Изобретение относится к машиностроению и может использоваться для соединения звеньев механизмов.
Известно, что любая механическая система (механизм, машина) состоит из звеньев и соединений звеньев. Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой [1, с.20, 5-ый абзац сверху]. Часть звена, которой оно взаимодействует с другим звеном, называется геометрическим элементом звена.
Известна одноподвижная поступательная кинематическая пара [1, стр.60, рис.100], включающая два звена с геометрическими элементами в виде охватываемой и охватывающей поверхностей. В этой паре первое звено может двигаться относительно второго звена только поступательно (движение 77) вдоль одной из осей декартовой системы координат. Недостатком этой пары является невозможность воспроизведения дополнительного поступательного движения вдоль одной из двух оставшихся свободных осей координат.
Примеры двухподвижных кинематических пар, обеспечивающих два независимых поступательных движения (ПП) во взаимно перпендикулярных направлениях, в технике являются известными. Тем не менее следует отметить, что академиком И.И. Артоболевским в [1, с.59, строки 11-9 снизу] записано: «Пары IV класса третьего вида (допускающие только два поступательных движения) созданы быть не могут». В связи с этим авторы предлагаемого технического решения утверждают, что реализация кинематической пары, воспроизводящей два поступательных движения, возможна. При этом предлагаемое техническое решение обладает новизной перед известными конструкциями кинематических пар с двумя поступательными движениями (ПП).
Наиболее близкой к заявляемой кинематической паре является двухконтактная двухподвижная пара [2], обеспечивающая комплекс двух относительных поступательных движений (ПП) и принимаемая за прототип. Пара образуется двумя звеньями - плоскостью и параллелепипедом, снабженными конусообразными выступами, при этом контакт звеньев происходит по двум линиям образующих конусообразных выступов, выполненных с разными углами конусности.
Недостаток прототипа заключается в том, что ни одна из поверхностей его звеньев не является охватывающей, поэтому такая пара не может быть выполнена удерживающей, значит, звенья пары свободно могут разомкнуться между собой. Недостатком прототипа также является сложность изготовления его звеньев, так как каждое из них обязательно должно быть исполнено с конусообразными выступами, имеющими разные углы конусности. Эти факты ограничивают применение такой пары при создании механизмов.
Задачей изобретения является создание удерживающей кинематической пары, в которой одно из звеньев было бы выполнено с геометрическим элементом в виде охватываемой поверхности, а второе - в виде охватывающей, чтобы при этом заявляемая кинематическая пара обеспечивала требуемый комплекс двух поступательных движений (ПП) вдоль перпендикулярных осей, а также определение такого геометрического исполнения звеньев пары, которое может быть легко осуществлено при ее изготовлении.
Сущность заявляемого устройства заключается в том, что предлагается двухподвижная кинематическая пара, включающая два звена с геометрическими элементами, входящими в линейчатый контакт, при этом поверхности геометрических элементов звеньев выполнены в виде охватываемой и охватывающей поверхностей, при этом охватываемая поверхность первого звена выполнена в виде прямого эллиптического цилиндра, а охватывающая поверхность второго звена представляет собой сквозной криволинейный паз, причем высота паза принята равной длине малой оси эллипса основания цилиндра, а длина паза - меньшей длины образующей цилиндра.
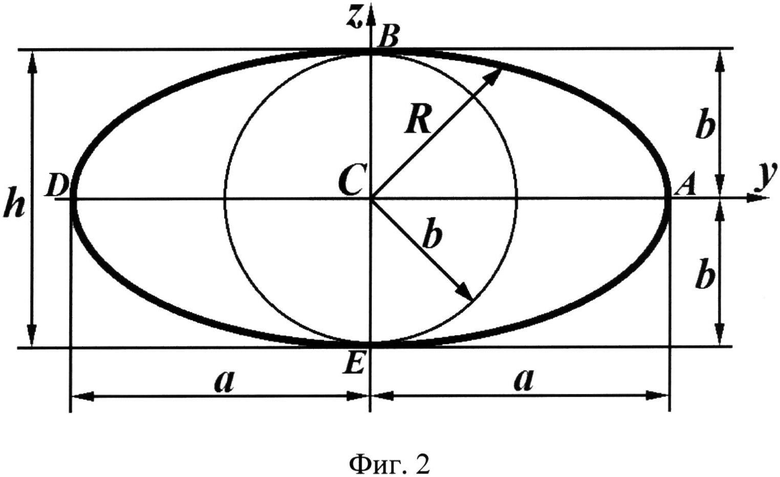
На фиг.1 показана двухподвижная кинематическая пара между звеньями 1 и 2. На фиг.2 показана направляющая (основание) прямого эллиптического цилиндра, выполненная в форме эллипса.
