Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к устройству и способам нанесения ленты на полотно, а более конкретно - к устройству и способу нанесения ленты по нелинейному шаблону на движущееся полотно.
Уровень техники
Впитывающие изделия, такие как памперсы разового применения, детские трусы подгузники, изделия, используемые при недержании у взрослых, и аналогичные изделия обычно содержат несколько различных компонентов, которые соединены вместе. Типичные впитывающие изделия содержат внутреннюю подкладку, которая обращена к телу, наружную оболочку, и впитывающий вкладыш, расположенный между подкладкой и наружной оболочкой. Кроме подкладки, наружной оболочки и впитывающего вкладыша типичные впитывающие изделия также включают в себя ряд отдельных компонентов, например, застежки, поясную эластичную ленту (резинку), ножные эластичные ленты (резинки). Эти отдельные компоненты изделия часто крепят к внутренней подкладке и/или наружной оболочке. Например, известно клеевое крепление ножных резинок по криволинейному лекалу к непрерывному полотну материала наружной оболочки или материалу внутренней подкладки.
Однако, известные технологии для нанесения ножных резинок на полотно, движущееся с большой линейной скоростью, часто ограничены величиной смещения (т.е. амплитудой криволинейного профиля), которое может быть получено. Поэтому, ножные резинки в известных впитывающих изделиях, изготовляемых при высоких линейных скоростях, часто прямые или сравнительно прямые. Однако, защищенность от протечек и эстетический вид известных впитывающих изделий могут быть улучшены применением ножных резинок, которые по своей длине обладают значительной кривизной.
Известные попытки нанесения ножных резинок при значительных величинах смещения (т.е. кривизны) на полотно при высокой линейной скорости были безуспешными. Такие попытки приводили к тому, что резинка наносилась со сдвигом относительно шаблона. Более того, отклонение нанесенной резинки от шаблона не всегда было одинаковым.
В результате, желательно создать устройство и способ для точного нанесения ленты по криволинейному профилю на полотно, движущееся с высокой линейной скоростью.
Раскрытие изобретения
Согласно настоящему изобретению в одном его аспекте, устройство для нанесения ленты по криволинейному профилю на полотно в общем содержит направляющий механизм, включающий в себя ролик для задания направления ленте при ее укладке на полотно, когда полотно движется в первом направлении. Предусмотрен механизм, обеспечивающий возвратно-поступательное движение, для перемещения по меньшей мере ролика направляющего механизма в прямом и обратном направлениях вдоль оси перемещения. При этом ось перемещения непараллельна указанному первому направлению.
Согласно настоящему изобретению в другом его аспекте, устройство для нанесения ленты по криволинейному профилю на полотно в общем содержит направляющий механизм, включающий в себя ролик для задания направления ленте при ее укладке на полотно, когда полотно движется в первом направлении. При этом с направляющим механизмом функционально связан кривошипно-ползунный механизм с целью сообщить возвратно-поступательное движение по меньшей мере ролику направляющего механизма, так чтобы указанный ролик можно было перемещать в прямом и обратном направлениях относительно полотна, когда ролик направляет ленту на полотно.
Согласно настоящему изобретению в еще одном его аспекте, предлагается способ нанесения ленты на полотно, содержащий этапы, на которых подают полотно с высокой линейной скоростью в машинном направлении; и направляют ленту на полотно, используя направляющий ролик. При помощи направляющего ролика наносят ленту на полотно по нелинейному шаблону, так чтобы по меньшей мере участок ленты имел радиус кривизны в диапазоне приблизительно 76-254 мм.
Краткое описание чертежей
Фиг.1 в перспективной проекции изображает один вариант осуществления устройства для наклеивания ленты на полотно по нелинейному шаблону.
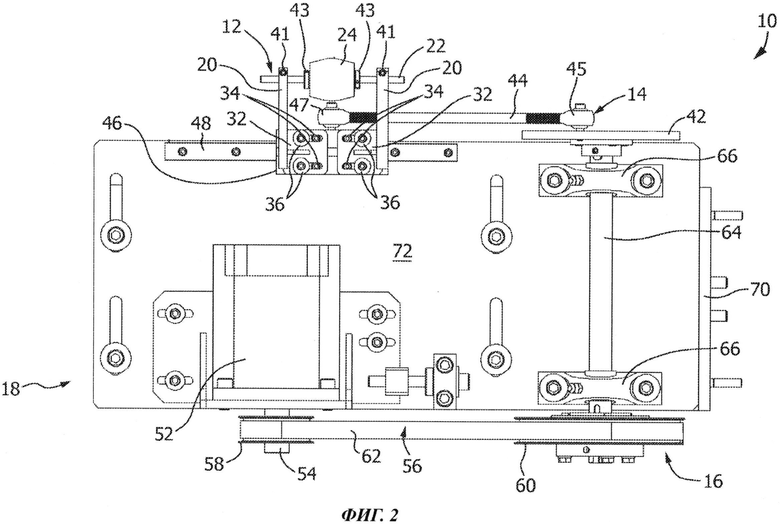
Фиг.2 представляет горизонтальную проекцию указанного устройства.
