УРОВЕНЬ ТЕХНИКИ
Изобретение относится к передатчикам переменных параметров процесса, используемым в системах мониторинга и управления процессом. Более конкретно, настоящее изобретение относится к использованию компонента, встроенного в передатчик, для обнаружения ухудшения характеристик или отказа датчика.
Передатчики переменных параметров процесса используются, чтобы измерять параметры процесса в системе мониторинга и управления процессом. Микропроцессорные передатчики зачастую включают в себя датчик, аналого-цифровой преобразователь для преобразования выходного сигнала от датчика в цифровую форму, микропроцессор для компенсации оцифрованного выходного сигнала и схему вывода для передачи компенсированного выходного сигнала. В настоящее время эта передача обычно выполняется через контур управления процессом, такой как 4-20 миллиамперный контур управления, или беспроводным образом.
Такие передатчики переменных параметров процесса зачастую соединены с основной системой посредством контура управления процессом. Некоторые существующие основные системы используют статистику, называемую статистикой стандартной ошибки оценки (Se), для того, чтобы анализировать данные измерений, чтобы прогнозировать, отказывают ли датчики или другие компоненты процесса, прежде чем такие отказы становятся критичными. Например, некоторые такие основные системы используют Se-статистику, чтобы определять, ухудшились ли характеристики одного из датчиков (такого как термопара), но он еще не отказал. Другие основные системы используют Se-статистику для идентификации определенных отказов в процессе (такие как выход реактора из-под контроля), прежде чем произойдет серьезное повреждение. Чтобы обеспечить этот тип информации с достаточной точностью, обычное Se-уравнение должно обновляться по меньшей мере раз в секунду или чаще.
Более конкретно, Se-статистика используется для определения среднего квадратичного отклонения сигнала датчика относительно области линеаризации. Это помогает идентифицировать то, насколько хорошо данные линеаризованы, или насколько хорошо отслеживается линеаризация. Один пример уравнений, используемых для этой статистики, показан ниже:
 Уравнение 1
Уравнение 1
 Уравнение 2
Уравнение 2
 Уравнение 3
Уравнение 3
 Уравнение 4
Уравнение 4
где n - число выборок (обычно 12-20);
i - номер выборки (от 1 до n);
 - n средних входных значений;
- n средних входных значений;
 - вычисленное входное значение;
- вычисленное входное значение;
 - выбранные входные значения;
- выбранные входные значения;
t - время обновления;
 - стандартная ошибка оценки.
- стандартная ошибка оценки.
Эти уравнения являются ресурсоемкими для систем с встроенным микроконтроллером, используемых во многих передатчиках процесса. Они требуют относительно большого объема оперативного запоминающего устройства для каждого анализируемого датчика. Решение уравнений является также довольно затратным по времени, и это может уменьшать интервал времени, который доступен для обработки обычного сигнала измерения, вводимого посредством датчика.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Передатчик переменных параметров процесса включает в себя память, которая хранит отфильтрованное значение датчика, которое вычислено на основании предыдущего принятого значения датчика, и отфильтрованное значение скорости изменения, которое вычислено на основании предыдущего значения скорости изменения. Передатчик переменных параметров процесса также включает в себя контроллер, который принимает значение датчика и сравнивает его с отфильтрованным значением датчика, чтобы получать значение скорости изменения. Контроллер также сравнивает значение скорости изменения с отфильтрованным значением скорости изменения, чтобы получать значение отклонения, и формирует указание, которое может быть выходным сигналом, предупреждающим об отказе датчика, на основании значения отклонения. Это выполняется в передатчике переменных параметров процесса.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - это упрощенная структурная схема передатчика переменных параметров процесса, соединенного с основной системой и датчиками в процессе.
Фиг. 2 - это блок-схема последовательности операций, иллюстрирующая один вариант осуществления работы системы, показанной на фиг. 1.
Фиг. 3 - это блок-схема последовательности операций, иллюстрирующая один вариант осуществления работы системы, показанной на фиг. 1, для нескольких датчиков.
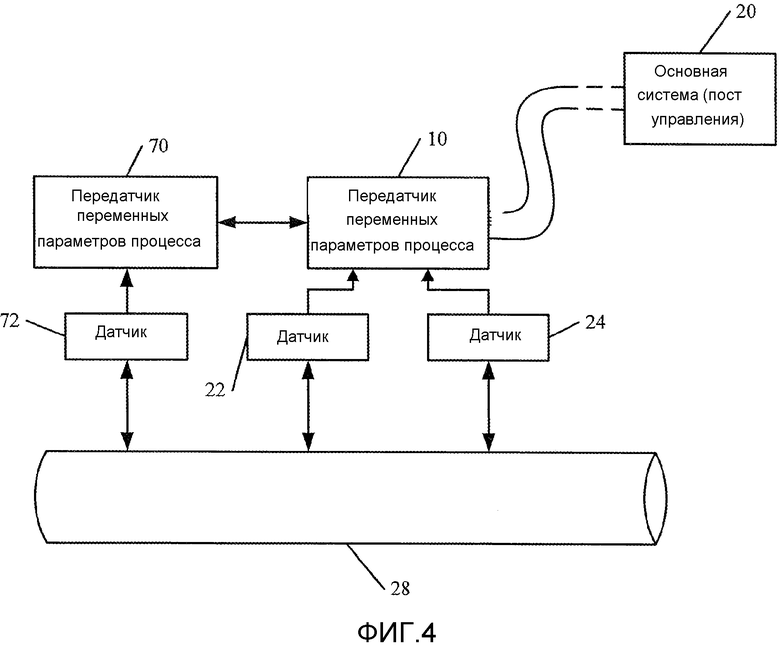
Фиг. 4 - это структурная схема, иллюстрирующая один вариант осуществления нескольких передатчиков переменных параметров процесса и нескольких датчиков.
