Изобретение относится к автоматическому управлению, а именно к адаптивным системам двухпозиционного автоматического управления и может быть использовано как при автоматизации бытовых объектов (электропечи, холодильники), общепромышленных объектов (муфельные печи, промышленные холодильники) с двухпозиционным законом управления, так и при модернизации существующих систем двухпозиционного управления технологическими величинами (температура, давление, влажность).
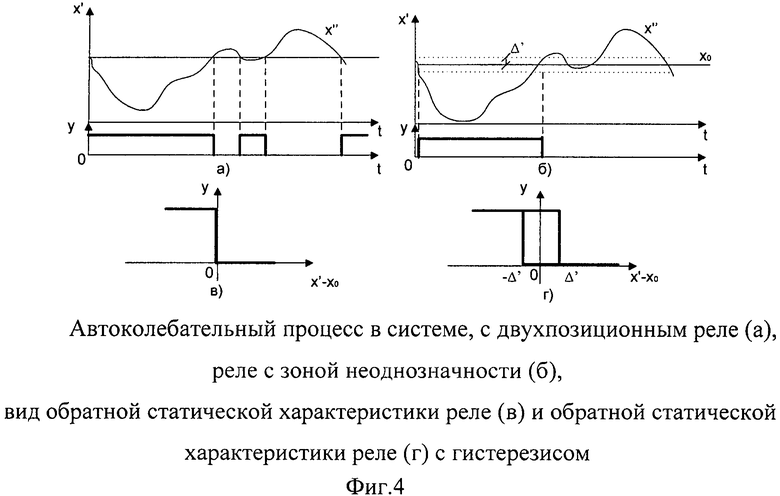
Известны системы двухпозиционного управления, построенные с использованием двухпозиционных регуляторов с фиксированными позициями типа реле, переключение осуществляется при переходе регулируемой величины через линию задания, низкий уровень сигнала соответствует нахождению регулируемой величины под линией задания, высокий уровень соответствует нахождению регулируемой величины над линией задания. Управляющий сигнал с выхода реле поступает на вход исполнительного устройства, которое в свою очередь воздействует на объект управления (в частности на регулируемую величину) (А.А.Кампе-Немм. Автоматическое двухпозиционное регулирование. - М.: Наука, 1967, с.6). Недостатком такой системы является низкое качество регулирования и частое переключение (вызванное дребезгом контактов). При использовании реле с зоной неоднозначности удается избежать частых переключений, но при этом ухудшается качество регулирования.
Цель изобретения - устранение недостатков систем двухпозиционного регулирования, связанных с дребезгом контактов, и улучшение параметров качества регулируемого процесса, приводящего к снижению энергопотребление объекта управления.
Технический результат изобретения состоит в предложении оригинальной системы адаптивного двухпозиционного управления, состоящей из датчика управляемой переменной, подключенного к управляющей обмотке реле, на вторую обмотку которого подается сигнал задания. Реле, сравнивая эти два сигнала, выдает двухпозиционный сигнал, поступающий на противодребезговую схему. В структуру системы введен микроконтроллер, на вход которого поступает выходной сигнал противодребезговой схемы, в соответствии с которым формируется управляющее воздействие по алгоритму, реализующая по пункту 2 оригинальный способ повышения эффективности управления за счет адаптации к нагрузке. Сформированное управляющее воздействие с выхода микроконтроллера через выходной каскад поступает на исполнительное устройство, воздействующее на объект управления.
