Изобретение относится к космической технике, более конкретно - к системам навигации (СН) искусственных спутников Земли (ИСЗ), для которых ошибки определения параметров движения центра масс (ПДЦМ) на интервале прогнозирования обусловлены главным образом неточностью знания начальных параметров движения спутника.
Рассматриваемые СН ИСЗ реализуют две основные процедуры: уточнение (определение) по результатам траекторных измерений положения и скорости ИСЗ на определенный (начальный) момент времени tут и прогнозирование их на требуемое время tпр.
Используемая при прогнозировании модель движения, например для низколетящих (с высотой орбиты в диапазоне 200-1500 км) ИСЗ, включает, как правило, силы от гравитационного поля Земли и силы от аэродинамического воздействия верхней атмосферы. Если модель движения имеет высокую точность, то ошибки прогнозируемых параметров движения ИСЗ будут зависеть в основном от точности определения начальных ПДЦМ (далее - НУ). Следовательно, в этом случае необходимо использовать по возможности максимально точные значения этих НУ.
В качестве прототипа выбрана бортовая СН ИСЗ [Методы обеспечения живучести низкоорбитальных автоматических КА зондирования Земли: математическое моделирование, компьютерные технологии. / А.Н. Кирилин, Р.Н. Ахметов, А.В. Соллогуб, В.П. Макаров. М.: Машиностроение, 2010], содержащая устройство управления системой, устройство преобразования навигационных сигналов (НС) в навигационные параметры (НП), блок преобразования НП в начальные ПДЦМ ИСЗ и блок прогнозирования ПДЦМ.
В известной СН используют модель движения ИСЗ, включающей гравитационное поле Земли с полным набором гармоник до 16-го порядка включительно (16×16) и плотность атмосферы по ГОСТ 4401-81. В наземном комплексе управления для увеличения точности прогнозирования ПДЦМ спутника уточняют величину S=Sб(1+Δρ/ρ) (Sб - баллистический коэффициент, Δρ - отклонение фактической плотности атмосферы от принятой ρ по ГОСТу), входящую множителем в выражение силы от аэродинамического воздействия. Значение этого параметра как коэффициента согласования расчетного движения ИСЗ с действительным на некотором (примерно одни сутки) интервале передают в бортовой комплекс управления.
При полете выше примерно 500-600 км влияние на прогнозируемое движение ИСЗ от неопределенности атмосферного возмущения становится незначительным и может быть меньше, чем от неточности знания НУ.
Недостаток прототипа состоит в том, что при достаточно полном учете возмущающих сил и заметном отличии значений используемых НУ от фактических, возможны существенные ошибки прогнозирования ПДЦМ ИСЗ, особенно на больших временных промежутках [tут, tпр].
Задача изобретения состоит в увеличении точности прогнозирования ПДЦМ спутника.
Поставленная задача решается благодаря тому, что в известной СН ИСЗ, содержащей устройство управления системой и соединенные с ним устройство преобразования НС в НП, блок преобразования НП в начальные ПДЦМ ИСЗ и блок прогнозирования ПДЦМ, предусмотрены следующие отличия: в систему введены блок определения ошибок прогнозирования ПДЦМ на предыдущем участке (полета), блок расчета начальных отклонений ПДЦМ на предыдущем участке и блок коррекции начальных ПДЦМ на текущем участке.
Здесь и далее: «текущий участок» - отрезок времени, ограниченный слева временем последних НУ, а справа временем спрогнозированных ПДЦМ спутника; «предыдущий участок» - предшествующий текущему участку отрезок времени, ограниченный временами двух последних НУ.
