1. Область техники
Варианты осуществления данного изобретения в целом относятся к глобальным спутниковым навигационным системам (ГСНС, также известным специалистам как GNSS), в частности (но не исключительно) - к системе и способу, которые распространяют возможности навигационных систем на закрытые пространства, в которых прием спутниковых сигналов существенно ограничен, такие как внутреннее пространство зданий.
2. Описание уровня техники
Глобальная спутниковая навигационная система (ГСНС) состоит из сети или совокупности спутников на околоземной орбите, передающих сигналы, использующиеся наземными приемниками в целях навигации. Наиболее развитой и широко используемой системой ГСНС в настоящее время является система GPS, функционирование которой обеспечивается Соединенными Штатами Америки. К другим системам ГСНС относятся российская система ГЛОНАСС и находящиеся в процессе создания навигационные системы Galileo (Европа) и Compass (Китай). Настоящее изобретение раскрывается в этом документе в терминах системы GPS, но для специалиста будет ясно, что принципы данного изобретения могут использоваться в контексте других систем ГСНС. Система GPS включает в себя от 24-х до 32-х спутников на средневысотной околоземной орбите. Каждый спутник непрерывно передает навигационное сообщение, которое модулируется его собственным уникальным псевдослучайным бинарным кодом (псевдослучайным шумовым кодом, ПШ-кодом, также известным специалистам как PRN), ортогональным по отношению ко всем другим ПШ-кодам других спутников. Применяемый для измерений расстояний код GPS, доступный для использования всеми желающими, представляет собой "грубый" (известный специалистам как "Clear Acquisition", или "С/А") код, который является ПШ-кодом из 1023 бит. Навигационное сообщение включает в себя такую информацию, как время его передачи, эфемериду, которая точно описывает орбиту этого спутника, и альманах, который содержит основные параметры орбит и информацию о состоянии всех спутников в сети. Эфемерида обновляется каждые два часа и в целом является актуальной на протяжении четырех часов.
На приемном конце приемник GPS генерирует свои собственные копии С/А кодов, номинально синхронизированные с данными, передаваемыми спутниками. Когда приемник принимает С/А коды наблюдаемых в настоящее спутников (обычно 8-12 спутников на открытой местности), он сопоставляет свои копии С/А кодов с принятыми С/А кодами для определения спутников, передаваемые сообщения которых были приняты. Расстояния до этих спутников могут определяться вычитанием времени передачи сообщения из времени его принятия (для получения времени прохождения сообщения) и делением полученного результата на скорость света. Зная эфемериды, приемник может вычислить местоположения спутников в моменты передачи сообщений.
Если бы часы приемника были идеально точно синхронизированы с часами спутников, то сигналов от трех спутников было бы достаточно для триангуляции местонахождения (горизонтальные координаты x и y и высота z) данного приемника. Поскольку часы, которые могут быть с требуемой точностью синхронизированы с атомными часами, используемыми спутниками, слишком дорогостоящи для обычного использования, то для определения x, y, z и смещения dt времени часов приемника от часов GPS используются сигналы от четырех или более спутников. Если для навигации требуются только горизонтальные координаты, то достаточно сигналов от трех спутников.
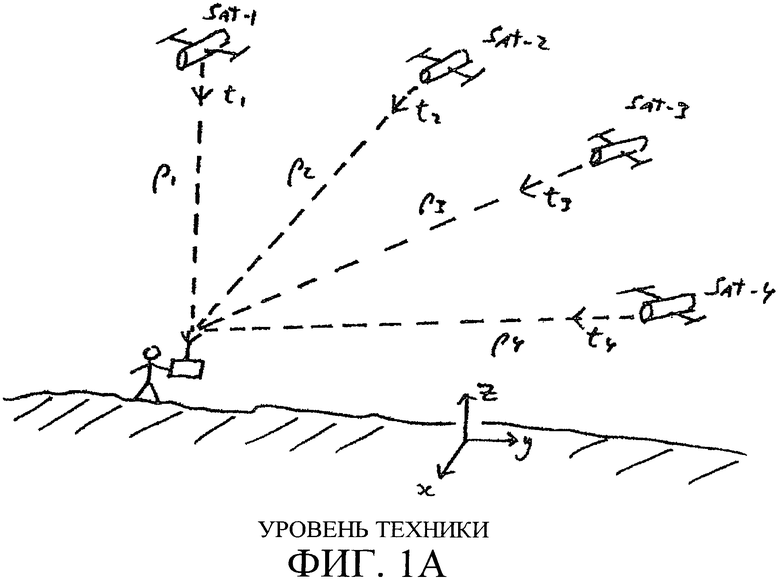
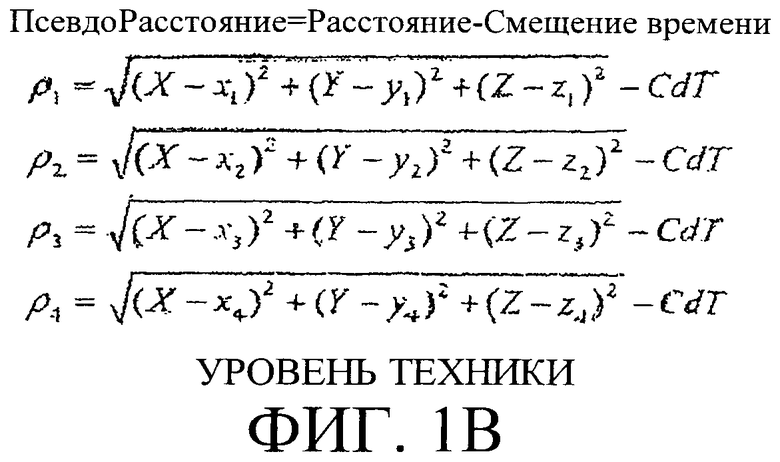
Фигура 1А и 1B иллюстрируют описанный выше процесс, с помощью которого обычные приемники ГСНС получают информацию о местонахождении с использованием спутниковых сигналов ГСНС. На Фиг.1А четыре спутника, Sat-1-Sat-4, передают навигационные сообщения в моменты времени t1-t4. Эти четыре сигнала принимаются приемником ГСНС, который изображен в руках у пользователя. Приемник идентифицирует эти четыре спутника по уникальному С/А коду каждого спутника. Расстояние "p" до каждого спутника определяется, как отмечалось выше, вычитанием времени передачи сообщения (t1-t4) от времени его получения и делением полученного результата на скорость света "С". На основании эфемериды могут быть определены координаты местоположения каждого спутника в момент передачи сообщения, т.е. местоположения Sat-1 (x1, y1, z1), Sat-2 (x2, y2, z2) и т.д. Фиг.1В показывает, как упомянутые значения расстояния и местоположения могут быть использованы в четырех уравнениях для определения координат (X, Y, Z) местонахождения приемника ГСНС и смещения "dT" времени приемника относительно часов спутников.
Один из аспектов основанной на использовании ГСНС навигации заключается в том, что такая навигация не может осуществляться в помещении, так как стены и крыши зданий действуют как препятствия, которые не пропускают или ослабляют спутниковые сигналы. Схожие проблемы встречаются и на некоторых открытых пространствах, таких как естественные каньоны, городские районы с высокой застройкой ("городские каньоны") и глубокие горные долины. При таких условиях передаваемые спутниками сообщения или недоступны, или обладают очень низкими уровнями мощности сигнала, меньшими чем уровень мощности фонового шума, так что они не пригодны к использованию стандартным немодифицированным приемником GPS.
Это представляет собой проблему, так как приблизительно 80% дневной активности осуществляется в помещениях, таких как дома, офисы, торговые центры и лифты. Кроме того, становится невозможным непрерывное обслуживание, когда, например, человек заходит с улицы в торговый центр или здание, или при заезде на подземную парковку, или при проезде через туннель.
Было предпринято много попыток решить эту проблему. В одном из подходов по всему зданию или закрытому пространству устанавливают сети физических датчиков, таких как инфракрасные датчики, ультразвуковые датчики или датчики давления. Проблема с физическими датчиками, однако, заключается в необходимости развертывания обширной инфраструктуры.
В другом подходе используются альтернативные типы датчиков, которые позволяют осуществить локацию с использованием автономных средств на стороне пользователя. Эти автономные средства включают в себя одометрические, акселерометрические, гироскопические и магнитометрические датчики. Принцип этого подхода заключается в использовании сигналов ГСНС пока они доступны, с переключением на другие датчики при недоступности сигналов ГСНС. Однако этот подход оказывается эффективным только при очень точном моделировании перемещений пользователя.
В других подходах вместо физических датчиков используются современные телекоммуникационные технологии. Например, в одном из способов используются мобильные телекоммуникационные сети, такие как GSM и UMTS, это способ реализован такими технологиями как TDOA, E-TDOA и угломерный метод (известен специалистам как "Angle of Arrival"). Этот способ считается непрактичным, так как для определения местонахождения по нему мобильный терминал должен видеть минимум три базовые станции. Этот подход также характеризуется неточностью определения местонахождения, обусловленной тем, что принимаемый сигнал может проходить от передатчика к приемнику по нескольким различным маршрутам.
В другом "телекоммуникационном" подходе используется открытая или общедоступная инфраструктура, предназначенная для других целей, таких как мобильный доступ к Интернет или WiFi. В этом случае расчеты ГСНС основываются на измерениях времени. Однако информация о времени, поступающая из не относящихся к ГСНС источников, как правило, не является точной, что приводит к приблизительному и нестабильному характеру результату навигации. Для реализации точной навигации при использовании этого подхода необходимо серьезно усовершенствовать систему опорного времени по сравнению с существующими в настоящее время возможностями системы времени беспроводных локальных сетей (WLAN).
Еще одна технология определения местонахождения основывается на измерении уровня мощности принимаемого сигнала (RSSI). Однако эта технология требует от системы беспроводной связи увеличения количества точек доступа до уровня, значительно превышающего число точек доступа, необходимое для целей связи. Эти технологии также характеризуются неточностью определения местонахождения, обусловленной тем, что принимаемый сигнал может проходить от передатчика к приемнику по нескольким различным маршрутам.
Некоторые подходы к решению проблемы навигации в помещении основаны на использовании ГСНС. Например, в одной из технологий используются "псевдоспутники", которые образуют локальную наземную совокупность из нескольких спутников (например, генераторов). Проблема этого подхода, однако, заключается в необходимости осуществления синхронизации псевдоспутников. Кроме того, этот подход характеризуется неточностью определения местонахождения, обусловленной тем, что принимаемый сигнал может проходить от передатчика к приемнику по нескольким различным маршрутам.
Другая технология, основанная на использовании ГСНС, предполагает размещение в помещениях ретрансляторов сигналов ГСНС. Эти ретрансляторы, однако, просто передают информацию о внешнем местонахождении. Таким образом, эта технология в действительности не обеспечивает информации для навигации в помещении.
Таким образом, существующие в настоящее время технологии охвата навигацией помещений обеспечивают лишь ограниченную и неточную навигацию в помещениях и других ограниченных или заблокированных пространствах. Кроме того, многие из этих технологий требуют той или иной модификации приемника ГСНС, чтобы сделать его способным распознавать и использовать вспомогательную или дополнительную информацию. Необходимость в модификации приемника сопряжена с понятными неудобствами, увеличивает стоимость приемника, а польза от нее будет только в тех местах, где оказалась реализованной именно данная конкретная технология.
Сущность изобретения
Согласно одному аспекту данного изобретения предлагается навигационная система для замкнутого пространства, включающая в себя:
а) по меньшей мере одну станцию приема спутниковых сигналов, расположенную за пределами замкнутого пространства, предназначенную для приема спутниковых сигналов, передаваемых совокупностью спутников, и определения соответствующей передаваемым сигналам информации, имеющей отношение к синхронизации времени;
b) по меньшей мере одну локальную передающую станцию, расположенную в пределах данного замкнутого пространства, предназначенную для передачи локального сигнала, совместимого с передаваемыми спутниковыми сигналами; и
c) канал связи, предназначенный для передачи информации, имеющей отношение к самосогласованию, между каждой из станций и по меньшей мере одной другой станцией;
причем каждая локальная передающая станция использует информацию, имеющую отношение к самосогласованию, для формирования упомянутого локального сигнала;
и причем по меньшей мере один локальный сигнал предоставляет навигационную информацию, пригодную к использованию приемником спутниковой навигационной системы.