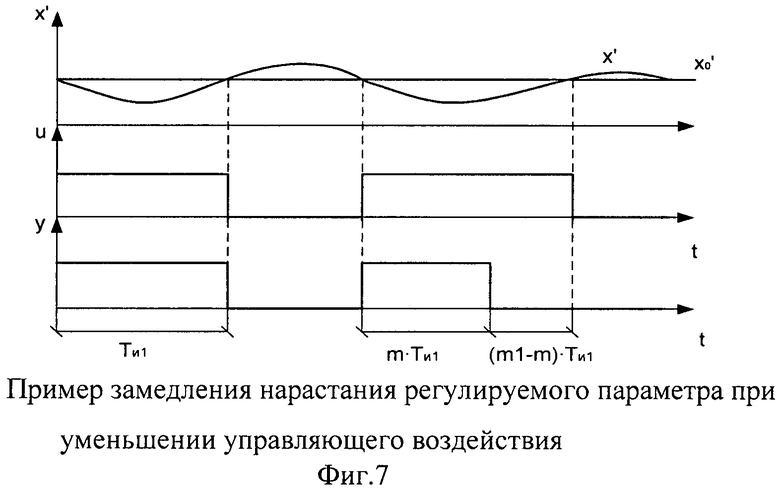
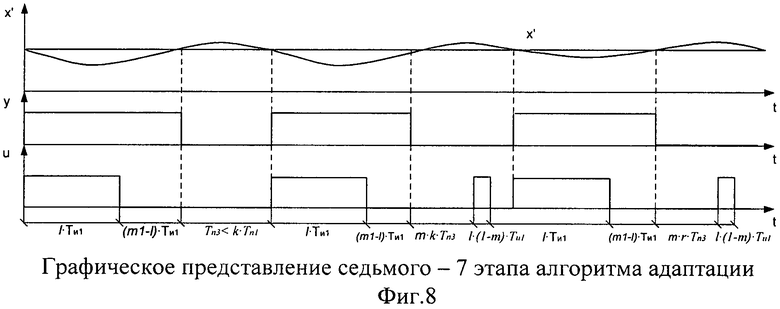
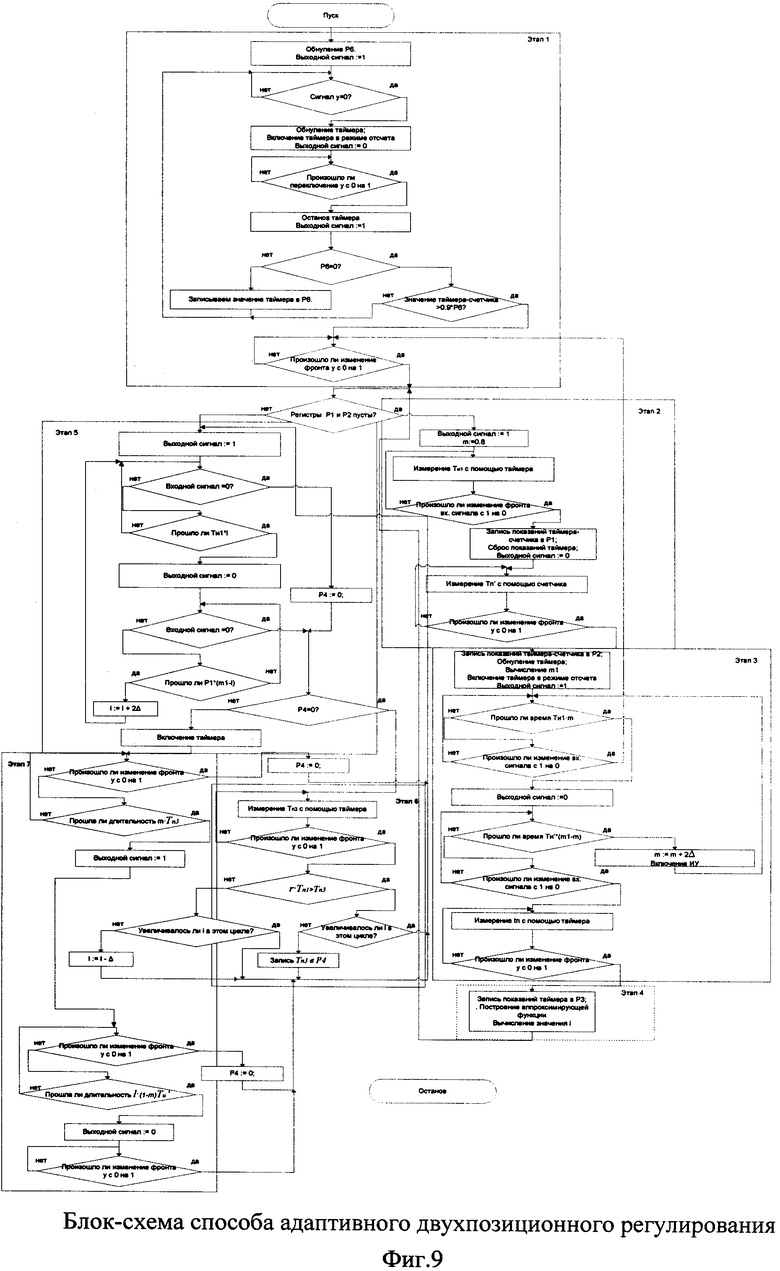
На фиг.1 представлена адаптивная система двухпозиционного регулирования; на фиг.2 представлена система двухпозиционного регулирования; на фиг.3 представлено положение позиции управляющего сигнала в зависимости от нахождения регулируемого параметра относительно линии задания; на фиг.4 представлен автоколебательный процесс в системе с двухпозиционным реле (а), реле с зоной неоднозначности (б), а также вид обратной статической характеристики реле (в) и обратной статической характеристики реле (г) с гистерезисом; на фиг.5 представлен вид условно-аппроксимирующей функции; на фиг.6 изображено графическое представление первого - 1 и второго - 2 этапов алгоритма адаптации; на фиг.7 представлен пример замедления нарастания регулируемого параметра при уменьшении управляющего воздействия; на фиг.8 изображено графическое представление седьмого - 7 этапа алгоритма адаптации; на фиг.9 изображена блок-схема способа адаптивного двухпозиционного регулирования.
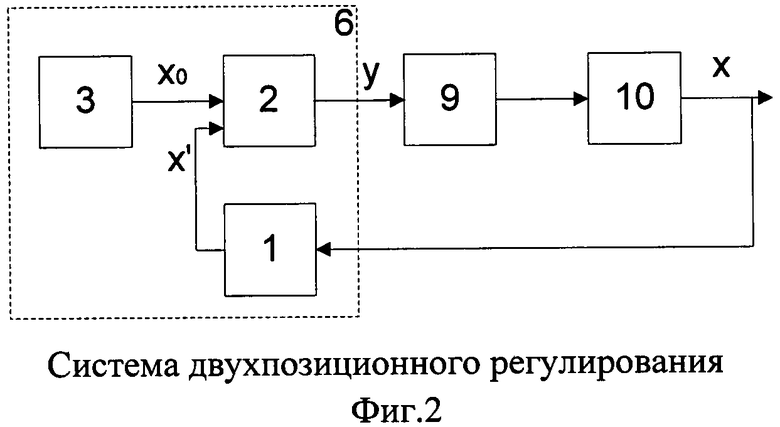
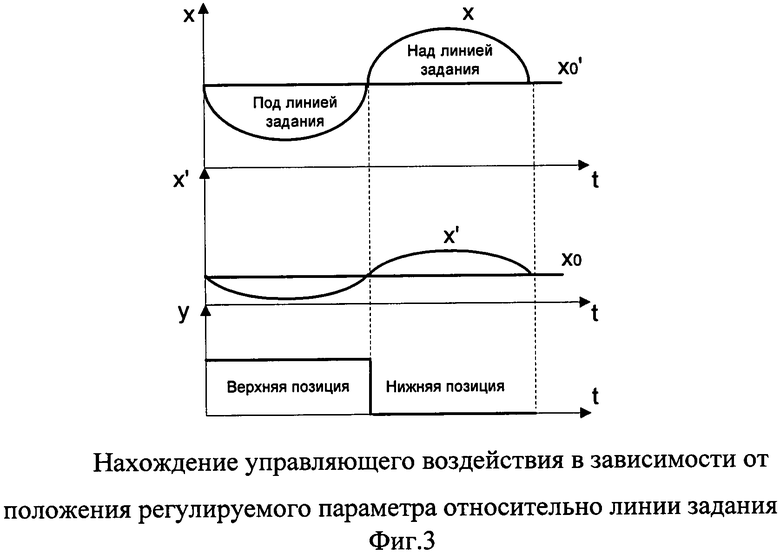
Адаптивная система управления (фиг.2) состоит из датчика 1, измеряющего регулируемую величину x, соединенного с обмоткой реле 2. Реле сравнивает преобразованный датчиком сигнал x' с сигналом задания х0, поступающим от задатчика 3 (в некоторых случаях датчик, реле и задатчик представляют собой одно устройство 6). Сигнал у выхода реле 2 может находиться в одной из двух позиций обратной релейной характеристики (фиг.4,в). Сигнал у находится в нижней позиции (реле разомкнуто), если регулируемая величина находится над линией задания (фиг.3), y находится в верхней позиции, если регулируемая величина - под линией задания. Это можно записать следующим образом:

