Заявляемые технические решения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для защиты от ответных помех.
Большие проблемы работе РЛС создают импульсные помехи со структурой, близкой к структуре зондирующего сигнала. Для постановщика помех импульсная помеха является наиболее энергетически выгодной. Частным случаем импульсных помех являются ответные помехи (Защита от радиопомех, под ред. М.В. Максимова, М. Сов. Радио, 1976 г, с. 60), которые излучаются только после приема постановщиком ответной помехи (ПОП) зондирующего сигнала, и импульсные помехи, которые излучают независимо от приема зондирующего сигнала на основе ранее разведанных параметров РЛС. В результате действия импульсных помех происходят ложные обнаружения целей, так как принятые сигналы таких помех не отличаются по структуре от сигналов, отраженных от реальных целей. Высокая эффективность импульсной и, в частности, ответной помехи достигается тем, что постановщик помехи излучает усиленную копию зондирующего сигнала независимо от его уровня. Это при радиолокационном обзоре пространства обеспечивает ее обнаружение не только в главном луче, но и по боковым лепесткам диаграммы направленности антенны (ДНА), в результате чего во всей зоне обзора создается большое число ложных целей, хаотических или неподвижных, в простейшем случае, либо движущихся с установленной постановщиком помехи скоростью. Во всех случаях ложные цели воспринимаются как реальные, поэтому по ним выполняют захват и завязку трассы (С.З. Кузьмин - Основы проектирования систем цифровой обработки радиолокационной информации, с. 109) с последующим ее сбросом в случае ложных целей, формируемых несинхронной импульсной помехой. В результате ответная помеха приводит к перегрузке устройств обработки сигнала и сопровождения трасс целей.
Наиболее сложной является задача выделения реальных целей, маскируемых ложными, при действии ответной помехи в главном луче ДНА.
Известны способы обработки радиолокационных сигналов, которые обеспечивают подавление помех в главном луче ДНА однопозиционной РЛС за счет применения АРУ, ограничения или компенсации (Теоретические основы радиолокации, под редакцией Я.Д. Ширмана, Сов. Радио, М. 1978 г, с. 298-302, 346-347), а также диаграммообразующие (патент RU 2291459 от 01.2006 г.).
Недостаток известных способов обработки радиолокационных сигналов для защиты от импульсных и синхронных ответных помех состоит в том, что в случае действия помехи с высоким уровнем мощности они не обеспечивают ее подавления, поскольку она по своей структуре практически не отличается от сигналов, отраженных от реальных целей, а по уровню может значительно превосходить уровень этих сигналов.
Таким образом, известные способы обработки радиолокационных сигналов не обеспечивают подавление помехи в главном луче ДНА. Но исключить перегрузку устройств обработки и сопровождения трасс целей можно и без подавления помехи, если распознать ложные цели, формируемые импульсной помехой.
Известен наиболее близкий к предлагаемому способ обработки радиолокационных сигналов (RU 2106653 С1), заключающийся в основной весовой обработке принимаемого колебания (сигнала) и дополнительной весовой обработке его после ограничения и принятии решения о наличии групповой неразрешаемой цели, если уровень сигнала после весовой обработки достигает значения U0i, а после дополнительной - ниже уровня Udi, соответствующего значению U0i, и, кроме того, выше уровня бокового лепестка сигнала с ограничением.