В одном из вариантов станция приема спутниковых сигналов дополнительно включает в себя передатчик, предназначенный для передачи локального сигнала, совместимого с передаваемыми спутниковыми сигналами.
В одном из вариантов информация, имеющая отношение к самосогласованию, включает в себя информацию об уровнях мощности локальных сигналов.
В одном из вариантов локальный сигнал содержит имитацию по меньшей мере трех передаваемых спутниковых сигналов.
В одном из вариантов локальный сигнал содержит имитацию четырех передаваемых спутниковых сигналов.
В одном из вариантов информация, имеющая отношение к самосогласованию, дополнительно передает информацию для идентификации множества передаваемых спутниковых сигналов.
В одном из вариантов навигационная система включает в себя множество локальных передающих станций, каждая из которых выполнена с возможностью выбора каналов, отличных от каналов соседних станций.
В одном из вариантов каждые две соседние локальные передающие станции разнесены на соответствующее расстояние, причем дальность передачи локальных сигналов не превышает этого расстояния, но превышает половину этого расстояния.
В одном из вариантов дальность передачи локальных сигналов составляет приблизительно 0,7 упомянутого расстояния.
В одном из вариантов навигационная система включает в себя две станции приема спутниковых сигналов, расположенные за пределами данного замкнутого пространства, причем информация, имеющая отношение к самосогласованию, для каждой локальной передающей станции включает в себя информацию, имеющую отношение к синхронизации времени, от двух станций,
причем локальный сигнал, передаваемый каждой локальной передающей станцией, предоставляет в существенной степени точную информацию о местонахождении для двумерного пространства.
В одном из вариантов навигационная система включает в себя три станции приема спутниковых сигналов, расположенные за пределами данного замкнутого пространства, причем информация, имеющая отношение к самосогласованию, для каждой локальной передающей станции включает в себя информацию, имеющую отношение к синхронизации времени, от трех станций,
причем локальный сигнал, передаваемый каждой локальной передающей станцией, предоставляет в существенной степени точную информацию о местонахождении для трехмерного пространства.
В одном из вариантов каждая станция приема спутниковых сигналов имеет приемную антенну для приема спутниковых навигационных сигналов, передающую антенну для передачи локального сигнала и процессор для выполнения алгоритмов самосогласования.
В одном из вариантов упомянутый канал связи является беспроводным.
В одном из вариантов упомянутый канал связи включает в себя неиспользуемые каналы спутниковой навигации.
В одном из вариантов упомянутый канал связи включает в себя проводное соединение между соседними станциями.
Согласно другому аспекту данного изобретения предлагается способ предоставления информации спутниковых сигналов в замкнутом пространстве, включающий:
a) размещение в замкнутом пространстве множества локальных передатчиков; и
b) передачу локальных сигналов, совместимых с передаваемыми спутниковыми сигналами;
причем упомянутые локальные сигналы предоставляют навигационную информацию, пригодную к использованию приемником спутниковой системы навигации.
В одном из вариантов способ дополнительно включает обмен с локальными передатчиками информацией, имеющей отношение к самосогласованию.
В одном из вариантов локальные сигналы предоставляют информацию от множества спутников.
Эти, дополнительные и/или другие аспекты и/или преимущества данного изобретения рассмотрены в последующем подробном описании изобретения или же станут очевидными из него и/или при практическом осуществлении данного изобретения.
Краткое описание фигур
Данное изобретение будет пояснено с помощью нижеследующего подробного описания, которое следует рассматривать в сочетании с фигурами, где:
Фиг.1А - графическое представление спутниковой навигационной системы, известной из уровня техники, показывающее четыре спутника и пользователя, держащего приемник ГСНС;
Фиг.1В - математические уравнения, используемые в спутниковой навигационной системе, известной из уровня техники;
Фиг.2А - функциональная схема спутниковой навигационной системы для помещений по одному из вариантов осуществления данного изобретения, показывающая эту систему при использовании в замкнутом пространстве при действующем ("постоянном") соединении с расположенными в небе спутниками;
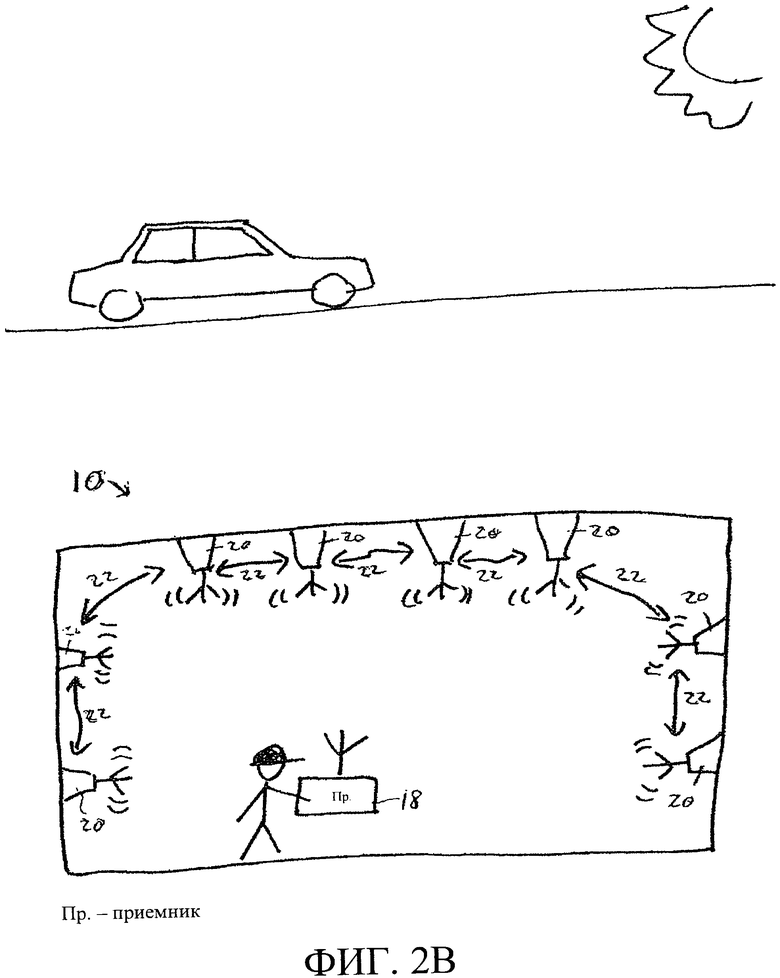
Фиг.2В - функциональная схема спутниковой навигационной системы для помещений по одному из вариантов осуществления данного изобретения, показывающая эту систему при использовании в замкнутом пространстве в автономном режиме;