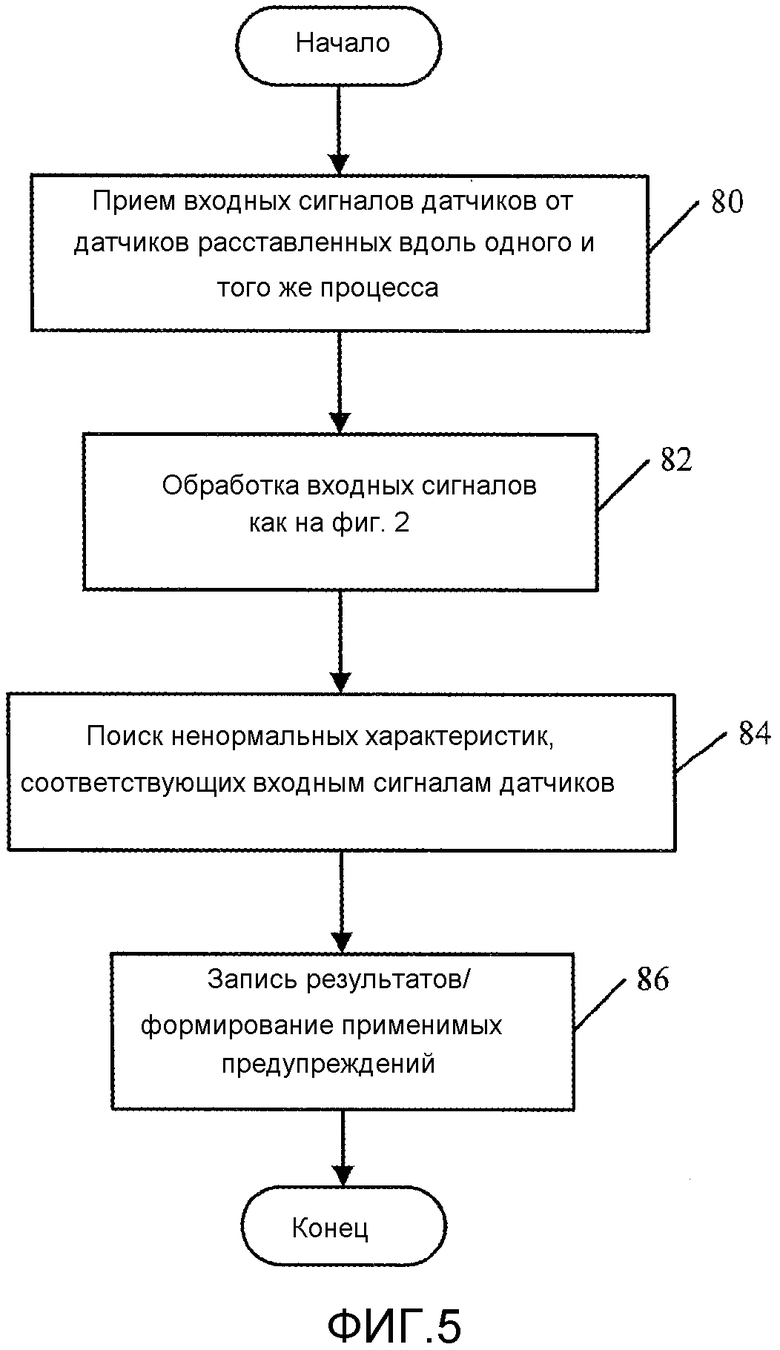
Фиг. 5 - это блок-схема последовательности операций, иллюстрирующая один вариант осуществления работы системы, показанной на фиг. 4.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 - это упрощенная структурная схема передатчика 10 в соответствии с одним вариантом осуществления. Передатчик 10 в варианте осуществления, показанном на фиг. 1, включает в себя аналого-цифровой (A/D) преобразователь 12, процессор 14, память 16 и компонент 18 ввода/вывода (I/O). Передатчик 10 переменных параметров процесса также в качестве примера включает в себя компонент 19 согласования. Передатчик 10 показан соединенным с множеством различных датчиков 22 и 24 переменных параметров процесса (PV). Передатчик 10 также показан соединенным с основной системой 20 через контур 26 управления. Конечно, передатчик 10 может быть соединен с линией беспроводной связи вместо или в качестве дополнения к контуру 26 управления процессом. В одном варианте осуществления контур 26 управления процессом обеспечивает электропитание передатчика 10.