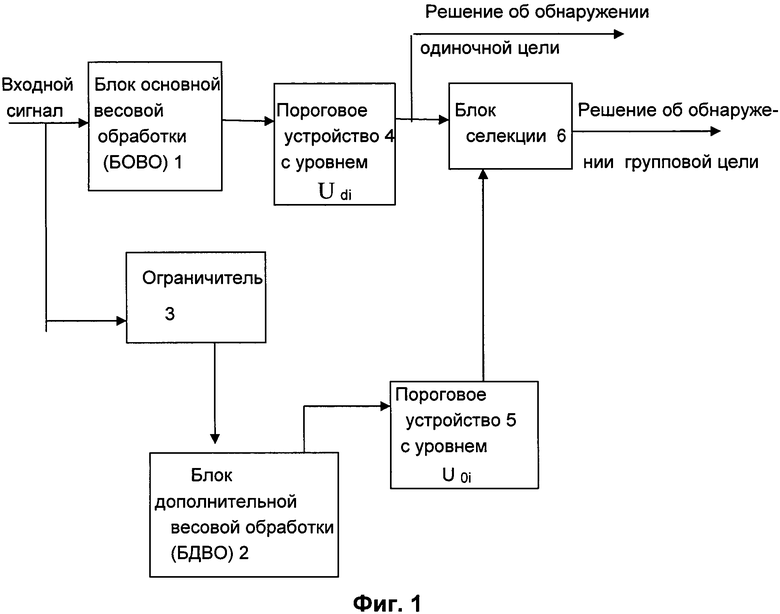
Известно (RU 2106653 С1), наиболее близкое к предлагаемому устройство (Фиг. 1), включающее блок основной весовой обработки (БОВО) 1, дополнительной весовой обработки (БДВО) 2, ограничитель 3, пороговое устройство 4 с уровнем порога Udi и пороговое устройство 5 с уровнем порога U0i, блок селекции 6, вход БОВО 1 соединен с входом ограничителя 3, выход БОВО 1 соединен с входом порогового устройства до 4, выход которого соединен с входом блока селекции 6, выход ограничителя 3 соединен с входом БДВО 2, выход которого соединен с пороговым устройством 5, выход порогового устройства 5 соединен с входом блока селекции 6.
Суть известного способа состоит в том, что проводят основную весовую обработку принимаемого сигнала с помощью БОВО 1 и сравнивают полученный сигнал в пороговом устройстве 4 с порогом U0i, проводят дополнительную весовую обработку сигнала после ограничителя 3 с помощью БДВО 2 и сравнивают полученный сигнал с порогом Udi, величина которого соответствует величине U0i. При этом, если принятый сигнал от одиночного объекта после основной обработки образует сигнал, величина которого достигает величины U0i, то сигнал после дополнительной обработки достигает величины Udi с вероятностью, определяемой уровнем шумов. При приеме же перекрывающихся сигналов от групповой цели того же уровня после основной обработки сигнал достигнет уровня U0i, а после ограничения будет ниже уровня Udi за счет взаимного их подавления. Это является признаком обнаружения группового объекта. Сигналы с выходов пороговых устройств 4 и 5 поступают на вход блока селекции 6, где и происходит селекция групповых целей.
Достоинство известных способа и устройства состоит в том, что они позволяют отличить групповую неразрешаемую цель от одиночной цели.
Недостаток известных способа и устройства состоит в том, что они не решают задачу распознавания ложных целей, создаваемых ответными помехами.
Таким образом поставленной задачей (техническим результатом) является распознавание ложных целей, создаваемых ответными помехами.
Эта задача решается на основе распознавания сигнала, заведомо имитирующего ложную цель, определения его параметров и использования их в качестве признаков ложных целей в возможной их совокупности с реальными.
Поставленная задача (технический результат) достигается тем, что в способе обработки радиолокационного сигнала, заключающемся в основной весовой обработке принимаемого сигнала, в дополнительной весовой обработке после его ограничения, согласно изобретению сигнал, принятый в зоне, в которой мала вероятность приема или невозможен прием отраженного сигнала от реальной цели, считают помехой, определяют его уровень после основной весовой обработки и дополнительной весовой обработки и эти уровни используют в качестве признака ложной цели в зоне обзора.
Поставленная задача (технический результат) достигается тем, что в устройство обработки радиолокационного сигнала, содержащее блок основной весовой обработки (БОВО), ограничитель, блок дополнительный весовой обработки (БДВО) и блок селекции, вход БОВО соединен с входом ограничителя, выход ограничителя соединен с входом БДВО, согласно изобретению дополнительно включены блок задержки (БЗ), два регистратора уровня (РУ), блок сравнения (БС), решающее устройство и синхронизатор, выход БОВО соединен с входом БЗ, первым входом первого РУ и первым входом блока селекции, выходы БЗ и первого РУ соединены с первым и вторым входами БС соответственно, выход БС соединен с первым входом решающего устройства, второй вход которого соединен с выходом второго РУ, выход решающего устройства соединен со вторым входом блока селекции. Вход синхронизатора соединен со вторым входом первого РУ и третьим входом решающего устройства.