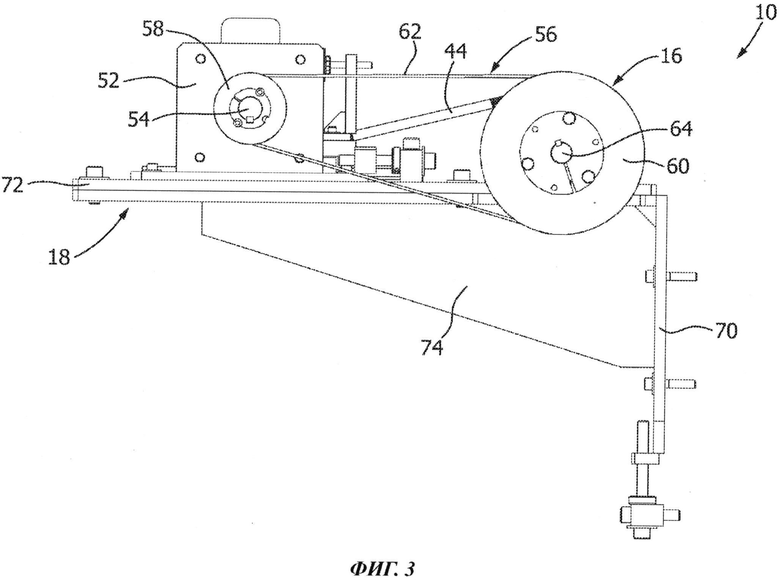
Фиг.3 представляет боковую проекцию указанного устройства на виде справа.
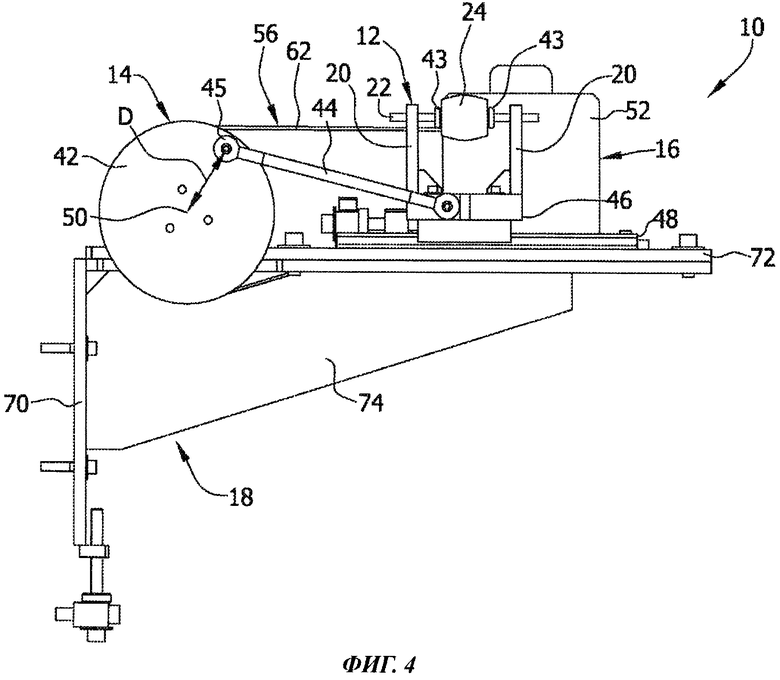
Фиг.4 представляет боковую проекцию указанного устройства на виде слева.
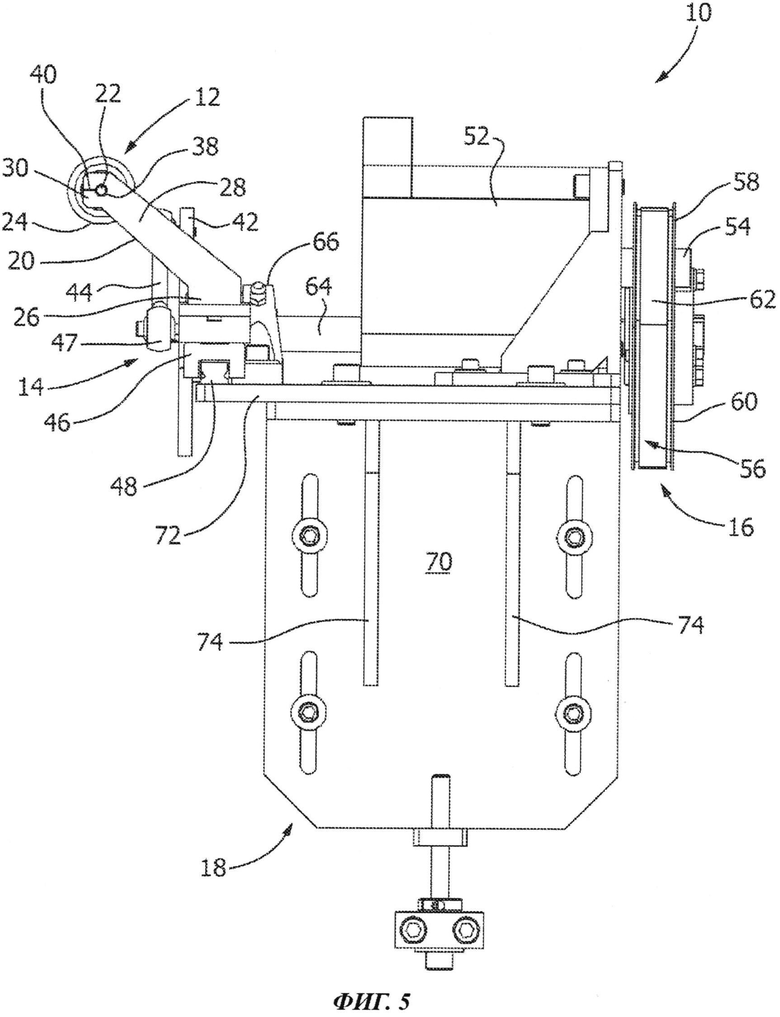
Фиг.5 представляет фронтальную проекцию указанного устройства.
