Изобретение относится к машиностроению. Оно касается измерения замедления поступательно движущихся механических систем для определения сопротивлений их движению с целью оценки потерь энергии. По величине этих потерь судят об энергетическом совершенстве систем и механизмов. При этом сопротивления движению определяют как произведения величины замедления на приведенные моменты инерции систем.
Известны способы определения отрицательных ускорений (замедлений) механических систем методом выбега [1], [2], [3] при которых на вращающиеся детали системы устанавливают датчик оборотов и его сигналы используют для регистрации времени получения каждого сигнала, после чего замедление j определяют по формуле малых приращений скорости ΔV и времени Δt (фиг.1):

где V1 - скорость некоторой точки вращающейся детали радиуса R в начале интервала Δt, V2 - скорость в конце интервала Δt.
В свою очередь скорости V1 и V2 определяют по формулам малых приращений пути Δl1 и Δl2 и времени Δt1 и Δt2 (фиг.2):


В результате измерений получают:
Таким образом, алгоритм измерений замедления содержит пять источников погрешностей, входящих в формулу 2, и дополнительно три источника погрешностей в результате спрямления участков кривых V1-V2 (см. фиг.1) и l1-l2, l3-l4 (см. фиг.2). Это является основным недостатком указанных способов определения замедлений вращающихся тел.
Известны также способы определения замедлений валов двигателей внутреннего сгорания с помощью комбинации специальных приборов [4], [5]. Однако в описании этих способов нет сведений, касающихся вычислительных действий для определения замедлений.
Решаемой задачей является достижение высокой точности и эффективности определения замедлений механических систем, в особенности замедлений малых по величине, сопротивление движению которых Р описывается полиномом второй степени скорости вида:
Р=а+bV+cV2,
где а, b и c - константы,
V - поступательная скорость системы.
Указанная задача решается за счет:
- исключения необходимости измерения величин непрямого измерения, таких как скорость,
- применения специальной формулы функции "путь-время" для аппроксимации результатов измерений, обеспечивающей минимальные расхождения между экспериментальными и аналитическими данными,
- придания способу универсальности применения для измерений замедлений как во всем диапазоне скоростей, так и для локальных значений скорости.
Вращающуюся деталь поступательно движущейся системы снабжают датчиком оборотов с одной меткой, что исключает неточность угловой разметки, которая появилась бы при большом количестве меток. Реагирующий на одиночную метку датчик оборотов соединяют с регистрирующим прибором и компьютером. Регистрируют, например, в дискретной форме зависимость числа оборотов, а при известном радиусе вращающейся детали - пути в функции времени на определенном отрезке временного интервала, аппроксимируют эту зависимость детерминированной, непрерывной, дифференцируемой функцией, учитывающей кинематическую связь вращающейся детали с поступательной скоростью системы. Вторую производную указанной функции по времени используют для получения зависимости замедления системы от времени. Поскольку преобразование функции «путь-время» в функцию «замедление-время» выполняется на основе положений дифференциального исчисления высшей математики с абсолютной математической точностью, точность определения замедления зависит только от точности измерений периода оборотов и параметра движения наблюдаемой точки и качества аппроксимации экспериментальной кривой «путь-время». Этим достигается простота, высокая точность получаемых результатов и сокращение времени каждого измерения.
Определение замедлений поступательно движущихся систем с вращающимися элементами выполняют установив кинематическую связь между окружной и поступательной скоростями.