Датчики 22 и 24 являются иллюстративными датчиками переменных параметров процесса, которые принимают входные сигналы от процесса 28, который отслеживается. Например, датчик 22 может быть иллюстративно термопарой, которая измеряет температуру, и датчик 24 может также быть термопарой или другим датчиком, таким как датчик потока. Другие PV-датчики могут включать в себя множество датчиков, таких как датчики давления, pH-датчики и т.д. Датчики 22 и 24 в качестве примера обеспечивают выходной сигнал, который указывает измеренный переменный параметр процесса, компоненту 19 согласования.
Компонент 19 согласования иллюстративно согласует сигналы, принятые от датчиков 22 и 24, например, усиливая их, линеаризуя их и т.д., и подает их в A/D-преобразователь 12. Аналоговые сигналы, поданные в A/D-преобразователь 12, таким образом, указывают измеренные параметры. A/D-преобразователь 12 преобразует аналоговые сигналы в цифровые сигналы и подает их в процессор 14.
В одном варианте осуществления процессор 14 является компьютерным микропроцессором или микроконтроллером, который имеет ассоциированную память 16 и схему генератора тактовых импульсов (не показана) и обеспечивает информацию, касающуюся измеренных параметров, I/O-компоненту 18. I/O-компонент 18, в свою очередь, подает эту информацию в основную систему 20 через контур 26 управления. I/O-компонент 18 может подавать информацию через контур 26 управления либо в цифровом формате, либо в аналоговом формате, управляя электрическим током (I) через контур 26. В любом случае, информация, относящаяся к измеренным параметрам, обеспечивается через контур 26 управления посредством передатчика 10.
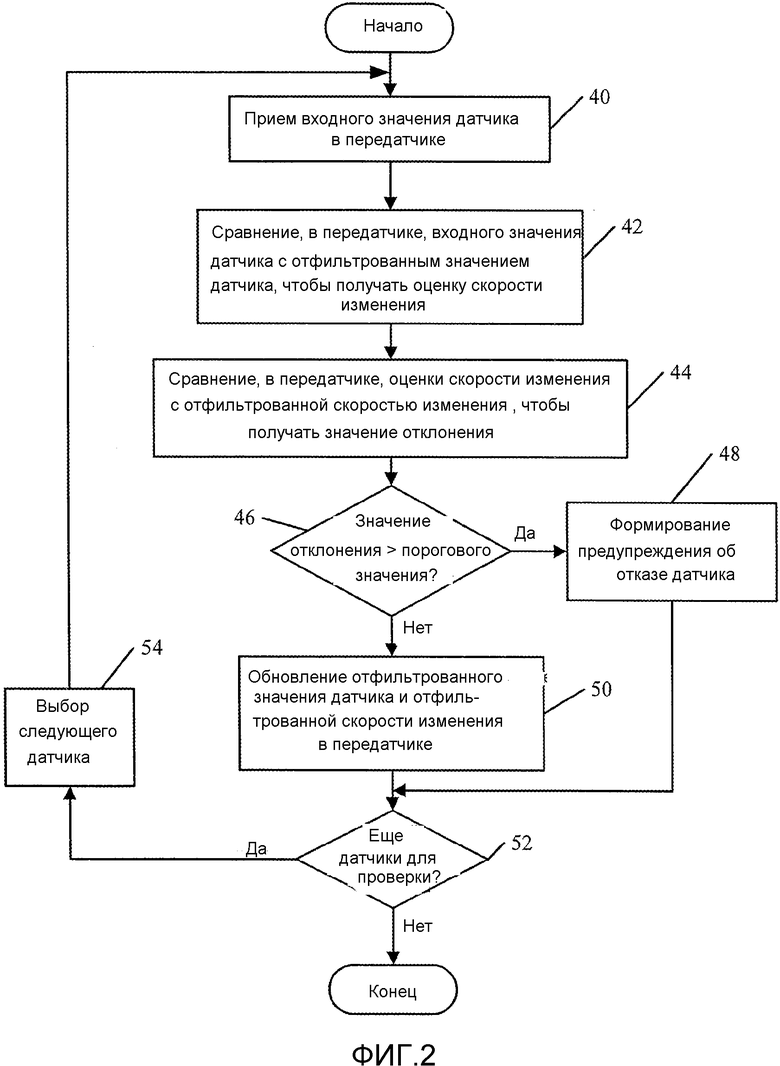
В варианте осуществления, показанном на фиг. 1, процессор 14 также включает в себя детектор 30 отклонения датчика. Детектор 30 обнаруживает статистику, относящуюся к сигналам датчика, обеспечиваемым датчиками 22 и 24, и идентифицирует, ухудшают ли датчики 22 и/или 24 свои характеристики, отказывают или близки к отказу. Фиг. 2 - это блок-схема последовательности операций, иллюстрирующая работу передатчика 10 переменных параметров процесса и, в частности, работу детектора 30 отклонения датчика при идентификации датчиков, которые отказывают или которые близки к отказу.
