Область техники, к которой относится изобретение
Настоящее изобретение относится к области измерения уровня налива радаром, использующим электромагнитные волны для определения расстояния до поверхности продукта в резервуаре.
Уровень техники
Способ использования непрерывных волн с частотной модуляцией (FMCW, frequency modulated continuous wave) является наиболее распространенным принципом осуществления измерений в приложениях, требующих высокой точности, с самого момента появления коммерческих решений в области радиолокационного измерения уровня налива в 1970-х и 1980-х годах. Измерение по способу FMCW включает в себя передачу в резервуар сигнала, частота которого распределена по диапазону шириной порядка нескольких гигагерц. Например, сигнал может находиться в диапазоне 25-27 ГГц или 9,5-11 ГГц. Переданный сигнал отражается от поверхности содержимого резервуара (или от любой другой области скачка импеданса), и эхо-сигнал, задержанный на некоторое время, поступает обратно в измерительный прибор. В результате смешения эхо-сигнала с переданным сигналом возникает смешанный сигнал, частота которого равна изменению частоты переданного сигнала, произошедшему за время задержки. Поскольку изменение частоты передаваемого сигнала линейно, такое изменение частоты, также называемое промежуточной частотой (IF, intermediate frequency), пропорционально расстоянию до отражающей поверхности. Смешанный сигнал часто называют IF-сигналом.
Хотя известные системы FMCW обеспечивают высокую точность измерений, они обладают достаточно высоким энергопотреблением, что затрудняет возможности их применения в приложениях с ограничениями по энергопитанию. В число примеров таких приложений входят полевая аппаратура с питанием от двухпроводного интерфейса, такого как контуры с током 4-20 мА, и беспроводные устройства, получающие питание от внутреннего источника (например, батареи или солнечного элемента). Известны различные способы снижения энергопотребления.
В патентном документе US 12/981995 авторами настоящей заявки был описан новый и менее энергозатратный принцип измерений, предполагающий испускание серии импульсов с постоянной частотой несущей волны, причем длительность каждого импульса велика по сравнению с временем его распространения (например, длительность импульса составляет от 10 мкс до 100 мс, а время его распространения составляет порядка десятых микросекунды). Данный способ известен под названием способа использования многочастотной импульсной волны (Multiple Frequency Pulsed Wave, MFPW).
Количества разных частот несущих волн в цикле измерений недостаточно для формирования непрерывного IF-сигнала или даже аппроксимации IF-частоты аналогично так называемым «пошаговым» или «дискретным» системам FMCW. Вместо этого по определенной частотной схеме выбирают малый набор частот, и для каждой из частот определяют фазовый сдвиг в принимаемом импульсе.
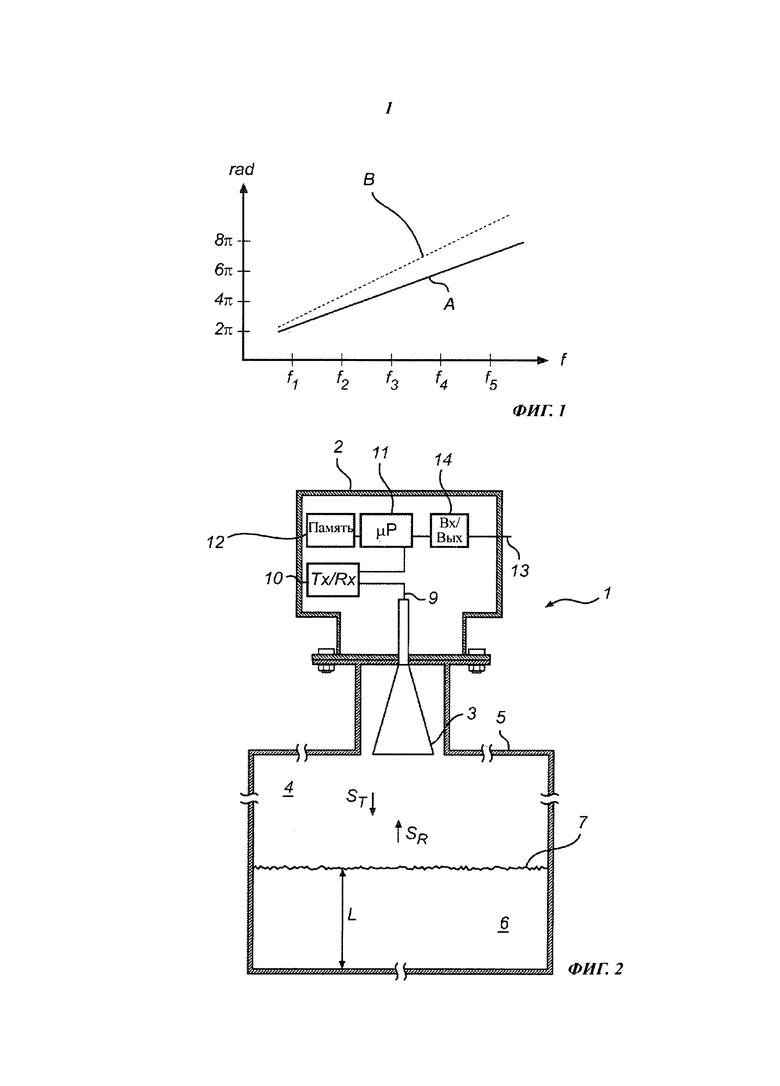
Процесс определения расстояния до поверхности включает в себя определение изменения фазы в зависимости от частоты испускания (см. фиг. 1). Линия А соответствует исходной оценке расстояния, а линия В - скорректированной оценке. Теоретически, для определения скорости изменения (наклона линии В) достаточно всего двух значений (точек х), однако на практике может быть необходимо большее число замеров, например, от 5 до 20. В более сложных условиях распространения эхо-сигнала или на начальном этапе может потребоваться до нескольких сотен точек. Разумеется, с точки зрения энергосбережения желательно обеспечить достижение высокой точности и надежности при минимальном числе замеров.
Одна из возможностей повышения точности без необходимости наличия многочисленных замеров состоит в определении «грубой оценки» расстояния до поверхности и использовании такой оценки в качестве отправной точки для точного определения расстояния.
Раскрытие изобретения
В связи с вышеизложенным задача, на решение которой направлено настоящее изобретение, состоит в предложении усовершенствованной радиолокационной системы для определения уровня налива на основе использования импульсов постоянной частоты и большой по сравнению с временем распространения длительностью, выполненной с возможностью предоставления грубой оценки расстояния независимо от существующих измерений.
