Изобретение относится к железнодорожному транспорту, в частности к автоматизированным системам, предназначенным для измерения динамических характеристик вагонов.
Анализ механизмов схода колес грузовых вагонов с рельсов показывает, что одной из причин являются неисправности деталей ходовых частей, в том числе и нарушения геометрии колес, которые обуславливают рост амплитуды поперечных перемещений кузова. Своевременное выявление и последующий вывод из эксплуатации вагонов, амплитуда поперечных колебаний которых во время движения превышает установленные нормы (вагонов с отрицательной динамикой), является важной составляющей системы обеспечения безопасности движения на железнодорожном транспорте.
Известен способ исследования динамики железнодорожного подвижного транспортного средства, заключающийся в измерении характеристических параметров динамики объекта наблюдения и в последующей математической обработке результатов измерений, измеряемые величины кинематических и динамических характеристик движения экипажа представляют в виде массивов мгновенных значений перегрузок, действующих на транспортное средство в направлении координатных осей в данном промежутке времени или на данном участке пути, интегрированием значений перегрузок определяют среднюю скорость движения экипажа, а также нормированный по этой скорости N-критерий, представляющий собой интегральное значение перегрузки для тех же пределов интегрирования, сравнивая значение N-критерия с эталонным для участка пути или транспортного средства, судят о динамических качествах объекта наблюдения (RU 2273013 C1, G01M 17/08, 30.08.2004).
Основным недостатком способа являются высокие затраты, связанные с необходимостью установки соответствующих датчиков и другой специальной аппаратуры на каждом вагоне поезда, а также необходимостью создания единой информационной сети на каждой подвижной единице.
Наиболее близким аналогом является способ обнаружения рельсовых транспортных средств с отрицательной динамикой, использующий триангуляционный принцип измерения. Известный способ включает использование двух установленных на заданном расстоянии лазеров, оптические оси которых направлены встречно и под углом к поверхности транспортного средства, а также телекамеру, установленную посредине между лазерными маркерами, перпендикулярно поверхности транспортного средства, при прохождении транспортного средства через зону контроля лазерные маркеры формируют в направлении борта объекта два пучка непрерывных немодулированных излучений, оси которых направлены под углами α к оптической оси телекамеры расположенной, в свою очередь, нормально к поверхности объекта, которые образуют на поверхности контролируемого объекта два световых пятна, расстояние d между ними связано с расстоянием до борта L следующим соотношением: L=(h-d)/2*tg(α), где h - база лазерных маркеров, при этом изображения световых пятен фиксируют телекамерой и на основе ее видеоизображения определяют расстояние d, по которому рассчитывают значение расстояния L до борта объекта, на основании совокупности кадровых значений L, полученных через равные интервалы времени для каждого транспортного средства в составе движущегося поезда, определяют динамические характеристики кузова, а именно, амплитуду поперечных колебаний кузова, которую находят из соотношения ΔL=Lмакс-Lмин, где Lмакс, Lмин - соответственно, максимальное и минимальное расстояния до борта, полученные во время прохождения транспортного средства через зону диагностики, если полученное значение ΔL превышает заданное допустимое значение, формируется сигнал тревоги, поступающий на устройство оповещения (RU 45976 U1, В61К 9/00, 28.01.2005).
Основным недостатком известного способа является малое количество точек измерения, приходящееся на один вагон (от 20 до 12 при скоростях от 50-80 км/ч, соответственно), который может иметь особенности конструктивного исполнения (раздвижные двери крытых вагонов, ребра жесткости, лестницы и т.п.), наличие аномалий вагонов (деформация и перекос кузова, загрязнение борта светопоглощающими материалами), что приводит к ошибкам выявлении колебаний. Достоверная идентификация колебаний в этих условиях без определения типа вагона не представляется возможной.
Технический результат предлагаемого способа заключается в повышении достоверности измеряемых величин поперечных перемещений, углов боковых и продольных качаний кузовов вагонов, входящих в состав движущегося подвижного состава.
