Заявляемые технические решения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для защиты от импульсных, в том числе ответных, помех.
Большие проблемы работе РЛС создают импульсные помехи со структурой, близкой к структуре зондирующего сигнала. Для постановщика помех импульсная помеха является наиболее энергетически выгодной. Частным случаем импульсных помех являются ответные помехи (Защита от радиопомех, под ред. М.В. Максимова, М. Сов. Радио, 1976 г, с. 60), которые излучают только после приема постановщиком ответной помехи (ПОП) зондирующего сигнала, и импульсные помехи, которые излучают независимо от приема зондирующего сигнала на основе ранее разведанных параметров РЛС. В результате действия импульсных помех происходят ложные обнаружения целей, так как принятые сигналы таких помех не отличаются по структуре от сигналов, отраженных от реальных целей. Высокая эффективность импульсной и, в частности, ответной помехи достигается тем, что постановщик помехи излучает усиленную копию зондирующего сигнала независимо от его уровня. Это при радиолокационном обзоре пространства обеспечивает ее обнаружение не только в главном луче, но и по боковым лепесткам диаграммы направленности антенны (ДНА), в результате чего во всей зоне обзора создается большое число ложных целей, хаотических или неподвижных, в простейшем случае, либо движущихся с установленной постановщиком помехи скоростью. Во всех случаях ложные цели воспринимаются как реальные, поэтому по ним выполняют захват и завязку трассы (С.З. Кузьмин - Основы проектирования систем цифровой обработки радиолокационной информации, с. 109) с последующим ее сбросом в случае ложных целей, формируемых несинхронной импульсной помехой. В результате ответная помеха приводит к перегрузке устройств обработки сигнала и сопровождения трасс целей.
Наиболее сложной является задача выделения реальных целей, маскируемых ложными, при действии ответной помехи в главном луче ДНА.
Известны способы защиты от помех, которые обеспечивают подавление помех в главном луче ДНА однопозиционной РЛС за счет применения АРУ, ограничения или компенсации (Теоретические основы радиолокации, под редакцией Я.Д. Ширмана, Сов. Радио, М. 1978 г, с. 298-302, 346-347), а также диаграммообразующие (патент RU 2291459 от 01.2006 г.).
Недостаток известных способов защиты от помех состоит в том, что в случае действия помехи с высоким уровнем мощности они не обеспечивают подавления помехи, поскольку она по своей структуре не отличается от сигналов, отраженных от реальных целей, а по уровню может значительно превосходить уровень этих сигналов.
Таким образом, известные способы защиты РЛС не обеспечивают подавление импульсных и ответных помех, имитирующих цель. Но исключить перегрузку устройств обработки и сопровождения трасс целей можно и без подавления помехи, если ее распознать.
Известен наиболее близкий способ различения (распознавания) сигналов (В.Н. Исаков. Статистическая теория радиотехнических систем - курс лекций. гл. 5.1, с. 1, 2), основанный на взаимокорреляционной обработке принимаемых сигналов с известными эталонными и определении типа сигнала с максимальным коэффициентом корреляции.
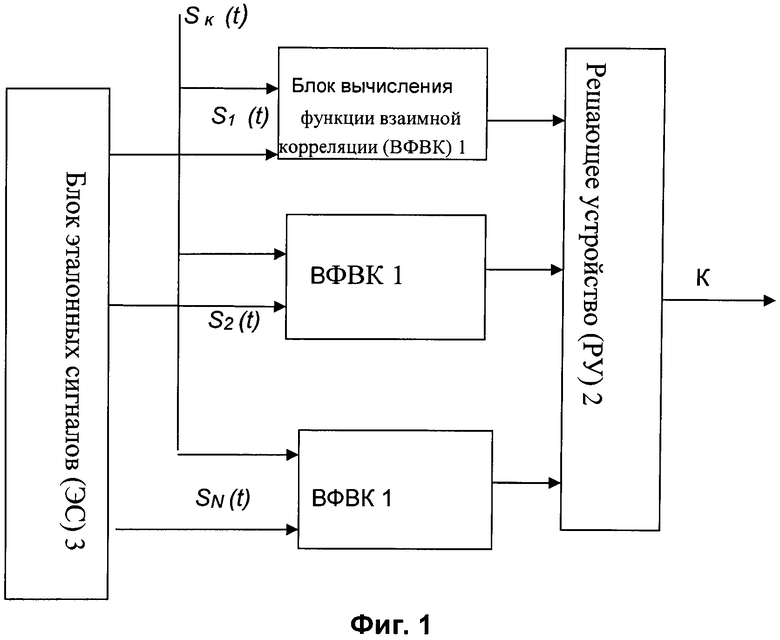
Известно наиболее близкое устройство различения (распознавания) (там же с. 1) (Фиг. 1), содержащее N блоков вычисления функций взаимной корреляции (ВФВК) 1, блок эталонных сигналов (ЭС) 3 и решающее устройство (РУ) 2. Первые входы ВФВК 1 соединены между собой, а вторые соединены с соответствующими выходами блока ЭС 3, выходы ВФВК 1 соединены с соответствующими входами РУ 2.