В соответствии с первым аспектом изобретения для решения этой и других поставленных задач предлагается способ определения расстояния до поверхности продукта, содержащегося в резервуаре, включающий шаги, на которых: формируют передаваемый сигнал в виде последовательности импульсов, состоящей из импульсов с отдельной несущей волной, имеющих длительность более 1 микросекунды и менее 100 миллисекунд, причем к каждому импульсу применяют частотную модуляцию с заданной центральной частотой, передают передаваемый сигнал в направлении поверхности, принимают электромагнитный возвратный сигнал, отраженный от поверхности, смешивают возвратный сигнал с передаваемым сигналом в первом канале (канал I) и смешивают возвратный сигнал с передаваемым сигналом, сдвинутым по фазе на 90°, во втором канале (канал Q) для получения двух сигналов промежуточной частоты (IF-сигналов), фильтруют IF-сигналы для получения отфильтрованного сигнала, соответствующего первой выбранной гармонике частоты модуляции, смешивают отфильтрованные сигналы каждого канала с первой выбранной гармоникой указанной частоты модуляции для получения двух первичных значений амплитуды (I и Q), на основе первичных значений амплитуды вычисляют (шаг S5) реальные характеристики фазы каждого отдельного принятого импульса относительно каждого соответствующего отдельного переданного импульса и определяют измерение расстояния на основе реальных характеристик фазы, фильтруют IF-сигналы для получения отфильтрованного сигнала, соответствующего второй выбранной гармонике указанной частоты модуляции, смешивают отфильтрованные сигналы каждого канала со второй выбранной гармоникой частоты модуляции для получения двух вторичных значений амплитуды (I и Q), и получают оценку расстояния на основе соотношения между первичными и вторичными значениями амплитуды.
В соответствии со вторым аспектом изобретения для решения этой и других поставленных задач предлагается радилокационная система определения уровня налива для определения расстояния до поверхности продукта, содержащегося в резервуаре, содержащая приемопередатчик для передачи электромагнитных передаваемых сигналов образованных последовательностью импульсов, состоящей из импульсов с отдельной несущей волной, имеющих длительность более 1 микросекунды и менее 100 миллисекунд, причем к каждому импульсу применяют частотную модуляцию с заданной центральной частотой, и приема электромагнитных возвратных сигналов, отраженных от поверхности, набор радиочастотных смесителей для смешивания возвратного сигнала с передаваемым сигналом в первом канале (канал I) и смешивания возвратного сигнала с передаваемым сигналом, сдвинутым по фазе на 90°, во втором канале (канал Q) для получения двух сигналов промежуточной частоты (IF-сигналов), первый набор фильтров для фильтрации IF-сигналов для получения отфильтрованного сигнала, соответствующего первой выбранной гармонике частоты модуляции, первый набор IF-смесителей для смешивания отфильтрованных сигналов каждого канала с первой выбранной гармоникой частоты модуляции для получения двух первичных значений амплитуды (I и Q), второй набор фильтров для фильтрации IF-сигналов для получения отфильтрованного сигнала, соответствующего второй выбранной гармонике частоты модуляции, второй набор IF-смесителей для смешивания отфильтрованных сигналов каждого канала со второй выбранной гармоникой частоты модуляции для получения двух вторичных значений амплитуды (I и Q), и схему обработки, подключенную с возможностью приема сигналов с выхода IF-смесителей и выполненную с возможностью вычисления реальных характеристик фазы каждого отдельного принятого импульса относительно соответствующего отдельного переданного импульса на основе первичных значений амплитуды и определения измерения расстояния на основе реальных характеристик фазы, и получения оценки расстояния на основе соотношения между первичными и вторичными значениями амплитуды.
Таким образом, измерение уровня налива включает оценку расстояния до поверхности. Такую оценку определяют по соотношению амплитуды первой гармоники IF-сигнала и амплитуды второй гармоники IF-сигнала.
Частотная модуляция передаваемого сигнала вносит зависимость от расстояния. Две разные гармоники модулированного сигнала используются в двух отдельных контурах прохождения сигнала (последовательно или параллельно) для получения двух разных значений, соответствующих разным зависимостям от расстояния. Сравнение этих двух значений, например, путем деления одного на другое и получения их частного, позволяет получить грубую оценку расстояния до поверхности.
По существу, каждая гармоника соответствует определенному диапазону расстояний. Расстояние может быть оценено путем определения мощности приема на двух или более гармониках и осуществления их корреляции друг с другом. Зависимости от расстояния могут значительно различаться в зависимости от модуляции и других параметров и могут быть подобраны в соответствии с конкретным приложением.
Реальная фаза IF-сигнала нескольких импульсов может быть использована в процессе более точного измерения расстояния, например, в соответствии с решением, описанным в патентной заявке США №12/981995, включенной в настоящую заявку посредством ссылки.
В соответствии с одним из возможных подходов оценка расстояния может быть использована в качестве входных данных для точного определения расстояния, например, для улучшения статистического анализа, применяемого к нескольким характеристикам фазы, тем самым обеспечивая повышение чувствительности и достоверности измерений расстояния. В альтернативном варианте грубая оценка может быть использована для проверки точного измерения после обработки данных. При обнаружении значительных расхождений между грубой оценкой и точным измерением расстояния точные измерения расстояния следует провести заново.
Краткое описание чертежей
Ниже следует более подробное описание настоящего изобретения, приведенное со ссылками на прилагаемые чертежи, иллюстрирующие предпочтительные в настоящее время варианты осуществления изобретения. На чертежах:
На фиг. 1 представлен график зависимости фазы от частоты передачи.
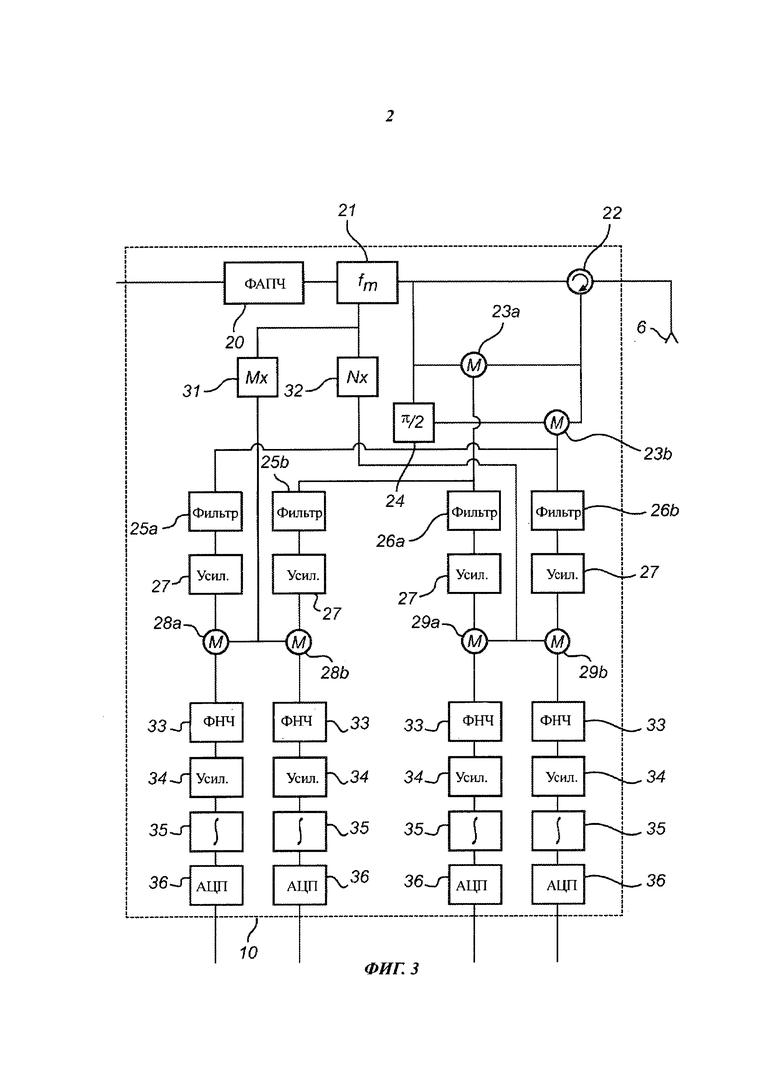
На фиг. 2 представлена модульная схема радиолокационного измерительного прибора для уровня налива, установленного на резервуаре.