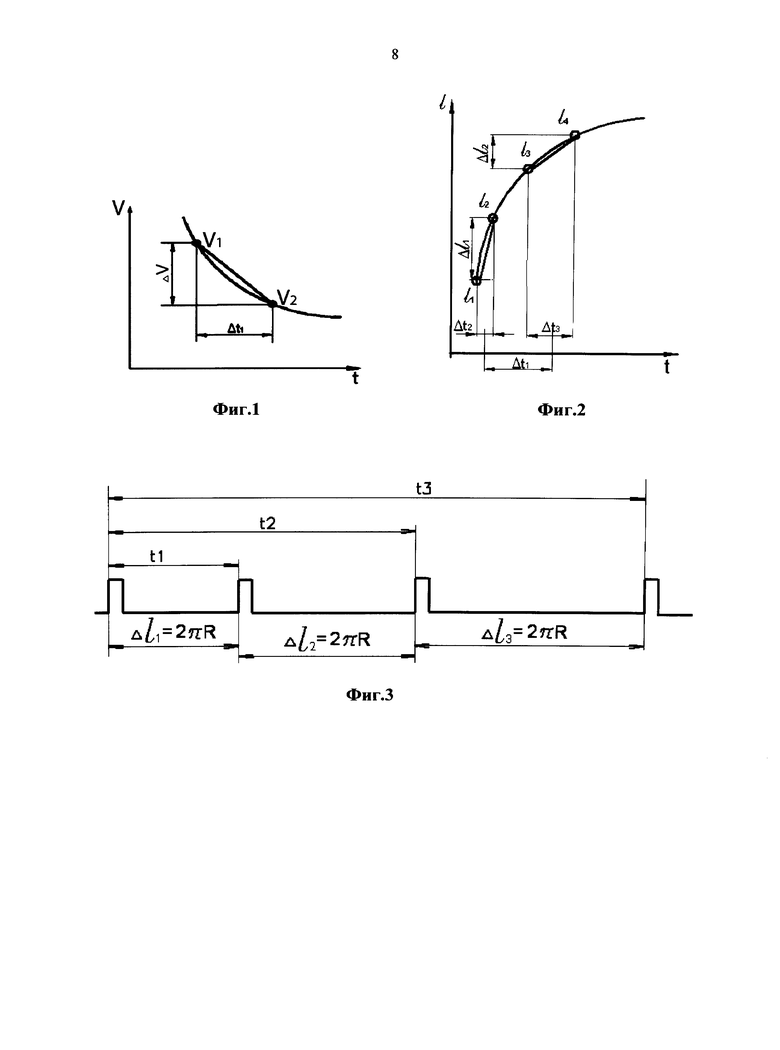
На фиг.3 показан принцип измерения времени выбега как нарастающей суммы периодов вращения тела радиуса R с единственной меткой для датчика.
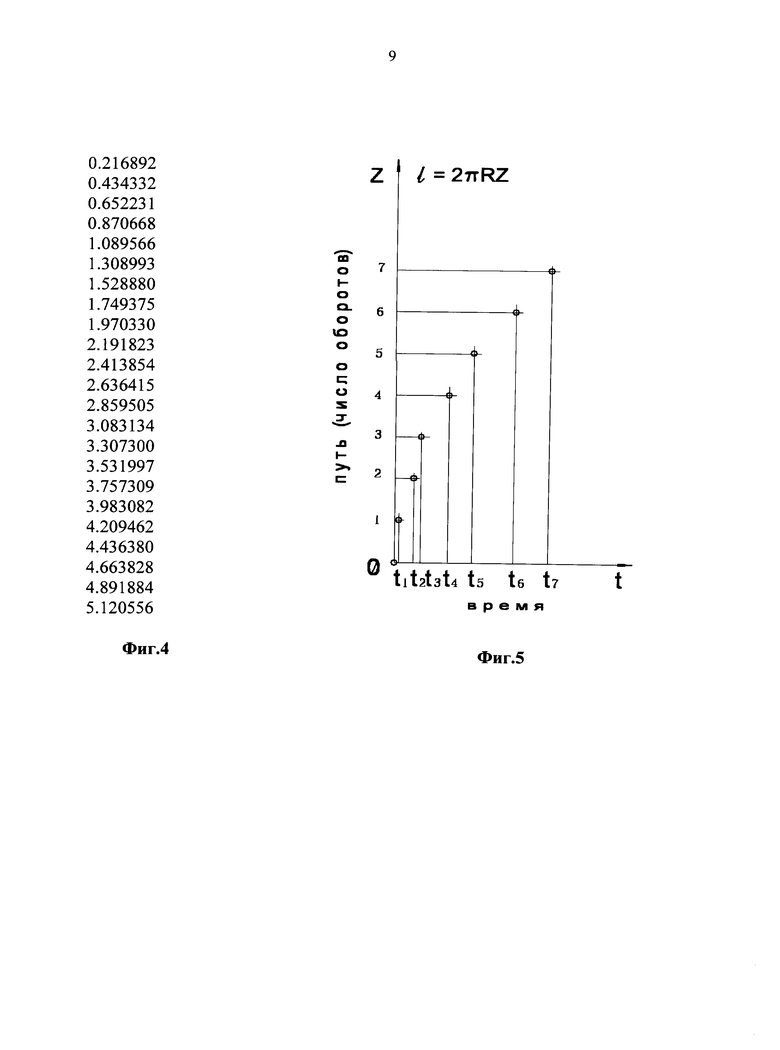
На фиг.4 показан фрагмент примера реальной записи времени выбега вращающегося тела для каждого его оборота. При этом порядковый номер строки записи тождествен количеству оборотов z, совершенных телом.