Двухподвижная кинематическая пара (фиг.1) включает в свой состав звенья 1 и 2, входящие между собой в линейчатый контакт. Геометрические элементы звеньев пары выполняются в виде охватываемой (звено 1) и охватывающей (звено 2) поверхностей, взаимодействующих между собой. Охватываемая поверхность звена 1 принимается в виде прямого эллиптического цилиндра [3, стр.993], для которого направляющей (основанием) является эллипс (фиг.2) с длиной большой оси 2a, длиной малой оси 2b [3, стр.977], при этом длина образующей цилиндра равна l1. Охватывающая поверхность звена 2 представляет собой сквозной замкнутый криволинейный паз (под пазом согласно [4, стр.437] понимается углубление в детали прямоугольного, трапецеидального или иного поперечного сечения, служащего для размещения шпонки, ролика, толкателя и т.п.) шириной S, длиной l2 и высотой h. При этом высота паза h принимается равной длине 2b малой оси эллипса основания цилиндра 1 (h=2b), a длина цилиндра l1 - большей длины паза l2(l1>l2)
Относительное движение звеньев рассматривается в декартовой системе координат xyz. В направлении осей x и y звено 7 относительно звена 2 может двигаться только поступательно (движения ПП).
Относительный поворот звеньев 7 и 2 вокруг оси x, проходящей через центр C цилиндра, невозможен, т.к. длина малой полуоси b эллипса во всех точках дуг ABD и DEA (кроме точек B и E) меньше радиуса R эллипса (радиусом эллипса в данной точке называется расстояние от его центра до данной точки [5]), то есть b<R (фиг.2). Только в точках B и E соблюдается условие b=R, при котором звено 7 удерживается звеном 2.
Относительный поворот звеньев 7 и 2 вокруг оси y невозможен в силу контакта их поверхностей по линии l2. Относительные движения звеньев вдоль и вокруг оси z невозможны в связи с замкнутостью контактов и выполнением паза криволинейным. Лишь при выполнении паза в звене 2 прямолинейным мог бы появиться относительный поворот звеньев вокруг оси z и пара звеньев 1 и 2 стала бы трехподвижной с комплексом движений ППВ. Именно исполнение паза криволинейным исключает такой поворот и предлагаемая кинематическая пара становится двухподвижной (ПП). При этом неизбежное смещение звена 1 вдоль оси z является зависимым и всегда может быть определено через кривизну паза звена 2.
Двухподвижная кинематическая пара работает следующим образом. Задавая в пространстве xyz движение звену 1 с геометрическим элементом в виде прямого эллиптического цилиндра, охватываемого поверхностью паза звена 2, последнее (звено 2) получит относительно звена 1 два независимых поступательных движения вдоль осей x и y. Невозможными относительными движениями в предлагаемой кинематической паре оказываются вращательные движения вокруг осей x и y, а также вращательное и поступательное движения относительно оси z. Таким образом, заявляемая кинематическая пара обеспечивает два относительных движения.
Использованные источники
1. Артоболевский И.И. Теория механизмов. Изд-во «Наука», Гл. ред. физ. - мат. лит., 1965, 776 с.
2. Пат. №2137964 C1 РФ, МПК F16H 25/00, F16S 5/00. Двухконтактная двухподвижная кинематическая пара / Дворников Л.Т., Живаго Э.Я. - №98107446/28; заявл. 20.04.1998; опубл. 20.09.1999; 1 ил.
