Изобретение относится к машиностроению и может использоваться для соединения звеньев механизмов.
Известно [1, с.20, 3-ий и 4-ый абзацы сверху], что любая механическая система (механизм, машина) состоит из звеньев и соединений звеньев, а соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой.
Известна двухподвижная цилиндрическая кинематическая пара [1, стр.57, рис.95], образованная связью цилиндр-желоб, являющаяся удерживающей (при выполнении желоба закрытым). Такая пара имеет комплекс относительных движений ВП, определяющий вращательное и поступательное движения относительно одной общей оси. Недостатком этой пары является невозможность воспроизведения дополнительного вращательного движения относительно одной из двух оставшихся свободных осей координат.
Наиболее близкой к заявляемой кинематической паре является трехподвижная пара, обеспечивающая комплекс движений ВПВ [2, стр.62, табл.9], принимаемая за прототип. Эта пара образуется связью цилиндр-корсет, когда кривизна цилиндра равна кривизне вогнутости корсета, при выполнении цилиндра прямым круговым [2, стр.58, рис.31а]. В этой паре обеспечиваются вращательное и поступательное движения относительно одной из осей и вращательное движение вокруг второй оси.
Недостатком прототипа является то обстоятельство, что эта пара не является удерживающей, то есть цилиндр свободно может разомкнуться с корсетом. Это ограничивает применение такой пары при создании конструкций механизмов.
Задачей изобретения является создание удерживающей кинематической пары, обеспечивающей требуемый комплекс движений (ВПВ).
Сущность заявляемого устройства заключается в том, что предлагается удерживающая трехподвижная кинематическая пара, включающая в свой состав два звена - цилиндр и корсет, и обеспечивающая три относительных движения между звеньями, при этом корсет выполнен двойным, соприкасающимся с поверхностью цилиндра в двух точках, а радиус кривизны образующей вогнутой поверхности корсета на всем возможном участке ее соприкосновения с цилиндром обеспечивается меньшим, чем удвоенный радиус цилиндра.
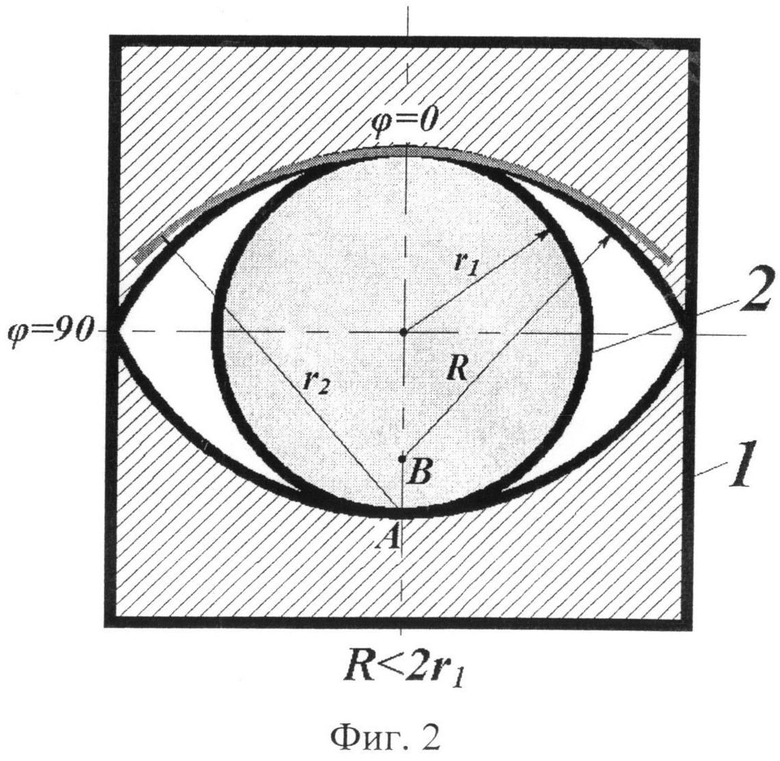
На фиг.1 показана удерживающая трехподвижная кинематическая пара. Пара состоит из корсета 7 и цилиндра 2. Корсет 1 выполнен двойным, соприкасающимся с поверхностью цилиндра 2 в двух точках. На фиг.2 показана геометрия кинематической пары. Особым условием в этой паре является такое, при котором радиус-вектор R был бы во всех точках от φ=0 до φ=90 менее радиус-вектора r2=2r1 (R<2r1). При этом условии цилиндр 2 не сможет поворачиваться относительно точки А, то есть не будет иметь дополнительной подвижности. Корсет 1 выполняется с вогнутой поверхностью по дуге окружности относительно точки В.
Удерживающая трехподвижная кинематическая пара работает следующим образом. Задавая движение цилиндру 2, удерживаемому корсетом 1, выполненным двойным, относительно оси y будет обеспечено одновременно два движения - вращательное и поступательное, а относительно оси z - только вращательное. Запрещенными движениями в этой паре оказываются оба движения относительно оси х и поступательное движение вдоль оси z. Таким образом, удерживающая трехподвижная кинематическая пара обеспечивает три относительных движения.