Как обсуждалось выше, некоторые обычные основные системы вычисляют статистику стандартной ошибки оценки (Se) для того, чтобы анализировать данные измерений в попытке идентифицировать отказывающие датчики. Однако предполагается, что это не выполнятся в компоненте, встроенном в передатчик 10. В отличие от этого, детектор 30 отклонения датчика может обрабатывать сигналы датчика, принятые от A/D-преобразователя 12, для того, чтобы идентифицировать датчики, которые ухудшают свои характеристики, отказывают или близки к отказу. При этом датчик 14 сначала принимает входные значения датчика от A/D-преобразователя 12. Это указано блоком 40 на фиг. 2. Затем, вместо вычисления Se-значения, детектор 30 отклонения датчика использует оператор задержки (или фильтр), чтобы осуществлять доступ к памяти 16 и сравнивать поступающие данные от датчика с отфильтрованным сигналом датчика, чтобы получать оценку скорости изменения сигнала датчика. Это делается следующим образом:
 Уравнение 5
Уравнение 5
где x - это оценка скорости изменения сигнала датчика;
y - это входной сигнал от датчика (который оцифрован посредством A/D-преобразователя 12); и
 - это среднее некоторого числа предыдущих выборок входных значений датчика для этого данного датчика и сохраненных в памяти 16.
- это среднее некоторого числа предыдущих выборок входных значений датчика для этого данного датчика и сохраненных в памяти 16.
Сравнение входного значения (y) датчика с отфильтрованным значением () датчика, чтобы получать оценку (x) скорости изменения, указано блоком 42 на фиг. 2.
Детектор 30 отклонения датчика затем осуществляет доступ к памяти 16 и выполняет аналогичную операцию фильтрации по оценке (x) скорости изменения, полученной в уравнении 5 выше, для того, чтобы получать значение отклонения следующим образом:
 Уравнение 6
Уравнение 6
где  - это среднее некоторого числа i предыдущих вычислений скорости изменения, выполненных для этого данного датчика и сохраненных в памяти 16. Сравнение оценки скорости изменения текущего сигнала с отфильтрованным значением скорости изменения, чтобы получать значение отклонения, показанное в уравнении 6, указано блоком 44 на фиг. 2.
- это среднее некоторого числа i предыдущих вычислений скорости изменения, выполненных для этого данного датчика и сохраненных в памяти 16. Сравнение оценки скорости изменения текущего сигнала с отфильтрованным значением скорости изменения, чтобы получать значение отклонения, показанное в уравнении 6, указано блоком 44 на фиг. 2.
Детектор 30 отклонения датчика затем сравнивает новое значение (dev) отклонения с пороговым значением, чтобы определять, находится ли отклонение, соответствующее текущим входным сигналам датчика, за некоторым пороговым значением, которое будет указывать, что датчик ухудшил свои характеристики, отказывает или близок к отказу полностью. Конкретное значение для порогового значения может быть определено эмпирически, или оно может быть основано на конкретном типе обрабатываемого датчика. Например, если датчик является термопарой, измеряющей температуру в процессе первого типа, тогда пороговое значение может быть задано на одном уровне, тогда как, если датчик является термопарой в процессе другого типа или если он является другим типом датчика (таким как pH-датчик или датчик потока), тогда пороговое значение может быть задано по-другому, по желанию. Сравнение значения отклонения с пороговым значением указано блоком 46 на фиг. 2.
Если значение отклонения превышает или превосходит пороговое значение в блоке 46, тогда детектор 30 отклонения датчика формирует указание этого пользователю. В одном варианте осуществления это указание принимает форму предупреждения 36 об отказе датчика, которое обеспечивается I/O-компоненту 18 для передачи основной системе 20. Это указано блоком 48 на фиг. 2.
Однако если в блоке 46 определяется, что значение отклонения не превосходит пороговое значение, тогда детектор 30 отклонения датчика обновляет отфильтрованное значение датчика и отфильтрованную оценку скорости изменения в передатчике 10 и сохраняет эти обновленные значения в памяти 16. Это указано блоком 50 на фиг. 2.
Процессор 14 затем определяет, существуют ли еще датчики для проверки. Это указано блоком 52 на фиг. 2. Если нет, то обработка завершается и детектор 30 ожидает, пока не наступит время выполнять свое обнаружение снова. Однако если в блоке 52 определяется, что существуют еще датчики для проверки, тогда выбирается следующий датчик, как указано в блоке 54 на фиг. 2, и обработка возвращается обратно к блоку 40.
Таким образом, из вышеприведенного описания видно, что детектор 30 отклонения датчика может определять, отказывают ли датчики, реализуя уравнения 5 и 6, и это все делается посредством компонентов, встроенных в передатчик 10 переменных параметров процесса. Это обусловлено тем, что вместо использования Se-уравнений, которые требуют множества процессов, с каждой новой точкой отсчета, и которые также включают в себя усреднение, вычисление линии тренда, оценку теоретических значений из тренда по числу ранее скорректированных выборок и использование сложной математики, такой как множественные возведения в квадрат и вычисления квадратного корня, детектор 30 отклонения датчика просто работает, сравнивая новое входное значение датчика со скользящим средним предыдущих значений, и делает то же для значения отклонения. Это гораздо менее затратно с точки зрения непроизводительных затрат процессора и времени и при этом обеспечивает характеристики, аналогичные характеристикам основных систем, чтобы обнаруживать отказ датчика. Таким образом, ухудшение характеристик и отказ датчика могут быть обнаружены в самом передатчике 10 переменных параметров процесса без необходимости вычислений в основной системе 20.