На фиг.5 показана графическая зависимость дискретных значений "путь-время" выбега в виде функции l(z)=f(t) на основе данных, подобных показанным на фиг.4.
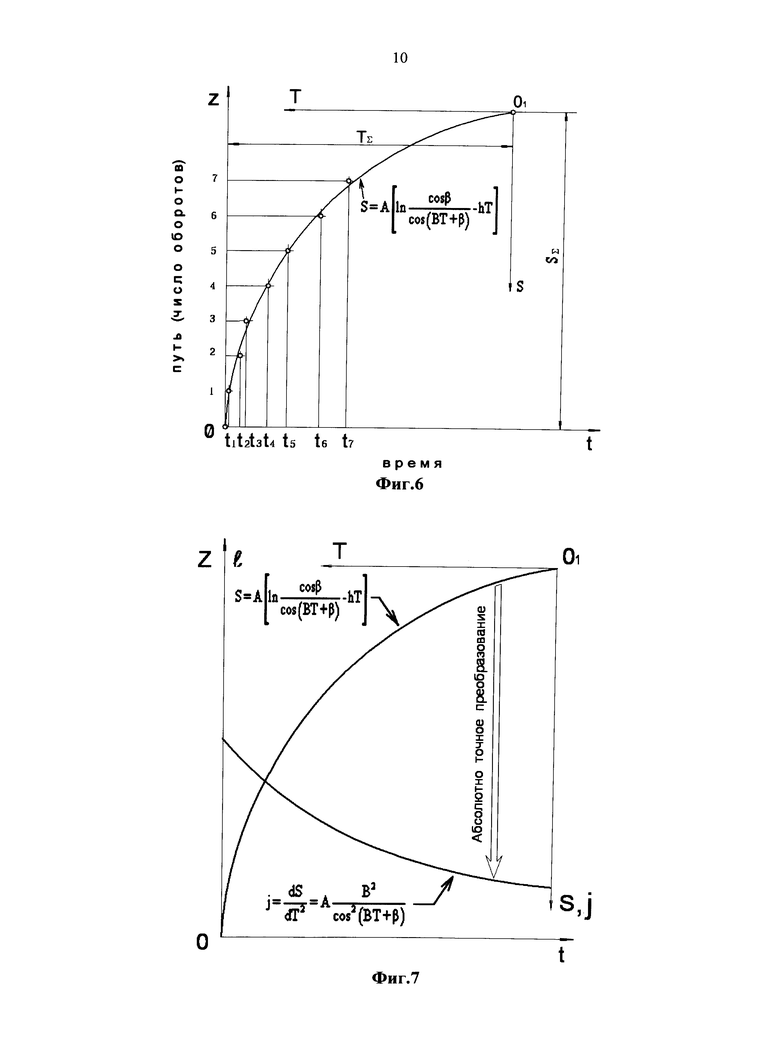
На фиг.6 показана аппроксимация экспериментальной зависимости "путь-время" специальной функцией S=f(T). На этой же фигуре поясняется связь между текущими и ретроспективными параметрами выбега.
На фиг.7 показан переход от зависимости "путь-время" S=f(T) к зависимости "замедление-время" j=f(T) по правилу дифференциального исчисления.
Заявляемый способ реализуется следующим образом: на вращающемся теле системы устанавливают одну метку, а на неподвижном относительно вращающегося тела основании - реагирующий на нее датчик, например индуктивный, по сигналам которого, с точностью не менее ±50 мкс, производят регистрацию прибором значений времени t каждого оборота тела, как показано на фиг.4 и 5. В результате получают дискретное выражение "путь-время" в виде зависимости числа оборотов z и пути l=2πRz от времени t. Эту дискретную зависимость передают на компьютер и аппроксимируют (фиг.6) формулой:

где S и Т - ретроспективные путь и время соответственно, т.е. путь и время до остановки вращающегося тела;
А, В, β и h - константы, причем:

где δ - коэффициент вращающихся масс системы.
Константу b и связанные с ней h и β находят предварительными испытаниями узла системы, имеющего сопротивления движению Р1, описываемые зависимостью:
Р=а+bV+cV2,
Для связи между величинами S и l используют соотношение, которое поясняет фиг.6:
S=S∑-l,
где S∑ - полный путь выбега.