Суть изобретения основывается на следующем. Во-первых, импульсная помеха ставится постановщиком помехи на всех интервалах дальности действия РЛС, в том числе и там, где прием отраженного сигнала невозможен или маловероятен. Причем ее уровень не будет зависеть от дальности, на которой она будет принята, поскольку она излучается из одной точки, точки расположения постановщика помех. Например, при осмотре РЛС зоны под нижними углами места прием сигналов от реальных целей, находящихся за пределами прямой видимости, невозможен (за исключением особого случая загоризонтных РЛС), а при осмотре участков зоны за пределами максимальной дальности действия РЛС прием сигнала от реальных целей маловероятен, поскольку уровень отраженного сигнала будет сравним или ниже уровня собственных шумов и вероятность тем ниже, чем дальше осматриваемый участок. Исходя из этого принятый в указанных зонах сигнал может быть только сигналом ложной цели.
Во-вторых, в силу вышеуказанных причин импульсы помехи, принятые на всех возможных для РЛС интервалах дальностей, будут иметь одинаковый уровень и это является первым признаком помехи (ложной цели). Реальная цель может быть принята за ложную только в том случае, если после весовой обработки уровень отраженного от нее сигнала будет равен уровню помехи. Однако при изменении направления движения или перемещении реальной цели уровень ее сигнала будет меняться и это позволит отличить ее от ложной.
Вторым признаком ложной цели является уровень сигнала после дополнительной весовой обработки с помощью БДВО. Этот уровень зависит от степени соответствия фазовой структуры сигнала структуре весовой обработки. Реальная цель состоит из набора неразрешаемых блестящих точек, поэтому отраженный от нее сигнал является копией зондирующего сигнала с искаженной фазовой структурой. Уровень ее сигнала после дополнительной весовой обработки будет ниже максимального, получаемого при отражении от одной блестящей точки (Справочник по радиолокации т. 3. Под ред. М. Скольник, 1979 г. с. 173). Каждый тип цели будет иметь индивидуальный набор блестящих точек, поэтому уровень сигнала после дополнительной весовой обработки будет зависеть от типа цели. Цели, уровень сигналов которых после дополнительной весовой обработки равен таковому для ложной цели, будут приняты за ложную. Если ответную помеху формируют путем переизлучения зондирующего сигнала без искажения фазовой структуры, то это эквивалентно точечной цели. Поэтому за ложную может быть принята точечная цель.
Если в качестве признака ложной цели принять одновременное наличие двух указанных выше признаков, то вероятность принятия реальной цели за ложную маловероятна. Это определяется тем, что наличие второго признака ложной цели, как указывалось, возможно для точечной цели, но эквивалентная отражающая поверхность реальной цели, близкой к точечной, не обеспечит выполнения первого признака - равенства уровней сигналов после основной весовой обработки.
Для ложных целей (размноженных и усиленных копий зондирующего сигнала, расположенных на любой дальности) будут иметь место оба признака, поскольку они сформированы путем излучения из одной точки.
Этим обеспечивается решение поставленной задачи и достигается технический результат.
Изобретение иллюстрируется чертежами:
фиг. 1 - устройство, реализующее способ-прототип;
фиг. 2 - заявленное устройство, реализующее заявленный способ.
Заявленное устройство для осуществления заявленного способа обработки радиолокационного сигнала (Фиг. 2) содержит блок основной весовой обработки (БОВО) 1, блок дополнительной весовой обработки (БДВО) 2, ограничитель 3, блок селекции 6, блок задержки (БЗ) 7, два регистратора уровня (РУ) 9 и РУ 11, блок сравнения (БС) 10, решающее устройство 12 и синхронизатор 13, вход БОВО 1 соединен с входом ограничителя 3, выход БОВО 1 соединен с входом БЗ 7, входом 1 РУ 9 и входом 1 устройства селекции 6, выходы БЗ 7 и РУ 9 соединены с 1, 2 входами БС 10 соответственно, выход БС 10 соединен с входом 1 решающего устройства 12, выход ограничителя 3 соединен с входом БДВО 2, выход которого соединен с входом РУ 11, а его выход соединен с входом 2 решающего устройства 12, выход которого соединен с входом 2 устройства селекции 6. Выход синхронизатора соединен с входом 2 РУ 9 и входом 3 решающего устройства 12.
Рассмотрим более подробно реализуемость способа (Фиг. 2) на конкретном примере.
