содержащие итерации при последовательно более высоких полосах частот, каждая с использованием функции толщины (и опционально дополнительных функций толщины) из итерации в предыдущей более низкой полосе частот в качестве начальной функции толщины (и опционально дополнительных функций толщины). Поочередно каждая итерация содержит подгонку указанной функции толщины (и опционально дополнительных функций толщины) к тем прогнозам, которые основаны на указанной функции толщины (и опционально дополнительных функциях толщины) и аппроксимируют измеренные волновые векторы на ближайшей частоте в пределах полосы частот или ниже ее, или комбинации частот вплоть до указанной полосы частот. По меньшей мере в итерации для самой низкой частоты вычисляют прогноз с использованием функций распространения того типа, который описан выше.
Хотя был описан вариант осуществления изобретения, который использует модель, выраженную в терминах толщины трубной стенки, как функцию от положения, из которой может быть выведена скорость звука для различных частот, следует принять во внимание, что альтернативно модель может прямо определять указанную скорость звука. В этом случае инициализация последовательных процессов подгонки может содержать определение скорости звука в различных положениях для следующей частоты из предыдущей скорости звука, например, при помощи временного перевода ее в толщину. Приближенные формулы и таблицы, относящиеся к толщине и скорости звука как функции от частоты, заданная объемная скорость звука известны сами по себе. Фиг.5 изображает пример скорости звука (фазовая скорость) режима стенки как функцию от толщины стенки d составляет толщину стенки, деленную на два, a kt=2*р1*частота/объемная скорость поперечной волны).
Схема обработки сигнала может быть реализована в виде программируемой компьютерной схемы в сочетании с программной памятью, которая содержит инструкции, обеспечивающие осуществление описанных этапов программируемым компьютером. Альтернативно, все этапы или часть их могут быть выполнены при помощи специализированных схем, разработанных для осуществления указанных этапов. В настоящем документе используется предположение, что схема обработки сигнала выполнена с возможностью выполнения этапов, охватывая как реализацию с программируемым компьютером, так и реализацию со специализированными схемами. Программа для такого компьютера может быть предоставлена на компьютерном программном продукте, таком как полупроводниковое запоминающее устройство, магнитный или оптический диск, сигнал, модулированный с информацией, представляющей инструкции, лента и т.п.
Использование: для определения толщины стенки трубопровода. Сущность изобретения заключается в том, что измеряют толщину стенки трубопровода как функцию от положения с использованием распространения ультразвука. Используют серию прогнозных моделей, которые задают прогнозы ультразвуковых сигналов отклика как функцию от различных наборов параметров, которые являются определяющими для ультразвуковой скорости, зависящей от положения, при различных частотах звука и различном пространственном разрешении. Выполняют последовательные итерационные процессы подгонки, каждый из которых подгоняет комбинацию значений последовательного набора параметров к обнаруженным ультразвуковым сигналам отклика в соответствии с соответствующей моделью, используя подогнанные значения из предыдущего процесса подгонки для инициализации следующего набора параметров для итерационной подгонки. По меньшей мере первая модель задает прогнозы значений волновых векторов как функцию от периферического положения в последовательных кольцах вокруг указанной трубы в качестве сумм значений волновых векторов для периферических положений в предыдущем кольце, умноженных на коэффициенты распространения, используя коэффициенты распространения, зависящие от первого набора параметров. Технический результат: повышение достоверности определения толщины стенки трубопровода. 3 н. и 12 з.п. ф-лы, 6 ил.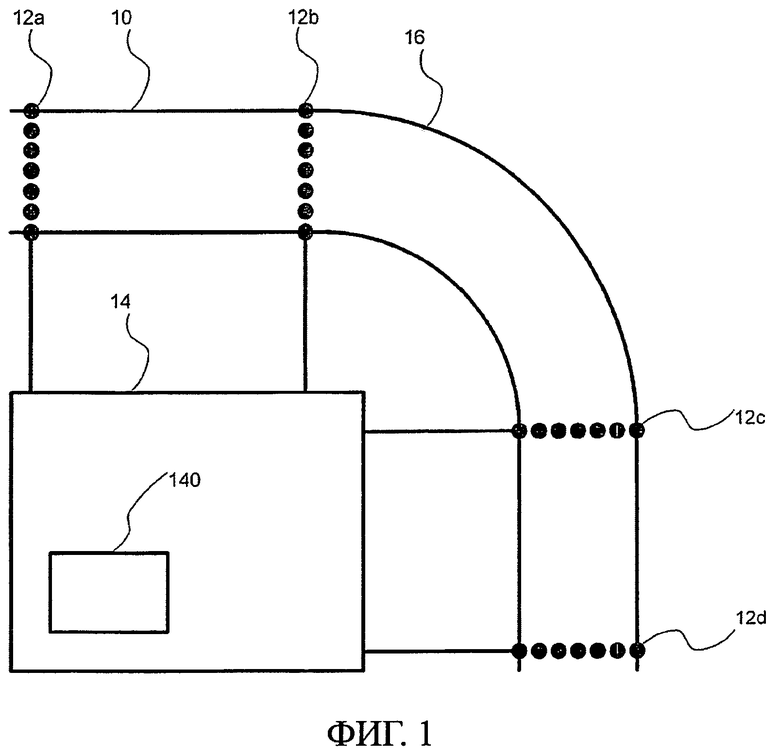
1. Способ осуществления ультразвукового измерения свойств стенки трубопровода, согласно которому:
- обеспечивают наличие набора ультразвуковых передающих устройств и набора ультразвуковых приемных устройств, соединенных с трубопроводом во взаимно различных положениях на указанном трубопроводе;
- передают ультразвуковые сигналы от ультразвуковых передающих устройств в стенку указанного трубопровода;
- обнаруживают ультразвуковые сигналы отклика в ультразвуковых приемных устройствах вследствие распространения указанных ультразвуковых сигналов сквозь указанную стенку;