Суть способа и работа устройства заключается в том, что принимаемые сигналы в одном канале разделяются на N каналов и поступают на первые входы N блоков ВФВК 1, на вторые входы которых поступают эталонные сигналы Sk(t), где k=1…N, с соответствующих выходов блока ЭС 3. Эти сигналы соответствуют различным ожидаемым типам сигналов Sk(t). В блоках ВФВК 1 происходит определение функции взаимной корреляции сигналов и дальнейшая их обработка в решающем устройстве РУ 2, в котором определяется максимальная функция взаимной корреляции, которая и определяет конкретный тип принятого сигнала Sk(t) из всех ожидаемых.
Недостаток наиболее близкого способа состоит в необходимости заранее иметь известные эталонные сигналы. В рассматриваемом случае эталон сигнала, имитирующего цель, до начала работы ПОП не известен.
Таким образом поставленной задачей (техническим результатом) является распознавание радиолокационного сигнала, имитирующего цель, без заранее известного его эталона.
Задача решается на основе использования свойств сигналов, излученных из одной точки, определения и периодического уточнения в процессе работы параметров этих сигналов по полученным образцам и использование их в качестве эталонов сигналов, имитирующих цель.
Поставленная задача (технический результат) решается тем, что в способе распознавания радиолокационных сигналов, имитирующих цель, основанном на взаимокорреляционной обработке принимаемых сигналов, согласно изобретению обнаруживают сигнал Si(t), имитирующий цель, вычисляют его автокорреляционную функцию 

Поставленная задача (технический результат) решается также тем, что обнаруживают сигнал Si(t), имитирующий цель, в зоне, где прием отраженного от цели сигнала маловероятен или невозможен.
Поставленная задача (технический результат) решается также тем, что зоной, где прием отраженного от цели сигнала маловероятен или невозможен, считают зону, расположенную за пределами максимальной дальности РЛС или за пределами прямой видимости при просмотре пространства под малыми углами места.
Поставленная задача (технический результат) решается тем, что в устройство распознавания радиолокационных сигналов, имитирующих цель, содержащее ВФВК и РУ, выход ВФВК соединен с входом РУ, согласно изобретению введены блок весовой обработки (ВО), блок вычисления автокорреляционной функции (ВАКФ), блок задержки (БЗ), блок запоминания сигнала (ЗС), блок селекции сигналов, имитирующих цель, (СС) и синхронизатор, вход блока ВО является входом устройства, первый и второй выходы блока ВО соединены с соответствующими входами блоков ЗС и БЗ, первый выход БЗ соединен с первым входом ВФВК, а первый выход блока ЗС соединен с первым входом ВАКФ, второй выход блока ЗС соединен со вторым входом ВФВК, выходы ВАКФ и ВФВК соединены с первым и вторым входами РУ соответственно, выход РУ и второй выход БЗ соединены с первым и вторым входами блока СС соответственно, выход блока СС является выходом устройства, первый и второй выходы синхронизатора соединены со вторым входом блока ЗС и вторым входом ВАКФ.