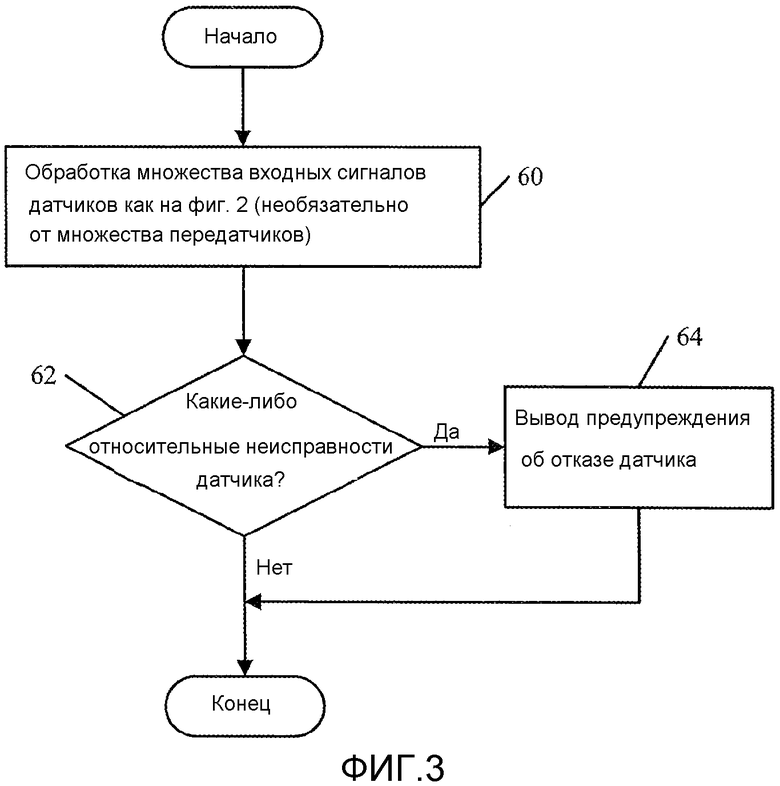
В то время как фиг. 2 иллюстрирует работу системы, показанной на фиг. 1, для обработки датчиков на индивидуальной основе, система может также быть использована, чтобы обрабатывать входные сигналы от множества различных датчиков 22 и 24, которые либо измеряют переменные параметры в процессе 28 и подают сигналы датчиков в один и тот же передатчик 10 переменных параметров процесса, либо подают сигналы во множество различных передатчиков переменных параметров процесса. Когда принимаются сигналы от множества различных датчиков, детектор 30 отклонения датчика может обнаруживать или опознавать неисправности, сравнивая значения от датчиков с ожидаемой зависимостью между этими значениями. Например, датчики 22 и 24 оба измеряют температуру в различных точках в процессе 28, может ожидаться зависимость между значениями этих двух датчиков (например, одно на определенный процент холоднее или горячее, чем другое). Аналогично, ожидается, что значения от этих датчиков могут изменяться относительно друг друга согласно конкретной заданной зависимости. В качестве примера, если ожидается, что сигналы датчика находятся в линейной зависимости и если один из датчиков демонстрирует быстрый рост температуры, а другой - нет, тогда ожидаемая зависимость между этими двумя датчиками не наблюдается и может быть, что один из датчиков отказал или близок к отказу. Фиг. 3 - это блок-схема последовательности операций, иллюстрирующая работу системы, показанной на фиг. 1, для того, чтобы выполнять эти типы обнаружений.
Передатчик 10 сначала принимает и обрабатывает множественные входные сигналы датчиков, как показано на фиг. 2. Конечно, входные сигналы датчиков могут необязательно быть от множества различных передатчиков, или они могут быть от нескольких различных процессов, или возможны оба варианта. Прием и обработка входных сигналов датчика, как обсуждалось выше относительно фиг. 2, иллюстрированы блоком 60 на фиг. 3.
Детектор 30 отклонения датчика затем сравнивает значения, полученные посредством обработки, как описано выше относительно фиг. 2, чтобы определять, существуют ли какие-либо относительные неисправности датчика, сравнивая значения по множественным различным входным сигналам датчиков, обработанным в блоке 60. Это указано блоком 62 на фиг. 3. Если существуют неисправности датчика, как определено в блоке 62, тогда детектор 30 отклонения датчика выводит указание этого (такое как предупреждение 36 об отказе датчика), как указано блоком 64. Если нет, обработка завершается.
Следует отметить, что в варианте осуществления, показанном на фиг. 3, ожидаемая корреляция между входными значениями датчика может быть сохранена в памяти 16 и доступна посредством детектора 30 отклонения датчика при выполнении определения относительно того, существуют ли какие-либо относительные неисправности датчика. Зависимость может быть сохранена в памяти 16 как уравнение или как таблица значений, которая может быть использована как таблица поиска, или другими способами. Только в качестве примера, может быть случай, когда передатчик 10 используется в одном или более процессах, где ожидается линейная корреляция от датчика к датчику или от процесса к процессу. При выполнении обнаружения, показанного на фиг. 3, детектор 30 отклонения датчика может определять, существует ли относительная ненормальность процесса или датчика, просто посредством определения того, наблюдается ли ожидаемая линейная зависимость между входными значениями. Конечно, также могут быть использованы другие зависимости.