Для связи между величинами Т и t используют соотношение (см. фиг.6):
T=T∑-t,
где T∑ - полное время выбега.
Константы А и В, входящие в формулу (3), а также параметры S∑ и T∑ находят из системы 4-х уравнений вида:
где li и ti координаты выбранной i-й точки функции l=f(t). Значения z=1,2,3,4 выбирают из значений количества оборотов z, например, с одинаковыми интервалами Δ:
Δ=z1=z2-z1=z4-z3,
Например, колесо автомобиля при выбеге со скорости 90 до 70 км/ч совершило 203 оборота. Принимают за z4 ближайшее значение z, кратное 4-м, т.е. z4=200. Тогда Δ=z4/4=z1=50, z2=100, z3=150.
Замедление j получают, взяв вторую производную от функции (3) (фиг.7):

Многочисленные эксперименты показали, что применение формулы (3) для аппроксимации экспериментальных данных обеспечивает среднеквадратическое отклонение аппроксимирующей кривой, не превышающее 0,02%, и коэффициент корреляции R2 , превышающий 0,9999.
Таким образом, способ обеспечивает:
- получение данных о величинах отрицательных ускорений (замедлений) вращающегося тела без необходимости измерения скорости как источника значительных погрешностей,
- минимальные расхождения между экспериментальными данными и аналитическим выражением их результатов,
- универсальность применения способа для измерения замедлений для различных диапазонов скоростей выбега.
Этим решается поставленная заявителем задача.
Способ может применяться для измерения замедлений механических систем с целью последующего определения:
- сопротивлений движению автомобилей и автопоездов в дорожно-полигонных условиях,
- диагностики механизмов и агрегатов, использующих в качестве основных элементов вращающиеся роторы (турбины, электродвигатели и т.п.),
- особенно полезным способ оказывается для высокоточных измерений замедлений систем, у которых сопротивление движению описывается уравнениями 2-й степени скорости при малых значениях j≤0.02g, где другие способы неэффективны.
Источники информации
1. А. Янте. Механика движения автомобиля, Часть 1, Машгиз, 1958. Стр.118-124.
2. Б.С. Фалькевич. Дорожные испытания автомобилей, Гострансиздат, 1936. Стр.19-20.
3. И.В. Новопольский. Измерение потерь на качение - один из видов лабораторных испытаний автомобильных шин, Труды НИИШП, сборник 3, Москва, Госхимиздат. 1957. Стр.122-138.
4. Патент РФ №2250469. Устройство для измерения ускорения коленчатого вала двигателя внутреннего сгорания. МПК: G01P 15/00.
5. Патент РФ №2329510. Устройство для измерения ускорения коленчатого вала двигателя внутреннего сгорания на всем диапазоне скоростей. МПК: G01P 15/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАМЕДЛЕНИЙ ВРАЩАЮЩИХСЯ ТЕЛ | 2013 |
|
RU2570843C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОПРОТИВЛЕНИЙ КАЧЕНИЮ КОЛЕСА С ЭЛАСТИЧНОЙ ШИНОЙ НА БАРАБАННОМ СТЕНДЕ МЕТОДОМ ВЫБЕГА | 1999 |
|
RU2158910C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОПРОТИВЛЕНИЯ ДВИЖЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2130599C1 |
| КОМПОЗИЦИИ И СИСТЕМЫ ДЛЯ ОЦЕНКИ ФУНКЦИИ ПОЧЕК | 2018 |
|
RU2760279C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ ШАГАЮЩИМ КОПИРУЮЩИМ РОБОТОМ | 1997 |
|
RU2134193C1 |