3. И.М. Виноградов. Математическая энциклопедия. Т. 5. Изд-во «Советская энциклопедия», 1985, 1248 с.
4. Крайнев А.Ф. Механика машин. Фундаментальный словарь. М.: Машиностроение, 2000. - 904 с.
5. Википедия: [Электронный ресурс]. URL: http://ru.wikipedia.org/wiki/Эллипс (Дата обращения: 04.06.2013).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2014 |
|
RU2564788C2 |
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2012 |
|
RU2520624C2 |
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2578809C2 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| УДЕРЖИВАЮЩАЯ ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2012 |
|
RU2502898C1 |
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2240454C1 |
| Трехзвенное кинематическое соединение с тремя относительными движениями | 2015 |
|
RU2610239C1 |
| УРАВНОВЕШЕННЫЙ САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2009 |
|
RU2397384C1 |
| ДВУХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1996 |
|
RU2098701C1 |
| ЧЕТЫРЕХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2004 |
|
RU2261386C1 |
Изобретение относится к машиностроению и может использоваться для соединения звеньев механизма. Поверхности геометрических элементов звеньев выполнены в виде охватываемой и охватывающей поверхностей. Охватываемая поверхность первого звена выполнена в виде прямого эллиптического цилиндра, а охватывающая поверхность второго звена представляет собой сквозной криволинейный паз. Высота паза принята равной длине малой оси эллипса основания цилиндра, а длина паза - меньшей длины образующей цилиндра. Достигается упрощение конструкции. 2 ил.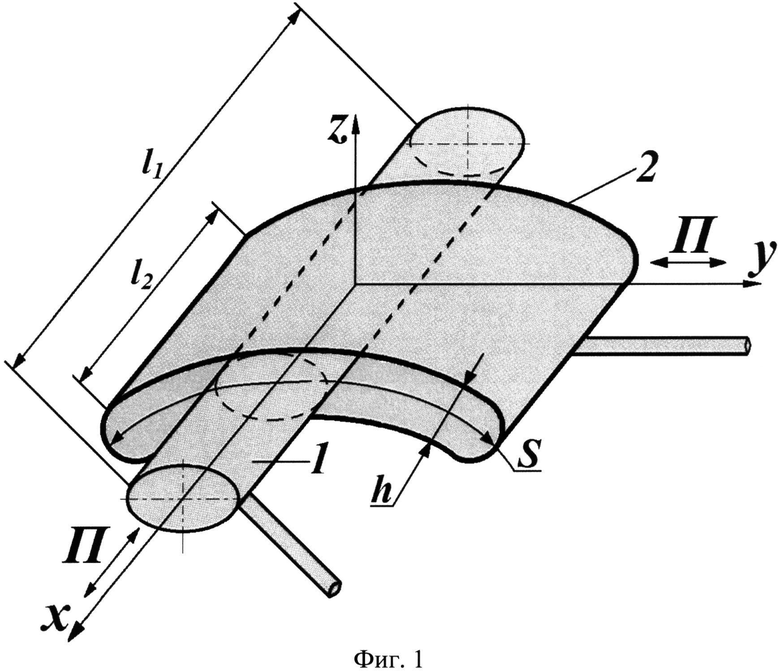
Двухподвижная кинематическая пара, включающая два звена с геометрическими элементами, входящими в линейчатый контакт, отличающаяся тем, что поверхности геометрических элементов звеньев выполнены в виде охватываемой и охватывающей поверхностей, при этом охватываемая поверхность первого звена выполнена в виде прямого эллиптического цилиндра, а охватывающая поверхность второго звена представляет собой сквозной криволинейный паз, причем высота паза принята равной длине малой оси эллипса основания цилиндра, а длина паза - меньшей длины образующей цилиндра.
| ПРОСТРАНСТВЕННЫЙ КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ ВТОРОГО СЕМЕЙСТВА | 2010 |
|
RU2422703C1 |
| ДВУХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137964C1 |
| ДВУХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1996 |
|
RU2098701C1 |
| US 2005193842 A1, 08.09.2005 | |||