Принятый сигнал поступает на вход БОВО 1 и вход ограничителя 3, с выхода БОВО 1 сигнал поступает на вход БЗ 7, вход 1 РУ 9 и вход 1 блока селекции 6, в БЗ 7 сигнал задерживается на время, равное периоду повторения зонда, а РУ 9 записывает сигнал только в конце периода повторения зонда, где прием сигнала от реальной цели маловероятен. Сигналы, поступающие с выхода блока задержки 7, сравниваются по уровню с сигналом регистратора 9 в блоке сравнения 10. Результаты сравнения поступают на вход решающего устройства 12. Если в потоке сигналов на выходе БЗ 7 есть сигналы, уровень которых равен уровню сигнала регистратора 9, то решающее устройство определяет их как сигналы ложных целей и выдает на блок селекции 6 сигнал, блокирующий прохождение сигнала с выхода БОВО 1. Если в потоке будет сигнал от точечной цели, то его уровень будет заведомо меньше уровня сигнала ложной цели благодаря ее малой отражающей поверхности.
В регистраторе уровня 11 определяется уровень каждого сигнала, прошедшего через ограничитель 3 и БДВО 2, а в решающем устройстве 12 этот сигнал оценивается по второму признаку: если уровень максимальный, то принимается решение о ложной цели, образованной синхронной ответной помехой или точечной целью. При этом окончательное решение устройство 12 принимает по результатам сравнения уровней сигналов в блоке сравнения 10.
Таким образом достигается заявленный технический результат (решается поставленная задача).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ, ИМИТИРУЮЩИХ ЦЕЛЬ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569490C1 |
| СПОСОБ ПОДАВЛЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ, ИМИТИРУЮЩИХ ЦЕЛЬ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2578505C1 |
| СПОСОБ ЗАЩИТЫ ОТ ИМПУЛЬСНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2556705C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ | 2016 |
|
RU2688899C2 |
| Способ пеленгации постановщика ответной помехи и радиолокационное устройство для его осуществления | 2016 |
|
RU2638317C2 |
| СПОСОБ ОБРАБОТКИ ПАКЕТА РАДИОИМПУЛЬСОВ | 2014 |
|
RU2557783C1 |
| ПРИЕМНОЕ УСТРОЙСТВО | 1985 |
|
RU2212041C2 |
| СПОСОБ РАСПОЗНАВАНИЯ СИГНАЛОВ ИСТОЧНИКА ИМПУЛЬСНОЙ ПОМЕХИ (ВАРИАНТЫ) И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2013 |
|
RU2538195C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2015 |
|
RU2582088C1 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СТОРОННИМ ПОДСВЕТОМ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2013 |
|
RU2563872C2 |
Заявляемые технические решения относятся к области радиолокации и могут быть использованы в радиолокационных станциях (РЛС) для защиты от ответных помех. Достигаемый технический результат - формирование признаков помехи и ее распознавание. Указанный результат достигается тем, что в способе обработки радиолокационного сигнала, заключающемся в основной весовой обработке принимаемого сигнала, в дополнительной весовой обработке после его ограничения, при этом сигнал, принятый в зоне, в которой мала вероятность приема или невозможен прием отраженного сигнала от реальной цели, считают помехой, определяют его уровень после основной весовой обработки и дополнительной весовой обработки и эти уровни используют в качестве признака ложной цели в зоне обзора. Указанный результат достигается тем, что устройство обработки радиолокационного сигнала содержит блок