Технический результат достигается тем, что способ обнаружения вагонов с отрицательной динамикой заключается в том, что на одном рельсе измерительного участка устанавливают два датчика счета осей на заданном расстоянии друг от друга, и 2D лидар, размещенный на высоте не менее 4700 мм на опоре, установленной на заданном расстоянии от оси ближайшего пути,
при прохождении подвижного состава через зону контроля измерительного участка с помощью датчиков счета осей регистрируют момент времени входа и выхода каждого вагона с измерительного участка, осуществляют подсчет осей проходящего подвижного состава и вычисляют скорость и ускорение каждого вагона, на основании полученных данных определяют тип вагонов в составе подвижного состава и порядок их следования, а с помощью 2D лидара измеряют расстояния до борта каждого вагона проходящего поезда на не менее 100 вертикальных срезов профиля борта, по результатам измерений строят 3D модель борта каждого вагона поезда, и уточняют особенности каждого вагона подвижного состава, определяют усредненное значение полуширины вагона ДВ и горизонты свободные от артефактов, из которых выбирают два горизонта, один - опорный Hог, на высоте ~2800 мм от головки рельса, а другой - уточняющий Hуг, первый из которых используют как основной горизонт, а второй – как подтверждающий, по данным проведенных измерений координат точек на основном и подтверждающем горизонтах проводят аппроксимацию полученной зависимости колебаний кузова вагона до гармонического закона, определяют результирующие амплитуды колебаний  и
и  соответственно на основном и подтверждающем горизонтах и вычисляют результирующую амплитуду и колебаний соответственно на основном и подтверждающем горизонтах, при этом амплитуду колебаний кузова на уточняющем горизонте приводят к значениям на опорном горизонте в соответствии с выражением:
соответственно на основном и подтверждающем горизонтах и вычисляют результирующую амплитуду и колебаний соответственно на основном и подтверждающем горизонтах, при этом амплитуду колебаний кузова на уточняющем горизонте приводят к значениям на опорном горизонте в соответствии с выражением:  ,
,
где  – корректирующий коэффициент;
– корректирующий коэффициент;  – высота расположения шкворня вагона, сравнивают значение амплитуды колебаний на опорном горизонте с нормированным значением амплитуды колебаний вагона и при превышении его определяют состояние вагона с отрицательной динамикой, при этом сведения о вагоне с отрицательной динамикой подвижного состава привязывают к его инвентарному номеру и сохраняют в базе данных.
– высота расположения шкворня вагона, сравнивают значение амплитуды колебаний на опорном горизонте с нормированным значением амплитуды колебаний вагона и при превышении его определяют состояние вагона с отрицательной динамикой, при этом сведения о вагоне с отрицательной динамикой подвижного состава привязывают к его инвентарному номеру и сохраняют в базе данных.
Для оперативного принятия решения данные о состоянии вагонов с отрицательной данных передают в диагностический центр.