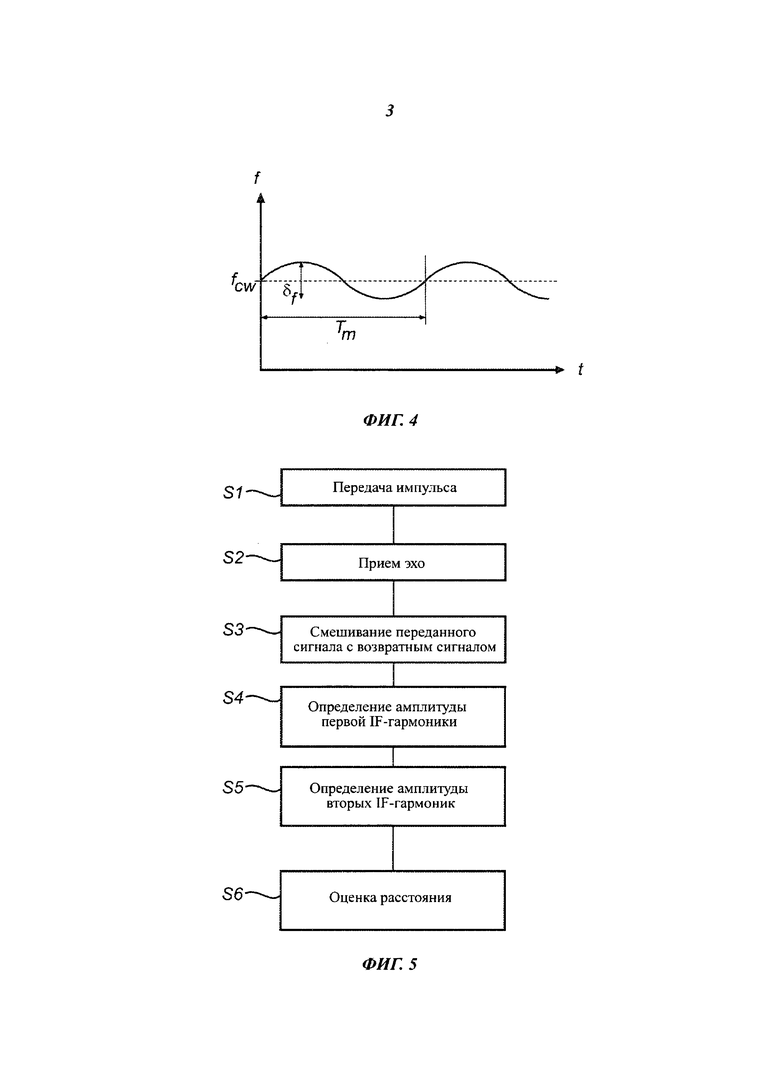
На фиг. 3 представлена более подробная модульная схема прибора по фиг. 2 по первому варианту осуществления настоящего изобретения.
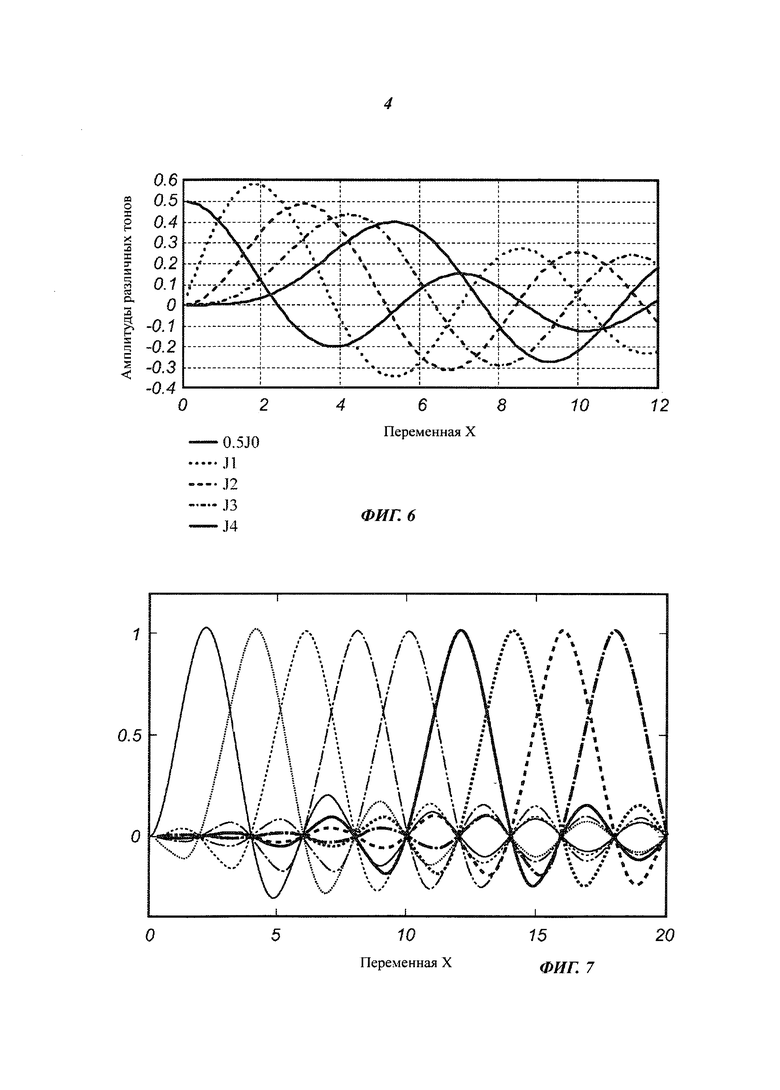
Фиг. 4 иллюстрирует частотную модуляцию несущей волны.