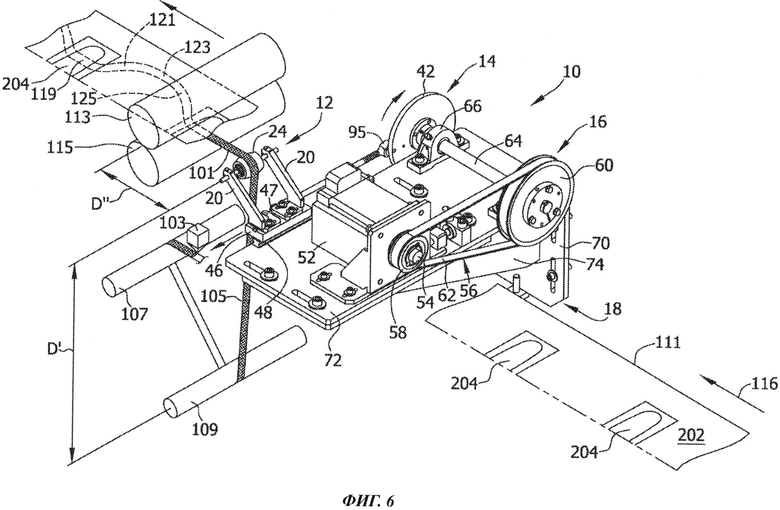
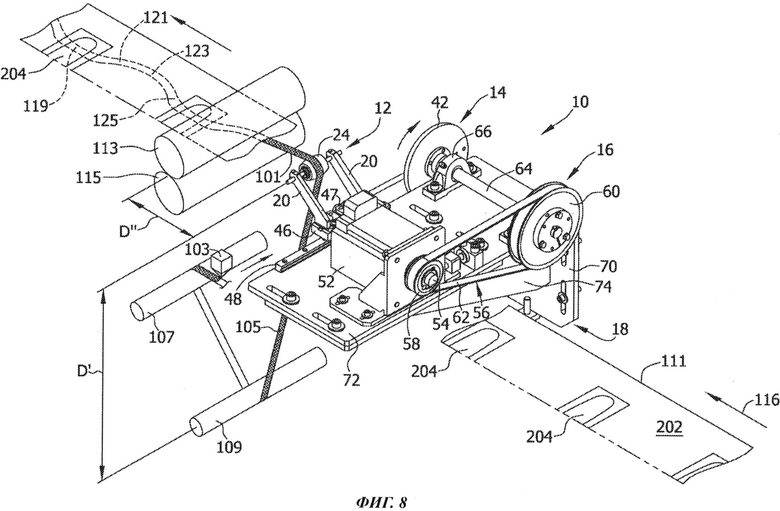
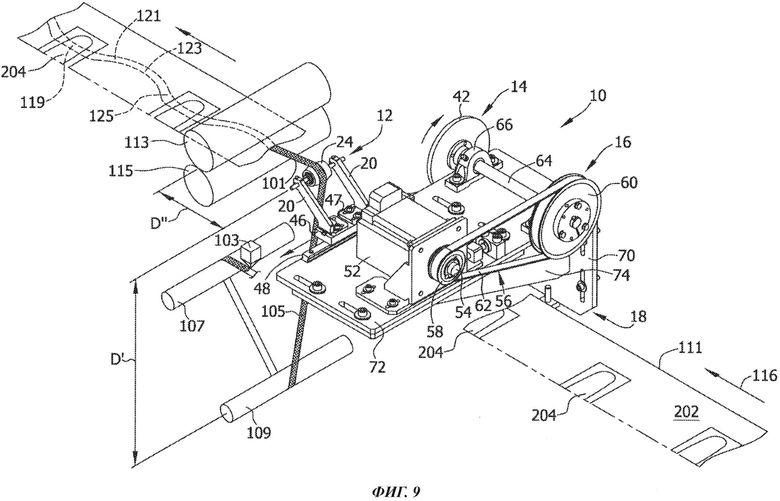
Фиг.6-9 в перспективных проекциях изображают указанное устройство, находящееся в ряде состояний при нанесении ленты на полотно, движущееся с высокой скоростью.
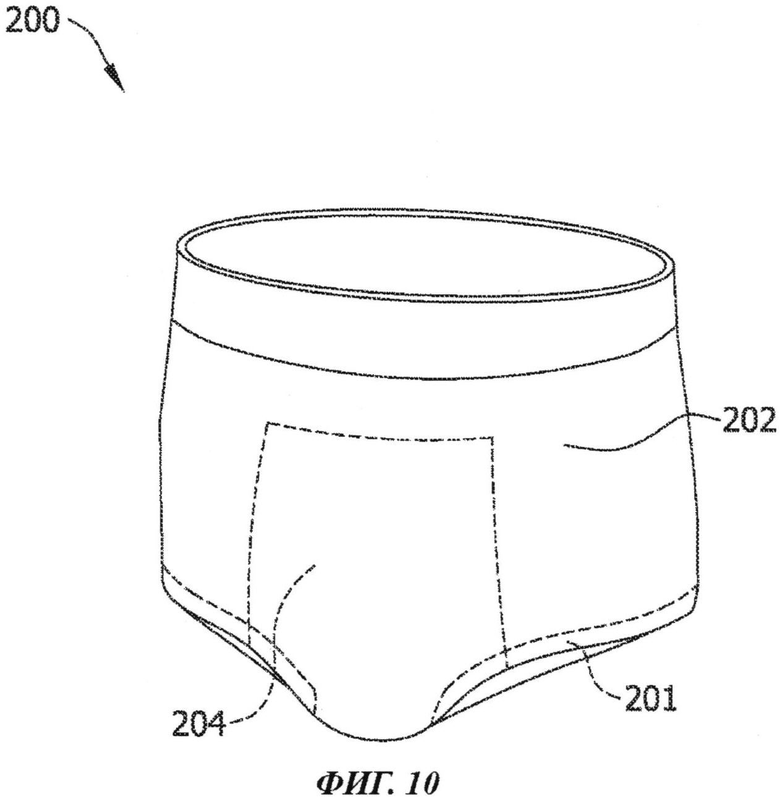
Фиг.10 в перспективной проекции изображает одну конструкцию изделия для ношения при недержании.
Во всех чертежах детали одного функционального назначения обозначены одинаковыми позиционными номерами.