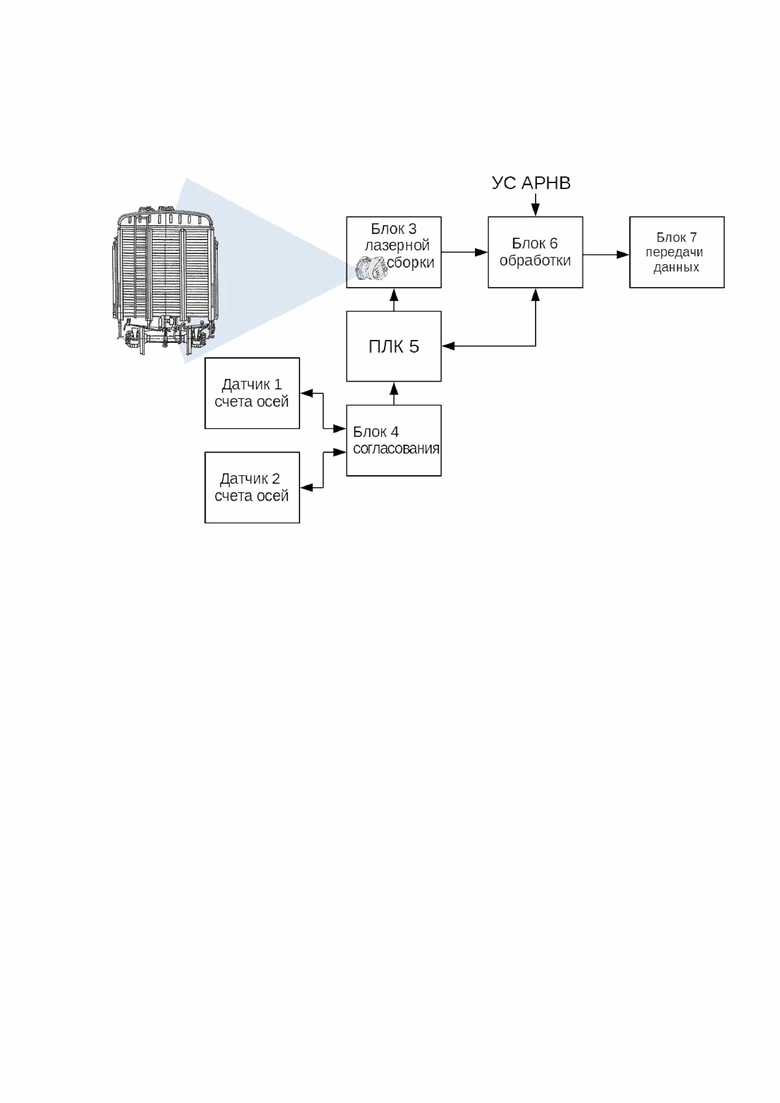
Сущность изобретения поясняется чертежом, на котором представлена структурная схема системы обнаружения вагонов с отрицательной динамикой, реализующая предлагаемый способ.
Система обнаружения вагонов с отрицательной динамикой содержит на измерительном участке два датчика 1 и 2 счета осей, установленные на одном рельсе на заданном расстоянии, например 1 м, друг от друга, и блок 3 лазерной сборки на основе 2D лидара, размещенный на высоте не менее 4700 мм на опоре, установленной на расстоянии не менее 3100 мм от оси ближайшего пути, последовательно соединенные блок 4 согласования и программируемый логический контроллер 5 (ПЛК 5), выход которого соединен с управляющим входом блок 3 лазерной сборки, блок 6 обработки данных, вход которого подключен к выходу блок 3 лазерной сборки, входы/выходы - к выходам/входам ПЛК 5, а выход – к входу блока 7 передачи данных, подключенного к сети передачи данных, для взаимодействия с аппаратно-программным устройством автоматизированного рабочего места оператора диспетчерского центра (на чертеже не указан).
При этом входы блока 4 согласования подключены к выходам датчиков 1 и 2 счета осей, вход блока 6 обработки данных соединен с внешней системой автоматизированного распознавания номеров вагонов (УС АРНВ) (на чертеже не показана). Блок 5 обработки выполнен в виде вычислителя.
Система реализует предлагаемый способ следующим образом.
При проходе подвижного состава зоны контроля измерительного участка датчики 1 и 2 начинают подсчет осей подвижного состава. Показания датчиков 1 и 2 через блок 4 согласования поступают в ПЛК 5. При поступлении показаний от датчика 1 ПЛК 5 включает в работу блок 3 лазерной сборки на основе 2D лидара, который начинает измерения расстояний до борта каждого вагона проходящего поезда.
По данным датчиков 1 и 2 счета осей ПЛК 5 осуществляет подсчет осей проходящего подвижного состава, регистрирует момент времени входа и выхода каждого вагона из зоны контроля измерительного участка, вычисляет скорость и ускорение каждого вагона и на основании полученных данных определяет тип вагона в составе поезда и порядок его следования, данные о которых передает в блок 6 обработки.