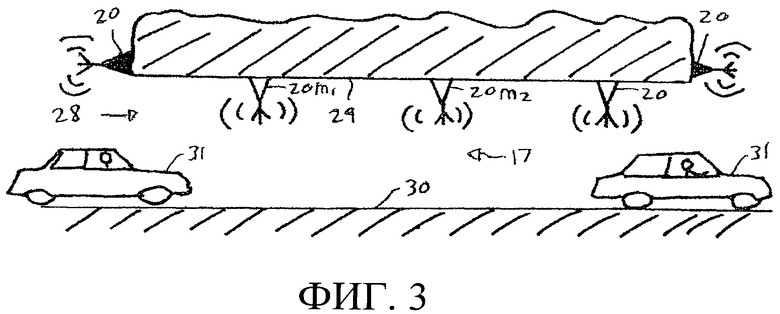
Фиг.3 - иллюстрация спутниковой навигационной системы для помещений по одному из вариантов осуществления данного изобретения, показывающая эту систему при использовании в туннеле;
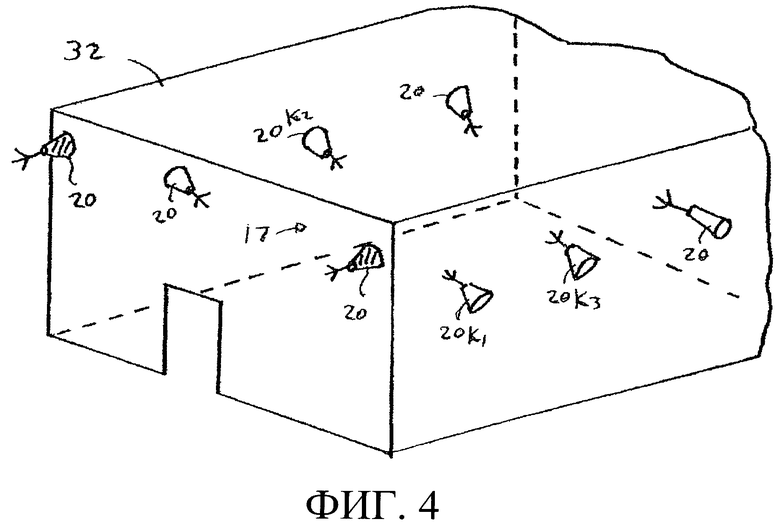
Фиг.4 - иллюстрация спутниковой навигационной системы для помещений по одному из вариантов осуществления данного изобретения, показывающая эту систему при использовании в условиях одноэтажного помещения;
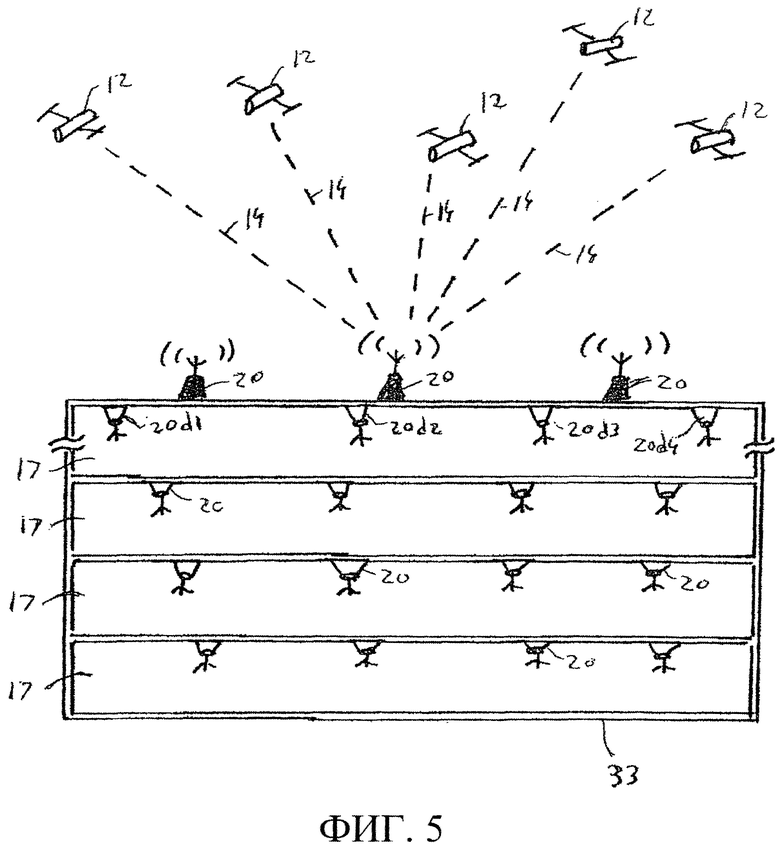
Фиг.5 - иллюстрация спутниковой навигационной системы для помещений по одному из вариантов осуществления данного изобретения, показывающая эту систему при использовании в условиях многоэтажного помещения;
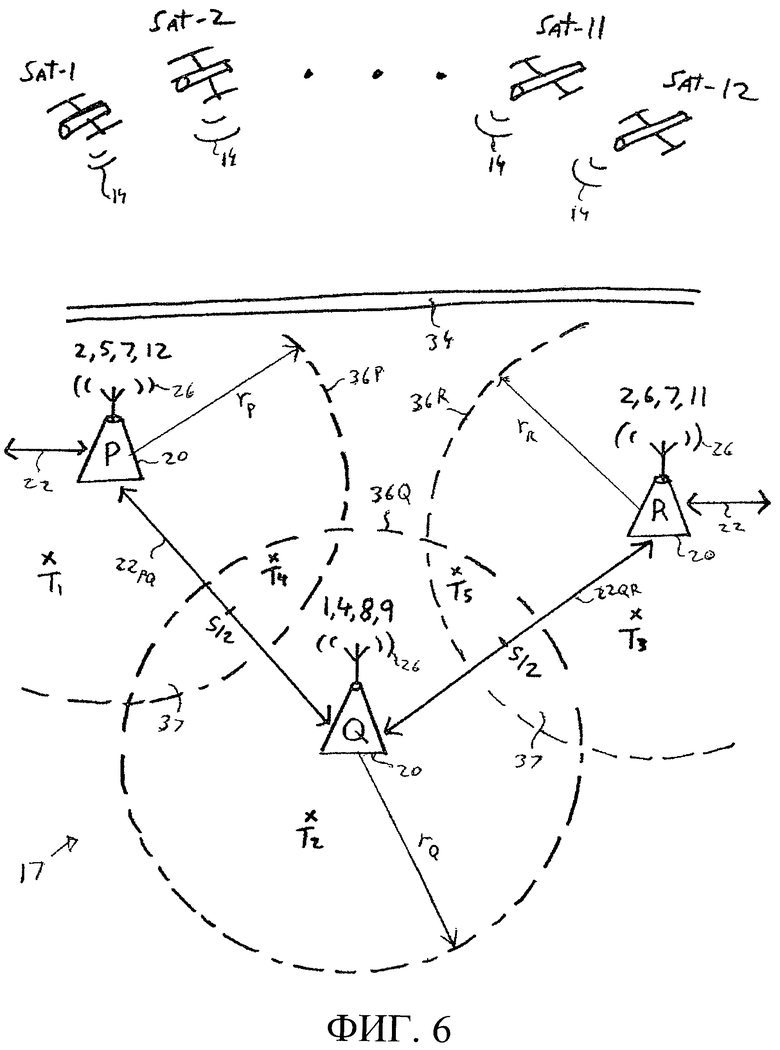
Фиг.6 - функциональная схема части спутниковой навигационной системы для помещений по одному из вариантов осуществления данного изобретения, показывающая три имитирующих микроустройства и определенные взаимосвязи между ними;
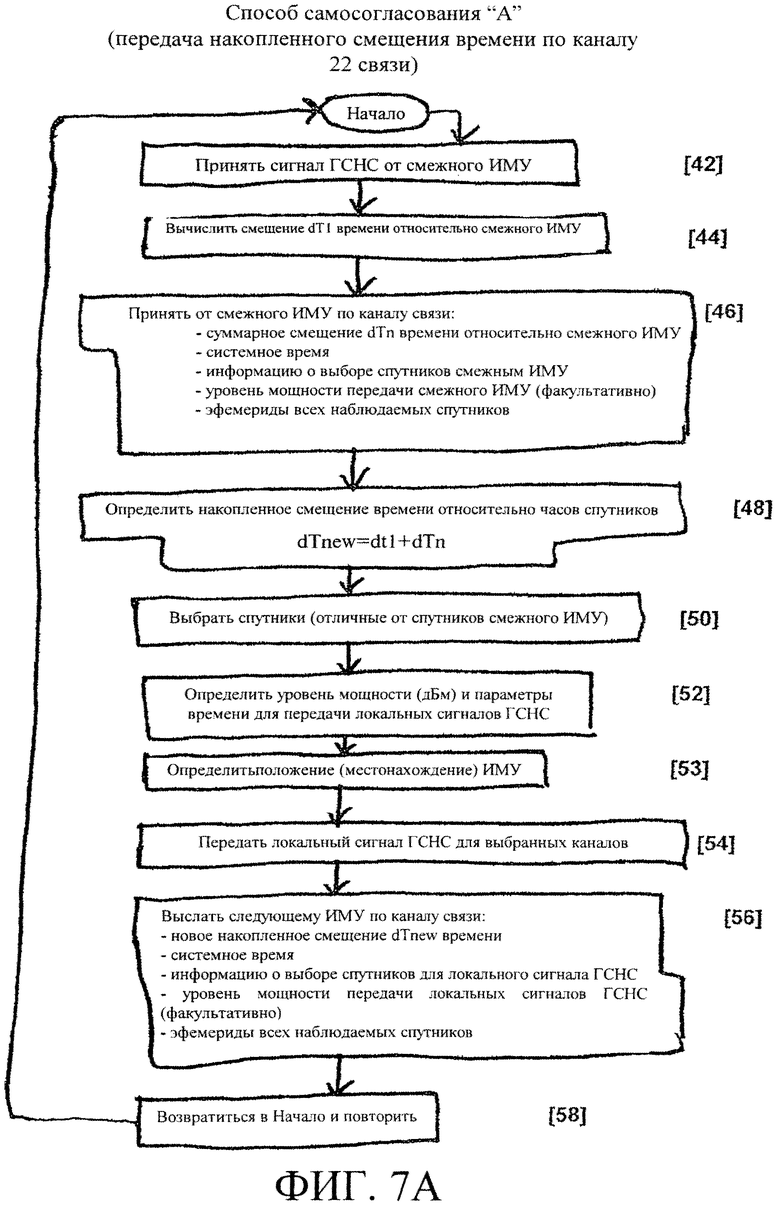
Фиг.7А - блок-схема алгоритма самосогласования одного из возможных типов, выполняемого имитирующими микроустройствами, соответствующего одному из вариантов осуществления данного изобретения;
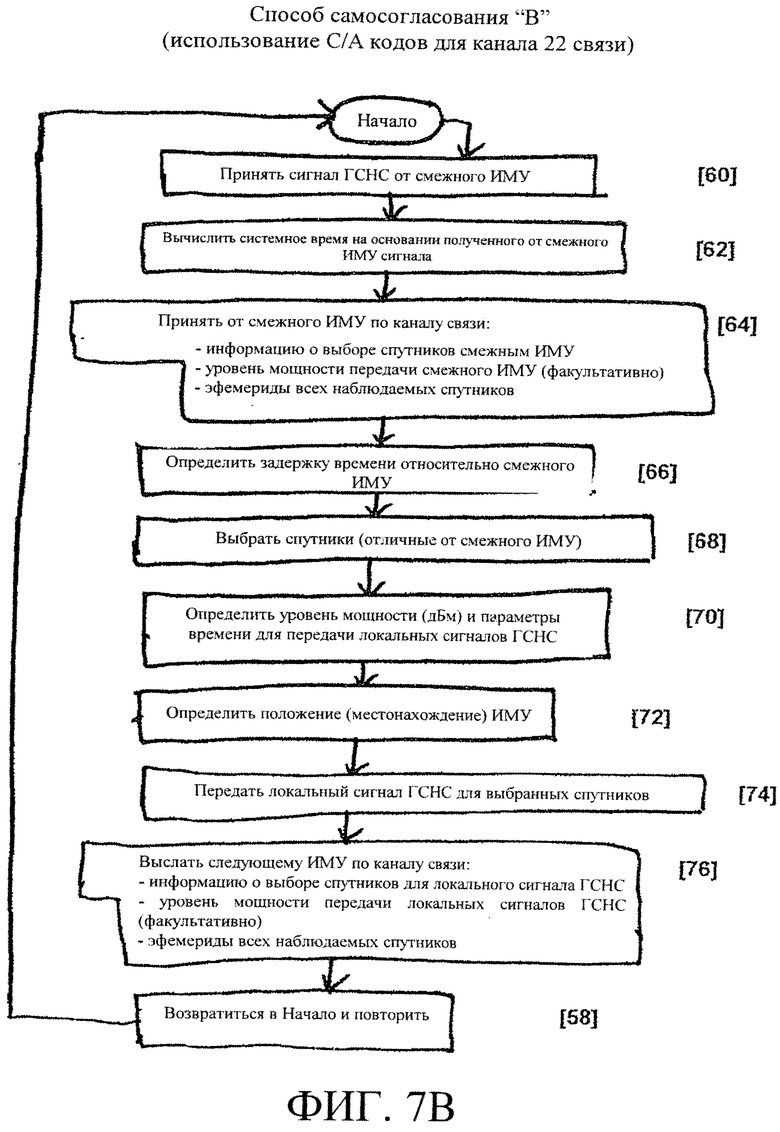
Фиг.7B - блок-схема другого типа алгоритма самосогласования, выполняемого имитирующими микроустройствами, соответствующего одному из вариантов осуществления данного изобретения;
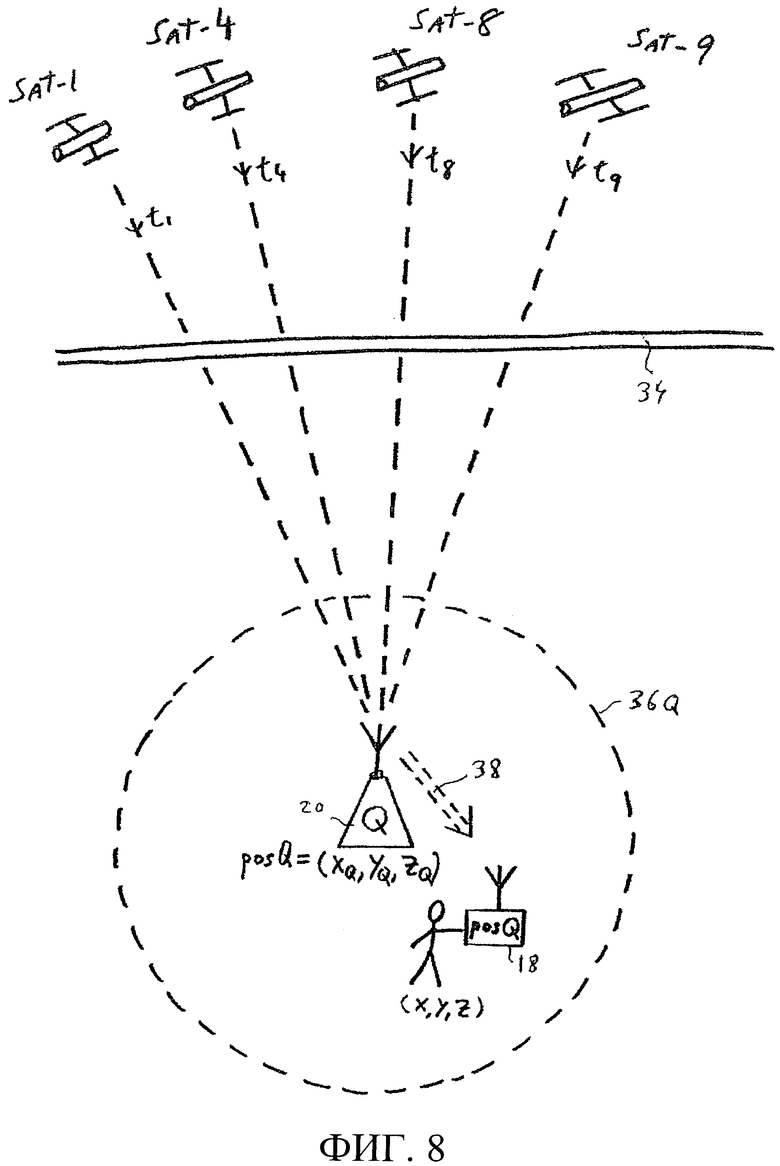
Фиг.8 - функциональная схема с имитирующим микроустройством "Q" с Фиг.6, поясняющая предоставление сигналов ГСНС находящемуся поблизости приемнику в соответствии с настоящим изобретением;
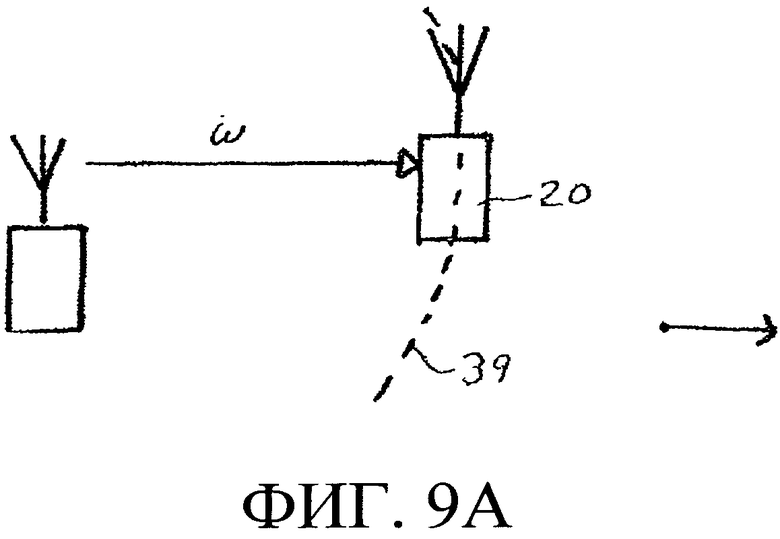
Фиг.9А - функциональная схема, показывающая вычисление смещения dT времени между имитирующим микроустройством и одним опорным имитирующим микроустройством в соответствии с одним из вариантов осуществления данного изобретения;
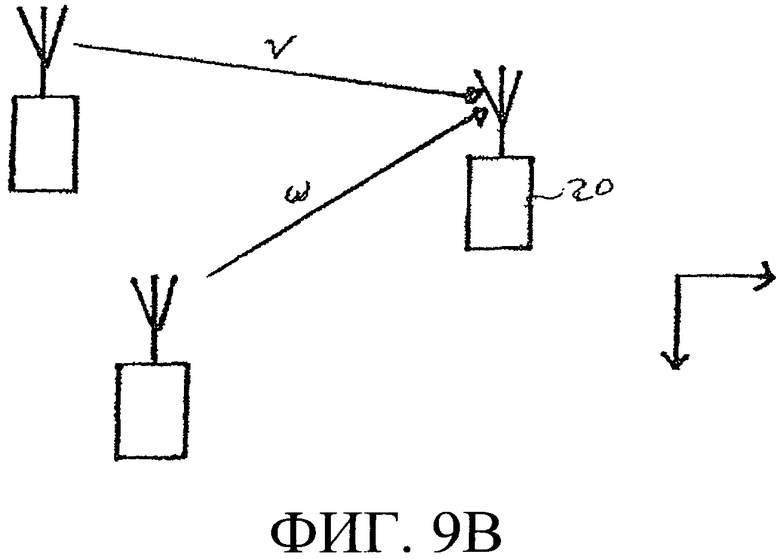
Фиг.9B - функциональная схема, показывающая вычисление смещения dT времени между имитирующим микроустройством и двумя опорными имитирующими микроустройствами в соответствии с одним из вариантов осуществления данного изобретения;
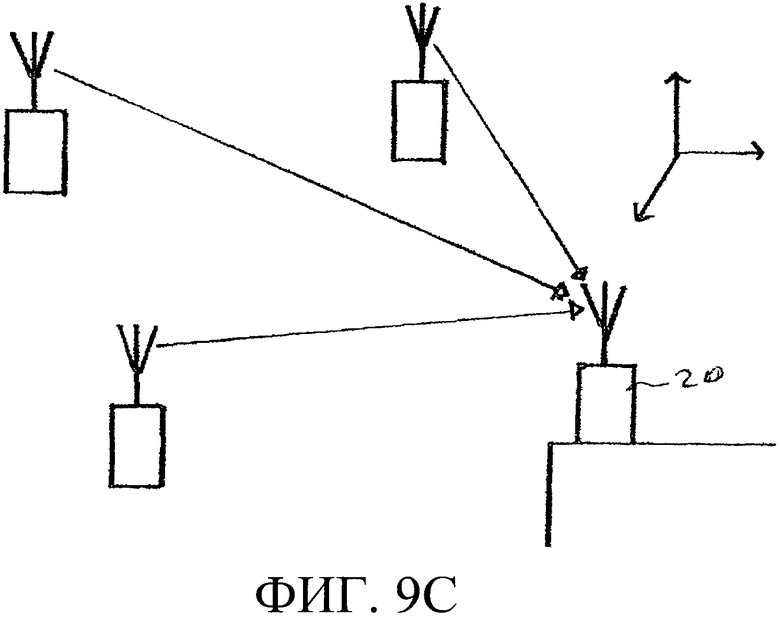
Фиг.9С - функциональная схема, показывающая вычисление смещения dT времени между имитирующим микроустройством и тремя опорными имитирующими микроустройствами в соответствии с одним из вариантов осуществления данного изобретения;
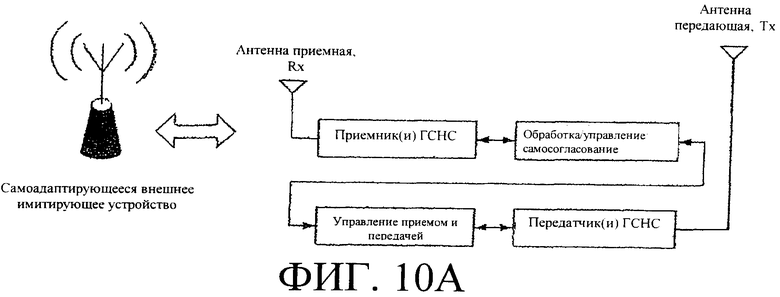
Фиг.10A - функциональная схема внешнего, или наружного, имитирующего микроустройства, которое используется в спутниковой навигационной системе для помещений в соответствии с одним из вариантов осуществления данного изобретения; и
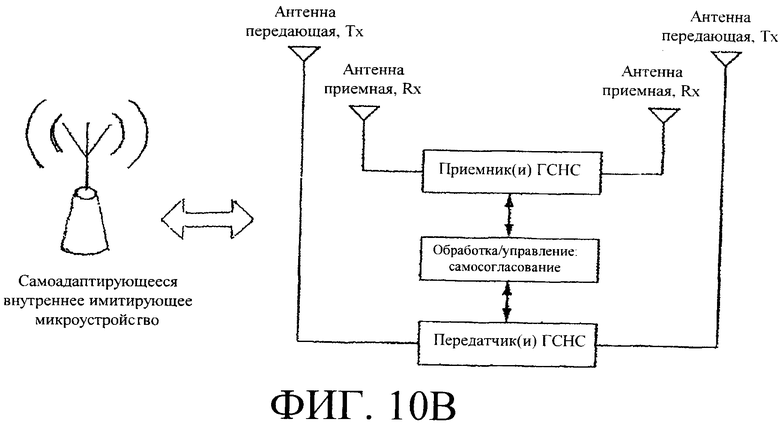
Фиг.10B - функциональная схема внутреннего, или устанавливаемого в помещении, имитирующего микроустройства, которое используется в спутниковой навигационной системе для помещений в соответствии с одним из вариантов осуществления данного изобретения.
Подробное описание изобретения
Ниже будут подробнее рассмотрены варианты осуществления данного изобретения, примеры которых иллюстрированы прилагаемыми фигурами, причем одни и те же позиции на разных фигурах обозначают подобные компоненты. Эти варианты осуществления описаны ниже для пояснения данного изобретения с использованием фигур графических материалов.
На Фиг.2A показана функциональная схема спутниковой навигационной системы 10 для помещений, соответствующая одному из вариантов осуществления данного изобретения. На этой фигуре показаны пять спутников 12, являющихся частью глобальной спутниковой навигационной системы (ГСНС). Спутники 12 находятся на космической орбите и передают сигналы 14 ГСНС в направлении земной поверхности. Как показано, на земной поверхности расположено здание или место 16 с замкнутым пространством 17. Спутниковые сигналы 14 ГСНС не могут проникнуть в замкнутое пространство 17 из-за препятствий в виде крыши и стен здания. Соответственно, приемник 18 ГСНС (или GPS), расположенный внутри здания в замкнутом пространстве 17, не может получить информацию, необходимую для его работы и для предоставления информации о местонахождении.