На фиг. 5 представлена схема способа по одному из вариантов осуществления настоящего изобретения.
На фиг. 6 представлены первые пять гармоник для синусоидальной модуляции.
На фиг. 7 представлены коэффициенты Фурье для четных тонов треугольной модуляции.
Осуществление изобретения
В рамках настоящего описания варианты осуществления настоящего изобретения в основном описаны в приложении к радиолокационной системе определения уровня налива с антенной для испускания и приема свободно распространяющихся электромагнитных сигналов. Следует отметить, что это никоим образом не ограничивает объем охраны изобретения, которое также применимо к другим системам распространения сигналов, включая другие антенны со свободным распространением сигналов, такие как стержневые антенны, микрополосковые антенны, неподвижные или подвижные параболические антенны или конические антенны, и волноводы, такие как успокоительные трубки, фидеры или зонды, такие как одноканальные зонды (в том числе так называемые линии Губо), двухканальные зонды или коаксиальные зонды.
Фиг. 2 схематически иллюстрирует радиолокационную систему 1 для определения уровня налива по одному из вариантов осуществления настоящего изобретения, содержащую модуль 2 измерительной электроники и средства передачи сигнала, в данном случае представляющие собой рупорную антенну 3. Радиолокационная система 1 для определения уровня налива установлена на резервуаре 5, частично заполненном продуктом 6, уровень налива которого необходимо определить. В случае, проиллюстрированном на фиг. 2, продукт 6 представляет собой твердое вещество, такое как зерно или пластмассовые гранулы, определение уровня налива которого, как хорошо известно, затруднено и требует от радиолокационной системы для определения уровня налива высокой чувствительности измерений. По результатам анализа переданных сигналов ST, испускаемых антенной 3 в направлении поверхности 7 продукта 6, и эхо-сигналов SR, возвращающихся от поверхности 7, модуль 2 измерительной электроники может определить расстояние между точкой отсчета и поверхностью 7 продукта 6, из которого может быть выведена величина уровня L налива (заполнения). Следует отметить, что хотя в настоящем описании речь идет о резервуаре 5, содержащем один продукт 6, аналогичным образом может быть измерено расстояние до любой границы между материалами, заключенной в резервуаре 5.
Как схематически показано на фиг. 2, модуль 2 электроники содержит приемопередатчик 10 для передачи и приема электромагнитных сигналов, соединенный с антенной 3 посредством волновода 9. Модуль 2 дополнительно содержит схему 11 обработки, соединенную с приемопередатчиком 10 для управления приемопередатчиком и обработки сигналов, принимаемых приемопередатчиком, с целью определения уровня налива продукта 6 в резервуаре 5. Схема 11 обработки также соединена с памятью 12, которая хранит любое программное обеспечение, необходимое для работы измерительного прибора 1, а также обеспечивает оперативную память (RAM), используемую в его работе.
Схема 11 обработки дополнительно может быть соединена с линиями 13 внешней связи для осуществления аналоговой и/или цифровой связи через интерфейс 14. Например, связь между интерфейсом 14 связи и внешней станцией управления (не представлена) может быть обеспечена посредством двухпроводного интерфейса, выполняющего двойную функцию передачи результатов измерений на станцию управления и приема электроэнергии для работы измерительного прибора 1. Сила тока в линиях регулируется в соответствии с результатом измерения, определенным схемой 11 обработки.
В альтернативном варианте измерительный прибор может осуществлять беспроводную связь со станцией управления, например, с использованием протокола HART беспроводной связи (Wireless HART) и получать питание от батарей или другого локального источника питания, обеспечивающего энергоснабжение для работы в автономном режиме.
Хотя на фиг. 2 приемопередатчик 10, схема 11 обработки и интерфейс 14 представлены как отдельные модули, все или некоторые из этих элементов могут быть выполнены на одной и той же печатной плате.
На фиг. 3 схематически представлен пример приемопередатчика 10, выполненного в соответствии с одним из вариантов осуществления настоящего изобретения.
Генератор 20 сигналов выполнен с возможностью генерирования импульсов несущей волны с точно заданной и контролируемой частотой несущей. Отклонение при обеспечении точности частоты должно составлять менее 1/1000, а предпочтительно менее 1/10000 или еще лучше. Для этого может быть использована система управления с обратной связью, а генератор сигналов может содержать, например, схему фазовой автоподстройки частоты, ФАПЧ.
В проиллюстрированном и описываемом примере предполагается, что длительность импульса составляет приблизительно 2 мс, однако могут быть использованы и значительно более короткие импульсы, например, длительностью порядка нескольких микросекунд. Следует отметить, что в контексте измерения уровня налива в резервуарах длительность упомянутых импульсов, составляющая нескольких микросекунд или миллисекунд, слишком велика для импульсных измерений расстояния способами динамической рефлектометрии, т.е. для приема отраженного импульса и определения времени его распространения. Поэтому импульсы, используемые в соответствии с настоящим изобретением, имеют большую длительность, чем импульсы, применяемые в известных радиолокационных измерительных приборах для определения уровня, в которых характерное значение длительности импульса имеет порядок наносекунд.
Средняя мощность импульсов может составлять порядка нескольких нановатт или микроватт. Однако коэффициент заполнения, т.е. отношение длительности импульсов и интервалов между ними, должно быть ограничено величиной меньшей, чем 50%, а предпочтительно значительно меньшей, например, 5%, 1% или менее. По сравнению с известной методикой FMCW это означает возможность испускания импульсов сравнительно высокой мощности без увеличения средней мощности на цикл измерений.
Импульсы, как правило, представляют собой радиолокационные импульсы с частотой несущей волны в гигагерцовом диапазоне. Ширина частотного диапазона может быть равна порядка 10% рабочей частоты, диапазон может составлять, например, от 25 до 27 ГГц или от 9,5 до 11 ГГц. Количество N частот предпочтительно может быть определено в соответствии с условиями, господствующими в резервуаре. Процессор 11 (см. фиг. 2) управляет длительностью импульсов, коэффициентом заполнения и частотой ФАПЧ.
Система 20 ФАПЧ соединена с модулятором 21, выполненным с возможностью осуществления частотной модуляции импульсов, поступающих от системы 20 ФАПЧ. Модуляция может быть разных типов, в том числе периодическая (например, синусоидальная или треугольная) или случайная (шумоподобная). В случае периодической модуляции каждый испущенный импульс предпочтительно содержит целое число периодов модуляции, а момент начала модуляции предпочтительно имеет фиксированное положение (например, в нулевой точке каждого импульса). В качестве случайной модуляции предпочтительно используют псевдослучайную модуляцию.