Осуществление изобретения
На фиг.1-5 изображен один подходящий вариант осуществления устройства, в целом обозначенного индексом 10, для нанесения ленты по криволинейному профилю на полотно, движущееся с высокой линейной скоростью. Представленное устройство 10 содержит направляющий механизм 12, кривошипно-ползунный механизм 14, узел 16 привода, и узел 18 платформы. Направляющий механизм, кривошипно-ползунный механизм, узел привода и узел платформы на прилагаемых чертежах обозначены указанными соответствующими номерами.
Направляющий механизм 12 содержит пару расположенных на расстоянии друг от друга несущих коромысел 20, проходящую между коромыслами ось 22 и ролик 24, установленный на указанной оси с возможностью вращения. Каждое из коромысел 20 направляющего механизма 12 содержит основание 26, смонтированное на кривошипно-ползунном механизме 14, промежуточный участок 28, проходящий от основания вверх, и свободный конец 30, выступающий от промежуточного участка наружу (фиг.5). Согласно фиг.2, каждое из оснований 26 содержит установочную лапу 32, в которой имеется пара продолговатых пазов 34. Через каждый из пазов 34 проходит болт 36 для крепления установочной лапы 32, и тем самым соответствующего коромысла 20 к кривошипно-ползунному механизму 14. Следует понимать, что коромысла 20 можно крепить к кривошипно-ползунному механизму 14 другими способами (например, сваркой).
В представленном варианте осуществления промежуток между коромыслами 20 можно выборочно регулировать (увеличивать или уменьшать) путем ослабления болтов 36 и смещения коромысел в требуемом направлении относительно болтов. Как только требуемое относительное положение коромысел 20 будет получено, болты 36 можно снова затянуть, чтобы зафиксировать указанные болты, которые проходят через пазы 34 в установочных лапах 32 коромысел 20, и ввернуты в кривошипно-ползунный механизм 14. Предполагается, что относительное положение коромысел 20 можно фиксировать или регулировать другими способами.
Как видно из фиг.5, промежуточный участок 28 каждого из коромысел 20 наклонен под углом относительно основания 26. В представленном варианте осуществления, например, промежуточный участок 28 наклонен под углом приблизительно 45° относительно основания 26. Из фиг.5 также видно, что свободный конец 30 каждого из коромысел 20 проходит наружу под углом относительно промежуточного участка 28. Относительно промежуточных участков 28 свободные концы 30 наклонены под углом приблизительно 45°. Однако, следует понимать, что промежуточные участки 28 и свободные концы 30 коромысел 20 могут иметь другую ориентацию по сравнению с показанной на фиг.5.
Согласно фиг.5, каждый из свободных концов 30 коромысел 20 содержит отверстие 38 для размещения оси 22, и разрез 40, проходящий между наружным краем свободного конца и отверстием 38. Разрез 40 увеличивает гибкость коромысла, и тем самым помогает вставлять ось 22 в отверстия 38 и вынимать ось из отверстий 38. Для фиксации оси 22 в коромыслах 20, в каждом из свободных концов предусмотрен крепежный винт 41 (фиг.2). Крепежные винты 41 проходят через разрез 40, чтобы тем самым блокировать изгиб коромысла 20, когда крепежный винт затягивают на месте. Предполагается, что разрез 40 и крепежный винт 41 в каждом из коромысел 20 могут быть опущены.
Согласно фиг.1 и 2, ось 22 представляет собой продолговатый цилиндрический стержень, проходящий через отверстие 38 в каждом из коромысел 20. Ось 22 в представленном варианте осуществления поддерживается коромыслами 20 в неподвижном состоянии. То есть, ось 22 не может вращаться относительно коромысел 20. Однако, предполагается, что в других вариантах осуществления устройства 10 ось 22 может быть выполнена с возможностью вращения относительно коромысел 20.
Ось 22 имеет длину, которая позволяет коромысла 20 отодвигать еще дальше друг от друга. То есть коромысла 20 можно раздвигать, и при этом ось 22 не придется заменять на более длинную. Таким образом, в представленном варианте осуществления ось 22 выступает наружу за пределы коромысел 20, но следует понимать, что концы оси могут располагаться заподлицо с коромыслами или могут заканчиваться внутри отверстий 38 в коромыслах.
Согласно фиг.1 и 2, показанный ролик 24, который с возможностью вращения установлен на оси 22, представляет собой вытянутый усеченный сфероид (т.е. имеет форму подобную усеченному шару). Таким образом, ролик 24 сужается от центра к каждому из его краев. Однако, следует понимать, что в границах идеи и объема изобретения ролик 24 может иметь и другую форму, например, цилиндрическую, бочкообразную, форму песочных часов или другую подходящую форму.
Ролик 24 содержит продольный канал (изображен не очень ясно), чтобы сквозь него могла пройти ось 22. Между роликом 24 и осью 22 расположена пара подшипников 43 для облегчения вращения ролика 24 на оси 22. Предполагается, что в варианте осуществления, в котором ось 22 может вращаться относительно коромысел 20, ролик 24 и ось могут быть выполнены как одно целое.
Как показано на фиг.4, кривошипно-ползунный механизм 14 (в широком смысле «механизм, обеспечивающий возвратно-поступательное движение») содержит колесо 42, шатун 44, закрепленный на одной стороне 45 колеса, и ползун 46, закрепленный на противоположном конце 47 шатуна. Вращение колеса 42 заставляет закрепленный на нем конец 45 шатуна 44 вращаться. Вращение шатуна 44 заставляет ползун 46 совершать возвратно-поступательное движение (например, скользить) вдоль рельса 48. Таким образом, кривошипно-ползунный механизм 14 преобразует вращательное движение (от узла 16 привода) в возвратно-поступательное движение, которое передается направляющему механизму 12. В представленном варианте осуществления колесо 42 в целом имеет форму круга. Однако, предполагается, что колесо 42 может быть эксцентричным (например, эллиптическим), или иметь любую другую подходящую форму. Работа кривошипно-ползунного механизма и взаимосвязь его работы с работой узла 16 привода и направляющего механизма 12 будут более подробно рассмотрены ниже.
