Изобретение относится к транспортным средствам с движителями, взаимодействующими с поверхностью дороги, а именно устройствам для перемещения объектов (грузов) преимущественно по горизонтальной поверхности, и может быть использовано в качестве приводной подвижной опоры напольного высокоманевренного транспортного средства (ТС), а также в виде одноопорного самоходного балансирующего ТС.
Известны технические решения движителей ТС, которые в опорной части используют колесо шарообразной формы [1, 2, 3, 4].
В известном техническом решении (RU 2197403, МПК7 B62D 9/04, опубл. 27.01.2003) колеса движителя ТС выполнены сферическими, неповоротными с изменяемым наклоном, осуществляемым с помощью трапеций автомобильного типа, установленными в вертикальной плоскости и перпендикулярно направлению движения ТС. В конструкции движителя предусмотрена передача крутящего момента на все колеса от общего двигателя. При этом трансмиссия выполнена без дифференциалов. Подвижность и маневренность обеспечиваются при изменении наклона колес и повороте сочлененной рамы [1].
К недостаткам известного транспортного средства следует отнести то, что при выполнении маневров наклоны каждой пары колес обоих мостов должны быть синхронизированы друг с другом и с углом излома на сочленении рамы вездехода, а также то, что платформа должна совершать наклон в сторону поворота.
Другое известное техническое решение, предложенное инженером Кашаровым, обеспечивает большие подвижность и маневренность при использовании в нем колес сферической формы. Общеизвестным примером, выполненным на основе этого движителя, является механизм, получивший название «Шароход инженера Кашарова» (Техника-молодежи. 1982 г., №7, с. 6-10). Основной элемент шарохода - это несколько оснащенных двигателями тележек со сферическими роликами, установленными в специальных вращающихся обоймах.
В механизме инженера Кашарова перемещение тележек сопровождается одновременным вращением обойм и шаров внутри них, что приводит к чередованию пар шаров, находящихся в контакте с опорной поверхностью. Это вызывает неустойчивость тележек при движении. Кроме того, в целом механизм является сложным по конструкции, поскольку имеет в своем составе как минимум три тележки с четырьмя сферическими роликами в каждой [2].
Техническое решение, известное как «Robot Balancing on a Ball», является более простым и выполнено с использованием одного опорного элемента сферической формы. Устройство содержит опорный шар и опирающиеся на него три омни-колеса, соединенные с приводными двигателями (International Conference on Control, Automation and Systems 2008. Oct. 14-17, 2008 in COEX, Seoul, Korea).
Устройство обладает тем недостатком, что обод омни-колес составлен из нескольких свободно вращающихся бочкообразных роликов, которые при перекатывании по опорному шару контактируют с шаром точками поверхности с постоянно изменяющимся радиусом кривизны. Это обусловливает непостоянство условий контакта роликов с опорным шаром и ухудшает кинематику механизма [3].
Наиболее близким техническим решением к заявленному изобретению является шаровая колесная опора «Шар-колесо Калинкина» (RU 2505447, МПК B62D 57/028, В60B 19/14, опубл. 27.01.2014), имеющая в своем составе держатель и опорный шар, роликовые опоры, выполненные в виде попарно установленных и кинематически соединенных шпинделей с роликами. Поскольку ролики в роликовых опорах имеют, как и опорный шар, сферическую форму, то условия контакта роликов и опорного шара остаются при работе устройства постоянными [4].
Однако функционально известная шаровая колесная опора может работать только как пассивная (неприводная) колесная опора ТС, что значительно ограничивает ее функциональные возможности.
Технической задачей, на решение которой направлено заявленное техническое решение, является расширение функциональных возможностей шаровой колесной опоры.
Для достижения этой задачи в известном устройстве с использованием шарообразного колеса, имеющем в своем составе держатель и опорный шар, роликовые опоры, выполненные в виде попарно установленных и кинематически соединенных между собой шпинделей с роликами, дополнительно каждая из пар шпинделей снабжена приводным модулем, установленным в гнезде на держателе и кинематически связанным со шпинделями, каждый из приводных модулей имеет в своем составе датчики перемещений (энкодеры). Кроме этого, шароколесный движитель оснащен источником питания и микроконтроллером с подключенной к нему бортовой вычислительной сетью, выполненной с возможностью подачи управляющих воздействий на приводные модули, а также сбора и обработки данных с датчиков перемещений (энкодеров).