Использованные источники
1. Артоболевский И.И. Теория механизмов. Изд-во «Наука», Гл. ред. физ.-мат. лит., 1965, 776 с.
2. Дворников Л.Т., Живаго Э.Я. Основы теории кинематических пар. Новокузнецк, 1999. - 105 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2014 |
|
RU2564788C2 |
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2578809C2 |
| ТРЕХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2012 |
|
RU2520624C2 |
| ДВУХПОДВИЖНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2021 |
|
RU2755441C1 |
| ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2013 |
|
RU2534095C1 |
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2241880C1 |
| Трехзвенное кинематическое соединение с тремя относительными движениями | 2015 |
|
RU2610239C1 |
| ОДНОКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2018 |
|
RU2681467C1 |
| МНОГОКРАТНЫЙ ШАРНИРНЫЙ ПАРАЛЛЕЛОГРАММ | 2006 |
|
RU2331805C1 |
| Стопорный механизм | 1990 |
|
SU1803633A1 |
Изобретение относится к машиностроению и может использоваться для соединения звеньев механизмов. Удерживающая трехподвижная кинематическая пара состоит из двух звеньев - корсет (1) и цилиндр (2), и обеспечивает три относительных движения между звеньями. Корсет (1) выполнен двойным, соприкасающимся с поверхностью цилиндра (2) в двух точках. Радиус кривизны образующей вогнутой поверхности корсета (1) на всем возможном участке ее соприкосновения с цилиндром (2) обеспечивается меньшим, чем удвоенный радиус цилиндра (2). Технический результат: создание удерживающей кинематической пары, обеспечивающей требуемый комплекс движений (ВПВ). 2 ил.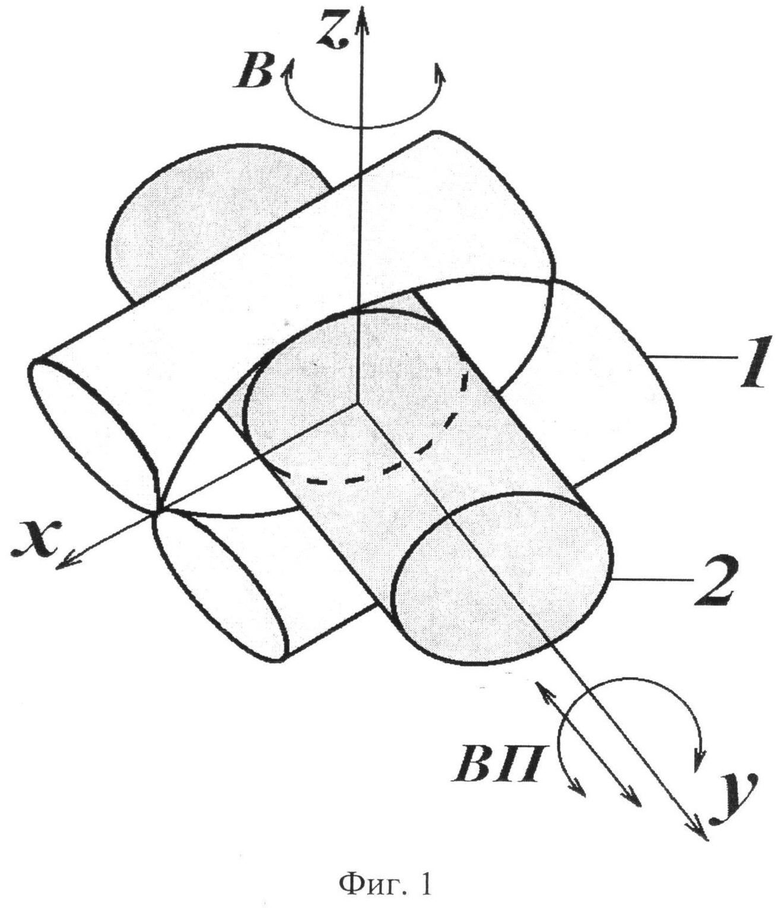
Удерживающая трехподвижная кинематическая пара, включающая в свой состав два звена - цилиндр и корсет и обеспечивающая три относительных движения между звеньями, отличающаяся тем, что корсет выполнен двойным, соприкасающимся с поверхностью цилиндра в двух точках, а радиус кривизны образующей вогнутой поверхности корсета на всем возможном участке ее соприкосновения с цилиндром обеспечивается меньшим, чем удвоенный радиус цилиндра.
| Дворников Л.Т., Живаго Э.Я | |||
| Основы теории кинематических пар | |||
| - Новокузнецк, 1999, с.62, табл.9 | |||
| ТРЕХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 2003 |
|
RU2241880C1 |
| МАЯТНИКОВАЯ СКОЛЬЗЯЩАЯ ОПОРА | 2006 |
|
RU2435080C2 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПЯТИКОНТАКТНАЯ ВРАЩАТЕЛЬНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137965C1 |
| ДВУХКОНТАКТНАЯ ДВУХПОДВИЖНАЯ КИНЕМАТИЧЕСКАЯ ПАРА | 1998 |
|
RU2137964C1 |
| JP 2011163504 A, 25.08.2011. | |||