Техническая сущность предложенного устройства поясняется графическими материалами:
фиг. 1 - структурная схема СН ИСЗ;
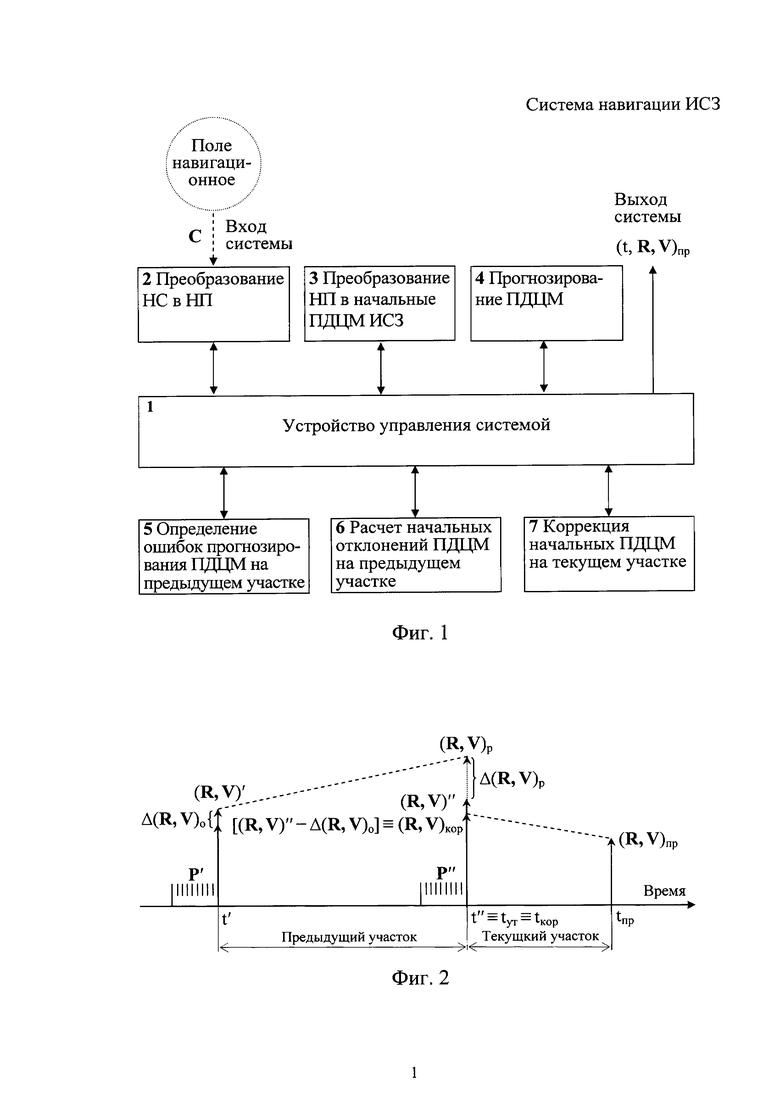
фиг. 2 - временная диаграмма, облегчающая понимание используемых зависимостей.
Предложенная СН ИСЗ (см. фиг. 1) содержит устройство 1 управления системой, устройство 2 преобразования НС в НП, блок 3 преобразования НП в начальные ПДЦМ ИСЗ и блок 4 прогнозирования ПДЦМ, при этом устройство 1 соединено с устройством 2 и блоками 3, 4.
Также СН содержит (в отличие от прототипа) блок 5 определения ошибок прогнозирования ПДЦМ на предыдущем участке, блок 6 расчета начальных отклонений ПДЦМ на предыдущем участке и блок 7 коррекции начальных ПДЦМ на текущем участке, причем устройство 1 соединено с блоками 5, 6 и 7.
Здесь устройство 1 управления системой включает обычные элементы электронной вычислительной машины: собственно устройство управления, память, процессор, устройства ввода-вывода и программное обеспечение. Устройство 2 содержит датчики и преобразующее устройство. Блоки 3-7 представляют собой области постоянной памяти, имеющие определенную структуру (конструкцию) и обеспечивающие реализацию используемых аналитических зависимостей.
Система навигации ИСЗ, согласно изобретению, работает следующим образом (см. фиг. 2).
Устройство 1 управления системой задает устройству 2 для текущего участка время начала и конца навигационных измерений. Сигналы С'' от навигационного поля (например, радиосигналы от навигационных спутников) принимаются этим устройством, преобразуются в навигационные параметры Р'' (например, радиальную дальность D и скорость  изменения радиальной дальности относительно навигационных спутников) и выдаются в устройство 1.
изменения радиальной дальности относительно навигационных спутников) и выдаются в устройство 1.
По завершении измерений устройство 1 подключает блок 3 для преобразования НП в начальные ПДЦМ спутника на текущем участке:

где K - общее число измерений;
t - время;
R=(X, Y, Z), V=(Vx, Vy, Vz) - вектор положения и вектор скорости центра масс ИСЗ (с компонентами в некоторой системе координат).
Далее подключается блок 5 для определения относительно начальных параметров движения (R, V)'' ошибок спрогнозированных на время t''≡tут параметров движения (R, V)p - по начальным ПДЦМ (t, R, V)' предыдущего участка:
(t, R, V)'→(t, R,V)p;
Δ(R, V)p=(R, V)p -(R, V)''.