Благодаря наличию перечисленных конструктивных признаков в предлагаемом устройстве вращение и крутящий момент, создаваемый приводными модулями, передаются на шпиндели, роликовые опоры, а затем и на опорный шар, что создает движущую силу для перемещения ТС. При этом за счет согласованного изменения направлений и частот вращения шпинделей шароколесный движитель обеспечивает возможность движения ТС в любом направлении как на плоской, так и на неровной поверхности без применения каких-либо рулевых механизмов. Транспортное средство, оснащенное, как минимум, двумя предлагаемыми шароколесными движителями, приобретает возможность выполнять любой сложности поступательные и вращательные движения, а также сочетать одновременно движения по прямой, кривой любой конфигурации, и вращении на плоскости. Кроме того, шароколесный движитель, выполненный в виде отдельного модуля (не в составе ТС), может самостоятельно функционировать как одноопорное самоходное балансирующее ТС.
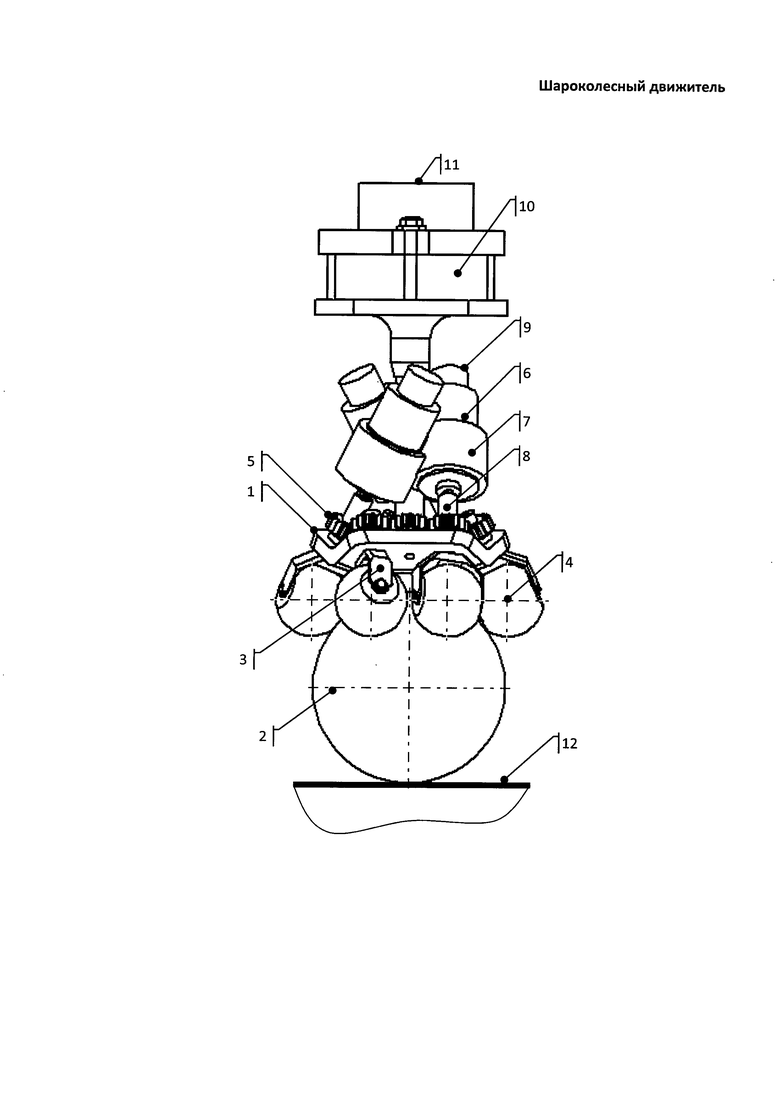
Предлагаемый шароколесный движитель иллюстрируется чертежом, где представлен его общий вид.
Шароколесный движитель содержит держатель 1, опорный шар 2, шпиндели 3 с роликами 4. Шпиндели 3 попарно кинематически соединены, например, с помощью зубчатой передачи 5. Каждая из пар шпинделей снабжена приводным модулем 6, установленным в гнездах 7 на держателе 1 и кинематически связанным, например, посредством присоединения к выходному концу 8 шпинделей, а каждый из приводных модулей 6 имеет в своем составе датчики перемещений 9. Для обеспечения и согласования работы приводных модулей 6 предлагаемый шароколесный движитель оснащен источником питания 10 и микроконтроллером 11 с подключенной к нему бортовой вычислительной сетью (не показана). При работе шароколесного движителя опорный шар 2 контактирует с поверхностью 12.
Работа шароколесного движителя происходит следующим образом.
При отсутствии движения внешняя нагрузка, например, от силы веса транспортируемого объекта передается на держатель 1 и далее через шпиндели 3, ролики 4 на опорный шар 2 и воспринимается поверхностью 12.