Для большей ясности следует оговорить, что термин "замкнутое пространство" или "замкнутое пространство 17" может обозначать любое частично или полностью замкнутое пространство, участок или территорию с определенными условиями окружающей среды, где полностью, в существенной мере или частично заблокировано проникновение сигналов ГСНС, так что уровень мощности сигналов ГСНС слишком низок для их использования или вообще не наблюдается. Замкнутые пространства могут быть самые разнообразные, включая, например, внутренние этажи и помещения зданий, торговые центры, подземные паркинги и гаражи, лифты, скрытые горные дороги, улицы "городских каньонов", где высокая застройка препятствует приему сигналов ГСНС, проходящие через туннели дороги, суда и самолеты. Аналогично, термин "открытое пространство" означает пространство, участок или территорию с определенными условиями окружающей среды, которые не являются замкнутыми пространствами, т.е. где обычные сигналы ГСНС принимаются приемниками ГСНС и имеют уровень мощности, достаточный для обеспечения возможности их использования для определения местонахождения. В соответствии с некоторыми вариантами осуществления система 10 по данному изобретению включает в себя по меньшей мере две станции или "имитирующих микроустройства" (ИМУ) 20, установленные в здании 16 в замкнутом пространстве 17. Имитирующее микроустройство представляет собой устройство, в состав которого входят многоканальный передатчик ГСНС, приемник ГСНС и дополнительные обрабатывающие и коммуникационные компоненты, дающие этому устройству возможность передавать и имитировать спутниковые сигналы ГСНС и обмениваться информацией с другими имитирующими микроустройствами. Имитирующие микроустройства могут отличаться тем, что их передатчик (Тх) и приемник (Rx) предназначены для функционирования или в пределах замкнутого пространства 17, т.е. в помещении, или "внутри", или за пределами замкнутого пространства 17, т.е. вне помещения, или "снаружи". "Наружное имитирующее микроустройство" - это устройство, в котором либо передатчик (Тх), либо приемник (Rx) работает вне помещения, тогда как второй из этих компонентов работает внутри помещения. "Внутреннее имитирующее микроустройство" - это устройство, в котором и передатчик, и приемник работают в помещении. Соответственно, существуют три типа ИМУ: "Rx-Снаружи-Тх-Внутри" наружное ИМУ, "Rx-Внутри-Тх-Снаружи" наружное ИМУ, и внутреннее ИМУ, тип которого всегда "Rx-Внутри-Тх-Внутри".
У наружного ИМУ типа "Rx-Снаружи-Тх-Внутри" приемник расположен вне помещения и может принимать спутниковые сигналы 14 ГСНС непосредственно от спутников 12 подобно приемнику ГСНС. Передатчик наружного ИМУ типа "Rx-Внутри-Тх-Снаружи" способен обеспечивать внешнее покрытие. В некоторых из возможных вариантов реализации этот тип ИМУ может использоваться для обеспечения дополнительного покрытия. Во многих вариантах применения будет использоваться относительно большое количество внутренних имитирующих микроустройств, поскольку этот тип ИМУ используется для охвата и обеспечения непрерывного навигационного покрытия в пределах замкнутого пространства 17.
Обращаясь к Фиг.2А, можно видеть, что в этом примере в системе 10 имеются три имитирующих микроустройства: наружное ИМУ 20А и внутренние ИМУ 20B и 20C. В наружном ИМУ 20А есть приемник 24, который расположен вне помещения и может принимать спутниковые сигналы 14, и передатчик 25, осуществляющий передачу сигналов в помещении, т.е. в замкнутом пространстве 17. Внутренние ИМУ 20B и 20C и принимают, и передают сигналы внутри замкнутого пространства 17. Для большей ясности на графических фигурах наружные имитирующие микроустройства показаны заштрихованными, а внутренние имитирующие микроустройства показаны незаштрихованными.
Система 10 также включает в себя средства связи имитирующих микроустройств, обеспечивающие возможность передачи и обмена определенной информацией. Эти средства представлены на Фиг.2A линией 22. Как будет более подробно описано ниже, линия 22 связи может быть реализована множеством способов, включающих в себя, например, проводные или беспроводные технологии, и, соответственно, может включать в себя дополнительное оборудование или обходиться без него.
По меньшей мере одно ИМУ действует в качестве ИМУ опорной синхронизации (или просто "опорного ИМУ"), которое представляет собой имитирующее микроустройство, обладающее информацией о своем местонахождении. Опорное ИМУ может быть наружным ИМУ с приемной антенной (Rx), которая позволяет принимать сигналы 14 ГСНС от спутников, и с их помощью определять свое местонахождение. Внутреннее ИМУ также может быть опорным ИМУ, даже если оно не может принимать сигналы ГСНС от спутника, при условии, что оно обеспечивается информацией о своем местонахождении администратором системы. Например, может быть проведено исследование для определения местонахождения ИМУ, и затем полученные данные о местонахождении вводятся в процессор этого внутреннего ИМУ.