Суть работы способа и устройства основывается на том, что принимают сигналы Ss(t) и подвергают их весовой обработке в блоке ВО. Все сигналы, принимаемые на всей дистанции в одном периоде, задерживают на величину периода повторения зонда в блоке БЗ. Но в блоке ЗС запоминают только сигнал Si(t), появляющийся на выходе блока ВО и принятый в зоне, где прием отраженного от цели сигнала маловероятен (за пределами максимальной дальности, где сигнал ниже порога обнаружения) или невозможен (вне зоны прямой видимости), считают его сигналом, имитирующим цель, вычисляют его функцию автокорреляции

Изобретение иллюстрируется чертежами:
Фиг. 1 - схема прототипа;
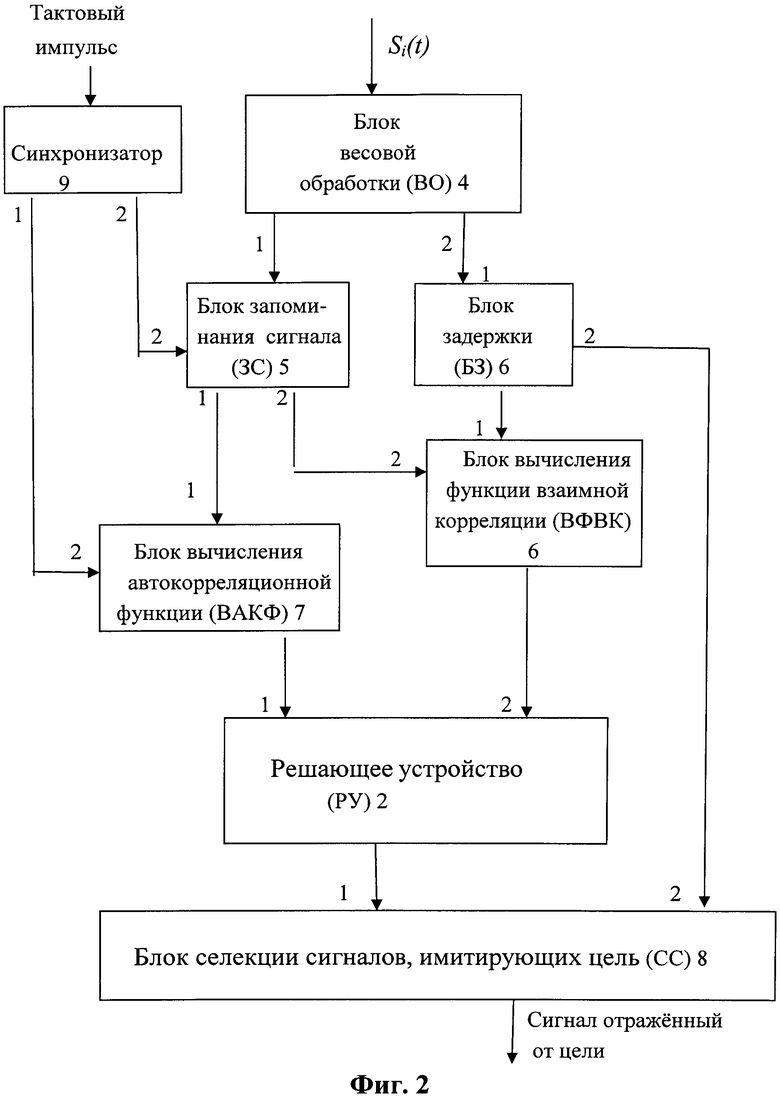
Фиг. 2 - схема предлагаемого устройства.
Заявленное устройство распознавания радиолокационных сигналов, имитирующих цель, содержит блок ВФКВ 1, решающее устройство 2, блок ВО 4, блок запоминания сигнала 5, блок задержки сигналов 6, блок ВАКФ 7, блок селекции сигналов, имитирующих цель 8, и синхронизатор 9, при этом вход блока ВО 4 является входом устройства, выход 1 блока ВО 4 соединен входом 1 блока ЗС 5, а выход 2 - с входом блока БЗ 6, выход 1 блока ЗС 5 соединен с входом 1 блока ВАКФ 7, а выход 2 соединен с входом 2 блока ВФВК 1, выходы блоков ВАКФ 7 и ВФВК 1 соединены соответственно с входами 1 и 2 РУ 2, его выход соединен с входом 1 блока СС 8, вход 2 которого соединен с выходом 2 блока БЗ 6, а его выход является выходом устройства, выходы 1 и 2 синхронизатора 9 соединены с соответствующими входами 2 PC 5 и ВАКФ 7.
Рассмотрим более подробно работу заявляемого устройства.