Для осуществления перемещения шароколесного движителя (и опирающегося на него ТС, которое не показано) в микроконтроллере 11 формируются согласованные управляющие воздействия, которые поступают на приводные модули 6, обеспечивающие вращение шпинделей 3 с определенной скоростью и в заданном направлении. Вращение через шпиндели 3 и зубчатые передачи 5 передается на ролики 4. Ролики 4 взаимодействуют с опорным шаром 2, передают ему крутящий момент и вызывают перекатывание опорного шара по поверхности 12. Питание приводных модулей 6 происходит от источника питания 10. Одновременно в микроконтроллере 11 производится контроль отработки перемещений по сигналам обратной связи, поступающим с датчиков перемещений 9. При этом траектория, направление движения и скорость перемещения определяются соотношением уровней и значений управляющих воздействий на приводных модулях 6.
При движения внешняя нагрузка, например, от силы веса транспортируемого объекта также передается на держатель 1 и далее через шпиндели 3, ролики 4 на опорный шар 2 и воспринимается поверхностью 12.
Таким образом, предлагаемый шароколесный движитель за счет выполнения роликовых опор приводными, оснащения их датчиками перемещений (энкодерами), а в целом шароколесного движителя - микроконтроллером обеспечивает двигательную способность, дает возможность реализовать более широкий диапазон возможных траекторий перемещений по сравнению с другими подобными устройствами, что расширяет его функциональные возможности.
Источники информации
1. Пат. 2197403, Российская Федерация. МПК7 B62D 9/04. Система управления двухсекционного сочлененного вездеходного транспортного средства и его трансмиссия / С.С. Кочанов-Сорокин; заявитель и правообладатель С.С. Кочанов-Сорокин №2001108175/28; заявл. 26.03.2001; опубл. 27.01.2003.
2. Шароход Кашарова. Техника-молодежи. №7,1982 г., с. 6-10.
3. Development of a Robot Balancing on a Ball. Masaaki Kumagai, Takaya Ochiai. International Conference on Control, Automation and Systems 2008. Oct. 14-17, 2008 in COEX, Seoul, Korea.
4. Пат. 2505447, Российская Федерация. МПК B62D 57/028, В60B 19/14. Шар-колесо Калинкина / А.А. Калинкин; заявитель и правообладатель ФГБОУ ВПО "Ижевский государственный технический университет имени М.Т. Калашникова", А.А. Калинкин №2012111897/11; заявл. 27.03.2012; опубл. 27.01.2014.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАР-КОЛЕСО КАЛИНКИНА | 2012 |
|
RU2505447C2 |
