Изобретение относится к машиностроению и может использоваться для соединения звеньев механизмов.
Известно, что любая механическая система (механизм, машина) состоит из звеньев и соединений звеньев, а соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой [1, с.20, 5-й абзац сверху]. Часть звена, которой оно взаимодействует с другим звеном, называется геометрическим элементом звена.
Известна цилиндрическая двухподвижная кинематическая пара [2, стр.62, табл.9], включающая два звена с геометрическими элементами в виде охватываемой и охватывающей поверхностей. Такая пара имеет комплекс относительных движений ВП, определяющий вращательное и поступательное движения относительно одной общей оси. Недостатком этой пары является невозможность воспроизведения дополнительного поступательного движения вдоль одной из двух оставшихся свободных осей координат.
Наиболее близкой к заявляемой кинематической паре является трехподвижная пара, обеспечивающая комплекс движений ВПП [2, стр.62, табл.9], принимаемая за прототип. Пара образуется двумя звеньями с геометрическими элементами в виде цилиндрических поверхностей, входящих в линейчатый контакт. В этой кинематической паре обеспечиваются относительные вращательное и поступательное движения вокруг и вдоль одной общей оси и поступательное движение вдоль другой оси. При этом соприкасающиеся цилиндры могут быть выполнены с замкнутой направляющей любой формы [3, стр.188, рис.2.47].
Недостатком прототипа является то обстоятельство, что ни одна из поверхностей его звеньев не является охватывающей, поэтому такая пара не может быть выполнена удерживающей, то есть звенья свободно могут разомкнуться между собой. Это ограничивает применение такой пары при создании конструкций механизмов.
Задачей изобретения является создание удерживающей кинематической пары, в которой одно звено было бы выполнено с геометрическим элементом в виде охватываемой поверхности, а второе в виде охватывающей, чтобы при этом заявляемая кинематическая пара обеспечивала требуемый комплекс движений (ВПП).
Сущность заявляемого устройства заключается в том, что предлагается трехподвижная кинематическая пара, включающая два звена с геометрическими элементами в виде цилиндрических поверхностей, входящих в линейчатый контакт, при этом цилиндрические поверхности геометрических элементов звеньев выполнены в виде охватываемой и охватывающей поверхностей, при этом охватываемая поверхность первого звена выполнена в виде прямого кругового цилиндра заданного диаметра, а охватывающая его поверхность второго звена представляет собой сквозной криволинейный паз, определяемый высотой, шириной и длиной, причем высота паза принимается равной диаметру цилиндра первого звена, а длина паза меньшей длины цилиндра.
На чертеже показана трехподвижная кинематическая пара между звеньями 1 и 2, входящими между собой в линейчатый контакт. Геометрические элементы звеньев пары выполняются в виде охватываемой (звено 1) и охватывающей (звено 2) поверхностей, взаимодействующих между собой. Охватываемая поверхность звена 1 принимается в виде прямого кругового цилиндра с диаметром d и длиной l1, а охватывающая поверхность звена 2 выполняется в виде сквозного замкнутого криволинейного паза шириной S, длиной l2 и высотой h. При этом высота паза принимается равной диаметру d цилиндра l (h=d), а длина цилиндра l1 - большей длины паза l2 (l1>l2). Под пазом согласно [4, стр.437] понимается углубление в детали прямоугольного, трапецеидального или иного поперечного сечения, служащего для размещения шпонки, ролика, толкателя и т.п.
Относительное движение звеньев может быть рассмотрено в декартовой системе координат xyz. В направлении оси x звено 7 относительно звена 2 может двигаться поступательно (движение П) и поворачиваться - вращаться (движение В), то есть иметь движение ВП. В направлении оси у звену 1 обеспечивается лишь поступательное движение П. Относительный поворот звеньев 1 и 2 вокруг оси y невозможен в силу контакта их поверхностей по линии l2 . Относительные движения звеньев вдоль и вокруг оси z невозможны в связи с замкнутостью контактов и выполнения паза криволинейным. Лишь при выполнении паза в звене 2 прямолинейным мог бы появиться относительный поворот звеньев вокруг оси z. Именно исполнение паза криволинейным исключает такой поворот и предлагаемая кинематическая пара становится трехподвижной (ВПП). При этом неизбежное смещение звена 1 вдоль оси z является зависимым и может быть всегда учтено через кривизну паза.
Трехподвижная кинематическая пара работает следующим образом. Задавая в пространстве xyz движение звену 1 с геометрическим элементом в виде цилиндра, охватываемого поверхностью паза звена 2, последнее (звено 2) получает относительно звена 1 три независимых движения - вращательное и поступательное вокруг и вдоль оси и поступательное вдоль оси у. Невозможными относительными движениями в предлагаемой кинематической паре оказываются вращательное и поступательное относительно оси z и вращательное вокруг оси у. Таким образом, заявляемая кинематическая пара обеспечивает три относительных движения.