В представленном примере предполагается использование периодической модуляции с частотой fm модуляции. Изменения частоты модулированной несущей волны представлены на фиг. 6. Частота модуляции должна быть подобрана в соответствии с длительностью импульса так, чтобы каждый импульс содержал целое число периодов модуляции (Pmod). В настоящем примере, в котором длительность импульса имеет порядок миллисекунд, частота модуляции должна быть порядка килогерц и может быть равна, например, 10 кГц. При длительности импульса от 10 мкс до 100 мс частота модуляции может составлять от нескольких килогерц до одного мегагерца.
Как показано на фиг. 4, амплитуда модуляции подобрана так, чтобы внести вариацию частоты несущей волны (ширину модуляции) 5f значительно меньшую ширины заранее определенного частотного диапазона измерений. Как уже было отмечено, заранее определенный диапазон частот несущей волны, используемый в частотной схеме, может иметь ширину порядка 1 ГГц, в то время как ширина модуляции δf может иметь порядок мегагерц.
Для направления сигнала от модулятора 21 сигнала на антенну 3, установленную в резервуаре 5, и направления возвратного сигнала от антенны 3 в приемный модуль приемопередатчика 10 предусмотрен циркулятор 22 или делитель мощности, например, делитель мощности Вилкинсона (Wilkinson Power Divider, WPD).
Приемный модуль содержит один или несколько радиочастотных (РЧ) смесителей для смешивания возвратного сигнала с передаваемым сигналом. РЧ-смешивание может быть гомодинным, при котором возвратный сигнал смешивают непосредственно с передаваемым сигналом, однако также может быть оправдано смешивание с задержанным передаваемым сигналом.
В представленном примере приемный модуль содержит два канала, синфазный канал (I) и квадратурный канал (Q), каждый из которых содержит смеситель 23а, 23b. Первый смеситель 23а получает переданные импульсы непосредственно от системы 20 ФАПЧ (канал I). Второй смеситель 23b получает переданные сигналы от системы 20 ФАПЧ через 90-градусный фазовращатель 24 (канал Q), предусмотренный между модулятором 21 и смесителем 23b.
На выходе смесителей 23а, 23b получают не постоянные сигналы, а сигналы промежуточной частоты (IF-сигналы), включающие частоту fm модуляции и ее гармоники. Приемник дополнительно содержит два набора полосовых фильтров 25а, 25b и 26а, 26b, соответственно, причем каждый такой набор фильтров настроен для фильтрации требуемого частотного спектра. Выход каждого из РЧ-смесителей 23а, 23b соединен с одним из фильтров каждого из наборов так, что в обоих каналах (I и Q) происходит фильтрация двух частотных спектров, первичного и вторичного. Как будет описано ниже, требуемый спектр может представлять собой одну из первых гармоник частоты fm. Отфильтрованные сигналы усиливают посредством усилителей 27.
Далее каждый из наборов фильтров соединен с набором IF-смесителей 28а, 28b и 29а, 29b, соответственно. Данные смесители также получают в качестве входа частоту fm модуляции от модулятора 21 через два умножителя 31 и 32. Умножитель 31 выполнен с возможностью умножения частоты fm модуляции на М, что соответствует гармонике, отфильтровываемой фильтрами 25а, 25b, а умножитель 32 выполнен с возможностью умножения частоты fm модуляции на N, что соответствует гармонике, отфильтровываемой фильтрами 26а, 26b. Например, в случае выбора первой и второй гармоник М=2, а N=3.
В соответствии с одним из вариантов осуществления изобретения фильтры 25а, 25b, 26а, 26b и умножители 31, 32 могут быть переменными, что обеспечивает возможность выбора требуемого частотного спектра. Однако в некоторых случаях фильтры 25а, 25b, 26а, 26b определяются аппаратным обеспечением и не могут быть переменными. В таком случае для получения требуемой фильтрации варьируют частоту fm модуляции, ширину δf модуляции и коэффициент N. На практике фильтры в большинстве случаев могут быть осуществлены в виде цифровых элементов и могут быть скомбинированы со смесителями.
На выходе смесителей 25а, 25b, 26а, 26b получают постоянные сигналы, отражающие значения первичной и вторичной фазы для каждого канала. Каждое из таких значений поступает в цепочку обрабатывающих элементов, которая содержит фильтр 33 нижних частот, усилитель 34, интегратор 35 и аналогово-цифровой преобразователь (АЦП) 36.
Фильтры 33 и усилители 34 повышают отношение сигнала к шуму радиолокационной системы определения уровня налива. Ширина полосы пропускания фильтра 33 нижних частот предпочтительно соответствует обратной ширине импульса. Другими словами, если длительность импульса равна 2 мс, ширина подходящего фильтра должна быть равна 500 Гц. Таким образом, применение более длительных импульсов может быть использовано для повышения чувствительности (уменьшения ширины полосы) за счет увеличения средней мощности. Однако, если для снижения среднего энергопотребления желательно получить низкий коэффициент заполнения, импульсы должны быть достаточно короткими и, следовательно, полоса пропускания фильтра 33 нижних частот по необходимости должна быть более широкой (что соответствует меньшей чувствительности), чем у известных систем FMCW. Интеграторы 35 выполнены с возможностью интегрирования сигналов по всей длине импульса.
Порядок расположения данных элементов (в частности, расположение аналогово-цифрового преобразователя) зависит от выбора компонентов, то есть от выбора аналоговых или цифровых компонентов. Цифровой выходной сигнал поступает в процессор 11 для сохранения и обработки, описанной ниже.
Также следует отметить, что представленная на фиг. 3 конфигурация приемопередатчика с двумя параллельными каналами приема (I и Q), каждый из которых разделен на два параллельных контура прохождения сигнала (с фильтрами N и М), не накладывает каких-либо ограничений на концепцию изобретения.
Например, в столь же полезном альтернативном варианте первичное и вторичное значения фазы могут быть предоставлены последовательно, т.е. при наличии в каждом канале лишь одного контура фильтрации и с попеременным изменением настроек такого контура. В приложении к схеме по фиг. 3 это означает наличие лишь двух наборов из фильтров 25, 26, усилителей 26, 27, смесителей 28, 29 и обрабатывающих элементов 33-36 вместо четырех.
Более того, последовательная конфигурация также может быть использована для РЧ-смешения смесителями 23а, 23b, что позволяет еще более сократить число компонентов ценой увеличения числа импульсов в одном измерении.
В зависимости от типа частотной модуляции, осуществляемой модулятором 21 (синусоидального, треугольного, случайного и т.д.), IF-сигналы, поступающие с выхода смесителей 23а, 23b, будут иметь зависимость от расстояния и распределены по разным гармоникам.