Фиг. 4 - это упрощенная структурная схема, показывающая передатчик 10 переменных параметров процесса вместе с датчиками 22 и 24 и основной системой 20. Фиг. 4 показывает, что датчики 22 и 24 обнаруживают переменные параметры процесса в процессе (или трубопроводе) 28. Фиг. 4 показывает, что дополнительный передатчик 70 переменных параметров процесса, вместе с другим датчиком 72, также размещен, чтобы обнаруживать переменный параметр процесса из процесса (или трубопровода) 28. Передатчики 10 и 70 соединены для передачи данных друг с другом.
Будет понятно, что использование детектора 30 отклонения датчика, чтобы вычислять отклонения для нескольких передатчиков или входных сигналов датчиков, обеспечивает детектору 30 возможность вычислять скорость и ускорение переменного параметра процесса, поскольку расстояние между датчиками 22, 24 и 72 известно. Расстояние может быть иллюстративно введено в детектор 30 отклонения датчика посредством конфигурируемого пользовательского ввода или иным образом.
Более конкретно, когда датчики присоединены к одному и тому же процессу 28 в различных точках, как иллюстрировано на фиг. 4, и расстояние между датчиками известно, тогда детектор 30 отклонения датчика может обнаруживать характеристики на канале каждого датчика, которые представляют увеличение или уменьшение переменного параметра процесса. Когда это увеличение или уменьшение переменного параметра процесса видно по двум или трем (или более) каналам, детектор 30 отклонения датчика может вычислять как скорость, так и ускорение для переменного параметра процесса. Например, если датчики 22, 24 и 72 все являются температурными датчиками, тогда посредством обработки сигналов, вводимых от этих датчиков, как описано выше относительно фиг. 2 и/или 3, детектор 30 отклонения датчика может идентифицировать характеристики по каналу каждого датчика, который представляет увеличение или уменьшение температуры, и может, таким образом, вычислять скорость и ускорение изменений температуры в процессе 28. Аналогично, детектор 30 отклонения датчика может идентифицировать пики или впадины во входном сигнале от канала одного датчика к следующему, чтобы идентифицировать рассеивание температуры или потерю тепла по всему процессу 28 посредством наблюдения отличий от канала к каналу в пиках или впадинах. Детектор 30 отклонения датчика может также идентифицировать состояние данного канала датчика как отклоняющееся от нормальной зависимости и, таким образом, указывать, что точность сигнала на этом канале является неопределенной.
Фиг. 5 - это блок-схема последовательности операций, иллюстрирующая работу системы, показанной на фиг. 4, для того, чтобы выполнять эти типы вычислений. Передатчик 10 переменных параметров процесса сначала принимает входные сигналы датчиков от датчиков 22, 24 и 72 (через передатчик 70 переменных параметров процесса), расставленных с интервалами вдоль одного и того же процесса 28. Это указано блоком 80 на фиг. 5. Детектор 30 отклонения датчика в передатчике 10 переменных параметров процесса затем обрабатывает входные сигналы датчика, как описано выше относительно фиг. 2. Это указано блоком 82 на фиг. 5.
Детектор 30 отклонения датчика затем отыскивает ненормальную характеристику, соответствующую входным сигналам датчика. Это может быть, например, отклонение от ожидаемой зависимости, характеристики, соответствующие ненормальной скорости и ускорению, характеристики, соответствующие ненормальным отличиям переменного параметра процесса (такие как рассеивание температуры или потеря тепла) вдоль процесса и т.д. Это указано блоком 84 на фиг. 5.
Детектор 30 отклонения датчика затем записывает идентифицированные результаты в память 16 и формирует любые применимые предупреждения 36. Это указано блоком 86 на фиг. 5.
В то время как в вышеприведенном описании представлен ряд примеров переменных параметров процесса, которые могут быть измерены, разумеется, следует понимать, что по существу тем же способом может быть измерено и обработано множество других переменных параметров процесса. Примеры таких других переменных параметров процесса включают в себя давление, уровень, поток или расход и т.д.