Блок 3 лазерной сборки на основе 2D лидара измеряет расстояния до борта каждого вагона проходящего поезда на не менее 100 вертикальных срезов профиля борта вагона и формирует массив данных, который передает в блок 6 обработки.
Блок 6 обработки на основе массива данных строит 3D модель борта каждого вагона поезда, на основе которой уточняет особенности каждого вагона подвижного состава, определяет усредненное значение полуширины вагона ДВ и горизонты свободные от артефактов, из которых выбирает два горизонта, один - опорный Hог, на высоте ~2800 мм от головки рельса, а другой - уточняющий Hуг. первый из которых использует как основной горизонт, а второй – как подтверждающий.
На основании проведенных измерений координат точек на основном и подтверждающем горизонтах блок 6 проводит аппроксимацию полученной зависимости колебаний кузова вагона до гармонического закона и определяет результирующие амплитуды колебаний и , соответственно на основном и подтверждающем горизонтах, при этом амплитуду колебаний кузова на уточняющем горизонте приводит к значениям на опорном горизонте в соответствии с выражением: ,
где – корректирующий коэффициент; – высота расположения шкворня вагона.
На основании полученных данных блок 6 уточняет амплитуду колебаний кузовов грузовых вагонов на опорной горизонте  , выявляет боковые составляющие колебаний вагонов, такие как качка, виляние и относ, и сравнивает с пороговыми значениями соответствующих параметров, на основании чего принимает решение о состоянии каждого вагона проходящего подвижного состава, данные о котором сохраняет. По результатам контроля вагонов подвижного состава блок 6 формирует отчет, в который вносится инвентарный номер каждого контролируемого грузового вагона, получаемый из внешней системы УС АРНВ.
, выявляет боковые составляющие колебаний вагонов, такие как качка, виляние и относ, и сравнивает с пороговыми значениями соответствующих параметров, на основании чего принимает решение о состоянии каждого вагона проходящего подвижного состава, данные о котором сохраняет. По результатам контроля вагонов подвижного состава блок 6 формирует отчет, в который вносится инвентарный номер каждого контролируемого грузового вагона, получаемый из внешней системы УС АРНВ.
Сформированный отчет блока 6 передает в блок 7 для последующей передачи данных, например, через сеть передачи данных в аппаратно-программное устройство автоматизированного рабочего места оператора диспетчерского центра для оперативного принятия решения.
ПЛК 5 формирует команду на прекращение измерений блоку 3 в случае, если данные датчика 2 счета осей совпадают с данными датчика 1 счета осей, а также, если в течении заданного промежутка времени (например, 20 с) на измерительный участок не зашло больше осей вагонов.