Выходной сигнал релейного регулятора попадает на вход противодребезговой схемы 4, выход которой соединен со входом микроконтроллера 5. Выход микроконтроллера 5 соединен с выходным каскадом 6. Блок питания 7 обеспечивает энергией блоки программируемой приставки 8.
Выходной каскад 6 адаптивной приставки 8 соединяется со входом исполнительного устройства 9, воздействующего на объект управления 10.
В микроконтроллер 5 прошит алгоритм работы системы управления. Для этого структура микроконтроллера имеет таймер, работающий как в режиме измерения длительности, так и в режиме отсчета времени, внутреннюю память, для сохранения измеренных величин, а также записи программы алгоритма управления.
Известны способы двухпозиционного регулирования на основе прямой и обратной релейных характеристик, где переключение осуществляется при переходе регулируемой величины через линию задания, низкий уровень сигнала соответствует нахождению регулируемой величины под линией задания, высокий уровень соответствует нахождению регулируемой величины над линией задания (А.А.Кампе-Немм. Автоматическое двухпозиционное регулирование. - М.: Наука, 1967, с.7). Недостатком такого способа является низкое качество регулирования. При использовании релейного закона управления с зоной неоднозначности удается избежать частых переключений, но при этом ухудшается качество регулирования.
Также известен способ, основанный на выбеге регулируемой величины за заданную зону адаптации. В зависимости от направления выбега изменяют значение недействующей позиции регулятора в сторону действующей позиции регулятора согласно пат. №2144690, МПК7 G05B 11/16. Недостатком этого способа является низкая скорость сходимости вследствие большого количества итераций. Более высокая скорость адаптации достигается путем присвоения недействующей позиции усредненного значения действующей и недействующего значения в случае выбега регулируемого параметра за зону адаптации, патент №2158435, МПК7 G05B 11/18. Однако в этих способах адаптация происходит только в одном направлении (величина управляющего воздействия может только уменьшаться) и способ не предлагает возможности перенастройки значения управляющего воздействия в случае изменения нагрузки объекта (в случае необходимости увеличения величины управляющего воздействия). В патенте №2129726, 11/54, 11/16 предлагается введение зоны реадаптации. В случае выбега регулируемой величины за зону реадаптации действующей позиции присваивается ее крайнее значение и адаптация начинается заново. Во всех вышеописанных способах на входе регулятора используется аналоговый сигнал, тогда как достаточным для управления может являться двухпозиционный сигнал. Также на выходе регулятора используется позиционный сигнал управления, тогда как использование двухпозиционного сигнала позволяет значительно упростить конструкцию и принцип действия регуляторов, основанных на адаптации управляющего воздействия под текущую нагрузку объекта.
Технический результат состоит в предложении нового способа адаптивного двухпозиционного регулирования, приводящего к уменьшению амплитуды автоколебаний и энергосбережению.