Информация последовательно проходит через все ИМУ системы 10, начиная с опорного ИМУ. Например, на Фиг.2А информация проходит от наружного ИМУ 20А (подразумевается, что это ИМУ является опорным) ко внутреннему ИМУ 20B, и от внутреннего ИМУ 20B ко внутреннему ИМУ 20С. Вариант осуществления по Фиг.2A может называться "действующим подключением", так как в этом варианте осуществления есть наружное ИМУ, которое поддерживает действующее (в реальном времени) подключение к наблюдаемым спутникам ГСНС и может активно получать информацию о своем местонахождении.
Каждое ИМУ 20 на Фиг.2A передает локальный сигнал 26 глобальной спутниковой навигационной системы, содержащий сигналы, которые могли бы быть получены от четырех или более (обычно от четырех) спутников глобальной спутниковой навигационной системы в некотором расчетном местонахождении, если бы эти спутники были наблюдаемы из этого местонахождения. Локальный сигнал 26 ГСНС может рассматриваться как сымитированный спутниковый сигнал, созданный в ИМУ 20. Упомянутое расчетное местонахождение обычно является местом расположения ИМУ, но оно также может быть другим местонахождением, которое связано с местом расположения ИМУ или смещено относительно него. Соответственно, в показанном на Фиг.2А примере приемник 18 ГСНС может перемещаться по замкнутому пространству 17 и получать соответствующие показания о своем местонахождении.
Другой вариант системы 10 показан на Фиг.2B. В этом варианте осуществления замкнутое пространство является полностью подземным, например, шахтой. Соответственно, все ИМУ являются внутренними имитирующими микроустройствами. Так как наружные ИМУ и действующее подключение к спутникам 12 отсутствуют, то этот тип системы называется "автономным". В этом варианте осуществления одно или несколько ИМУ являются опорными ИМУ - им предоставляется информация об их местонахождении. Следует отметить, что предоставленная им информация о местонахождении не обязательно является информацией об их истинном местонахождении. Оно может быть произвольной, и при этом система сохранит работоспособность, так как все другие ИМУ будут синхронизированы и должным образом соотнесены с опорным ИМУ. Показанная автономная система может работать с сохраненными или архивными (использовавшимися ранее) спутниковыми данными, которые предоставляются устройствам.
На практике системы ГСНС всегда находятся в движении, так как каждый наблюдаемый спутник передает непрерывный поток навигационных сообщений во время своего перемещения, и отдельные спутники постоянно входят в зону видимости и выходят из нее. Как будет более подробно описано ниже, система 10 по данному изобретению обладает способностью адаптироваться к этим и другими изменениями, или автоматически согласовываться с ними, так что она способна поддерживать полное и непрерывное навигационное покрытие в замкнутом пространстве 17. Такая адаптация включают в себя, например, регулировку/подстройку времени и/или выбора спутников и/или уровня мощности локальных сигналов 26 ГСНС и/или предоставление обновленных эфемерид наблюдаемых спутников.
Соответственно, специалисту будет понятно, что система 10 в соответствии с некоторыми вариантами осуществления данного изобретения добавляет пригодные для практических целей навигации навигационные сигналы и поддерживает полное непрерывное навигационное покрытие приемников ГСНС при таких условиях, когда сигналы ГСНС отсутствуют или непригодны для практического использования.
Фиг.3-5 иллюстрируют примеры вариантов конфигурации или применения системы 10 по данному изобретению.
На Фиг.3 показан (в разрезе) туннель 28, у которого есть крыша 29 и дорожное полотно 30 для перемещения пешеходов и транспортных средств, таких как автомобили 31. При обычных условиях в замкнутом пространстве 17 внутри туннеля 28 спутниковая навигация невозможна вследствие блокирования спутниковых сигналов 14 крышей 29. Как показано, система 10 может включать в себя два наружных имитирующих микроустройства 20, размещенных снаружи туннеля на обоих его концах, и группу внутренних имитирующих микроустройств 20 внутри туннеля. На Фиг.3 показаны три внутренних имитирующих микроустройства 20, однако понятно, что может быть установлено такое количество внутренних ИМУ 20, которое необходимо для обеспечения непрерывного навигационного покрытия на всем протяжении туннеля.
В этом примере используются два наружных имитирующих микроустройства 20, размещенных на входе и выходе на противоположных концах туннеля. Конфигурация системы 10 по данному изобретению предполагает, что один из наружных ИМУ будет с наружным Rx (т.е. тип этого устройства будет Rx-Снаружи-Тх-Внутри), а другой наружный ИМУ будет с наружным Тх (т.е. тип этого устройства будет Rx-Внутри-Тх-Снаружи). ИМУ с наружным Rx будет принимать спутниковые сигналы 14 от расположенных над ним спутников 12 и выполнять роль опорного ИМУ. Информация будет передаваться от этого ИМУ через внутренние имитирующие микроустройства до последнего устройства - наружного ИМУ 20 с наружным Тх. Несмотря на то, что последнее устройство, наружное ИМУ, не используется для приема спутниковых сигналов 14, его наружное размещение позволяет обеспечить "плавность" и непрерывность приема сигналов ГСНС при входе в туннель или при выходе из него.
На Фиг.3 внутренние имитирующие микроустройства показаны прикрепленными к крыше 29 туннеля. Так как туннель используется пешеходами и водителями, находящимися ближе к дорожному полотну 30, то в этой ситуации будет целесообразно настроить локальный сигнал 26 ГСНС так, чтобы он предусматривал расчетное местонахождение на дорожном полотне, ниже и со смещением относительно фактического расположения ИМУ 20 на крыше.
На Фиг.4 показан вид в перспективе одноэтажного здания 32 или отдельного этажа в здании. В этой конфигурации предусмотрены два наружных имитирующих микроустройства 20 и группа внутренних имитирующих микроустройств 20, охватывающих замкнутое пространство 17. В этом примере оба наружных ИМУ 20 могут быть выполнены с наружным Rx и принимать спутниковые сигналы 14.
В другом примере на Фиг.5 показан вид сбоку многоэтажного здания 33. Оно может представлять собой, например, офис или высотное жилое здание, торговый центр или гараж. Как показано, система 10 может быть выполнена с тремя наружными имитирующими микроустройствами 20 типа Rx-Снаружи-Тх-Внутри, размещенными на крыше этого здания. На каждом этаже может быть размещена группа внутренних имитирующих микроустройств 20, охватывающих внутреннее пространство помещения подобно тому, как показано на Фиг.4.
В целом, целесообразно размещать имитирующие микроустройства у каждого входа и/или выхода здания, и рядом с каждым магазином в случае, например, торгового центра. При наличии в здании препятствий, таких как опоры или колонны, для обеспечения непрерывного навигационного покрытия могут потребоваться дополнительные имитирующие микроустройства.
Фиг.6 является графическим представлением части системы 10, которое может использоваться для иллюстрации некоторых принципов работы изобретения. Как можно видеть, на фигуре показаны три имитирующие микроустройства, предположительно являющиеся частью значительно большей сети имитирующих микроустройств развернутой системы 10. Эти три ИМУ обозначены буквами "P", "Q" и "R", или же обозначениями ИМУ 20P, ИМУ 20Q и ИМУ 20R. ИМУ 20Q является внутренним ИМУ, а ИМУ 20P и ИМУ 20R могут быть или наружными, или внутренними ИМУ. Для определенности предполагается, что ИМУ 20P и ИМУ 20R представляют собой внутренние ИМУ.
Также эта графическая фигура показывает линии 22pq и 22qr связи, отображающие потоки информации или каналы передачи информации между соседними ИМУ P и Q, и Q и R, соответственно. Другие показанные линии связи 22 соединяют ИМУ P и R с другими не показанными на фигуре ИМУ. Предполагается, что потоки информации или последовательность ее прохождения через устройства направлены слева направо, т.е. от наружного ИМУ к ИМУ 20P, затем от ИМУ 20P к ИМУ 20Q, затем от ИМУ 20Q к ИМУ 20R, и затем от ИМУ 20R к наружному ИМУ.
Для того, чтобы отобразить эти три имитирующие микроустройства, образующие лишь часть системы 10, в контексте навигационной системы, на Фиг.6 также показана совокупность расположенных в небе двенадцати спутников, обозначенных номерами от 1 до 12. Также показано препятствие 34, которое представляет собой препятствие любого вида, блокирующее сигнал, например, крышу здания или образующий верхнюю часть туннеля слой земли. Таким образом, вся область на Фиг.6, расположенная ниже препятствия 34, представляет собой заблокированное замкнутое пространство 17.
Согласно некоторым вариантам осуществления изобретения показанные три имитирующие микроустройства, P, Q и R, как и другие имитирующие микроустройства данной системы, размещаются так, что они разнесены на по существу одинаковое расстояние друг от друга, обозначенное буквой "S". Соответственно, будет понятно, что количество имитирующих микроустройств, требуемых для охвата некоторого заданного пространства в достаточной мере, может определяться путем деления длины этого пространства на расстояние "S". В частности, хотя имитирующие микроустройства могут размещаться на любом удобном расстоянии друг от друга, по причинам, которые будут пояснены ниже, целесообразно предусматривать это расстояние в существенной степени одинаковым. На Фиг.6 из соображений ясности изображения упомянутые линии 22pq и 22qr связи также могут использоваться для представления расстояния между ИМУ. Соответственно, можно сказать, что линия 22pq представляет расстояние "S" между ИМУ 20Р и ИМУ 20Q, и подобным образом линия 22qr представляет расстояние "S" между ИМУ 20Q и ИМУ 20R.
Каждое ИМУ передает через свой передатчик Тх свой собственный локальный сигнал 26 ГСНС. Каждое ИМУ также принимает через свою принимающую антенну Rx локальный сигнал 26 ГСНС от соседнего ИМУ, которое является для этого ИМУ предшествующим в последовательности прохождения информации. В частности, ИМУ 20Р принимает или детектирует локальный сигнал ГСНС от ИМУ "слева" от него, которое не показано на этой фигуре, ИМУ 20Q принимает локальный сигнал 26 ГСНС, переданный имитирующим микроустройством 20Р, а ИМУ 20R принимает локальный сигнал 26 ГСНС, переданный имитирующим микроустройством 20Q. Работа с этими принятыми сигналами будет дополнительно описана ниже.
Можно отметить, что, поскольку локальные сигналы 26 ГСНС передаются на очень низком уровне мощности, то в соответствии с некоторыми вариантами осуществления изобретения для приема этих сигналов имитирующие микроустройства выполнены с приемниками Rx, которые обладают высоким уровнем чувствительности.
Как отмечалось, обмен имеющей отношение к синхронизации информацией между имитирующими микроустройствами, представленный на графических фигурах линией 22, может осуществляться множеством способов. В соответствии с некоторыми вариантами осуществления изобретения, обмен информацией может осуществляться через специализированную проводную локальную сеть. Такая сеть может включать в себя, например, сети на основе оптического волокна или медного провода.
Другой подход заключается в использовании беспроводных технологий связи. Преимущество такого подхода состоит в использовании уже имеющихся в наличии аппаратных средств, что может свести количество компонентов и затраты к минимуму. Существует несколько способов передачи информации между ИМУ в нелицензируемых диапазонах частот за пределами используемых ГСНС диапазонов частот, без создания взаимных помех между информационными сигналами и сигналами навигации. Один способ заключается в использовании множественного доступа с разделением частот, аналогичного используемому в беспроводной локальной сети WiFi. Другим способом является использование в имитирующих микроустройствах отдельных направленных передающих и принимающих антенн. Третий, менее предпочтительный способ заключается в использовании множественного доступа с разделением времени. В этом случае передача сымитированных спутниковых сигналов 26 периодически прерывается для того, чтобы позволить осуществить обмен информацией.
Другой способ предотвратить смешивание сигналов синхронизации с сигналами навигации использует то обстоятельство, что система GPS использует только 36 из 1023 возможных C/A кодов. Поскольку семь C/A кодов резервируются для спутниковых систем дифференциальной коррекции (известны специалистам как satellite-based augmentation system), остаются 980 C/A кодов, доступных для использования системой 10 для передачи другой информации. Так как C/A коды являются взаимно ортогональными, то приемник GPS будет игнорировать C/A коды, используемые для передачи имеющих отношение к синхронизации сигналов.