- обеспечивают наличие первой и второй прогнозных моделей, задающих прогнозы ультразвуковых сигналов отклика как функцию первого и второго наборов параметров, которые являются определяющими для ультразвуковой скорости, зависящей от положения, в указанной стенке при первом и втором пространственном разрешении при первой и второй частоте звука или частотах звука вплоть до первой и второй частоты соответственно,
при этом вторая частота звука является более высокой, чем первая частота звука, а второе пространственное разрешение является более высоким, чем первое пространственное разрешение,
по меньшей мере первая модель задает прогнозы значений волновых векторов как функцию от периферического положения в последовательных кольцах вокруг указанной трубы в качестве сумм значений волновых векторов для периферических положений в предыдущем кольце, умноженных на коэффициенты распространения, используя коэффициенты распространения, зависящие от первого набора параметров;
- выполняют первый и второй итерационные процессы подгонки, подгоняя комбинацию значений первого и второго наборов параметров к обнаруженным ультразвуковым сигналам отклика в соответствии с первой и второй прогнозной моделью соответственно, причем подогнанную комбинацию значений первого набора используют для инициализации второго набора для второго итерационного процесса подгонки.
2. Способ по п. 1, включающий серию прогнозных моделей, содержащую вторую прогнозную модель в качестве начальной прогнозной модели в указанной серии,
при этом каждая прогнозная модель в указанной серии задает прогнозы ультразвуковых сигналов отклика как функцию от соответствующего набора параметров, которые являются определяющими для ультразвуковой скорости, зависящей от положения, в указанной стенке при соответствующем пространственном разрешении при соответствующей частоте звука или звуковых частотах вплоть до указанной соответствующей звуковой частоты,
причем соответствующие звуковые частоты и соответствующие пространственные разрешения увеличиваются для последующих дополнительных прогнозных моделей в указанной серии;
- выполняют последовательные итерационные процессы подгонки, каждым из которых подгоняют комбинации значений соответствующего набора параметров последующей одной прогнозной модели из дополнительных прогнозных моделей к обнаруженным ультразвуковым сигналам отклика в соответствии с указанной последующей одной моделью из дополнительных прогнозных моделей соответственно, при этом значения для каждого следующего последовательного процесса подгонки инициализируют с использованием подогнанных комбинаций значений из предыдущего процесса последовательных процессов подгонки.
3. Способ по п. 1 или 2, в котором вторая прогнозная модель задает прогнозы ультразвуковых сигналов отклика при помощи задания траекторий луча между передающими устройствами и преобразующими устройствами и интегрирования времен прохождения по указанным траекториям в зависимости от ультразвуковой скорости, зависящей от положения, определенной вторым набором параметров.
4. Способ по п. 1 или 2, в котором первый и второй процессы подгонки содержат минимизацию разности между ультразвуковыми амплитудами спрогнозированного ультразвукового отклика и обнаруженного ультразвукового отклика.
5. Способ по п. 1 или 2, в котором трубопровод содержит искривленный участок между ультразвуковыми передающими устройствами и ультразвуковыми передающими устройствами.
6. Способ по п. 1 или 2, в котором передающие устройства и приемные устройства соединены с трубопроводом вдоль первого и второго периферических колец в плоскостях, поперечных осевому направлению указанного трубопровода, соответственно, в каждом из первого и второго колец во взаимно отделенных периферических положениях.
7. Способ по п. 1 или 2, в котором трубопровод поддерживается опорой, имеющей контакт с указанным трубопроводом, при этом указанные передающие устройства и приемные устройства соединены с трубопроводом во взаимно отделенных периферических положениях вдоль линии в осевом направлении трубопровода,
причем передающие устройства и приемные устройства соединены с трубопроводом на взаимно противоположных сторонах указанного контакта соответственно.
8. Способ по п. 1 или 2, в котором переданный ультразвуковой сигнал является широкополосным сигналом, содержащим как первую, так и вторую частоты, а первый и второй процессы подгонки применяют к выбранным частотным составляющим обнаруженных ультразвуковых сигналов отклика.