В блоке 6 по ошибкам Δ(R, V)p рассчитываются начальные отклонения параметров движения Δ(R, V)o на предыдущем участке (решается обратная задача). Если орбиты круговые или почти круговые (эксцентриситет не превышает 0,02 при среднем радиусе орбиты не более 10 000 км), то можно использовать аналитические зависимости [Эльясберг П.Е. Введение в теорию полета искусственных спутников Земли. М.: Наука, 1965]. Разрешая приведенные в этом источнике уравнения (2.17) и (2.18) относительно НУ, получим выражения (в цилиндрической системе координат)
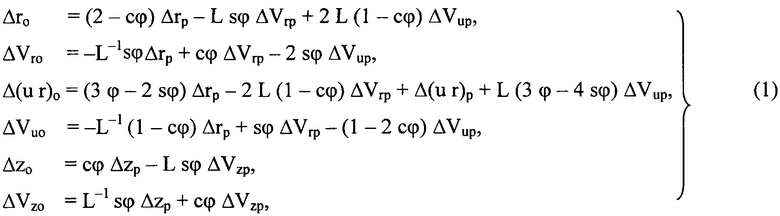
где сϕ=cos ϕ, sϕ=sin ϕ;
ϕ=2π(t''-t')/TC, рад;
t'', t' - время привязки НУ на текущем и предыдущем участках, с;
 - сидерический период обращения, с;
- сидерический период обращения, с;
μ=3,98602⋅105 км3/с2 - геоцентрическая гравитационная постоянная;
ε=2,634⋅1010 км5/с2 - константа, характеризующая гравитационное поле Земли;
а - большая полуось орбиты, км;
i - наклонение, рад;
е - эксцентриситет;
ω - аргумент перигея, рад;
L=TC/2π, с.
Оскулирующие элементы a, i, е, ω соответствуют спрогнозированным на время t'' параметрам (R, V)p (см. выше).
Чтобы воспользоваться этими зависимостями, необходимо предварительно перейти от ГСК (в которой записаны уравнения движения - для низколетящих ИСЗ) к ЦСК (в которой приведены выражения (1)):

Здесь ГСК, ИСК, ОСК и ЦСК - соответственно гринвичская, инерциальная, орбитальная и цилиндрическая системы координат.
После этого следует провести преобразование по формулам (1):

И затем перейти обратно от ЦСК к ГСК:

При завершении работы блока 6 устройство 1 подключает блок 7 для коррекции НУ на текущем участке:
(R, V)'' → [(R, V)'' - Δ(R, V)о=(R, V)кор].
Окончательно, в блоке 4 откорректированные НУ используется для прогнозирования ПДЦМ спутника на заданный момент времени tпр:
(t, R, V)кор → (t, R, V)пр,
которые СН выдает в другие системы, например в систему управления движением ИСЗ.
Предложенная СН ИСЗ обладает следующим техническим преимуществам перед прототипом: система с меньшими ошибками прогнозирует ПДЦМ спутника благодаря возможности использовать более точные НУ.
Оценочные расчеты для одного из ИСЗ (параметры орбиты: а ≈ 7000 км, е ≈ 0,001) с использованием в наземном комплексе управления 16-ти НУ (каждый из которых был получен после вторичной обработки нескольких ПДЦМ, определенных в бортовом комплексе управления) на интервалах прогнозирования примерно одни сутки между соседними НУ (1-2, 2-3, …, 15-16) показали, что предлагаемое техническое решение (TP) позволит заметно улучшить прогноз положения и скорости ИСЗ. Результаты расчетов для этого случая приведены в таблице 1.

| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ СИСТЕМА НАВИГАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2013 |
|
RU2575302C2 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2277696C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПРИ НАВИГАЦИОННЫХ ИЗМЕРЕНИЯХ | 2012 |
|
RU2529016C1 |
| СПОСОБ НАВИГАЦИОННЫХ АСТРОНОМИЧЕСКИХ ИЗМЕРЕНИЙ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2016 |
|
RU2623667C1 |
| СПОСОБ КОСМИЧЕСКОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378617C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| СПОСОБ И СИСТЕМА КОСМИЧЕСКОЙ НАВИГАЦИИ | 2014 |
|
RU2568937C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ ПО ИЗМЕРЕНИЯМ ТЕКУЩИХ НАВИГАЦИОННЫХ ПАРАМЕТРОВ НА КОРОТКОМ МЕРНОМ ИНТЕРВАЛЕ | 2011 |
|
RU2498219C2 |
| СПОСОБ И УСТРОЙСТВО ОБРАБОТКИ НАВИГАЦИОННЫХ СИГНАЛОВ И ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ДОЛГОСРОЧНОЙ КОМПАКТНОЙ ЭФЕМЕРИДНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2550814C2 |
Изобретение относится к космической технике, более конкретно к системам навигации искусственных спутников Земли (ИСЗ). Система навигации ИСЗ содержит устройство управления системой и соединенные с ним устройство преобразования навигационных сигналов в навигационные параметры, блок преобразования навигационных параметров в начальные параметры движения центра масс (ПДЦМ) ИСЗ и блок прогнозирования ПДЦМ. При этом в систему навигации ИСЗ включены соединенные с устройством управления системой блок определения ошибок прогнозирования ПДЦМ на предыдущем участке, блок расчета начальных отклонений ПДЦМ на предыдущем участке и блок коррекции начальных ПДЦМ на текущем участке. Блок расчета начальных ПДЦМ на предыдущем участке в случае круговых или почти круговых орбит имеет структуру, реализующую аналитические зависимости этих отклонений от ошибок прогнозирования ПДЦМ ИСЗ на предыдущем участке. Техническим результатом изобретения является увеличение точности прогнозирования ПДЦМ спутника. 1 табл., 2 ил.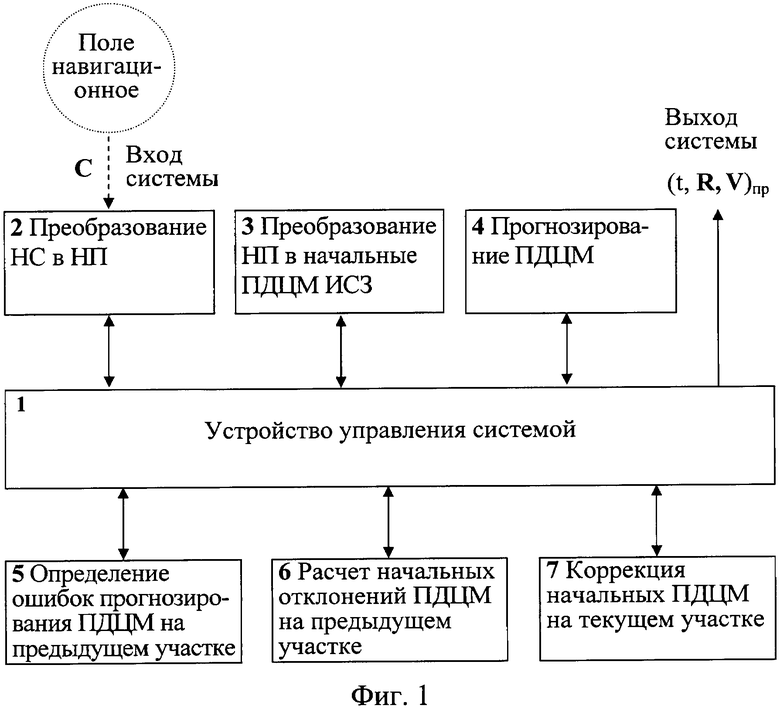
Система навигации искусственного спутника Земли (ИСЗ), содержащая устройство управления системой и соединенные с ним устройство преобразования навигационных сигналов в навигационные параметры, блок преобразования навигационных параметров в начальные параметры движения центра масс (ПДЦМ) ИСЗ и блок прогнозирования ПДЦМ, отличающаяся тем, что в систему навигации включены соединенные с устройством управления системой блок определения ошибок прогнозирования ПДЦМ на предыдущем участке, блок расчета начальных отклонений ПДЦМ на предыдущем участке и блок коррекции начальных ПДЦМ на текущем участке, при этом блок расчета начальных отклонений ПДЦМ на предыдущем участке в случае круговых или почти круговых орбит имеет структуру, реализующую аналитические зависимости этих отклонений от ошибок прогнозирования ПДЦМ ИСЗ на предыдущем участке.
| БОРТОВАЯ СИСТЕМА НАВИГАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2013 |
|
RU2575302C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ ПО ИЗМЕРЕНИЯМ ТЕКУЩИХ НАВИГАЦИОННЫХ ПАРАМЕТРОВ НА КОРОТКОМ МЕРНОМ ИНТЕРВАЛЕ | 2011 |
|
RU2498219C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 1998 |
|
RU2159201C2 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| US 8838297 B2, 16.09.2014. | |||