Согласно фиг.4, в рассматриваемом варианте осуществления шатун 44 прикреплен (например, болтами) к колесу 42 в точке, которая, как правило, находится рядом с наружным краем колеса. Величина перемещения, которое колесо 42 задает шатуну 44, зависит от расстояния D от шатуна до центра 50 колеса. Чем больше расстояние D между центром 50 колеса и концом 45 шатуна 44, прикрепленного к колесу, тем больше величина возвратно-поступательного перемещения, которое получает ползун 46.
Согласно одному подходящему варианту осуществления, расстояние D можно избирательно изменять, смещая точку, в которой конец 45 шатуна 44 крепится к колесу 42.
В представленном варианте осуществления, кривошипно-ползунный механизм предусмотрен для задания возвратно-поступательного движения направляющему механизму 12. Предполагается, что в других вариантах осуществления, возвратно-поступательное движение направляющему механизму 12 может быть сообщено путем использования других устройств, таких как серводвигатель, кулачковый механизм, кулисный механизм, и ходовой винт.
Согласно фиг.1, узел 16 привода содержит двигатель 52, приводной вал 54, выходящий из двигателя наружу, и ременную передачу, которая обозначена в целом индексом 56, и функционально связана с приводным валом. В представленном варианте осуществления двигатель 52 может вращать приводной вал 54 с различной скоростью, как в направлении по часовой стрелке, так и против часовой стрелки. Предполагается, что в других вариантах осуществления двигатель 52 может вращать приводной вал 54 с одной скоростью и/или только в одном направлении.
Как видно из фиг.1, ременная передача 56 содержит первый шкив 58, установленный на приводном валу 54 для совместного вращения с валом, и второй шкив 60, расположенный на определенном расстоянии от первого шкива. Ремень 62 ременной передачи 56 функционально соединяет первый и второй шкивы 58, 60. Таким образом, вращательное движение, которое двигатель 52 через приводной вал 54 сообщает первому шкиву 58, посредством ремня 62 передается второму шкиву 60.
В представленном варианте осуществления второй шкив 60 имеет существенно больший диаметр, чем первый шкив 58. Однако, следует понимать, что соотношение диаметров первого и второго шкивов 58, 60 может отличаться от изображенного на фиг.1. Например, первый и второй шкивы 58, 60 могли бы иметь по существу одинаковые диаметры, или диаметр первого шкива мог бы быть существенно больше диаметра второго шкива.
Передающий вал 64 узла 16 привода функционально соединяет второй шкив 60 с колесом 42 кривошипно-ползунного механизма 14. Как можно видеть из фиг.2, передающий вал 64 поддерживается парой опор 66. Одна из опор 66 вала расположена вблизи второго шкива 60, а другая опора вала расположена вблизи колеса 42.
Узел 18 платформ в целом имеет L-образную форму и состоит в общем из вертикальной платформы 70 и в общем горизонтальной платформы 72. Для укрепления горизонтальной платформы, между вертикальной платформой 70 и горизонтальной платформой 72 проходит пара кронштейнов 74. Как можно видеть из фиг.1, размер и форма горизонтальной платформы 72 обеспечивают установку на ней направляющего узла 12, кривошипно-ползунного механизма 14 и узла 16 привода. Согласно одному подходящему варианту осуществления, вертикальная платформа 70, горизонтальная платформа 72 и кронштейны 74 выполнены из металлических пластин. Однако, следует понимать, что узел 18 платформ может иметь любую подходящую конструкцию, и может быть выполнен из любого подходящего материала.
В процессе применения устройства ленту 101 (резинку) подают от подходящего источника ленты (не показан), расположенного позади устройства 103 для нанесения клеевого состава, в котором клей 105 наносится на одну сторону ленты (фиг.6). Согласно одному подходящему варианту осуществления, лента 101 представляет собой упругий материал, пригодный для применения в качестве ножных резинок во впитывающем изделии. В качестве примера, одним из подходящих материалом для ленты 101 является трехслойный нетканый полипропиленовый материал, известный как SMS. SMS - аббревиатура для слоев нетканого материала, изготовляемых по технологии Spunbond-Meltblown-Spunbond - в ходе процесса, при котором выстраивают три слоя, которые затем склеивают вместе. Один пример материала SMS описан в патенте США 4041203. Однако, следует понимать, что лента 101 может быть изготовлена из других материалов, в число которых, в границах идеи и объема изобретения, помимо иных возможных, входят тканые материалы, пленки, ламинаты пена/пленка, а также сочетания указанных материалов.
Как можно видеть из фиг.6, ленту 101 подают от устройства 103 для нанесения клеевого состава, расположенного позади первого и второго направляющих роликов 107, 109, к ролику 24 направляющего механизма 12. Ленту 101 подают на ролик 24 с натяжением, которое заставляет ленту растягиваться. Согласно одному подходящему варианту осуществления, натяжение ленты 101 может составлять приблизительно 45,3-453 г на 25,4 мм отклонения ленты в середине межцентрового расстояния. Следует понимать, что сила натяжения, приложенная к ленте, может отличаться от приведенных значений.
Согласно фиг.6, второй направляющий ролик 109 отстоит от ролика 24 направляющего механизма 12 на расстояние D′. Расстояние D′ выбрано так, чтобы обеспечить надлежащую центровку ленты 101 при ее подаче на ролик 24, и исключить скручивание ленты или ее сбивание в пучки при движении ролика 24 относительно второго направляющего ролика, который закреплен неподвижно. Согласно одной подходящей конструкции, расстояние между вторым направляющим роликом 109 и роликом 24 приблизительно в 10 раз больше ширины ленты.