Таким образом, предлагаемый способ позволяет повысить достоверность измеряемых величин поперечных перемещений, углов боковых и продольных качаний кузовов вагонов, входящих в состав движущегося подвижного состава.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ВЫЯВЛЕНИЯ ВАГОНОВ С ОТРИЦАТЕЛЬНОЙ ДИНАМИКОЙ | 2015 |
|
RU2582761C1 |
| Устройство определения параметров узлов подвижного состава | 2016 |
|
RU2668774C2 |
| Способ и устройство для определения расположения центра тяжести груженого железнодорожного вагона | 2021 |
|
RU2784784C1 |
| Система определения насыпной плотности и засоренности немагнитными материалами металлического лома в полувагонах в составах железнодорожного транспорта | 2018 |
|
RU2717286C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ХОДОВЫХ ЧАСТЕЙ ВАГОНОВ | 2010 |
|
RU2450948C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| СПОСОБ СНИЖЕНИЯ ИЗНОСА СИСТЕМЫ КОЛЕСО-РЕЛЬС И КОНСТРУКЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2449910C2 |
| Способ контроля дозирования сыпучего груза, преимущественно балласта, на железнодорожный путь из специального подвижного состава с известной жесткостью рессорного подвешивания и система для его реализации | 2021 |
|
RU2769590C1 |
| Система технического и коммерческого контроля состояния поездов | 2019 |
|
RU2728202C1 |
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
Изобретение относится к методам измерения и контроля динамических характеристик вагонов. В способе на одном рельсе измерительного участка устанавливают два датчика счета осей на заданном расстоянии друг от друга и лидар, размещенный на высоте не менее 4700 мм на опоре. При прохождении подвижного состава через зону контроля с помощью датчиков счета осей регистрируют момент времени входа и выхода вагонов с измерительного участка, осуществляют подсчет осей проходящего подвижного состава и вычисляют скорость и ускорение каждого вагона, на основании полученных данных определяют тип вагонов в составе подвижного состава и порядок их следования. С помощью лидара измеряют расстояния до борта каждого вагона проходящего поезда на не менее 100 срезах профиля борта. По результатам измерений строят модель борта каждого вагона поезда и уточняют особенности каждого вагона подвижного состава, определяют усредненное значение полуширины вагона и горизонты, свободные от артефактов, из которых выбирают два горизонта, один - опорный Hог на высоте ~ 2800 мм от головки рельса, а другой - уточняющий Hуг, первый из которых используют как основной горизонт, а второй – как подтверждающий. На основании проведенных измерений координат точек на основном и подтверждающем горизонтах вычисляют результирующую амплитуду  и
и  колебаний соответственно на основном и подтверждающем горизонтах. Далее уточняют амплитуду колебаний кузовов грузовых вагонов на опорном горизонте
колебаний соответственно на основном и подтверждающем горизонтах. Далее уточняют амплитуду колебаний кузовов грузовых вагонов на опорном горизонте  , выявляют боковые составляющие колебаний вагонов, такие как качка, виляние и относ, и сравнивают с нормированными пороговыми значениями соответствующих параметров, на основании чего принимают решение о состоянии каждого вагона проходящего подвижного состава, данные о котором сохраняют. Достигается повышение достоверности измеряемых величин поперечных перемещений, углов боковых и продольных качаний кузовов вагонов, входящих в состав движущегося подвижного состава. 1 з п. ф-лы, 1 ил.
, выявляют боковые составляющие колебаний вагонов, такие как качка, виляние и относ, и сравнивают с нормированными пороговыми значениями соответствующих параметров, на основании чего принимают решение о состоянии каждого вагона проходящего подвижного состава, данные о котором сохраняют. Достигается повышение достоверности измеряемых величин поперечных перемещений, углов боковых и продольных качаний кузовов вагонов, входящих в состав движущегося подвижного состава. 1 з п. ф-лы, 1 ил.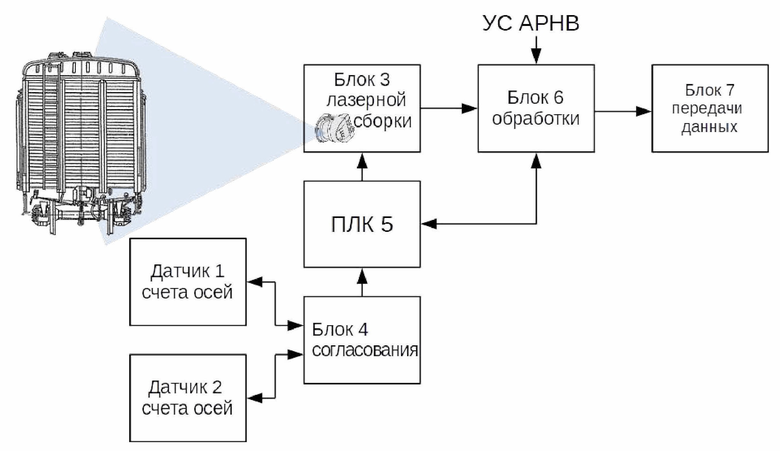