Использованные источники
1. Артоболевский И.И. Теория механизмов. Изд-во «Наука», Гл. ред. физ.-мат.лит., 1965, 776 с.
2. Дворников Л.Т., Живаго Э.Я. Основы теории кинематических пар. Новокузнецк, 1999. - 105 с.
3. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. 13-е изд., исправленное. М.: Наука. Главная редакция физико-математичекой литературы, 1986. - 544 с.
4. Крайнев А.Ф. Механика машин. Фундаментальный словарь. М.: Машиностроение, 2000. - 904 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2534095C1 |
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2578809C2 |
| ДВУХПОДВИЖНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2021 |
|
RU2755441C1 |
| Трехзвенное кинематическое соединение с тремя относительными движениями | 2015 |
|
RU2610239C1 |
| УДЕРЖИВАЮЩАЯ ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2012 |
|
RU2502898C1 |
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2014 |
|
RU2564788C2 |
| Привод режущего аппарата | 1990 |
|
SU1762788A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| ДВУХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137964C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЁХПОДВИЖНЫМ ПРИВОДОМ | 2015 |
|
RU2595100C1 |
Изобретение относится к машиностроению и может использоваться для соединения звеньев механизмов. Трехподвижная кинематическая пара включает в себя два звена (1 и 2) с геометрическими элементами в виде цилиндрических поверхностей, входящих в линейчатый контакт. Геометрические элементы пары выполнены в виде охватываемой и охватывающей поверхностей, взаимодействующих между собой. Охватываемая поверхность звена (1) выполнена в виде прямого кругового цилиндра заданного диаметра, а охватывающая поверхность второго звена (2) представляет собой сквозной криволинейный паз. Высота паза принимается равной диаметру цилиндра первого звена, а длина паза меньшей длины цилиндра. Технический результат - обеспечение требуемого комплекса движений. 1 ил.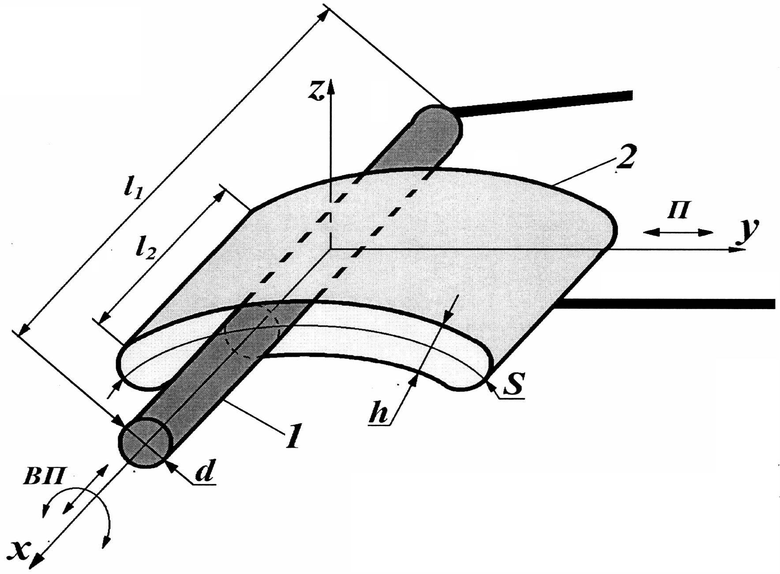
Трехподвижная кинематическая пара, включающая два звена с геометрическими элементами в виде цилиндрических поверхностей, входящих в линейчатый контакт, отличающаяся тем, что цилиндрические поверхности геометрических элементов звеньев выполнены в виде охватываемой и охватывающей поверхностей, при этом охватываемая поверхность первого звена выполнена в виде прямого кругового цилиндра заданного диаметра, а охватывающая его поверхность второго звена представляет собой сквозной криволинейный паз, определяемый высотой, шириной и длиной, причем высота паза принимается равной диаметру цилиндра первого звена, а длина паза меньшей длины цилиндра.
| Дворников Л.Т | |||
| "Основы теории кинематических пар" | |||
| " Н., "Сибирский государственный индустриальный университет", 1999 | |||
| Артоболевский И.И | |||
| "Механизмы в современной технике" | |||
| " М., "Наука", 1979 | |||
| ПРОСТРАНСТВЕННЫЙ КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ ВТОРОГО СЕМЕЙСТВА | 2010 |
|
RU2422703C1 |
| US 2005193842 A1, 08.09.2005 | |||