При включении системы регулируемая переменная, например температура, нарастает от исходного состояния, условно принимаемого за нулевое, до некоторого заданного значения, определяемого уровнем сигнала задатчика (фиг.4,а, начальный участок). При этом будет возрастать уровень выходного сигнала датчика, подаваемого по цепи обратной связи на управляющую обмотку реле, настроенного на срабатывание по рассогласованию между значениями сигналов задатчика и датчика. При таком регулировании динамика процесса представляет собой автоколебательный режим, причем амплитуда колебаний будет затухать до некоторого установившегося значения. Предложенный способ подавления автоколебаний состоит в реализации следующих этапов:
Этап 1
После выхода регулируемого параметра на установившийся автоколебательный режим, чему соответствует Tn11≤0.9·Tn10 (фиг.6), (т.е. изменение длительности нижней полуволны менее 10% по сравнению с предыдущим автоколебанием). Регулятор переходит в режим ожидания смены уровня управляющего воздействия y с низкого на высокий. В случае, если запуск не является первым (внутренняя память контроллера P1, P2 не пуста), алгоритм переходит к выполнению этапа 5.
Этап 2
В ином случае (если пуск является первым) после перехода управляющего сигнала у из нижней позиции в верхнюю таймер включается в режиме подсчета импульсов с внешнего тактового генератора (в дальнейшем в режиме счетчика), на выходе (управляющий сигнал u) устанавливается высокий уровень напряжения, выключение таймера-счетчика происходит в момент изменения позиции входного сигнала у с верхней на нижнюю. Значение таймера счетчика Tu1 записывается во внутреннюю память микроконтроллера P1, управляющий сигнал u переключается в нижнюю позицию. Значение таймер-счетчика обнуляется и счетчик запускается вновь, останов счетчика происходит в момент изменения позиции релейного регулятора с нижней на верхнюю, значение счетчика Tn1 записывается во внутреннюю память P2, выходной сигнал приставки устанавливается в верхнюю позицию, значение таймера-счетчика обнуляется.
Этап 3
Из внутренней памяти P1 извлекается значение Tu1. Сигнал управления u устанавливается в верхнюю позицию. Таймер-счетчик запускается в режиме таймера на длительность Tu2=Tu1·m (где m=0.8), если входной сигнал изменяется с 1 на 0, то в течение этого промежутка выполнение алгоритма возвращается к этапу 2, т.е. к измерению длительностей Tu1 и Tn1 (ячейки внутренней памяти P1 и P2 обнуляются). Выбор коэффициента m=0.8 обусловлен реальным значением отношения номинальной нагрузки к максимальной. После истечения этого времени сигнал управления и переводится в нижнюю позицию, таймер-счетчик включается в режиме таймера на время Tu1·(m1-m), где  . Увеличение времени ожидания обусловлено возможным замедлением скорости нарастания регулируемого параметра (фиг.7). Если в течение этого времени произошло изменение фронта входного сигнала с высокого на низкий, то выполнение переходит к началу этапа 4, в ином случае (если изменения не произошло) значение m увеличивается на величину шага Δ, сигнал управления u устанавливается в верхнюю позицию до момента переключения входного сигнала y с верхней на нижнюю позицию. После изменения позиции управляющий сигнал u с приставки переходит в нижнюю позицию до момента изменения позиции входного сигнала y с нижней на верхнюю. Выполнение возвращается к началу этапа 2.
. Увеличение времени ожидания обусловлено возможным замедлением скорости нарастания регулируемого параметра (фиг.7). Если в течение этого времени произошло изменение фронта входного сигнала с высокого на низкий, то выполнение переходит к началу этапа 4, в ином случае (если изменения не произошло) значение m увеличивается на величину шага Δ, сигнал управления u устанавливается в верхнюю позицию до момента переключения входного сигнала y с верхней на нижнюю позицию. После изменения позиции управляющий сигнал u с приставки переходит в нижнюю позицию до момента изменения позиции входного сигнала y с нижней на верхнюю. Выполнение возвращается к началу этапа 2.