В представленном варианте осуществления лента 101 обернута вокруг ролика 24 на протяжении приблизительно 130°. Другими словами, лента 101 при прохождении ролика 24 обходит приблизительно треть окружности ролика 24. Следует понимать, что путем изменения угла, под которым лента подается на ролик (т.е. угла подхода ленты) можно в большую или меньшую сторону изменять угол соприкосновения ролика 24 лентой.
В представленном варианте осуществления лента 101 при подаче проходит в поперечном направлении главным образом по центру ролика 24. Как говорилось ранее, ролик 24 представляет собой вытянутый усеченный сфероид, который сужается от середины к каждому из его краев. Такая форма ролика 24 не позволяет ленте 101 смещаться по длине ролика. Другими словами, форма ролика 24 способствует удержанию ленты 101 в поперечном направлении на середине ролика.
Когда лента 101 проходит через ролик 24, ролик вращается относительно оси 22. Точнее, ролик 24 свободно вращается относительно оси на подшипниках 43, расположенных между роликом и осью.
Как можно видеть из фиг.6, ленту 101 подают через ролик 24 на полотно 111 в область рядом с парой вальцов 113, 115. Часть полотна 111, которое движется в машинном направлении (по стрелке 116) через устройство 10, на фиг.6-9 «вырезана», чтобы показать устройство. Предполагается, что в других вариантах осуществления полотно 111 можно было бы подавать снизу устройства 10.
В представленном варианте осуществления полотно 111 содержит ряд сборных элементов впитывающего изделия, ориентированных поперек машинного направления. Однако, следует понимать, что сборные элементы впитывающего изделия могут быть ориентированы в машинном направлении, а не в поперечном, как это показано на фиг.6. Точнее, изображенное полотно 111 содержит непрерывное полотно из материала, подходящего для использования в качестве наружной оболочки 202 впитывающего изделия 200, и множество отстоящих друг от друга впитывающих вкладышей 204, прикрепленных к полотну. Согласно одному подходящему варианту осуществления, впитывающее изделие 200 может быть выполнено в форме изделия для ношения при недержании, изображенного на фиг.10, которое будет более подробно описано ниже. Следует понимать, что полотно 111 может представлять собой любой подходящий материал (например, материал, пригодный для использования в качестве внутренней подкладки), предназначенный для применения в других изделиях, включая другие типы впитывающих изделий (например, памперсы, детские трусы-подгузники).
Согласно фиг.6, вальцы 113, 115 вместе образуют зажим 117, через который проходит лента 101, клей 105 и полотно 111, что облегчает приклеивание ленты к полотну. Согласно одному варианту осуществления, расстояние D″ между роликом 24 направляющего механизма 12 и зажимом 117 сделано минимальным, чтобы исключить возникновение перекоса ленты 101 относительно полотна 111, прежде чем лента будет зафиксирована клеем на полотне. Целесообразно, чтобы расстояние D″ между роликом 24 и зажимом 117 было меньше, чем приблизительно 60 мм, и оптимально, чтобы оно составляло приблизительно 20-50 мм.
Согласно одному подходящему варианту осуществления, полотно 111 движется с высокой линейной скоростью, при этом в данном изобретении высокой линейной скоростью считается скорость большая, чем 183 м/мин.
Управление выставлением ленты 101 относительно полотна 111 осуществляется посредством устройства 10. Устройство 10 может наносить ленту 101 на полотно 111 в общем по линейному профилю (т.е. прямолинейно), по нелинейному профилю (т.е. криволинейно), и сочетая профили, когда одни части ленты наносятся линейно, а другие части ленты наносятся нелинейно. Согласно одному подходящему варианту осуществления, устройство 10 приспособлено для нанесения ленты 101 на полотно 111 со значительной криволинейностью при высокой линейной скорости движения ленты. В данном случае, значительная криволинейность означает, что радиус кривизны ленты составляет более, чем приблизительно 25 мм по меньшей мере на протяжении одного сегмента длины ленты. Целесообразно, чтобы по меньшей мере один сегмент ленты имел радиус кривизны приблизительно 76-254 мм.
В представленном варианте осуществления двигатель 52 узла 16 привода вращает приводной вал 54 в направлении против часовой стрелки. Скорость, с которой двигатель вращает приводной вал можно изменять, и это используется для управления скоростью возвратно-поступательного движения ролика 24, а точнее - скоростью направляющего механизма 12. Следует понимать, что двигатель 52 может вращать приводной вал с постоянной скоростью и в направлении по часовой стрелке. В представленном варианте осуществления направляющий механизм 12 совершает возвратно-поступательное движение вдоль оси, которая перпендикулярна машинному направлению. Однако, следует понимать, что направляющий механизм 12 может совершать возвратно-поступательное движение в различных направлениях.
Направляющий механизм 12, который прикреплен к ползуну, движется вместе с ползуном 64. Соответственно, ролик 24 следует той же траектории движения, что и ползун 64. Как говорилось выше, ролик 24 управляет укладкой ленты 101 на полотно 111. Таким образом, работой двигателя 52 можно селективно управлять с целью управления укладкой ленты 101 по профилю на полотно 111. Например, в представленном варианте осуществления на фиг.6 в работу двигателя 52 вводят паузу (т.е. останавливают двигатель) или значительно его замедляют, так чтобы лента 101 ложилась на полотно 111 в целом по прямой линии, чтобы получить первый, в общем, прямой сегмент 119 ленты.
Затем за счет двигателя 52 скорость вращения проводного вала увеличивают, чтобы получить первый криволинейный участок 121 ленты 101. В процессе такого увеличения скорости вращения, приводной вал 54 узла 16 привода заставляет первый шкив 58 ременной передачи 56 вращаться. Первый шкив 58 приводит в движение ремень 62 и тем самым - второй шкив 60. Вращение второго шкива 60 приводит к вращению колеса 42 кривошипно-ползунного механизма 14 через передающий вал 64.