Если переданный сигнал имеет синусоидальную модуляцию с шириной 5f модуляции, то принятый сигнал после гомодинного смешения может быть описан функциями Бесселя как набор гармоник fm, как показано на фиг. 6.
Аргумент функций Бесселя есть X=2πhδf/c, где h - расстояние до отражающей поверхности, а с - скорость света в вакууме. При увеличении расстояния h (и, следовательно, увеличении X) принятый сигнал будет распределен по большему числу гармоник. Например, если ширина δf модуляции равна 15 МГц, а расстояние h равно 10 м, аргумент X приблизительно равен 2.0, и большая часть принятого сигнала имеет частоту fm. Зависимость J1(Х) от расстояния (для X меньше 2) обладает тем же эффектом, что и фильтрация верхних частот в известных системах FMCW, т.е. уменьшает динамический диапазон приблизительно на 20 дБ благодаря тому, что зависимость амплитуды от расстояния компенсирует зависимость вида 1/h. При использовании постоянного значения δf оно будет ограничено величиной 8-10 МГц для измерения расстояний порядка 20-25 м без чрезмерно значительных потерь амплитуды в результате распределения мощности по слишком большому числу других гармоник.
Также существует возможность выбора второго тона, 2fm, что обеспечивает более эффективное подавление близких эхо-сигналов и позволяет использовать ширину модуляции, равную 12-15 МГц, в приложениях на расстоянии 20-25 м. Ширина модуляции может быть отрегулирована в соответствии с используемым интервалом расстояний. В зависимости от типа модуляции она может быть разной для разных установок или быть отрегулирована в процессе измерений.
Альтернативой синусоидальной модуляции является треугольная частотная модуляция, которая обладает другими характеристиками и может быть более эффективна, чем синусоидальная модуляция.
Получаемые коэффициенты Фурье для четных гармоник (2fm, 4fm, и т.д.) при треугольной модуляции представлены на фиг. 7. Коэффициенты для гармоник 1, 3 и т.д. сходны с коэффициентами для гармоник 2, 4 и т.д., но их пики расположены между пиками четных гармоник. Все пики близки к 1, так что в случае фильтрации ближайшей гармоники используется, по существу, всю мощность сигнала. Аргумент X тот же, что и выше, так что в случае треугольной модуляции может быть использована большая ширина δf. При ширине модуляции, равной 50 МГц, вся ось верхнего графика (0<Х<20) соответствует диапазону расстояний от 0 до 30 м. При ширине модуляции, равной 50 МГц, спетральная плотность может быть уменьшена на 17 дБ без ослабления принимаемого сигнала. Такое уменьшение также действует для более длинных импульсов. Уменьшение спектральной плотности при одинаковой мощности может быть использовано для увеличения мощности.
Путем определения амплитуды двух разных гармоник в двух отдельных процессах и сравнения их между собой можно получить грубую оценку расстояния. Например, из фиг. 6 ясно видно, что при равенстве амплитуд двух первых гармоник (т.е. когда их отношение равно 1) значение X незначительно больше 2. По известному значению X, используя приведенное выше соотношение, можно вычислить расстояние h.
Работа радиолокационного измерительного прибора для определения уровня налива, проиллюстрированного на фиг. 2 и 3, в частности, используемая процедура, в частности, процедура получения оценки расстояния, описана далее со ссылками на фиг. 5.
Сначала на шаге S1 система 20 ФАПЧ генерирует импульс определенной длительности, например, 20 мс, а антенна 3 передает его в виде сигналов ST в резервуар.
На шаге S2 происходит отражение переданных электромагнитных сигналов ST от скачков импеданса, имеющихся в резервуаре 5, в том числе от поверхности 7 продукта 6, заключенного в резервуаре 5, и их возврат в приемопередатчик 10 через антенну 3 в виде эхо-сигналов SR. Возвратный сигнал SR принимается двумя каналами (I и Q) приемного модуля приемопередатчика 10.
На шаге S3 возвратный сигнал SR смешивают с передаваемым сигналом в смесителях 23а и/или 23b, получая при этом IF-сигналы.
Затем, на шагах S4-S5, определяют амплитуды двух разных гармоник IF-сигнала (в проиллюстрированном примере им соответствуют обработанные выходные сигналы смесителей 28а и 29а или смесителей 28b и 29b). Наконец, на шаге S6 производят сравнение таких двух амплитуд для получения грубой оценки расстояния.
Как было указано выше, одно из полезных соотношений представляет собой просто частное двух амплитуд. Такое частное может соответствовать определенному расстоянию при известной зависимости обеих гармоник от расстояния.
Также следует отметить, что в оптимальном варианте может быть предусмотрено определение в каждом канале амплитуд двух или более разных гармоник. Например, в одном канале могут быть определены амплитуды первой и третьей гармоник, а во втором канале могут быть определены амплитуды второй и четвертой гармоник. В таком случае может быть получена еще более устойчивая оценка.
Описанный в настоящем документе способ оценки расстояния в оптимальном варианте может быть осуществлен в радиолокационном измерительном приборе для определения уровня налива, выполненном с возможностью работы в соответствии с принципами, описанными в патентной публикации US 12/981995.
В соответствии с этим принципом вышеописанные значения первичной (или вторичной) фазы для всех частот, входящих в заранее определенную частотную схему, сохраняют в памяти 13. Для каждого значения разности фаз (в диапазоне от 0 до 2 π) осуществляется корреляция с ожидаемым значением разности фаз, вычисленным по ранее определенному расстоянию. Расхождение между ожидаемой и реально измеренной фазой соответствует смещению расстояния. В принципе, одно значение такого смещения, полученное для одной частоты, достаточно для получения скорректированного измерения расстояния. Однако неопределенность такого измерения обычно слишком велика и не позволяет получить достаточной достоверности результатов, вследствие чего, как правило, необходимо проведение какого-либо статистического анализа.
Грубая оценка, получаемая в соответствии с настоящим изобретением для каждого переданного импульса, может быть весьма полезна для повышения устойчивости и достоверности такого анализа. При определенных условиях наличие такой оценки может устранить потребность в изначальном измерении расстояния, как описано в патентной публикации US 12/981995.
В альтернативном или дополнительном варианте вышеописанная оценка может быть использована для проверки результатов определения расстояния более точным способом, например, в соответствии с патентной публикацией US 12/981995.
