Изобретение относится к машиностроению, в частности к шарнирным соединениям деталей машин.
Из теории механизмов и машин известно, что любая механическая система (механизм, машина) состоит из звеньев и соединений звеньев - кинематических пар, а кинематической парой называют «соединение двух соприкасающихся звеньев, допускающее их относительное движение». (Артоболевский И.И. Теория механизмов и машин. Учебник для втузов. - 4-е изд., перераб. и доп. - М., Наука, Гл. ред. физ.-мат. лит., 1988 - 640 с. 20).
Известна пятиподвижная кинематическая пара (шар-плоскость), которая образована двумя звеньями - шаром и плоскостью. Назовем плоскость опорным звеном, на которое опирается шар, а сам шар - воздействующим звеном, т.е. эта пара есть подвижное соединение воздействующего звена с опорным звеном (Артоболевский И.И. Теория механизмов и машин. Учебник для втузов. - 4-е изд., перераб. и доп.- М., Наука, Гл. ред. физ.-мат. лит., 1988 - 64, с. 24, рис. 1.4в).
Это соединение обеспечивает пять относительных движений воздействующего звена, а именно, три вращательных относительно осей x, y, z и два поступательных движения вдоль осей x и y, а. поступательное движение вдоль оси z невозможно, так как в этом случае звенья теряют контакт между собой и кинематическая пара как таковая исчезает.
Известна также кинематическая пара в виде сферической пары, которая позволяет осуществить лишь три вращательных движения воздействующего звена относительно трех осей декартовой системы координат (Артоболевский И.И. Теория механизмов и машин. Учебник для втузов. - 4-е изд., перераб. и доп. - М., Наука, Гл. ред. физ.-мат. лит., 1988 - 64, с. 31, табл. 1)
Техническае проблема, решаемая предлагаемым изобретением, заключается в обеспечении между подвижными звеньями четырех относительных движений, а именно, трех вращательных и одного поступательного.
Данная техническая проблема решается тем, что в кинематической паре, состоящей из соединения опорного звена и воздействующего звена, согласно изобретению, опорное звено выполнено в виде лунки постоянной отрицательной гауссовой кривизны, а воздействующее звено выполнено в виде круговой бочки, образующая которой является дугой окружности с радиусом по абсолютной величине равным радиусу кривизны опорного звена.
В предлагаемой кинематической паре опорное звено выполнено в виде лунки постоянной отрицательной гауссовой кривизны, а воздействующее звено представляет собой круговую бочку, образующая которой является дугой окружности с радиусом по абсолютной величине равным радиусу кривизны опорного звена - лунки. Воздействующее звено без вращения относительно собственной геометрической оси имеет возможность поступательного перемещения вдоль опорного звена по оси «у». (Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся вузов. - 13-е изд., исправленное. - М.: Наука. Гл. ред. Физ.-мат. лит. 1986 - 544 с.; с. 189, рис. 2.63; с. 415).
Технический результат, получаемый при реализации предложенной одноконтактной четырехподвижной кинематической пары, заключается в реализации возможности при трех относительных вращательных движениях обеспечить одно относительное поступательное движение звеньев.