Приемники и передатчики, входящие в состав имитирующих микроустройств, могут быть адаптированы для использования с любым выбранным способом осуществления обмена имеющей отношение к синхронизации информацией. В соответствии с некоторыми вариантами осуществления изобретения, для того, чтобы обеспечить эффективный и непрерывный охват сигналами ГСНС замкнутого пространства 17, имитирующие микроустройства должны обеспечивать соблюдение определенных условий, касающихся уровня мощности передачи, выбора передаваемых спутников и синхронизации локальных сигналов ГСНС. Кроме того, должна предоставляться обновленная информация об эфемеридах наблюдаемых наружными имитирующими микроустройствами спутников. Подробное описание этих условий и процедур, которые используются для их соблюдения, приводится ниже.
Что касается требований к уровню мощности сигнала, в некоторых вариантах осуществления изобретения, с расстоянием "s" между соседними имитирующими микроустройствами, эффективная дальность передачи локального сигнала 26 ГСНС каждого имитирующего микроустройства должна составлять приблизительно 1,4 расстояния до срединной точки или около 0,7 расстояния "s".
Этот аспект системы 10 данного изобретения иллюстрируется с помощью Фиг.6. Срединная точка между ИМУ 20P и 20Q, и между 20Q и 20R, показана как "s/2". Дальность "r" передачи каждого имитирующего микроустройства показана для каждого ИМУ стрелкой "r" и пунктирной окружностью 36. Можно видеть, что дальность передачи, как представлено окружностями 36, простирается за срединную точку s/2 линий 22PQ и 22QR (графическая фигура изображена без сохранения масштаба). На Фиг.6 также показывается, как пересекаются соседние окружности 36, так что между смежными имитирующими микроустройствами определены области 37 перекрытия.
Теперь могут быть рассмотрены последствия такого выбора уровня мощности сигнала. При нахождении приемника 18 ГСНС в пределах дальности r передачи имитирующего микроустройства, но вне области перекрытия, преобладающим принятым сигналом будет локальный сигнал 26 ГСНС от этого имитирующего микроустройства. Например, расположенный на Фиг.6 в точке T1 приемник 18 будет принимать сильный локальный сигнал 26 ГСНС от ИМУ 20Р, так как он находится в пределах дальности передачи ИМУ 20Р. Локальный сигнал 26 ГСНС от ИМУ 20Q будет относительно слабым, так как точка T1 находится за пределами дальности передачи ИМУ 20Q. Аналогично, в точках T2 и T3 упомянутый приемник в основном будет принимать локальные сигналы 26 ГСНС от ИМУ 20Q и ИМУ 20R соответственно. Следовательно, в точках T1, T2 и Т3 приемник 18 ГСНС будет вычислять и выдавать информацию о местонахождении, которая соответствует местонахождению ИМУ 20Р, ИМУ 20Q и ИМУ 20R соответственно (или информацию о расчетных местонахождениях, соответствующих этим местонахождениям).
При нахождении приемника 18 ГСНС в областях 37 перекрытия, например, в точках T4 и Т5 на Фиг.6, этот приемник будет принимать два локальных сигнала 26 ГСНС. В этой ситуации приемник ГСНС будет вычислять свое местонахождение как расположенное посередине между этими двумя ИМУ, или приблизительно в срединной точке s/2. Соответственно, будет понятно, что разрешающая способность системы 10 данного изобретения составляет приблизительно половину расстояния между соседними имитирующими микроустройствами, или приблизительно половину величины s. Например, если расстояние "s" между имитирующими микроустройствами в конкретном варианте осуществления составляет 50 метров, то разрешающая способность определения местонахождения будет составлять 25 метров. Также будет понятно, что такая конфигурация позволяет определять изменение местонахождения относительно плавно, с шагом s/2 вместо шага "s".
Еще одним аспектом системы 10 данного изобретения является выбор спутников, сигналы которых должны передаваться как сымитированные сигналы ГСНС каждым ИМУ. Как отмечалось, рассматриваемая в качестве примера конфигурация (Фиг.6) включает в себя двенадцать спутников, Sat-1-Sat-12, которые обычно наблюдаемы в небе над препятствием 34, в определенный момент времени. Эти спутники становятся известны системе посредством прямого приема спутникового сигнала 14 одним или несколькими связанными наружными имитирующими микроустройствами, и/или из информации, предоставленной альманахом, который передается всеми спутниками. В соответствии с некоторыми вариантами осуществления изобретения альманах и эфемериды также могут быть получены системой с использованием средств, отличных от спутниковых сигналов, таких как Интернет или другой внешний источник.
В соответствии с некоторыми вариантами осуществления изобретения система 10 предпочтительно выполнена таким образом, что каждое имитирующее микроустройство передает сигналы множества спутников, отличных от спутников, сигналы которых передаются соседними имитирующими микроустройствами. Как показано на Фиг.6, локальный сигнал 26 ГСНС имитирующего микроустройства 20P передает сигналы, соответствующие спутникам 2, 5, 7 и 12. ИМУ 20Q передает сигналы от спутников с номерами 1, 4, 8 и 9, и ИМУ 20R передает сигналы от спутников с номерами 2, 6, 7 и 11. Следовательно, сигналы соседних ИМУ 20Р и ИМУ 20Q (т.е. 2, 5, 7, 12 и 1, 4, 8, 9) и ИМУ 20Q и ИМУ 20R (т.е. 1, 4, 8, 9 и 2, 6, 7, 11) не имеют общих спутниковых сигналов. Хотя сигналы спутников 2 и 7 используются обоими ИМУ 20Р и 20R, это допустимо, поскольку ИМУ 20P и ИМУ 20R не являются соседними.
Преимущество передачи соседними имитирующими микроустройствами сигналов от разных множеств спутников заключается в том, что такой способ передачи снижает риск совершения ошибки приемником ГСНС. Например, предположим, что ИМУ 20Q передает сигналы спутников 1, 5, 8, 9 вместо спутников 1, 4, 8, 9, так что сигналы спутника 5 теперь являются общими для ИМУ 20Q и ИМУ 20Р. Приемник, например, в точке T4 в области 37 перекрытия будет принимать сигналы спутника 5 в двух локальных сигналах ГСНС, передаваемых имитирующими микроустройствами 20P и 20Q. Так как сигналы спутника 5 исходит из разных источников, это может привести к неточностям и возможной ошибке в работе приемника, обычно связанной с тем, что принимаемый сигнал может проходить от передатчика к приемнику по нескольким различным маршрутам. Ошибки также могут случаться даже за пределами областей перекрытия, например, в точках T1 или T2. где приемник будет принимать от разных источников сильный сигнал спутника 5 и более слабый сигнал спутника 5 по различным маршрутам. Возникновения таких проблем можно избежать, если выбрать для передачи соседними имитирующими микроустройствами сигналы от различных спутников.
Согласно некоторым вариантам осуществления изобретения, если соседние имитирующие микроустройства по какой-либо причине должны передавать сигнал одного и того же спутника, то эти ИМУ могут быть выполнены с возможностью снижения уровня мощности канала, по которому передается сигнал общего спутника, тем самым снижая описанный выше риск неточности или ошибки.
Для того, чтобы обеспечить распределение спутниковых сигналов должным образом, каждое имитирующее микроустройство обменивается информацией о выбранных им спутниках с соседним имитирующим микроустройством. Например, ИМУ 20P сообщает ИМУ 20Q о том, что ИМУ 20Р использует спутники 2, 5, 7 и 12. Алгоритмы самосогласования в ИМУ 20Q используют эту информацию для выбора множества из четырех других спутников, такого как 1, 4, 8 и 9.
Можно также отметить, что в случае необходимости лишь горизонтальной навигации, например, внутри туннеля, как показано на Фиг.3, каждому имитирующему микроустройству будет необходимо имитировать сигналы всего трех спутников вместо сигналов четырех спутников.
В локальных сигналах 26 ГСНС каждая передача спутниковых сигналов содержит данные о моменте времени передачи "t". Данные о моменте времени передачи являются частью информации, используемой приемником 18 ГСНС для вычисления местонахождения, т.е. местонахождения передающего ИМУ или расчетного местонахождения, характеризующееся смещением по отношению к передающему ИМУ. Для того, чтобы обеспечивать точную и плавную навигацию, имитирующие микроустройства в системе 10 должны быть синхронизированы между собой. Как отмечалось выше, при наличии в системе действующего соединения имитирующие микроустройства также могли бы быть синхронизированы с часами спутников 12.
В соответствии с некоторыми вариантами осуществления изобретения синхронизация может обеспечиваться с помощью выбора наружного ИМУ 20 в качестве опорного ИМУ для синхронизации. Наружное ИМУ 20 представляет собой ИМУ типа Rx-Снаружи-Тх-Внутри, и поэтому напрямую принимает спутниковые сигналы 14 ГСНС и вычисляет свое смещение dT времени относительно часов спутника. Наружное ИМУ 20 передает свой собственный набор из четырех или более сымитированных спутниковых сигналов, повторяя полученные от спутников сигналы или имитируя эти сигналы тем же способом, что и внутренние ИМУ 20. Наружное ИМУ 20 также использует канал 22 связи для пересылки своего смещения времени относительно часов спутника GPS соседнему внутреннему ИМУ 20.
Внутреннее ИМУ 20 принимает на своем приемнике Rx сымитированные спутниковые сигналы от наружного ИМУ 20 и использует информацию этих сигналов для вычисления местонахождения. Вычисленное местонахождение представляет собой лишь местонахождение наружного ИМУ 20, но побочным результатом этого вычисления является смещение времени между часами наружного ИМУ 20 и внутреннего ИМУ 20.
Этот процесс последовательно продолжается, по мере того как каждое следующее внутреннее ИМУ 20 принимает локальные сигналы 26 ГСНС от своего соседнего внутреннего ИМУ 20 (например, от ИМУ, находящегося непосредственно слева от данного ИМУ, как изображено на Фиг.1) и использует эти сигналы для вычисления своего смещения времени относительно этого соседнего внутреннего ИМУ 20. Затем каждое внутреннее ИМУ 20 передает по линии 22 связи суммарное смещение времени, т.е. общее смещение времени в этой точке относительно наружного ИМУ 20, следующему в последовательности (т.е. находящемуся "справа") соседнему ИМУ 20. В примере с Фиг.6 ИМУ 20Q принимает локальный сигнал 26 ГСНС от ИМУ 20Р и использует эту информацию для определения своего времени смещения относительно ИМУ 20Р. Таким же способом все внутренние ИМУ 20 в итоге получат свои соответствующие значения смещения времени относительно опорного наружного ИМУ 20 и, таким образом, становятся синхронизированными с часами спутников GPS.
Как отмечалось, для того, чтобы добиться согласованности настроек времени различных устройств в системе 10, в качестве опорного ИМУ для синхронизации может использоваться любое имитирующее микроустройство 20. Приемник 18 GPS, находящийся внутри замкнутого пространства 10, осуществляет навигацию в соответствии со временем, используемым в системе 10, а не временем спутников GPS. Тем не менее, предпочтительно система 10 синхронизируется с часами спутников GPS как описано выше, посредством использования наружного ИМУ 20 в качестве опорного ИМУ для синхронизации, для того чтобы обеспечить плавность обслуживания приемника 18 GPS при входе в замкнутое пространство 17 и при выходе из него. В системах 10, синхронизированных с опорным ИМУ, которое не синхронизировано с часами спутников, вероятно, будет наблюдаться потеря приемниками GPS информации о местонахождении, по крайней мере на короткое время, при входе в замкнутое пространство 17 и при выходе из него. Можно также отметить, что в принципе внутренние имитирующие микроустройства могут быть синхронизированы, каждый в отдельности или все вместе, с помощью проводных подключений к общим часам, которые в свою очередь синхронизируются с часами спутников GPS, однако такой вариант менее предпочтителен, чем синхронизация с использованием наружного ИМУ 20, как описано выше.