Положение шатуна 44 на колесе 42 задает относительное положение ползуна 46, и таким образом, направляющего механизма 12. Например, на фиг.6 конец 45 шатуна 44, прикрепленного к колесу 42, находится в положении приблизительно «3 часов», что приводит к тому, что ползун 64 и направляющий механизм 12 находятся в их крайнем левом положении (если смотреть по фиг.6). По мере того как колесо 42 поворачивается против часовой стрелки, конец 45 шатуна 44 движется вместе с колесом к положению «12 часов», как показано на фиг.7, что заставляет ползун 64 перемещаться по рельсу 48 в направлении колеса (т.е. вправо, если смотреть по фиг.7). Направляющий механизм 12, включая ролик 24, движется вместе с ползуном 64, и направляет ленту 101 на полотно 111, укладывая ее по криволинейному профилю.
Ползун 64 и тем самым направляющий механизм 12 продолжают двигаться вправо, как показано на фиг.7, до тех пор, пока конец 45 шатуна 44 кривошипно-ползунного механизма 14 не достигнет положения «9 часов», что изображено на фиг.8. В этом состоянии шатун 44, ползун 64 и направляющий механизм 12 занимают их крайнее правое положение (если смотреть по фиг.8). В результате ролик 24 и тем самым лента 101 также оказываются в своем крайнем правом положении (по чертежу), и при укладке ленты 101 на полотно 111 образуется вершина 123.
Когда колесо 42 продолжает свое вращение против часовой стрелки и конец 45 шатуна 44 переводится за положение «9 часов», шатун начинает толкать ползун 64 в противоположном направлении по рельсу 48 (т.е. влево, если смотреть по фиг.8). На фиг.9 показано, что колесо 42 продолжает свое вращение против часовой стрелки, конец 45 шатуна 44 оказывается в общем в положении «6 часов», и ползун 64 движется по рельсу 48 влево, как показано на фиг.8. Ползун 64 и направляющий механизм 12 продолжают двигаться влево до тех пор, пока конец 45 шатуна 44 не пройдет положение «9 часов», которое показано на фиг.6. Данное перемещение направляющего механизма 12 формирует второй, в общем, криволинейный участок 125 ленты 101 при ее нанесении на полотно 111.
Фиг.6-9 все вместе иллюстрируют один полный оборот колеса 42 (т.е. поворот на угол 360°) кривошипно-ползунного механизма 14. Таким образом, ползун 64 за один оборот колеса совершает один полный цикл возвратно-поступательного движения. То есть, множество оборотов приведет к такому же числу циклов возвратно-поступательного движения ползуна 64. В представленном варианте осуществления нанесение ленты 101 на полотно 111 происходит в целом по синусоидальному профилю. Однако, следует понимать, что профили ленты 101 при ее нанесении на потно 111 могут отличаться от профиля, представленного на фигурах.
Диапазон перемещения ползуна 64 (т.е. поперечное смещение) по рельсу 48 можно изменять путем изменения расстояния D между центром 50 колеса 42 и концом 45 шатуна 44, прикрепленного к колесу. Например, диапазон перемещения ползуна 64 можно уменьшить, уменьшив расстояние D между центром 50 колеса 42 и концом 45 шатуна 44, прикрепленного к колесу. И наоборот, диапазон перемещения ползуна 64 можно увеличить, увеличив расстояние D между центром 50 колеса 42 и концом 45 шатуна 44, прикрепленного к колесу. Скорость, с которой ползун 64 совершает возвратно-поступательное движение вдоль рельса 48, за счет двигателя 52 можно поддерживать постоянной, увеличивать, уменьшать или можно вообще останавливать движение ползуна 64. Как говорилось выше, направляющий механизм 12 движется вместе с ползуном 64. Таким образом, изменение профиля движения ползуна 64 приводит к такому же изменению профиля движения направляющего механизма 12.
Одна подходящая конструкция изделия 200, предназначенного для ношения при недержании, включающая полотно 111 с наклеенной на него лентой 101, изображена на фиг.10 в собранном виде. Как можно видеть, изделие 200 содержит наружную оболочку 202, впитывающий вкладыш 204 и ножные резинки 201, которые образованы лентой 101. Следует понимать, что изделие 200, помимо изображенных на фигурах и описанных элементов, может включать в себя и многие другие компоненты (например, подкладку, застежки).
При упоминании элементов в описании предпочтительных вариантов осуществления изобретения такие слова как «один», «определенный» и «указанный» подразумевают, что имеется один или более таких элементов. Термины «содержащий», «включающий» и «имеющий» означают, что могут быть и дополнительные элементы - другие, нежели перечисленные. Кроме того, слова «верх», «низ», «выше», «ниже» и их варианты использованы для удобства и не требуют какой-либо определенной ориентации определенных компонентов.
В форму и детали осуществления изобретения могут быть внесены различные изменения, не выходящие за границы идеи и объема изобретения. Весь материал, содержащийся в вышеприведенном описании и представленный на прилагаемых чертежах, следует воспринимать как иллюстративный и не ограничивающий самое изобретение.