Этап 4
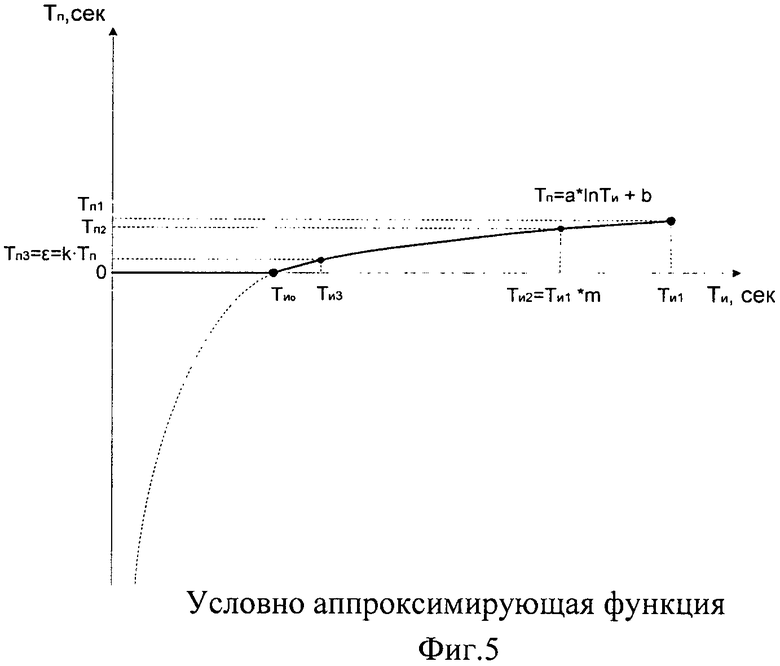
После перехода входного сигнала y в нижнюю позицию таймер-счетчик включается в режиме счетчика. Останов счетчика происходит при переключении позиции входного сигнала с нижней на верхнюю, при этом событии на выходе устанавливается верхняя позиция. Значение счетчика Tn2 заносится во внутреннюю память контроллера P3, счетчик обнуляется. Происходит обработка информации и построение условно-аппроксимирующей функции. Условно-аппроксимирующая функция ищется в виде Tn=a·ln(Tu)+b (1), возможно использование линейной аппроксимирующей функции в виде Tn=a·(Tu)+b (2). Выбор условно-аппроксимирующей функции обусловлен тем, что реальная статическая характеристика, отражающая зависимость длительности верхней полуволны Tn управляемой переменной от длительности управляющего импульса Tu, наилучшим способом описывается именно логарифмической функцией. Измеренные данные (Tu1, Tn1, Tn2, Tu2) извлекаются из внутренней памяти контроллера P1, P2, P3. Коэффициенты a и b находятся из систем уравнений (1) и (2) по формулам (9) или (10).






После вычисления коэффициентов a и b, вычисляется значение Tu3 в некоторой ε-окрестности точки оптимума Tu0 (ε=k·Tn1, где k - коэффициент качества адаптации 0≤n≤1). Номинальный режим работы в точке оптимума подразумевает подачу сигнала управления u такой длительности Tu0, при которой Tn=0. В реальности оптимум труднодостижим поскольку точка оптимума из-за внешних воздействий плавает. Поэтому стремление к точке оптимума в условиях минимума информации может привести к выходу процесса из автоколебательной устойчивости. После этого по формуле 11 вычисляется значение коэффициента адаптации l. Выполнение переходит к этапу 5.
Этап 5
После изменения позиции входного сигнала y с нижней на верхнюю управляющий сигнал u устанавливается в верхнюю позицию, таймер-счетчик обнуляется и запускается в режиме таймера на время l·Tu1, по прошествии которого осуществляется программное прерывание от таймера, позиция управляющего сигнала и переводится в нижнюю, значение таймера обнуляется, таймер запускается вновь на время (m1-l)·Tu1. В течение этого времени микроконтроллер опрашивает состояние входа и в случае изменения позиции входного сигнала y с верхней на нижнюю таймер обнуляется в случае, если ячейка внутренней памяти P4 пуста выполнение переходит к этапу 6, в ином случае - к этапу 7. Если изменения не произошло, коэффициент адаптации увеличивается l:=l+2Δ, значение таймера сбрасывается.