1. Способ обнаружения вагонов с отрицательной динамиков, характеризующийся тем, что способ обнаружения вагонов с отрицательной динамикой заключается в том, что на одном рельсе измерительного участка устанавливают два датчика счета осей на заданном расстоянии друг от друга и 2D лидар, размещенный на высоте не менее 4700 мм на опоре, установленной на заданном расстоянии от оси ближайшего пути, при прохождении подвижного состава через зону контроля измерительного участка с помощью датчиков счета осей регистрируют момент времени входа и выхода каждого вагона с измерительного участка, осуществляют подсчет осей проходящего подвижного состава и вычисляют скорость и ускорение каждого вагона, на основании полученных данных определяют тип вагонов в составе подвижного состава и порядок их следования, а с помощью 2D лидара измеряют расстояния до борта каждого вагона проходящего поезда на не менее 100 вертикальных срезах профиля борта, по результатам измерений строят 3D модель борта каждого вагона поезда и уточняют особенности каждого вагона подвижного состава, определяют усредненное значение полуширины вагона ДВ и горизонты, свободные от артефактов, из которых выбирают два горизонта, один - опорный Hог на высоте ~2800 мм от головки рельса, а другой - уточняющий Hуг, первый из которых используют как основной горизонт, а второй – как подтверждающий, по данным проведенных измерений координат точек на основном и подтверждающем горизонтах проводят аппроксимацию полученной зависимости колебаний кузова вагона до гармонического закона, определяют результирующие амплитуды колебаний  и
и  соответственно на основном и подтверждающем горизонтах и вычисляют результирующую амплитуду и колебаний соответственно на основном и подтверждающем горизонтах, при этом амплитуду колебаний кузова на уточняющем горизонте приводят к значениям на опорном горизонте в соответствии с выражением:
соответственно на основном и подтверждающем горизонтах и вычисляют результирующую амплитуду и колебаний соответственно на основном и подтверждающем горизонтах, при этом амплитуду колебаний кузова на уточняющем горизонте приводят к значениям на опорном горизонте в соответствии с выражением:  ,
,
где  – корректирующий коэффициент;
– корректирующий коэффициент;  – высота расположения шкворня вагона, сравнивают значение амплитуды колебаний на опорном горизонте с нормированным значением амплитуды колебаний вагона и при превышении его определяют состояние вагона с отрицательной динамикой, при этом сведения о вагоне с отрицательной динамикой подвижного состава привязывают к его инвентарному номеру и сохраняют в базе данных.
– высота расположения шкворня вагона, сравнивают значение амплитуды колебаний на опорном горизонте с нормированным значением амплитуды колебаний вагона и при превышении его определяют состояние вагона с отрицательной динамикой, при этом сведения о вагоне с отрицательной динамикой подвижного состава привязывают к его инвентарному номеру и сохраняют в базе данных.
2. Способ по п. 2, отличающийся тем, что данные о состоянии вагонов с отрицательной динамикой данных передают в диагностический центр для оперативного принятия решений.
| Чертежный прибор | 1929 |
|
SU25429A1 |
| Система расщепления проводов для электрической линии передачи высокого напряжения | 1934 |
|
SU45976A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ВЫЯВЛЕНИЯ ВАГОНОВ С ОТРИЦАТЕЛЬНОЙ ДИНАМИКОЙ | 2015 |
|
RU2582761C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА 3D КОНТРОЛЬ | 2019 |
|
RU2718769C1 |
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
| Способ задубливания овчин перед дублением | 1931 |
|
SU37244A1 |
| Автоматизированная система коммерческого осмотра поездов и вагонов с модульной архитектурой (АСКО ПВ 3.0) | 2018 |
|
RU2713132C1 |
| УСТРОЙСТВО ДЛЯ РАЗРУШЕНИЯ ЛЕДЯНОГО ПОКРОВА | 2005 |
|
RU2293039C2 |