Хотя настоящее изобретение описано со ссылкой на иллюстративные варианты осуществления, специалистам в данной области техники будет понятно, что могут быть внесены изменения в форме и деталях, не выходящие за рамки сущности и объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДЕЙСТВИТЕЛЬНОЙ МОЩНОСТЬЮ ПЕРЕДАЧИ БАЗОВОЙ СТАНЦИИ В СОТОВОЙ СИСТЕМЕ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2156545C2 |
| НОРМАЛИЗОВАННАЯ ДИНАМИКА ПРОЦЕССА | 2014 |
|
RU2633300C1 |
| ДИАГНОСТИКА ШУМА ИЗМЕРЕНИЯ ПАРАМЕТРА ПРОЦЕССА | 2013 |
|
RU2609758C2 |
| ИЗМЕРЕНИЕ ВЛАЖНОГО ГАЗА | 2007 |
|
RU2453816C2 |
| ПЕРЕДАТЧИК ТЕМПЕРАТУРЫ ПРОЦЕССА С УЛУЧШЕННОЙ ДИАГНОСТИКОЙ ДАТЧИКА | 2013 |
|
RU2617885C2 |
| КОНТРОЛЬ ЗА НЕУСТОЙЧИВОСТЬЮ ПЛАМЕНИ ПОСРЕДСТВОМ ДАВЛЕНИЯ ТЯГИ И ПЕРЕМЕННОЙ ПРОЦЕССА | 2013 |
|
RU2601021C1 |
| СПОСОБ ДИАГНОСТИКИ ОБНАРУЖЕНИЯ ОТКАЗА КОМПОНЕНТА РЕГУЛИРУЮЩЕГО КЛАПАНА | 2009 |
|
RU2493467C2 |
| КОНТРОЛЬ СОСТОЯНИЯ ТОРМОЗНОЙ СИСТЕМЫ | 2001 |
|
RU2284274C2 |
| АППАРАТ ДЛЯ МЕХАНИЧЕСКОЙ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ И МОНИТОРИНГА ДЫХАНИЯ | 2017 |
|
RU2737295C2 |
| ОЦЕНКА ОТКЛОНЕНИЯ ЧАСТОТЫ И КАДРОВАЯ СИНХРОНИЗАЦИЯ В ОЧРК-СИСТЕМЕ | 2005 |
|
RU2323537C1 |
Изобретение относится к передатчикам переменных параметров процесса, используемым в системах мониторинга и управления процессом. Технический результат - повышение быстродействия передатчика. Передатчик (10) переменных параметров процесса включает в себя память (16), которая хранит отфильтрованное значение датчика, которое вычислено на основании предыдущего принятого значения датчика, и отфильтрованное значение скорости изменения, которое вычислено на основании предыдущего значения скорости изменения. Передатчик (10) переменных параметров процесса также включает в себя контроллер (14), который принимает значение датчика и сравнивает его с отфильтрованным значением датчика, чтобы получить значение скорости изменения. Контроллер (14) также сравнивает значение скорости изменения с отфильтрованным значением скорости изменения, чтобы получить значение отклонения, и формирует выводимое указание, такое как выводимое предупреждение об отказе датчика, на основании значения отклонения. 3 н. и 17 з.п. ф-лы, 5 ил.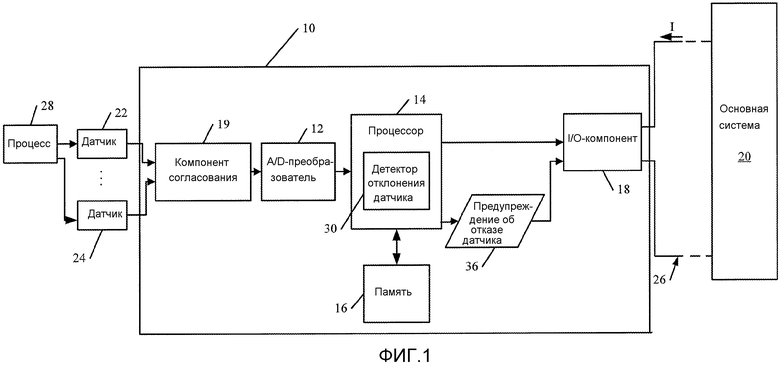
1. Передатчик переменных параметров процесса, содержащий:
датчик, измеряющий переменный параметр процесса и обеспечивающий значение датчика, указывающее измеренный переменный параметр процесса;
память, сохраняющую отфильтрованное значение датчика, содержащее значение скорости изменения для датчика, которое вычислено на основании ранее принятого значения датчика, и отфильтрованное значение скорости изменения, содержащее значение отклонения, указывающее на величину изменения в значении скорости изменения для датчика, которое вычислено на основании ранее вычисленного значения скорости изменения; и
контроллер, принимающий значение датчика от датчика, который измеряет переменный параметр процесса, и сравнивающий значение датчика с отфильтрованным значением датчика, чтобы получить значение скорости изменения, причем контроллер дополнительно сравнивает значение скорости изменения с отфильтрованным значением скорости изменения, чтобы получить значение отклонения, и формирует выходное указание на основании значения отклонения.
2. Передатчик переменных параметров процесса по п. 1, дополнительно содержащий:
компонент вывода, обеспечивающий выходное указание в качестве выходного сигнала предупреждения об отказе или ухудшении характеристик датчика в основную систему по линии связи.
3. Передатчик переменных параметров процесса по п. 2, в котором компонент вывода обеспечивает вывод предупреждения об отказе датчика через контур управления процессом.
4. Передатчик переменных параметров процесса по п. 1, в котором контроллер вычисляет отфильтрованное значение датчика, формируя скользящее среднее ранее принятых значений датчика.
5. Передатчик переменных параметров процесса по п. 4, в котором контроллер формирует обновленное отфильтрованное значение датчика на основании значения датчика и отфильтрованного значения датчика и сохраняет обновленное отфильтрованное значение датчика в качестве отфильтрованного значения датчика в памяти.
6. Передатчик переменных параметров процесса по п. 5, в котором контроллер вычисляет отфильтрованное значение скорости изменения, формируя скользящее среднее ранее вычисленных значений скорости изменения.
7. Передатчик переменных параметров процесса по п. 6, в котором контроллер формирует обновленное отфильтрованное значение скорости изменения на основании значения скорости изменения и отфильтрованного значения скорости изменения и сохраняет обновленное отфильтрованное значение скорости изменения в качестве отфильтрованного значения скорости изменения в памяти.