| БЕСКОНТАКТНАЯ ШАРОВАЯ КОЛЕСНАЯ ОПОРА | 2014 |
|
RU2593222C2 |
| Омниколесная роботизированная грузовая тележка | 2020 |
|
RU2736553C1 |
| ЭЛЕКТРОДВИЖИТЕЛЬ | 2020 |
|
RU2728275C2 |
| Привод транспортного средства с двухпоточным бесступенчатым механизмом передач и поворота | 2016 |
|
RU2652371C1 |
| Крепление универсального модуля на автомобиль | 2020 |
|
RU2739628C1 |
| ШАССИ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО РАЗЛИЧНЫМ ОПОРНЫМ ПОВЕРХНОСТЯМ С КОЛЕСНО-ШАГОВЫМИ ДВИЖИТЕЛЯМИ | 2015 |
|
RU2628285C2 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| Колёсно-гусеничное шасси транспортного средства повышенной проходимости | 2022 |
|
RU2787607C1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
Изобретение относится к транспортным средствам с движителями, взаимодействующими с поверхностью дороги. Шароколесный движитель содержит держатель и опорный шар, роликовые опоры, выполненные в виде попарно установленных и кинематически соединенных между собой шпинделей с роликами. Дополнительно каждая из пар шпинделей снабжена приводным модулем, установленным в гнезде на держателе и кинематически связанным со шпинделями. Каждый из приводных модулей имеет в своем составе датчики перемещений, при этом шароколесный движитель оснащен источником питания и микроконтроллером с подключенной к нему бортовой вычислительной сетью, выполненной с возможностью подачи управляющих воздействий на приводные модули, а также сбора и обработки данных с датчиков перемещений. Техническая задача - расширение функциональных возможностей шаровой колесной опоры. 1 ил.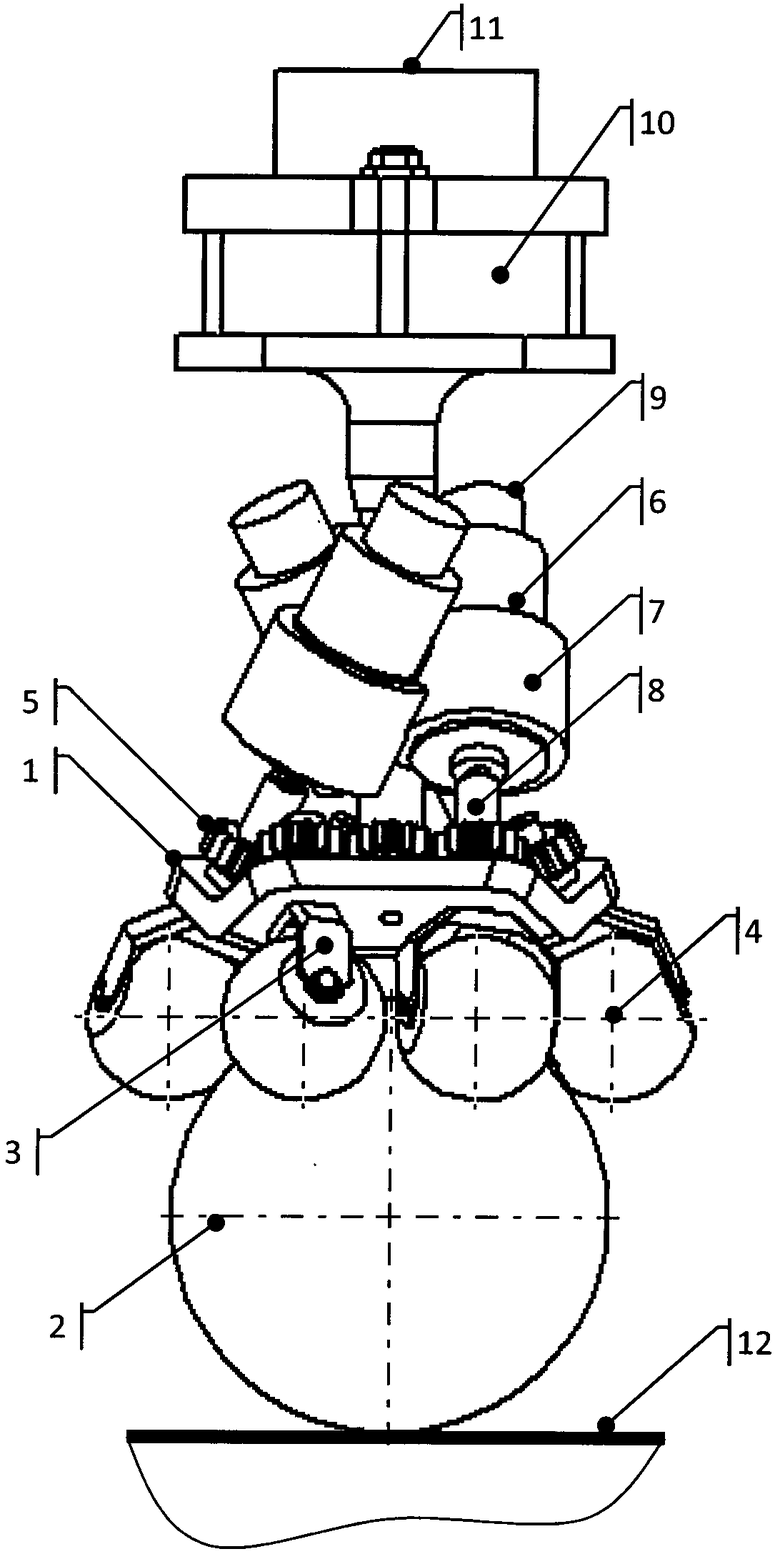
Шароколесный движитель, содержащий держатель и опорный шар, роликовые опоры, выполненные в виде попарно установленных и кинематически соединенных между собой шпинделей с роликами, отличающийся тем, что дополнительно каждая из пар шпинделей снабжена приводным модулем, установленным в гнезде на держателе и кинематически связанным со шпинделями, каждый из приводных модулей имеет в своем составе датчики перемещений, при этом шароколесный движитель оснащен источником питания и микроконтроллером с подключенной к нему бортовой вычислительной сетью, выполненной с возможностью подачи управляющих воздействий на приводные модули, а также сбора и обработки данных с датчиков перемещений.
| CN 101085626 A, 12.12.2007 | |||
| JP 2005075328 A, 24.03.2005 | |||
| JP 2004024329 A, 29.01.2004 | |||
| Движитель транспортного средства | 1976 |
|
SU823211A1 |