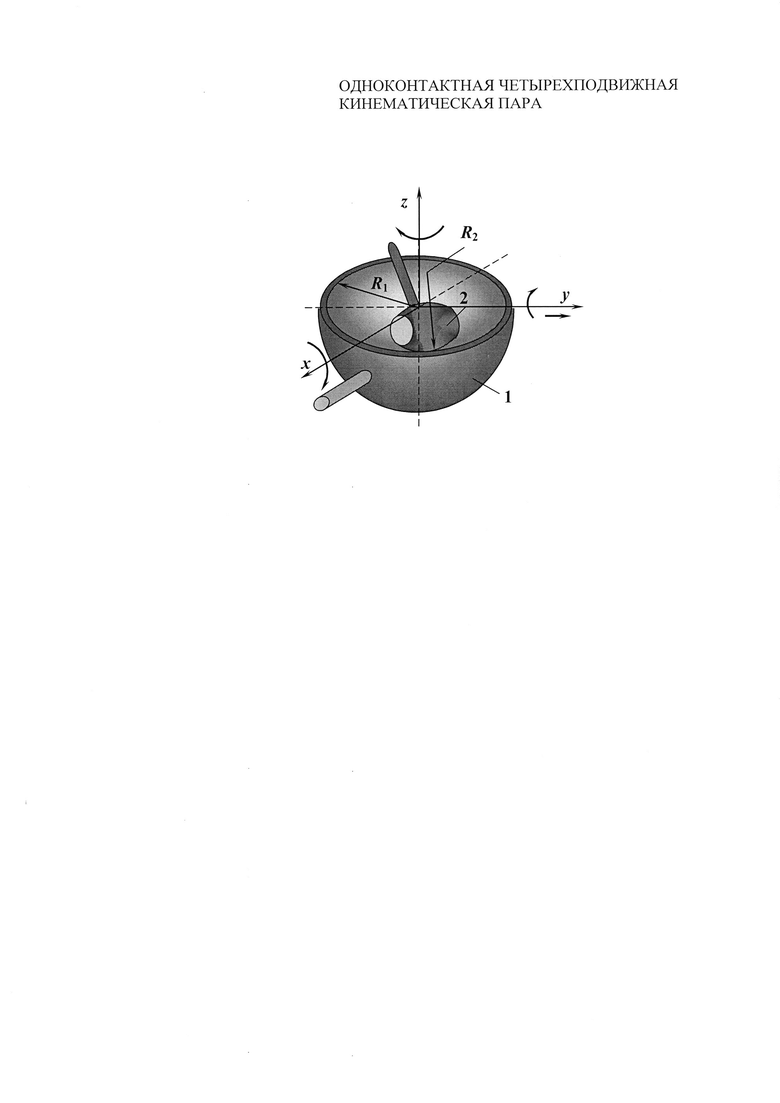
На чертеже изображена предлагаемая кинематическая пара.
Одноконтактная четырехподвижная кинаматическая пара содержит опорное звено 1 в виде лунки постоянной отрицательной гауссовой кривизны R1 и воздействующее звено 2 в виде круговой бочки, образующая которой является дугой окружности с радиусом R2, и соприкасающиеся между собой по линии радиуса R2, равным по абсолютной величине радиусу лунки R1.
Положительный эффект предлагаемой кинематической пары заключается в том, что по одной из трех осей декартовой системы координат в ней может осуществляться относительное поступательное движение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДНОКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2018 |
|
RU2681467C1 |
| ДВУХПОДВИЖНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2021 |
|
RU2755441C1 |
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2578809C2 |
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2014 |
|
RU2564788C2 |
| УДЕРЖИВАЮЩАЯ ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2012 |
|
RU2502898C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПЯТИКОНТАКТНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137965C1 |
| ДВУХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137964C1 |
| Трехзвенное кинематическое соединение с тремя относительными движениями | 2015 |
|
RU2610239C1 |
| ТРЕХКОНТАКТНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2001 |
|
RU2215213C2 |
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2241880C1 |
Изобретение относится к машиностроению, в частности к шарнирным соединениям деталей машин. Одноконтактная четырехподвижная кинематическая пара состоит из соединения опорного звена и воздействующего звена. Опорное звено выполнено в виде лунки постоянной отрицательной гауссовой кривизны. Воздействующее звено выполнено в виде круговой бочки, образующая которой является дугой окружности с радиусом, по абсолютной величине равным радиусу кривизны опорного звена. Технический результат: реализация возможности при трех относительных вращательных движениях обеспечить одно относительное поступательное движение звеньев. 1 ил.
Одноконтактная четырехподвижная кинематическая пара, состоящая из соединения опорного звена и воздействующего звена, отличающаяся тем, что опорное звено выполнено в виде лунки постоянной отрицательной гауссовой кривизны, а воздействующее звено выполнено в виде круговой бочки, образующая которой является дугой окружности с радиусом, по абсолютной величине равным радиусу кривизны опорного звена.
| RU 2003124177 A, 10.02.2005 | |||
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2578809C2 |
| Шарнирное соединение | 1990 |
|
SU1788351A1 |
| US 2003412 A1, 29.10.1932 | |||
| Гидравлический домкрат | 1979 |
|
SU840015A1 |