Принятые сигналы Ss(t) поступают на вход блока ВО 4, а с его выхода 1 поступают на вход 1 блока ЗС 5, где запоминается сигнал Si(t), принятый, например, в конце дистанции, кроме того сигналы с выхода 2 блока ВО 4 поступают на вход БЗ 6, где принятые на всей дистанции сигналы задерживаются на время, равное периоду повторения зонда, с выхода 1 блока ЗС 5 сигнал поступает на вход 1 ВАКФ 7, где вычисляется его автокорреляционная функция, она запоминается и сигнал далее поступает на вход 1 РУ2. Сигнал с выхода 2 блока ЗС 5 поступает на вход 2 блока ВФВК 1, а на его вход 1 поступает задержанный на период зонда сигнал с выхода 1 БЗ 6. Сигнал с выхода блока ВФВК 1 поступает на вход 2 РУ 2, где происходит распознавание сигналов, имитирующих цель. Эта информация поступает на вход 1 блока СС 8, а на его вход 2 поступают сигналы с выхода 2 БЗ 6. Прохождение сигналов, имитирующих цель, на выход СС 8 блокируется сигналом с выхода РУ 2. Момент запоминания сигнала Si(t) (например, в конце дистанции) и вычисление его автокорреляционной функции задает синхронизатор 9, запускаемый каждый период тактовым импульсом. Таким образом происходит распознавание сигналов, имитирующих цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569496C1 |
| Способ компенсации помех и радиолокационная станция для его осуществления | 2018 |
|
RU2704015C1 |
| Способ радиолокационного обзора пространства | 2015 |
|
RU2618675C1 |
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ ИСТОЧНИКА ИМПУЛЬСНОЙ ПОМЕХИ (ВАРИАНТЫ) И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2013 |
|
RU2538195C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ | 2008 |
|
RU2370785C1 |
| Способ всеракурсного распознавания в радиолокационной станции типового состава групповой воздушной цели при различных условиях полета и воздействии уводящих по скорости помех на основе калмановской фильтрации и нейронной сети | 2023 |
|
RU2816189C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ЦЕЛЕЙ НА ФОНЕ ПОМЕХ | 1998 |
|
RU2139552C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2015 |
|
RU2582088C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ПОСТАНОВЩИКА ПРИЦЕЛЬНОЙ ПО ЧАСТОТЕ ШУМОВОЙ ПОМЕХИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582081C1 |
| Способ компенсации помех и комплекс для его осуществления | 2018 |
|
RU2703999C1 |
Изобретения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для защиты от импульсных, в том числе ответных, помех. Достигаемый технический результат - распознавание радиолокационных сигналов, имитирующих цель без заранее известного его эталона. Указанный результат достигается тем, что в способе распознавания радиолокационных сигналов, имитирующих цель, основанном на взаимокорреляционной обработке принимаемых сигналов, обнаруживают сигнал Si(t), имитирующий цель, вычисляют его автокорреляционную функцию 
1. Способ распознавания радиолокационных сигналов, имитирующих цель, основанный на взаимокорреляционной обработке принимаемых сигналов, отличающийся тем, что обнаруживают сигнал Si(t), имитирующий цель, вычисляют его автокорреляционную функцию
2. Способ по п. 1, отличающийся тем, что обнаруживают сигнал Si(t), имитирующий цель, в зоне, где прием отраженного от цели сигнала маловероятен или невозможен.
3. Способ по п. 2, отличающийся тем, что зоной, где прием отраженного от цели сигнала маловероятен или невозможен, считают зону, расположенную за пределами максимальной дальности радиолокационной станции или за пределами прямой видимости при просмотре пространства под малыми углами места.
4. Устройство распознавания радиолокационных сигналов, имитирующих цель, содержащее блок вычисления функции взаимной корреляции (ВФВК) и решающее устройство (РУ), выход ВФВК соединен с входом РУ, отличающееся тем, что введены блок весовой обработки (ВО), блок вычисления автокорреляционной функции (ВАКФ), блок задержки (БЗ), блок запоминания сигнала (ЗС), блок селекции сигналов, имитирующих цель, (СС) и синхронизатор, вход блока ВО является входом устройства, первый и второй выходы блока ВО соединены с соответствующими входами ЗС и БЗ, первый выход БЗ соединен с первым входом ВФВК, а первый выход блока ЗС соединен с первым входом ВАКФ, второй выход блока ЗС соединен со вторым входом ВФВК, выходы ВАКФ и ВФВК соединены с первым и вторым входами РУ соответственно, выход РУ и второй выход БЗ соединены с первым и вторым входами блока СС соответственно, выход блока СС является выходом устройства, первый и второй выходы синхронизатора соединены со вторым входом блока ЗС и вторым входом ВАКФ соответственно.
| Теоретические основы радиолокации | |||
| Под ред | |||
| ШИРМАНА Я.Д | |||
| Москва, Советское Радио, 1978, с.298-302б346-347 | |||
| СПОСОБ ЗАЩИТЫ МОБИЛЬНЫХ СРЕДСТВ ОТ РАДИО, РАДИОЛОКАЦИОННЫХ, ОПТИКОЭЛЕКТРОННЫХ СРЕДСТВ РАЗВЕДКИ И ПОРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ КОМБИНИРОВАННЫХ ЛОЖНЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410710C2 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ ПРЕИМУЩЕСТВЕННО ДЛИТЕЛЬНЫМИ СИГНАЛАМИ | 2011 |
|
RU2504799C2 |
| СТАНЦИЯ ОДНОКРАТНЫХ ИМИТИРУЮЩИХ ПОМЕХ ДОПЛЕРОВСКИМ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2003 |
|
RU2258243C1 |
| JP 2009236628 A, 15.10.2009 | |||
| JP 2009258051, 16.04.2003 | |||
| US 6633251 B1, 14.10.2003 | |||
| US 5426433 A, 20.06.1995. | |||