9. Система для осуществления ультразвукового измерения свойств стенки трубопровода, содержащая
- набор ультразвуковых передающих устройств и набор ультразвуковых приемных устройств для соединения с трубопроводом во взаимно различных положениях на указанном трубопроводе;
- схему возбуждения и обнаружения, соединенную с указанными передающими устройствами и приемными устройствами;
- схему обработки сигнала, соединенную со схемой возбуждения и обнаружения для приема сигналов отклика вследствие ультразвуковой передачи между парами передающих устройств и приемных устройств, при этом схема обработки сигнала выполнена с возможностью осуществления первого и второго итерационных процессов подгонки, подгоняя комбинацию значений первого и второго наборов первой и второй прогнозной модели к обнаруженным ультразвуковым сигналам отклика соответственно, причем подогнанную комбинацию значений первого набора используют для инициализации второго набора для второго итерационного процесса подгонки,
причем первая и вторая прогнозные модели задают прогнозы ультразвуковых сигналов отклика как функцию от первого и второго наборов параметров, которые являются определяющими для ультразвуковой скорости, зависящей от положения, в указанной стенке при первом и втором пространственном разрешении при первой и второй частоте звука или частотах звука вплоть до первой и второй частоты соответственно,
при этом вторая частота звука является более высокой, чем первая частота звука, а второе пространственное разрешение является более высоким, чем первое пространственное разрешение,
по меньшей мере первая модель задает прогнозы значений волнового вектора как функцию от периферического положения в последовательных кольцах вокруг указанной трубы в качестве сумм значений волновых векторов для периферических положений в предыдущем кольце, умноженных на коэффициенты распространения, используя коэффициенты распространения, зависящие от первого набора параметров.
10. Система по п. 9, в которой схема обработки сигнала выполнена с возможностью использования серии прогнозных моделей, содержащей вторую прогнозную модель в качестве начальной прогнозной модели в указанной серии,
при этом каждая прогнозная модель в указанной серии задает прогнозы ультразвуковых сигналов отклика как функцию от соответствующего набора параметров, которые являются определяющими для ультразвуковой скорости, зависящей от положения, в указанной стенке при соответствующем пространственном разрешении при соответствующей частоте звука или частотах звука вплоть до соответствующей частоты звука,
причем соответствующие частоты звука и соответствующие пространственные разрешения увеличиваются для последующих дополнительных прогнозных моделей в указанной серии,
а схема обработки сигнала выполнена с возможностью выполнения последовательных итерационных процессов подгонки, каждым из которых подгоняют комбинацию значений соответствующего набора параметров последующей одной прогнозной модели из дополнительных прогнозных моделей к обнаруженным ультразвуковым сигналам отклика в соответствии с указанной последующей моделью из дополнительных прогнозных моделей соответственно, при этом значения для каждого следующего последовательного процесса подгонки инициализируют с использованием подогнанной комбинации значений из предыдущего процесса последовательных процессов подгонки.
11. Система по п. 9 или 10, в которой вторая прогнозная модель задает прогнозы ультразвуковых сигналов отклика при помощи задания траекторий луча между передающими устройствами и преобразующими устройствами и интегрирования времен прохождения по указанным траекториям в зависимости от ультразвуковой скорости, зависящей от положения, определенной вторым набором параметров.
12. Система по п. 9 или 10, в которой указанные передающие устройства и приемные устройства расположены на трубопроводе, который содержит искривленный участок между ультразвуковыми передающими устройствами и ультразвуковыми передающими устройствами.
13. Система по п. 9 или 10, в которой передающие устройства и приемные устройства соединены с трубопроводом вдоль первого и второго периферических колец в плоскостях, поперечных осевому направлению указанного трубопровода, соответственно, в каждом из первого и второго колец во взаимно отделенных периферических положениях.
14. Система по п. 9 или 10, в которой трубопровод поддерживается опорой, имеющей контакт с указанным трубопроводом, при этом указанные передающие устройства и приемные устройства соединены с трубопроводом во взаимно отделенных периферических положениях вдоль линии в осевом направлении трубопровода,
причем передающие устройства и приемные устройства соединены с трубопроводом на взаимно противоположных сторонах указанного контакта соответственно.
15. Машиночитаемый носитель данных, содержащий программу инструкций для программируемого компьютера, которая при выполнении указанным компьютером обеспечивает осуществление указанным компьютером способа по любому из предыдущих пунктов, относящихся к способу.
| WO 2009087342A1, 16.07.2009 | |||
| WO 2009139627A1, 19.11.2009 | |||
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2000 |
|
RU2156455C1 |
| СПОСОБ ОЦЕНКИ ПРОФИЛЯ ТРУБЫ ПРИ УЛЬТРАЗВУКОВОМ МЕТОДЕ КОНТРОЛЯ | 1995 |
|
RU2114447C1 |
| СПОСОБ ВНУТРИТРУБНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2001 |
|
RU2212660C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТРУБОПРОВОДОВ | 2003 |
|
RU2312334C2 |