Выполнение возвращается к началу этапа 5.
Этап 6
После изменения положения входного сигнала у с верхнего на нижнее, таймер-счетчик включается в режиме счетчика, останов происходит при изменении фронта входного сигнала y с 0 на 1. Сигнал управления и устанавливается в верхнюю позицию. Из ячейки внутренней памяти P2 извлекается значение Tn1. Текущее значение таймера-счетчика Tn3 сравнивается с k·Tn1 (где k - коэффициент качества адаптации). Если Tn3>k·Tn1 и на предыдущем этапе не происходила перенастройка l, то значение l уменьшается на величину шага l:=l-Δ, выполнение возвращается к этапу 5. Если Tn3>k·Tn1, но на предыдущем этапе происходила перенастройка l, то выполнение возвращается к этапу 5. Если Tn3≤k·Tn3 и на предыдущем этапе не происходила перенастройка l, то текущее значение таймера счетчика сохраняется в P4, а выполнение возвращается к этапу 5. Если Tn3≤k·Tn1, но на предыдущем этапе происходила перенастройка l, то выполнение возвращается к этапу 5.
Этап 7
Во время исполнения этого этапа непрерывно опрашивается положение позиции входного сигнала y, при изменении которой с нижней на верхнюю происходит очистка ячейки внутренней памяти P4 и переход к выполнению этапа 5. Из внутренней ячейки памяти Р4 извлекается значение Tn3. Таймер-счетчик включается в режиме таймера на время m·Tn3. После истечения этого времени положение позиции выходного каскада переводится в верхнюю позицию. Из ячейки внутренней памяти P1 извлекается значение Tu1.Таймер обнуляется и запускается в режиме отсчета времени l·(l-m)·Tu1 (фиг.8), по прошествии которого управляющее воздействие и переводится в нижнюю позиции, таймер останавливается и обнуляется. Выполнение переходит к этапу 5. Графическое пояснение этапа 7 на (фиг.8).
При останове объекта управления 10 выполнение алгоритма переходит к начальному этапу.
Достигаемый технический результат заключается нахождении управляющего воздействия такой длительности, которое уменьшает длительность полуволн автоколебаний, что приводит к уменьшению амплитуды автоколебаний и энергосбережению.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2498386C1 |
| СПОСОБ АДАПТИВНОГО ТРЕХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2474856C1 |
| СПОСОБ РЕАЛИЗАЦИИ ДВУХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2007 |
|
RU2362198C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2144690C1 |
| Способ автоматического группового управления возбуждением синхронных генераторов электростанции | 1990 |
|
SU1778863A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2158435C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2129726C1 |
| АДАПТИВНАЯ ПРИСТАВКА К ДВУХПОЗИЦИОННОМУ РЕГУЛЯТОРУ | 2010 |
|
RU2424545C1 |
| ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1992 |
|
RU2047210C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2155361C2 |

Изобретение относится к автоматическому управлению, а именно к адаптивным системам двухпозиционного автоматического управления. Техническим результатом является нахождение управляющего воздействия такой длительности, которое уменьшает длительность полуволн автоколебаний, что приводит к уменьшению амплитуды автоколебаний и энергосбережению. Он достигается путем подачи на исполнительное устройство управляющего воздействия следующего вида: если регулируемая переменная пересекает линию задания сверху вниз, то длительность воздействия адаптированного выходного сигнала управления, поданного на