основной весовой обработки (БОВО), ограничитель, блок дополнительный весовой обработки (БДВО), блок селекции, блок задержки (БЗ), два регистратора уровня (РУ), блок сравнения (БС), решающее устройство и синхронизатор, при этом вход БОВО соединен с входом ограничителя, выход ограничителя соединен с входом БДВО, выход БОВО соединен с входом БЗ, первым входом первого РУ и первым входом блока селекции, выходы БЗ и первого РУ соединены с первым и вторым входами БС соответственно, выход БС соединен с первым входом решающего устройства, второй вход которого соединен с выходом второго РУ, выход решающего устройства соединен со вторым входом блока селекции, выход синхронизатора соединен со вторым входом первого РУ и третьим входом решающего устройства. 2 н.п. ф-лы, 2 ил.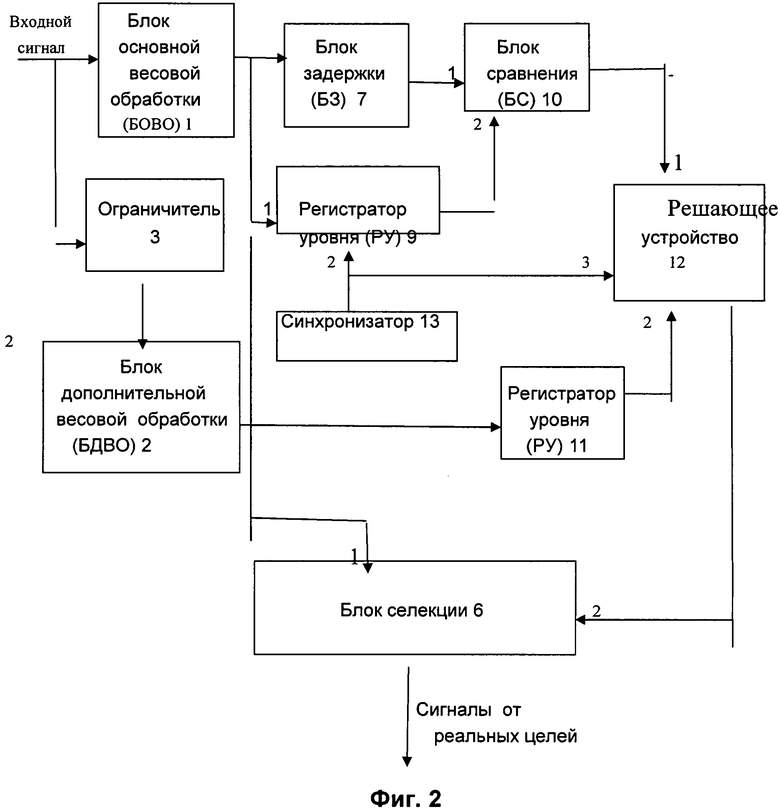
1. Способ обработки радиолокационного сигнала, заключающийся в основной весовой обработке принимаемого сигнала, в дополнительной весовой обработке после его ограничения, отличающийся тем, что сигнал, принятый в зоне, в которой мала вероятность приема или невозможен прием отраженного сигнала от реальной цели, считают сигналом ложной цели, определяют его уровни после основной весовой обработки и дополнительной весовой обработки и эти уровни используют в качестве признака ложной цели в режиме обзора, при этом первым признаком является равенство уровней принятых сигналов после основной весовой обработки на всех возможных для радиолокационной станции интервалах дальности, вторым признаком является равенство уровней сигналов, принятых после второй весовой обработки и соответствующих уровню от усиленной копии зондирующего сигнала, при наличии обоих признаков принимают решение о распознавании ложной цели, создаваемой ответной помехой.
2. Устройство для обработки радиолокационного сигнала, содержащие блок основной весовой обработки (БОВО), ограничитель, блок дополнительной весовой обработки (БДВО) и блок селекции, вход БОВО соединен с входом ограничителя, выход ограничителя соединен с входом БДВО, отличающееся тем, что дополнительно включены блок задержки (БЗ), два регистратора уровня (РУ), блок сравнения (БС), решающее устройство и синхронизатор, выход БОВО соединен с входом БЗ, первым входом первого РУ и первым входом блока селекции, выходы БЗ и первого РУ соединены с первым и вторым входами БС соответственно, выход БС соединен с первым входом решающего устройства, второй вход которого соединен с выходом второго РУ, выход решающего устройства соединен со вторым входом блока селекции, выход синхронизатора соединен со вторым входом первого РУ и третьим входом решающего устройства.
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 1996 |
|
RU2106653C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ В СИСТЕМАХ ЦИФРОВОЙ ОБРАБОТКИ (ВАРИАНТЫ) | 2009 |
|
RU2403585C2 |
| СПОСОБ СЕЛЕКЦИИ НАЗЕМНЫХ И ВОЗДУШНЫХ ОБЪЕКТОВ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2173881C2 |
| УСТРОЙСТВО УСТРАНЕНИЯ НЕОДНОЗНАЧНЫХ ИЗМЕРЕНИЙ ДАЛЬНОСТИ ДО ЦЕЛЕЙ, НАХОДЯЩИХСЯ ЗА ПРЕДЕЛАМИ РАБОЧЕЙ ЗОНЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2007 |
|
RU2358284C2 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ВЫБОРА ЦЕЛИ ИЗ ДАННЫХ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ | 2008 |
|
RU2463621C2 |
| JP 2011185798 A, 22.09.2011 | |||
| US 8446310 B2, 21.05.2013 | |||
| WO 2006078314 A2, 27.07.2006. | |||