Для того, чтобы внутреннее ИМУ 20 передавало сымитированные спутниковые сигналы 26, соответствующие расчетному местонахождению, это ИМУ должно обладать информацией об эфемеридах спутников, сигналы которых имитируются. Значения этих эфемерид могли бы быть получены с использованием Интернет или посредством телекоммуникационного соединения. Альтернативно, эфемериды могут быть получены от наружного ИМУ 20, которое может принимать эфемериды всех наблюдаемых спутников посредством приема сигналов 14, передаваемых спутниками ГСНС, и затем передавать эти значения по каналу 22 связи внутренним ИМУ системы. Таким образом, периодически передавая значения эфемерид, наружное ИМУ 20 обновляет эфемериды, используемые внутренними ИМУ 20, и гарантирует, что внутренние ИМУ 20 имитируют сигналы только наблюдаемых в данное время спутников.
Теперь может быть рассмотрено работа данного изобретения в соответствии с некоторым вариантам осуществления. Сначала опорное наружное ИМУ 20 принимает сигналы 14, передаваемые спутниками ГСНС, и использует их для получения смещения dT времени относительно часов спутников GPS и эфемерид наблюдаемых спутников. Факультативно может быть получен альманах, который помог бы ИМУ прогнозировать появление в зоне наблюдения других спутников. Наружное ИМУ выбирает четыре спутника и уровень мощности для передачи сигналов в замкнутом пространстве и сообщает соседнему внутреннему ИМУ смещение dT времени относительно часов спутников, эфемериды всех спутников 1-12, выбранные им спутники и свой уровень мощности передачи.
В соответствии с некоторыми вариантами осуществления изобретения предусмотрен способ самосогласования, обозначенный для удобства как способ "А", который описывается с помощью блок-схемы, приведенной на Фиг.7А. В этом способе для синхронизации времени между имитирующими микроустройствами используется внешний (проводной или беспроводной) канал 22 связи. Локальный сигнал 26 ГСНС служит для измерения задержки между различными ИМУ и может использоваться для определения местонахождения ИМУ. Для функционирования этой системы необходимо такое количество ИМУ опорной синхронизации, сколько в этой системе используется измерений (т.е. одно опорное устройство на одно измерение), и каждое ИМУ должно соединяться с количеством соседних ИМУ, равным количеству измерений в системе.
Блок-схема на Фиг.7А представляет способ А самосогласования в соответствии с некоторыми вариантами осуществления изобретения. После начала выполнения способа в модуле 42 ИМУ принимает локальный сигнал 26 ГСНС от соседнего ИМУ. На основании принятого сигнала в модуле 44 ИМУ вычисляет свое смещение dT1 времени относительно часов соседнего ИМУ. В модуле 46 внутреннее ИМУ получает от соседнего ИМУ информацию, сообщающую суммарное смещение dTn времени, системное время, выбранные спутники, факультативно - уровень мощности передачи, и эфемериды всех спутников 1-12. Упомянутое системное время представляет собой синхронизированное время в данной системе, которое обеспечивается опорным ИМУ. В модуле 48 внутреннее ИМУ определяет смещение времени относительно часов спутников GPS, dTnew=dT1+dTn. В модуле 50 ИМУ выбирает четыре спутника для локальной передачи, причем эти спутники отличны от спутников, которые используются соседним ИМУ. В модуле 52 ИМУ определяет уровень мощности (дБм) и параметры времени для передачи локальных сигналов 26 ГСНС. В модуле 53 ИМУ определяет свое местонахождение, используя описанную выше информацию.
В модуле 54 ИМУ, используя dTnew для определения соответствующего момента времени передачи и определенный в модуле 52 уровень мощности передачи, передает локальный сигнал 26 ГСНС, имитирующий сигналы выбранных спутников. Этот сигнал включает в себя информацию времени и эфемериды четырех выбранных спутников. В частности, ИМУ вычисляет параметры локального сигнала 26 ГСНС. ИМУ вычисляет, какое время "t" использовать для каждого канала, так что, используя эфемериды, сигнал ГСНС дает местонахождение, которое ИМУ предназначает для получения приемником, т.е. координаты местонахождения ИМУ или расчетное местонахождение, связанное с местонахождением ИМУ.
В модуле 56 внутреннее ИМУ высылает следующему в последовательности ИМУ информацию о суммарном смещении dTnew времени, системном времени, выборе спутников, факультативно - свой уровень мощности передачи, и эфемериды всех спутников. Затем управление передается от модуля 58 к начальному модулю и цикл повторяется. Такая же процедура выполняется всеми остальными имитирующими микроустройствами в системе 10.
В соответствии с некоторыми вариантами осуществления изобретения предусматривается вариант самосогласования, названный для удобства изложения способом "В". В этом способе канал 22 связи использует коды C/A системы GPS, как описано выше. Локальный сигнал 26 ГСНС используется для синхронизации системного времени, а канал 22 связи используется для измерения задержки или расстояния между станциями ИМУ. Подобно способу "А", в этом случае для функционирования системы необходимо такое количество ИМУ опорной синхронизации, сколько в этой системе используется измерений (т.е. одно опорное устройство на одно измерение), и каждое ИМУ должно соединяться с количеством соседних ИМУ, равным количеству измерений системы.
Обращаясь к блок-схеме на Фиг.7B, в модуле 60 ИМУ принимает локальный сигнал 26 ГСНС от соседнего ИМУ. В модуле 62 ИМУ вычисляет системное время на основании полученного от соседнего ИМУ сигнала. В модуле 64 ИМУ получает по каналу связи от соседнего ИМУ: информацию о выборе спутников соседним ИМУ, факультативно - уровень мощности передачи соседнего ИМУ, и эфемериды всех наблюдаемых спутников. В модуле 66 ИМУ вычисляет смещение времени относительно соседнего ИМУ. В модуле 68 ИМУ выбирает спутники для передачи имитированного сигнала. В модуле 70 ИМУ определяет уровень мощности передачи и параметры времени локального сигнала 26 ГСНС. В модуле 72 ИМУ определяет свое местонахождение. В модуле 74 ИМУ передает локальный сигнал 26 ГСНС, имитирующий сигналы выбранных спутников. В модуле 76 ИМУ высылает по каналу связи следующему ИМУ: информацию о своем выборе спутников, факультативно - свой уровень мощности передачи, и эфемериды всех наблюдаемых спутников. В модуле 58 управление передается в начальный модуль и цикл повторяется.
Другой аспект согласования уровня мощности передачи в системе 10 данного изобретения состоит в том, что, если уровень мощности передачи отдельного ИМУ слишком высокий, то смежное ИМУ может обнаружить это и переслать сообщение - снизить уровень мощности передачи. Например, на Фиг.6, если уровень мощности передачи ИМУ 20Q становится слишком высоким, то есть окружность 36Q увеличивается и приближается слишком близко к ИМУ 20P и ИМУ 20R, то ИМУ 20P и/или ИМУ 20R могут обмениваться информацией с ИМУ 20Q по каналу 22 связи, с тем чтобы снизить уровень мощности передачи этого ИМУ. В соответствии с некоторыми вариантами осуществления изобретения выявление уровня мощности передачи может осуществляться в процессе приема локальных сигналов 26 ГСНС. В соответствии с другими вариантами осуществления изобретения выявление уровня мощности передачи может осуществляться с помощью сообщения информации об уровне мощности по каналу 22 связи.
Будет понятно, что описанным выше способом посредством алгоритмов самосогласования вычисляют, регулируют и устанавливают уровни мощности и параметры времени передаваемых локальных сигналов 26 ГСНС, а также выбирают спутники, имитированные сигналы которых должны передаваться. Соответственно, каждое имитирующее микроустройство динамически управляется посредством этих алгоритмов.
Фиг.8 иллюстрирует эффект от использования системы 10 по данному изобретению на примере ИМУ 20Q с Фиг.6. Как можно видеть, эффект от использования системы 10 такой же, как если бы препятствие 34 было убрано и отсутствовало, так что выбранные спутники 1, 4, 8 и 9 свободно передают свои сигналы 14 для их приема в ИМУ 20Q. Эти сигналы, содержащие C/A коды и момент времени "t" передачи для каждого канала, а также эфемериды, ретранслируются или имитируются с низким уровнем мощности, как показано пунктирной стрелкой 38, так что приемник 18 ГСНС, находящийся в пределах досягаемости локального сигнала 26 имитирующего микроустройства 20Q, принимает этот сигнал так, как если бы он имел местонахождение Q ("posQ"). Соответственно, локальный сигнал 26 является совместимым с передаваемыми спутниковыми сигналами 14.
На Фиг.2А расположение устройств ИМУ является линейным или одномерным. В случае двумерных или трехмерных схем расположения ИМУ используется большее количество опорных ИМУ. В частности, для двумерных схем расположения используются по меньшей мере два опорных ИМУ, а для трехмерных схем расположения используются по меньшей мере три опорных ИМУ. В этих случаях местонахождение каждого ИМУ определяется с помощью процесса триангуляции, основанного на измерении задержек прохождения двустороннего сигнала между имитирующими микроустройствами. Этот процесс в качестве входной информации использует задержки прохождения сигнала между наружными ИМУ и соседними внутренними ИМУ, и учитывает фиксированные и известные задержки внутри имитирующих микроустройств при реагировании на принимаемые сигналы триангуляции. В отличие от этого, местонахождение ИМУ при их линейном расположении, как в случае с Фиг.2A, определяется обычными способами измерения на местности.
Триангуляция дополнительно поясняется с использованием Фиг.9А-9С и примеров с Фиг.3-5. На Фиг.9A показано ИМУ 20, получающее значение смещения dT времени относительно единственного соседнего опорного имитирующего микроустройства. Расстояние от этого опорного имитирующего микроустройства до ИМУ 20 показано стрелкой "w". Можно увидеть, что ИМУ 20 может перемещаться вдоль дуги 39, радиус которой равен "w". В любом положении на этой дуге расстояние до опорного ИМУ будет одинаковым, так что значение смещения dT времени также будет одним и тем же. Смещение времени будет оставаться тем же самым даже при перемещении ИМУ 20 в двумерном пространстве. Соответственно, получение значения смещения времени относительно одного опорного устройства не будет достаточно для определения местонахождения ИМУ 20 в двумерном пространстве.
Эта проблема может быть решена с помощью использования двух опорных имитирующих микроустройств, как показано на Фиг.9 В. Расстояние до каждого опорного ИМУ обозначено стрелками "w" и "v". В этом случае, при перемещении ИМУ 20 в плоскости по меньшей мере одно из опорных расстояний также будет изменяться, т.е. каждому положению ИМУ 20 в двумерном пространстве будут соответствовать уникальное сочетание значений "w" и "v". Аналогично, используя тот же принцип, для определения местонахождения ИМУ 20 в трехмерном пространстве должны использоваться три опорных имитирующих микроустройства, как показано на Фиг.9С.
Обращаясь теперь к примерам, показанным на Фиг.3-5, можно видеть, что в случае туннеля с Фиг.3 единственное существенное перемещение, которое может иметь место в туннеле - это продвижение вдоль прямой дороги 30. Следовательно, для этого варианта применения должно быть достаточно использования одного-единственного опорного ИМУ. Расположенное слева наружное ИМУ 20 могло бы быть опорным ИМУ, а соседнее внутреннее ИМУ 20 m1 могло бы синхронизироваться с ним, затем ИМУ 20 m2 синхронизировалось бы с ИМУ 20 m1 и т.д.
В случае этажа или комнаты с Фиг.4 перемещение будет происходить в двух измерениях, но, вероятно, не в трех (т.е. не будет перемещения вверх-вниз). Следовательно, важно добиться синхронизации в двух измерениях. Два наружных имитирующих микроустройства могли бы быть опорными ИМУ, или одно наружное и одно внутреннее, для того, чтобы поддерживать действующее соединение. Например, синхронизация может происходить следующим образом: внутреннее ИМУ 20 k1 синхронизируется с двумя наружными ИМУ. Затем внутреннее ИМУ 20 k2 синхронизируется с одним из наружных ИМУ и с внутренним ИМУ 20 k1. Затем внутреннее ИМУ 20кЗ синхронизируется со внутренними ИМУ 20 k1 и 20 k2, и т.д.