| СИСТЕМА АДАПТИВНОГО ДВУХПОЗИЦИОННОГО УПРАВЛЕНИЯ | 2010 |
|
RU2430398C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕНЗОРА ИНЕРЦИИ ТЕЛА | 2002 |
|
RU2262678C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КИНЕТИЧЕСКИХ ТЕПЛОФИЗИЧЕСКИХ СВОЙСТВ ТВЕРДЫХ МАТЕРИАЛОВ | 2018 |
|
RU2701775C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИЙ ПРОИЗВОДНЫХ ГЕМОГЛОБИНА В БИОЛОГИЧЕСКИХ ТКАНЯХ | 2013 |
|
RU2517155C1 |
| СПОСОБ ДИНАМИЧЕСКОГО МОНИТОРИНГА ВЫСОКОМОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745382C1 |
Предложенное изобретение относится к области испытания механических систем, которые оценивают по замедлению при выбеге вращающейся детали, и может быть использовано для определения отрицательных ускорений вращающихся частей или систем в целом. Способ определения замедлений поступательно движущихся систем заключается в том, что на вращающуюся деталь системы устанавливают метку, сигналы от которой принимают посредством датчика. При этом используют только одну метку, создающую один сигнал во время одного оборота вращающейся детали, регистрируют число оборотов вращающейся детали в функции времени, аппроксимируют зависимость числа оборотов от времени непрерывной дифференцируемой функцией «путь-время», учитывающей кинематическую связь вращающейся детали с поступательной скоростью системы. После этого замедление получают в виде второй производной указанной функции по времени. Данное изобретение позволяет повысить точность и эффективность определения малых по величине замедлений механических систем. 7 ил.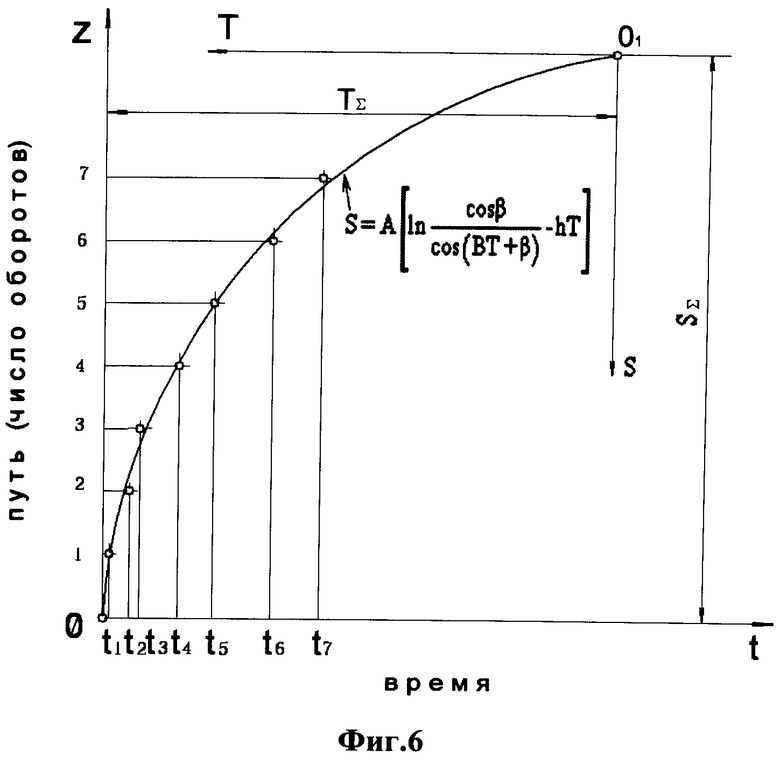
Способ определения замедлений поступательно движущихся систем, заключающийся в том, что на вращающуюся деталь системы устанавливают метку, сигналы от которой принимают посредством датчика, при этом используют только одну метку, создающую один сигнал во время одного оборота вращающейся детали, регистрируют число оборотов вращающейся детали в функции времени, аппроксимируют зависимость числа оборотов от времени непрерывной дифференцируемой функцией «путь-время», учитывающей кинематическую связь вращающейся детали с поступательной скоростью системы вида:
 ,
,
где S и Т - ретроспективные путь и время соответственно, т.е. путь и время до остановки вращающегося тела;
А, В, β и h - константы, причем:
 ,
,
 ,
,
где δ - коэффициент вращающихся масс системы, константу b и связанные с ней h и β находят путем предварительных испытаний узла системы, имеющего сопротивления движению P1, описываемые зависимостью:
Р=а+bV+cV2,
после чего замедление j получают в виде второй производной этой функции по времени:
 .
.
| статья В.П.Волкова, Э.Х.Рабиновича, Ю.В.Зыбцева и др | |||
| Открыватель для консервных металлических банок | 1929 |
|
SU21703A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОПРОТИВЛЕНИЙ КАЧЕНИЮ КОЛЕСА С ЭЛАСТИЧНОЙ ШИНОЙ НА БАРАБАННОМ СТЕНДЕ МЕТОДОМ ВЫБЕГА | 1999 |
|
RU2158910C1 |
| Устройство для сигнализации о появлении обратных токов в цепях постоянного тока | 1961 |
|
SU140861A1 |
| Устройство для измерения параметров вращения ротора в переходных режимах | 1983 |
|
SU1352369A1 |