Заявлено устройство и способ для нанесения ленты на полотно по нелинейному шаблону. Устройство для нанесения ленты на полотно по нелинейному шаблону содержит направляющий механизм, включающий в себя ролик для задания направления ленте при ее укладке на полотно, когда полотно движется в первом направлении. Предусмотрен механизм, обеспечивающий возвратно-поступательное движение, для перемещения по меньшей мере ролика направляющего механизма в прямом и обратном направлениях вдоль оси перемещения. При этом ось перемещения не параллельна указанному первому направлению. Данное устройство позволяет наносить ленту на полотно, движущееся с высокой линейной скоростью. 3 н. и 17 з.п. ф-лы, 10 ил.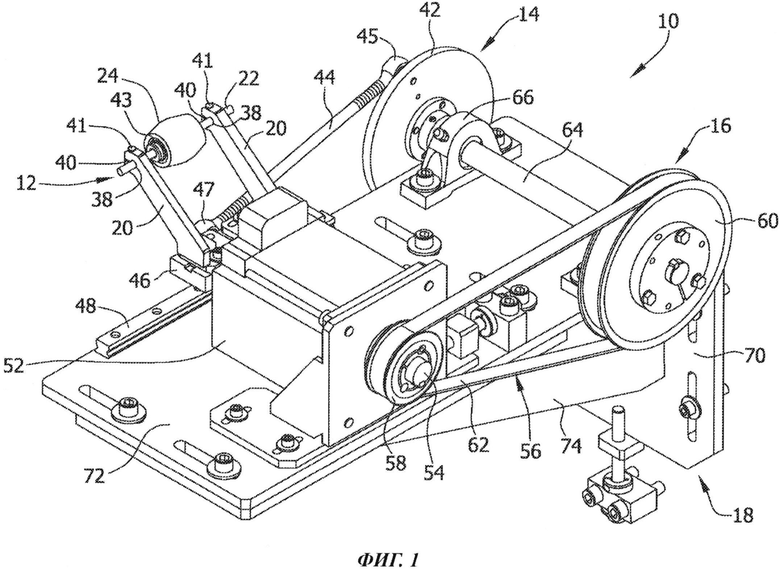
1. Устройство для нанесения ленты на полотно по нелинейному шаблону, содержащее направляющий механизм, включающий в себя ролик для задания направления ленте при ее укладке на полотно, когда полотно движется в первом направлении; и механизм, обеспечивающий возвратно-поступательное движение, для перемещения по меньшей мере ролика направляющего механизма в прямом и обратном направлениях вдоль оси перемещения, причем ось перемещения непараллельна указанному первому направлению.
2. Устройство по п.1, отличающееся тем, что ось перемещения по существу перпендикулярна указанному первому направлению.
3. Устройство по п.1, отличающееся тем, что механизм, обеспечивающий возвратно-поступательное движение, выполнен с возможностью перемещения направляющего механизма в прямом и обратном направлениях с изменяемой скоростью.
4. Устройство по п.1, отличающееся тем, что механизм, обеспечивающий возвратно-поступательное движение, содержит рельс и ползун, установленный на рельсе, причем ползун выполнен с возможностью скольжения относительно рельса, при этом направляющий механизм соединен с ползуном.
5. Устройство по п.1, отличающееся тем, что ролик представляет собой вытянутый усеченный сфероид.
6. Устройство по п.1, отличающееся тем, что направляющий механизм содержит по меньшей мере одно несущее коромысло и ось, поддерживаемую указанным по меньшей мере одним коромыслом, при этом ролик установлен на указанной оси с возможностью вращения.
7. Устройство по п.1, отличающееся тем, что механизм, обеспечивающий возвратно-поступательное движение, содержит кривошипно-ползунный механизм и узел привода, функционально соединенный с кривошипно-ползунным механизмом.
8. Устройство для нанесения ленты на полотно по нелинейному шаблону, содержащее направляющий механизм, включающий в себя ролик для задания направления ленте при ее укладке на полотно, когда полотно движется в первом направлении; и кривошипно-ползунный механизм, функционально соединенный с направляющим механизмом для сообщения возвратно-поступательного движения по меньшей мере ролику направляющего механизма, так чтобы указанный ролик можно было перемещать в прямом и обратном направлениях относительно полотна, когда ролик направляет ленту на полотно.
9. Устройство по п.8, отличающееся тем, что кривошипно-ползунный механизм содержит колесо, шатун, присоединенный одним концом к колесу, и ползун, присоединенный к противоположному концу шатуна, причем на ползуне установлен направляющий механизм, а вращение колеса преобразуется шатуном в возвратно-поступательное движение ползуна.
10. Устройство по п.8, отличающееся тем, что колесо в целом имеет форму круга.
11. Устройство по п.8, отличающееся тем, что шатун выполнен с возможностью съемного присоединения к колесу во множестве мест.
12. Устройство по п.11, отличающееся тем, что дополнительно содержит узел привода для приведения в движение кривошипно-ползунного механизма.
13. Устройство по п.12, отличающееся тем, что узел привода содержит двигатель с изменяемой частотой вращения, функционально соединенный с кривошипно-ползунным механизмом.
14. Устройство по п.13, отличающееся тем, что узел привода также содержит ременную передачу, функционально связывающую двигатель с кривошипно-ползунным механизмом.
15. Способ нанесения ленты на полотно, содержащий этапы, на которых подают полотно с высокой линейной скоростью в машинном направлении; направляют ленту на полотно, используя направляющий ролик, при этом при помощи направляющего ролика наносят ленту на полотно по нелинейному шаблону, так чтобы по меньшей мере участок ленты имел радиус кривизны в диапазоне порядка 76-254 мм.
16. Способ по п.15, отличающийся тем, что натягивают ленту перед ее нанесением на полотно.
17. Способ по п.15, отличающийся тем, что наносят клей на ленту перед нанесением самой ленты на полотно.
18. Способ по п.15, отличающийся тем, что подача полотна включает подачу множества впитывающих сборных элементов, присоединенных поперечно машинному направлению.
19. Способ по п.15, отличающийся тем, что подают полотно и ленту через зажим, образованный парой вальцов.
20. Способ по п.15, отличающийся тем, что обеспечивают возвратно-поступательное перемещение направляющего механизма вдоль оси перемещения, которая ориентирована по существу перпендикулярно машинному направлению.
| US 20100175807 A1, 15.07.2010 | |||
| WO 2010028751 A1, 18.03.2010 | |||
| US 6378750 B1, 30.04.2002. |