Для специалиста в данной области очевидно, что настоящее изобретение ни в коей мере не ограничено предпочтительными вариантами его осуществления, описанными в настоящем документе. Напротив, в него могут быть внесены многочисленные изменения и модификации, не выходящие за пределы объема и сущности прилагаемой формулы изобретения. Так, принципы изобретения не требуют обработки с использованием двух каналов I и Q, но применимы также и к одноканальной системе. Кроме того, существует несколько вариантов модификации элементов схемы приемопередатчика, не выходящих за рамки концепции изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДАРНОЕ ИЗМЕРЕНИЕ УРОВНЯ С ОПРЕДЕЛЕНИЕМ ПЕРЕМЕЩЕНИЯ ПОВЕРХНОСТИ | 2011 |
|
RU2582894C2 |
| РАДАРНЫЙ УРОВНЕМЕР НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ, ИМЕЮЩИЙ ФУНКЦИЮ САМОДИАГНОСТИКИ | 2015 |
|
RU2678933C2 |
| ЧАСТОТНО-МОДУЛИРОВАННОЕ РАДАРНОЕ ИЗМЕРЕНИЕ УРОВНЯ | 2014 |
|
RU2678211C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ УРОВНЯ С РАЗДЕЛЕНИЕМ СИГНАЛА | 2014 |
|
RU2652261C2 |
| ВОЛНОВОДНЫЙ РАДАРНЫЙ УРОВНЕМЕР НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2015 |
|
RU2688892C2 |
| СПОСОБ РАДИОЛОКАЦИИ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ НЕПРЕРЫВНОГО ЗОНДИРУЮЩЕГО СИГНАЛА | 2002 |
|
RU2241241C2 |
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 2012 |
|
RU2518373C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| СИСТЕМА РАДАРНОГО УРОВНЕМЕРА МАЛОЙ МОЩНОСТИ | 2015 |
|
RU2667351C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ИЗМЕРЕНИЯ УРОВНЯ С ФУНКЦИЕЙ МОНИТОРИНГА ЭКСПЛУАТАЦИИ | 2011 |
|
RU2602417C2 |
Изобретение относися к радиолокации и может использоваться для определения уровня налива. Технический результат состоит в повышении точности определения уровня налива. Для этого способ включает оценку расстояния до поверхности продукта, содержащегося в резервуаре. Оценку получают из соотношения амплитуды первой гармоники IF-сигнала и амплитуды второй гармоники IF-сигнала. По существу, каждая гармоника представляет определенный диапазон расстояний. Расстояние может быть оценено путем определения полученной мощности в двух или более гармониках и их коррелирования. Зависимости от расстояния могут значительно различаться в зависимости от модуляции и других параметров и могут быть подобраны в соответствии с конкретным приложением. 2 н. и 24 з.п. ф-лы, 7 ил.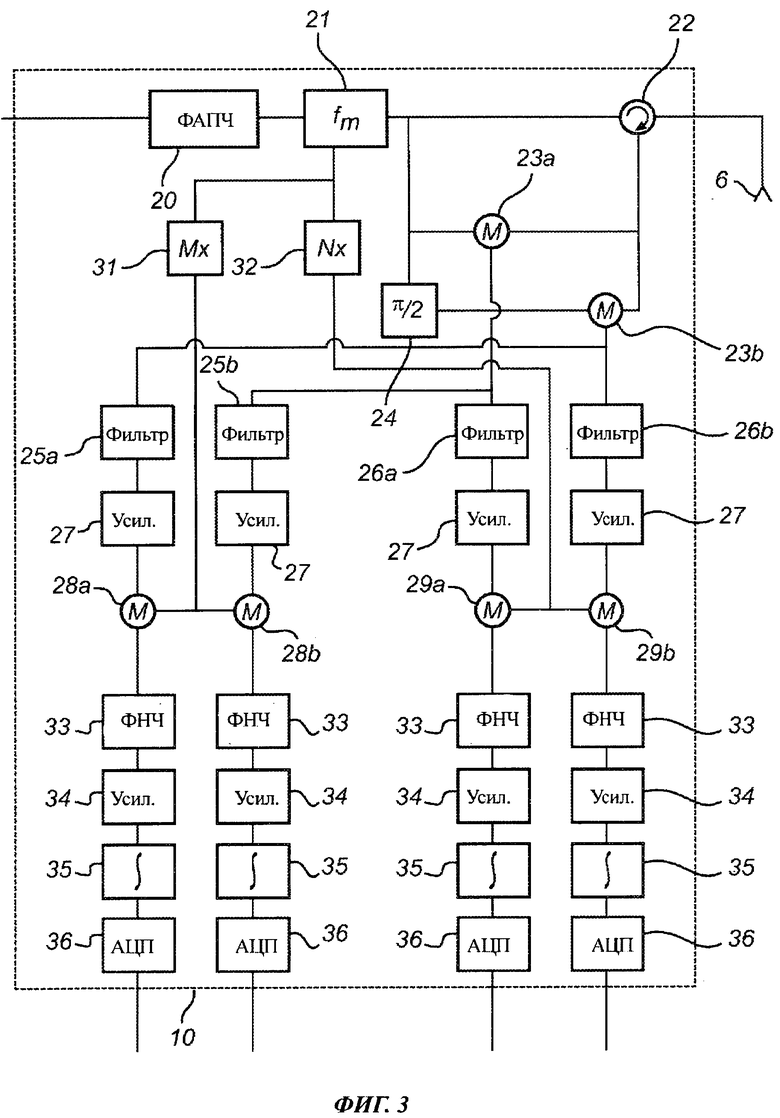
1. Способ определения расстояния до поверхности продукта, содержащегося в резервуаре, включающий шаги, на которых:
формируют передаваемый сигнал в виде последовательности импульсов, состоящей из импульсов с отдельной несущей волной, имеющих длительность более 1 микросекунды и менее 100 миллисекунд, причем к каждому импульсу применяют частотную модуляцию с заданной центральной частотой,
передают (шаг S1) указанный передаваемый сигнал в направлении указанной поверхности,
принимают (шаг S2) электромагнитный возвратный сигнал, отраженный от указанной поверхности,
смешивают (шаг S3) возвратный сигнал с передаваемым сигналом в первом канале (канал I) и смешивают возвратный сигнал с передаваемым сигналом, сдвинутым по фазе на 90°, во втором канале (канал Q) для получения двух сигналов промежуточной частоты (IF-сигналов),
фильтруют указанные IF-сигналы для получения отфильтрованного сигнала, соответствующего первой выбранной гармонике указанной частоты модуляции,
смешивают отфильтрованные сигналы каждого канала с указанной первой выбранной гармоникой указанной частоты модуляции для получения двух первичных значений амплитуды (I и Q) (шаг S4),
на основе указанных первичных значений амплитуды вычисляют реальные характеристики фазы каждого отдельного принятого импульса относительно каждого соответствующего отдельного переданного импульса и определяют измерение расстояния на основе указанных реальных характеристик фазы,
фильтруют указанные IF-сигналы для получения отфильтрованного сигнала, соответствующего второй выбранной гармонике указанной частоты модуляции,
смешивают отфильтрованные сигналы каждого канала с указанной второй выбранной гармоникой указанной частоты модуляции для получения двух вторичных значений амплитуды (I и Q) (шаг S5) и
получают (шаг S6) оценку указанного расстояния на основе соотношения между указанными первичными и вторичными значениями амплитуды.