исполнительное устройство, определяется интервалом времени l·Tu1, где l - коэффициент адаптации, a Tu1 - длительность нижней полуволны автоколебательного режима при двухпозиционном регулировании, если же пересечение линии задания регулируемой переменной происходит снизу вверх, то исполнительное устройство включается по прошествии интервала m·Тn3 на импульс предварения l·(l-m)·Tu1, где m - коэффициент отношения номинальной нагрузки к реальной, Тn3 - текущее значение верхней полуволны автоколебательного режима при двухпозиционном регулировании. 2 н.п. ф-лы, 9 ил.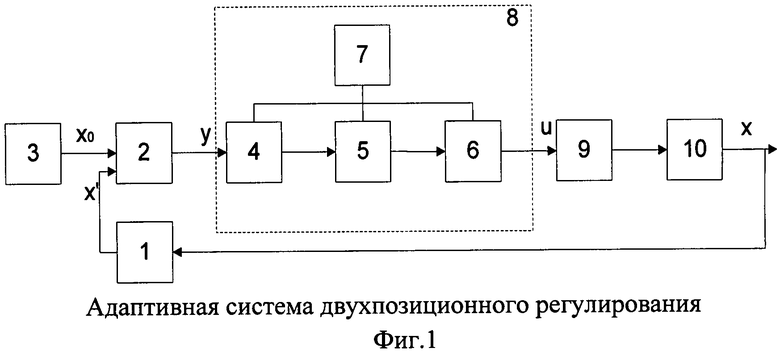
1. Микропроцессорная двухпозиционная система регулирования, содержащая последовательно соединенный задатчик, релейный элемент с двумя управляющими обмотками, причем первая из них связана с выходом задатчика, адаптивный регулятор, исполнительное устройство, объект управления и датчик соединенный своим выходом со второй обмоткой релейного элемента, отличающаяся тем, что в структуру системы введен интеллектуальный регулятор, все элементы которого связаны по питанию с блоком питания, состоящий из противодребезговой схемы, вход которой является одновременно входом адаптивного регулятора, соединенного с выходом релейного элемента, а выход со входом микроконтроллера, связанного своим выходом с входом выходного каскада, представляющего собой усилитель мощности, выход которого является одновременно, выходом адаптивного регулятора, связанного с исполнительным устройством.
2. Способ автоматического двухпозиционного регулирования, основанный на адаптации длительности управляющего воздействия с постоянным шагом Δ, к текущей нагрузке объекта управления с использованием двухпозиционных сигналов на выходе и на входе адаптивного регулятора, отличающийся тем, что введенная с помощью микроконтроллера, входящего в структуру адаптивного регулятора, условно-аппроксимирующая функция форсирует процесс адаптации, позволяя вычислить значение длительности импульса Тu3 на начальном этапе регулирования в некоторой ε окрестности точки оптимума Тu0, и соответственно начать адаптацию с этого значения, причем адаптация управляющего воздействия длится до тех пор, пока текущее значение верхней полуволны не станет меньше начального значения полуволны, умноженного на коэффициент качества адаптации k, после чего логика управления исполнительным устройством с помощью выходного сигнала регулятора состоит в следующем: если регулируемая переменная пересекает линию задания сверху вниз, то длительность воздействия адаптированного выходного сигнала управления, поданного на исполнительное устройство, определяется интервалом времени l·Tul, где l - коэффициент адаптации, a Tul - длительность нижней полуволны автоколебательного режима при двухпозиционном регулировании, если же пересечение линии задания регулируемой переменной происходит снизу вверх, то исполнительное устройство включается по прошествии интервала m·Тn3 на импульс предварения l·(l-m)·Tul, где m - коэффициент отношения номинальной нагрузки к реальной, Tnl - длительность верхней полуволны автоколебательного режима при двухпозиционном регулировании.
| KAMПЕ-HEMM A.A | |||
| Автоматическое двухпозиционное регулирование | |||
| - М.: Наука, 1967, с.6-7 | |||
| СПОСОБ РЕАЛИЗАЦИИ ДВУХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2007 |
|
RU2362198C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2155361C2 |
| Насос | 1917 |
|
SU13A1 |