Такой же процесс применяется в случае нескольких этажей в примере с Фиг.5. В этом примере перемещение происходит во всех трех измерениях, включая перемещение вверх и вниз. Следовательно, для синхронизации необходимы три опорных имитирующих микроустройства. Ими могут быть, например, три наружных имитирующих микроустройства. Процесс синхронизации может происходить следующим образом: внутреннее ИМУ 20 d1 синхронизируется с тремя наружными ИМУ. Затем внутреннее ИМУ 20 d2 синхронизируется с двумя из наружных ИМУ и с внутренним ИМУ 20 d1. Затем внутреннее ИМУ 20 d3 синхронизируется с одним из наружных ИМУ и с внутренними ИМУ 20 d1 и 20 d2. Затем внутреннее ИМУ 20 d4 синхронизируется с тремя внутренними ИМУ 20 d1, 20 d2 и 20 d3.
На Фиг.10А и Фиг.10B показаны функциональные схемы соответственно наружного и внутреннего имитирующих микроустройств в соответствии с некоторыми вариантами осуществления изобретения.
Как показано, наружное ИМУ имеет один-единственный приемник Rx для приема сигналов ГСНС от спутников ГСНС. Эта информация обрабатывается модулем обработки/управления самосогласованием и затем модулем управления "интерфейс наружное-внутреннее", после чего передается в виде локального сигнала ГСНС с помощью передатчика Тх.
Теперь могут быть рассмотрены некоторые из преимуществ системы 10 данного изобретения.
При действующем соединении эта система обеспечивает непосредственное (в реальном времени) получение информации, на основе взаимодействия с реальными спутниками, находящимися в небе. Тем самым обеспечивается динамически изменяющаяся инфраструктура, которая самостоятельно адаптируется и переносит передаваемые сигналы ГСНС в замкнутое пространство. Каждое имитирующее микроустройство автоматически определяет свое местонахождение относительно своих соседей, представляющих собой другие имитирующие микроустройства, реализующие алгоритмы самосогласования, осуществляет самонастройку и должным образом передает требуемый сигнал.
Поскольку данная система передает спутниковые сигналы ГСНС, которые содержат ту же информацию и передаются на той же частоте, что и передаваемые спутниками сигналы, то могут использоваться обычные приемники ГСНС. В частности, не требуется модифицировать аппаратные компоненты или встроенное программное обеспечение этих приемников. Также нет необходимости в особых "режимах" работы приемника или в конфигурировании приемника для того, чтобы сделать возможным использование им дополнительной информации.
При осуществлении синхронизации с часами спутников GPS, как, например, при использовании наружного ИМУ, система 10 обеспечивает пользователю возможность входа в замкнутое пространство 17 и выхода за его пределы без прерывания обслуживания, без нарушений в процессе обслуживания. В пределах замкнутых пространств 17 система 10 обеспечивает полное и непрерывное навигационное покрытие независимо от того, осуществляется ли синхронизация с часами спутников GPS или же только между имитирующими микроустройствами этой системы.
Так как каждый локальный сигнал 26 ГСНС доставляет сымитированные сигналы четырех спутников, отсутствует проблема, связанная с тем, что сигнал может поступать к приемнику по нескольким различным маршрутам, так как все четыре спутниковых сигнала попадают в приемник одним и тем же путем.
Полное покрытие легко может быть обеспечено в замкнутом пространстве 17 путем использования имитирующих микроустройств в количестве, достаточном для покрытия этого пространства.
Это изобретение делает возможной непрерывную навигацию в пространствах, где ранее было невозможно принимать спутниковые сигналы, или где эти сигналы были слишком слабы для обработки обычными приемниками ГСНС. В соответствии с изобретением, в замкнутом пространстве размещаются имитирующие микроустройства, в которых объединены приемники ГСНС и передатчики ГСНС, так чтобы наилучшим образом обеспечить покрытие этого замкнутого пространства.
Работа с ГСНС-подобными сигналами (обработка сигналов), которые генерируются инфраструктурой, предлагаемой в соответствии с настоящим изобретением, осуществляется с использованием алгоритмов самосогласования, обеспечивающими синхронизацию с сигналами от реальных спутников.
Хотя были показаны и описаны отдельные варианты осуществления данного изобретения, следует понимать, что данное изобретение не ограничено этими раскрытыми вариантами осуществления. Напротив, следует понимать, что раскрытые варианты осуществления могут быть модифицированы без отхода от основных принципов и сущности данного изобретения, объем которого определяется формулой изобретения и эквивалентами.
Изобретение относится к технике навигации. Технический результат состоит в повышении точности определения координат. Для этого навигационная система для замкнутого пространства включает в себя: а) по меньшей мере одну станцию приема спутниковых сигналов, расположенную за пределами замкнутого пространства, предназначенную для приема спутниковых сигналов, передаваемых совокупностью спутников, и определения соответствующей передаваемым сигналам информации, имеющей отношение к синхронизации времени; b) по меньшей мере одну локальную передающую станцию, расположенную в пределах данного замкнутого пространства, предназначенную для передачи локального сигнала, совместимого с передаваемыми спутниковыми сигналами; и с) канал связи, предназначенный для передачи информации, имеющей отношение к самосогласованию, между каждой из станций и по меньшей мере одной другой станцией; причем каждая локальная передающая станция использует информацию, имеющую отношение к самосогласованию, для формирования упомянутого локального сигнала; и причем по меньшей мере один локальный сигнал предоставляет навигационную информацию, пригодную к использованию приемником спутниковой навигационной системы. 18 з.п. ф-лы, 15 ил. 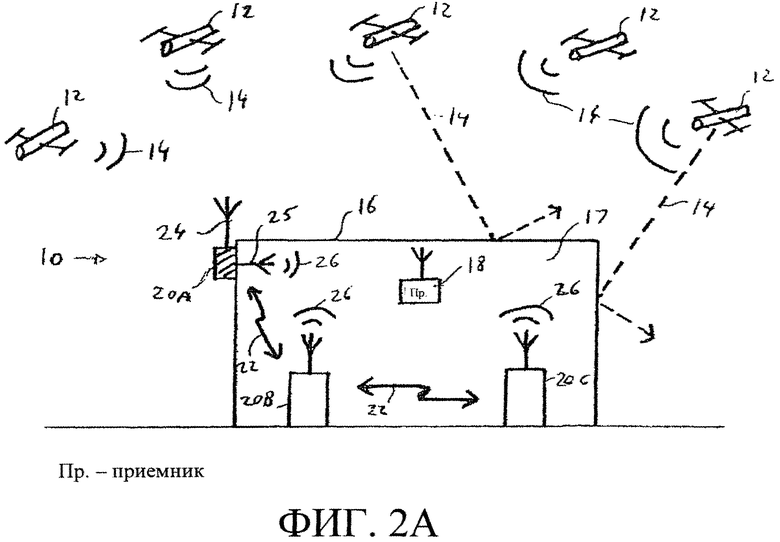
1. Система для поддержки возможностей навигации в замкнутом пространстве, включающая в себя:
по меньшей мере три разнесенных на некоторое расстояние друг от друга имитирующих микроустройства, каждое из которых выполнено с возможностью передачи локального сигнала глобальной спутниковой навигационной системы (ГСНС), с использованием по меньшей мере трех сигналов спутников ГСНС от по меньшей мере трех спутников ГСНС, который характеризует соответствующее отличное от других местонахождение, связанное с одним из упомянутых имитирующих микроустройств, причем упомянутые имитирующие микроустройства включают в себя:
первое имитирующее микроустройство, задающее опорное имитирующее микроустройство;
второе имитирующее микроустройство, синхронизированное с упомянутым первым имитирующим микроустройством непосредственно;
третье имитирующее микроустройство, синхронизированное с упомянутым первым имитирующим микроустройством опосредованно вследствие того, что является синхронизированным с упомянутым вторым имитирующим микроустройством непосредственно; причем
по меньшей мере упомянутые второе и третье имитирующие микроустройства расположены в упомянутом замкнутом пространстве.
2. Система по п. 1, отличающаяся тем, что упомянутое второе имитирующее микроустройство выполнено с возможностью синхронизации с упомянутым опорным имитирующим микроустройством путем определения смещения времени между часами упомянутого опорного имитирующего микроустройства и часами упомянутого второго имитирующего микроустройства, и при этом упомянутое третье имитирующее микроустройство выполнено с возможностью синхронизации с упомянутым опорным имитирующим
микроустройством путем определения смещения времени между упомянутыми часами упомянутого второго имитирующего микроустройства и часами упомянутого третьего имитирующего микроустройства.
3. Система по п. 1, отличающаяся тем, что упомянутое опорное имитирующее микроустройство находится за пределами данного замкнутого пространства и принимает сигналы спутников ГСНС, определяющие совокупность спутников ГСНС.
4. Система по п. 1, отличающаяся тем, что упомянутое опорное имитирующее микроустройство находится в пределах данного замкнутого пространства.
5. Система по п. 1, отличающаяся тем, что упомянутый локальный сигнал ГСНС каждого имитирующего микроустройства имитирует сигналы, которые могли бы быть получены от по меньшей мере трех спутников ГСНС, через упомянутое опорное имитирующее микроустройство.
6. Система по п. 5, отличающаяся тем, что упомянутое модифицирование включает, для каждого упомянутого имитирующего микроустройства, линейные преобразования соответствующих векторов разности расстояний до упомянутых спутников ГСНС.
7. Система по п. 5, отличающаяся тем, что упомянутое модифицирование включает, для каждого упомянутого имитирующего микроустройства, нелинейные преобразования соответствующих векторов разности расстояний до упомянутых спутников ГСНС.
8. Система по п. 1, отличающаяся тем, что, для по меньшей мере одного упомянутого имитирующего микроустройства, упомянутое соответствующее местонахождение, которое связано с по меньшей мере одним из упомянутых имитирующих микроустройств, представляет собой местонахождение данного имитирующего микроустройства.
9. Система по п. 1, отличающаяся тем, что, для по меньшей мере одного упомянутого имитирующего микроустройства, упомянутое соответствующее местонахождение, которое связано с по меньшей мере одним из упомянутых
имитирующих микроустройств, смещено от местонахождения данного имитирующего микроустройства на заранее заданное смещение.
10. Система по п. 1, дополнительно включающая в себя: канал связи, предназначенный для облегчения обмена информацией между упомянутыми имитирующими микроустройствами.
11. Система по п. 10, отличающаяся тем, что упомянутая информация включает в себя информацию об уровнях мощности локальных сигналов.
12. Система по п. 1, отличающаяся тем, что упомянутая информация включает в себя, для каждого упомянутого имитирующего микроустройства, информацию для идентификации каждого из по меньшей мере одного спутника ГСНС, чьи сигналы имитируются соответствующим имитирующим микроустройством.
13. Система по п. 12, отличающаяся тем, что каждый упомянутый локальный сигнал ГСНС содержит имитированные сигналы по меньшей мере трех спутников ГСНС, и при этом каждое упомянутое имитирующее микроустройство выполнено с возможностью выбора спутников ГСНС для упомянутой имитации, отличных от спутников ГСНС, чьи сигналы имитируются любым из соседних имитирующих микроустройств.
14. Система по п. 13, отличающаяся тем, что имитирующие микроустройства из каждых двух соседних имитирующих микроустройств разнесены на соответствующее расстояние,
причем дальность передачи локальных сигналов ГСНС составляет от приблизительно половины этого расстояния до приблизительно упомянутого расстояния.
15. Система по п. 14, отличающаяся тем, что упомянутая дальность передачи упомянутых локальных сигналов ГСНС составляет приблизительно 0,7 упомянутого расстояния.
16. Система по п. 10, отличающаяся тем, что упомянутый канал связи является беспроводным.
17. Система по п. 16, отличающаяся тем, что упомянутый канал связи включает в себя неиспользуемые каналы спутниковой навигации.
18. Система по п. 10, отличающаяся тем, что упомянутый канал связи включает в себя проводное соединение между соседними имитирующими микроустройствами.
19. Система по п. 10, отличающаяся тем, что упомянутая информация модулирована С/А кодами, отличными от С/А кодов, которые используются в упомянутых локальных сигналах ГСНС.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Механизм к шапочной швейной машине для движения подающей материал гребенки | 1933 |
|
SU36147A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US7342538 B2, 11.03.2008 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