2. Способ по п. 1, отличающийся тем, что указанное соотношение представляет собой частное указанных первых и вторых значений амплитуды.
3. Способ по п. 1, отличающийся тем, что указанную оценку используют в качестве входных данных процесса получения более точного измерения расстояния.
4. Способ по п. 1, отличающийся тем, что указанную оценку используют для проверки более точного измерения расстояния.
5. Способ по п. 1, отличающийся тем, что дополнительно включает осуществление частотной модуляции каждого импульса несущей волны с использованием случайной модуляции.
6. Способ по п. 1, отличающийся тем, что дополнительно включает осуществление частотной модуляции каждого импульса несущей волны с использованием периодической модуляции с некоторой частотой модуляции.
7. Способ по п. 6, отличающийся тем, что частотная модуляция представляет из себя синусоидальную или треугольную модуляцию.
8. Способ по п. 6, отличающийся тем, что частота модуляции лежит в диапазоне от 10 до 100 кГц.
9. Способ по п. 6, отличающийся тем, что за счет модуляции частота несущей варьируется в диапазоне от 1 до 100 МГц.
10. Способ по п. 1, отличающийся тем, что дополнительно включает точное определение указанного расстояния путем выполнения шагов, на которых:
на основе изначальной оценки расстояния определяют ожидаемые характеристики фазы каждого отдельного принятого импульса относительно каждого соответствующего отдельного переданного импульса, и
осуществляют корреляцию указанных реальных характеристик фазы с указанными ожидаемыми характеристиками фазы для получения скорректированной оценки указанного расстояния.
11. Способ по п. 10, отличающийся тем, что указанное осуществление корреляции включает шаги, на которых:
определяют смещение расстояния для указанного расстояния на основе указанных реальных характеристик фазы и указанных ожидаемых характеристик фазы, и
определяют указанную скорректированную оценку указанного расстояния на основании указанной изначальной оценки расстояния и указанного смещения расстояния.
12. Способ по п. 1, отличающийся тем, что центральную частоту каждого импульса выбирают в соответствии с частотной схемой в пределах заранее определенного частотного диапазона.
13. Способ по п. 1, отличающийся тем, что управляют частотой каждой несущей волны посредством схемы управления с обратной связью, обеспечивающей отклонение при обеспечении точности частоты менее 1/1000.
14. Способ по п. 12, отличающийся тем, что указанный заранее определенный частотный диапазон превышает 5% средней центральной частоты.
15. Способ по п. 12, отличающийся тем, что указанный заранее определенный частотный диапазон превышает 10% средней центральной частоты.
16. Способ по п. 1, отличающийся тем, что указанная последовательность импульсов имеет средний коэффициент заполнения менее 50%.
17. Способ по п. 16, отличающийся тем, что указанный коэффициент заполнения составляет менее 5%.
18. Радиолокационная система определения уровня налива для определения расстояния до поверхности продукта, содержащегося в резервуаре, содержащая:
приемопередатчик (10) для передачи электромагнитных передаваемых сигналов, образованных последовательностью импульсов, состоящей из импульсов с отдельной несущей волной, имеющих длительность более 1 микросекунды и менее 100 миллисекунд, причем к каждому импульсу применяют частотную модуляцию с заданной центральной частотой, и приема электромагнитных возвратных сигналов, отраженных от указанной поверхности,
набор радиочастотных смесителей (23а, 23b) для смешивания возвратного сигнала с передаваемым сигналом в первом канале (канал I) и смешивания возвратного сигнала с передаваемым сигналом, сдвинутым по фазе на 90°, во втором канале (канал Q) для получения двух сигналов промежуточной частоты (IF-сигналов),
первый набор фильтров (25а, 25b) для фильтрации указанных IF-сигналов для получения отфильтрованного сигнала, соответствующего первой выбранной гармонике указанной частоты модуляции,
первый набор IF-смесителей (28а, 28b) для смешивания отфильтрованных сигналов каждого канала с указанной первой выбранной гармоникой указанной частоты модуляции для получения двух первичных значений амплитуды (I и Q),
второй набор фильтров (26а, 26b) для фильтрации указанных IF-сигналов для получения отфильтрованного сигнала, соответствующего второй выбранной гармонике указанной частоты модуляции,
второй набор IF-смесителей (29а, 29b) для смешивания отфильтрованных сигналов каждого канала с указанной второй выбранной гармоникой указанной частоты модуляции для получения двух вторичных значений амплитуды (I и Q), и
схему (11) обработки, подключенную с возможностью приема сигналов с выхода указанных IF-смесителей и выполненную с возможностью:
вычисления реальных характеристик фазы каждого отдельного принятого импульса относительно соответствующего отдельного переданного импульса на основе указанных первичных значений амплитуды и определения измерения расстояния на основе указанных реальных характеристик фазы, и
получения оценки указанного расстояния на основе соотношения между указанными первичными и вторичными значениями амплитуды.
19. Система по п. 18, отличающаяся тем, что приемопередатчик (10) выполнен с возможностью осуществления частотной модуляции каждого импульса несущей волны с использованием случайной модуляции.
20. Система по п. 18, отличающаяся тем, что приемопередатчик (10) выполнен с возможностью осуществления частотной модуляции каждого импульса несущей волны с использованием периодической модуляции с некоторой частотой модуляции.
21. Система по п. 20, отличающаяся тем, что частотная модуляция представляет из себя синусоидальную или треугольную модуляцию.
22. Система по п. 18, отличающаяся тем, что приемопередатчик (10) содержит схему (20) управления с обратной связью, обеспечивающую отклонение при обеспечении точности частоты менее 1/1000.
23. Система по п. 18, отличающаяся тем, что приемопередатчик (10) выполнен с возможностью выбора центральной частоты каждого импульса в соответствии с частотной схемой в пределах заранее определенного частотного диапазона.
24. Система по п. 23, отличающаяся тем, что приемопередатчик (10) выполнен с возможностью обеспечения указанного заранее определенного частотного диапазона, превышающего 10% средней центральной частоты.
25. Система по п. 18, отличающаяся тем, что приемопередатчик (10) выполнен с возможностью обеспечения коэффициента заполнения указанной последовательности импульсов менее 50%.
26. Система по п. 25, отличающаяся тем, что приемопередатчик (10) выполнен с возможностью обеспечения коэффициента заполнения указанной последовательности импульсов менее 5%.
| СПОСОБ ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2416807C2 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| US6362775 B1, 26.03.2002. | |||