8. Передатчик переменных параметров процесса по п. 1, в котором контроллер принимает множество различных значений датчиков от множества различных датчиков и получает значение скорости изменения, соответствующее каждому из множества значений датчиков.
9. Передатчик переменных параметров процесса по п. 8, в котором контроллер сравнивает характеристики каждого из множества значений датчика друг с другом для определения, демонстрируют ли характеристики ожидаемую зависимость относительно друг друга.
10. Передатчик переменных параметров процесса по п. 1, в котором контроллер сравнивает значение датчика с отфильтрованным значением датчика согласно уравнению:
где х - это оценка значения скорости изменения;
y - это принятое значение датчика;

при этом контроллер получает значение отклонения согласно уравнению:
где 
11. Способ идентификации характеристик сигналов датчика с помощью процессора в передатчике переменных параметров процесса, причем способ содержит этапы, на которых:
принимают в процессоре в передатчике переменных параметров процесса значение датчика от датчика, который измеряет переменный параметр процесса;
сравнивают посредством процессора в передатчике переменных параметров процесса значение датчика с сохраненным значением датчика, сохраненным в памяти в передатчике переменных параметров процесса, причем сохраненное значение датчика указывает на скользящее среднее множества ранее принятых значений датчика для определения скорости изменения;
определяют значение отклонения на основании сравнения значения скорости изменения в датчике и значения скорости изменения предыдущих значений для значения датчика;
идентифицируют посредством процессора в передатчике переменных параметров процесса характеристику датчика на основании значения отклонения, указывающую, работает ли датчик корректно; и
когда датчик не работает корректно, формируют посредством процессора в передатчике переменных параметров процесса выходное указание.
12. Способ по п. 11, в котором сравнение формирует значение скорости изменения и способ дополнительно содержит этапы, на которых:
сравнивают посредством процессора в передатчике переменных параметров процесса значение скорости изменения с сохраненным значением скорости изменения, сохраненным в памяти в передатчике переменных параметров процесса, причем сохраненное значение скорости изменения указывает на множество предыдущих значений скорости изменения; и
при этом идентификация содержит этап, на котором идентифицируют посредством процессора в передатчике переменных параметров процесса характеристику датчика на основании сравнения значения скорости изменения с сохраненным значением скорости изменения.
13. Способ по п. 12, в котором сохраненное значение скорости изменения содержит первое, увеличивающееся значение скорости изменения и второе, уменьшающееся значение скорости изменения, и при этом сравнение значения скорости изменения с сохраненным значением скорости изменения содержит этап, на котором:
сравнивают значение скорости изменения как с первым, так и со вторым значениями скорости изменения.
14. Способ по п. 12, в котором сравнение значения скорости изменения с сохраненным значением скорости изменения обеспечивает упомянутое значение отклонения, и при этом идентификация характеристики датчика содержит этап, на котором сравнивают значение отклонения с сохраненным пороговым значением.
15. Способ по п. 11, в котором прием содержит этапы, на которых:
принимают значение датчика, соответствующее каждому из множества различных датчиков; и
сравнивают значения датчика, соответствующие множеству различных датчиков, и при этом идентификация содержит этап, на котором идентифицируют характеристику датчика как указывающую, демонстрируют ли значения датчика ожидаемую зависимость относительно друг друга.
16. Способ по п. 15, в котором формирование выходного указания содержит этап, на котором формируют предупреждение относительно датчика, выводимое, когда значения датчика от множества различных датчиков не демонстрируют ожидаемую зависимость.
17. Способ по п. 11, дополнительно содержащий этап, на котором:
передают выходное указание в качестве выводимого предупреждения относительно датчика основной системе через контур управления процессом.
18. Способ по п. 11, дополнительно содержащий этап, на котором:
передают выходное указание в качестве выводимого предупреждения относительно датчика основной системе по линии беспроводной связи.
19. Передатчик переменных параметров процесса, содержащий:
память, сохраняющую заданную зависимость датчика, указывающую ожидаемую зависимость между отклонением в скорости изменения значений датчика, вводимых от множества различных датчиков; и
процессор, размещенный в передатчике переменных параметров процесса и принимающий входные значения датчика от множества различных датчиков, причем процессор осуществляет доступ к заданной зависимости датчика в памяти, чтобы определить, демонстрируют ли входные значения датчика ожидаемую зависимость, и если нет, контроллер формирует выводимое предупреждение относительно датчика.
20. Передатчик переменных параметров процесса по п. 19, в котором множество различных датчиков размещены таким образом, чтобы измерять один или более переменных параметров процесса для одного и того же процесса, и при этом процессор принимает по меньшей мере одно из входных значений датчика от второго передатчика переменных параметров процесса.
| US 6017143A, 25.01.2000 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТУРБОАГРЕГАТА | 1994 |
|
RU2056506C1 |
| RU 2007137820 A, 20.05.2009 | |||
| СПОСОБ ОДНОВРЕМЕННОГО ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ МОЛЕКУЛ СО И CO И УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ МОЛЕКУЛ СО И CO | 2008 |
|
RU2384837C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| RU 2006133971 A 10.04.2008. | |||

