Предлагаемое изобретение относится к области подводной навигации, а именно, к определению местоположения подводного объекта посредством гидроакустической навигационной системы и может быть использовано для определения навигационных параметров (азимута, дальности, наклонного расстояния) подводного объекта, например, автономного или телеуправляемого подводного аппарата, донной станции относительно обеспечивающего судна.
Известен способ [1] навигации, где исследуемый полигон акватории координируют тремя акустическими маяками-ответчиками, с которыми подводный объект взаимодействует, получая запрос и передавая свой акустический сигнал, а маяки передают на судно обеспечения их расстояния до объекта. На судне вычисляют координаты объекта как точку пересечения трех сфер. Этот способ громоздок, требует больших затрат судового времени для развертывания и дорог в эксплуатации.
Наиболее близким к предлагаемому изобретению по технической сути (прототипом) является гидроакустический способ [2] определения относительно судна обеспечения местоположения подводного объекта, заключающийся в снабжении подводного объекта, находящегося на дне, маяком-пингером, излучающим в водную среду периодические акустические навигационные сигналы, в определении значения скорости звука с в воде акватории проведения работ и сохранении его в соответствующей форме на судне обеспечения, в размещении на судне обеспечения генератора, формирующего опорные периодические сигналы, аналогичные сигналам маяка-пингера, в предварительной синхронизации сигналов маяка-пингера и сигналов судового генератора, в осуществлении приема навигационных сигналов, приходящих от маяка-пингера подводного объекта на судовую приемную гидроакустическую антенну по прямому лучу, в сравнении принятых навигационных сигналов маяка-пингера с опорными сигналами судового генератора, в фиксации моментов приема навигационных сигналов маяка-пингера и измерении их временного смещения ΔT относительно опорных сигналов судового генератора, в вычислении наклонного расстояния R по прямому лучу от подводного объекта до судовой приемной антенны путем нахождения произведения временного смещения ΔT на скорость звука с в воде: R=ΔT⋅c, во вращении судовой приемной антенны относительно ее вертикальной оси и фиксации пеленга α на маяк-пингер подводного объекта относительно курса судна по минимуму амплитуды принимаемого сигнала, в определении глубины акватории под судном h с применением судового эхолота, в определении из геометрического построения прямоугольного треугольника, в котором глубина акватории h под судном является первым катетом, а наклонное расстояние R по прямому лучу от подводного объекта до судовой приемной антенны служит гипотенузой, второго катета, соответствующего проекции гипотенузы на горизонтальную поверхность дна, принимаемого в качестве дальности D по горизонтали от судовой приемной антенны до подводного объекта, в использовании значений дальности D и пеленга α в качестве ориентировочных координат подводного объекта относительно судна обеспечения.
Определение координат подводного объекта относительно судна обеспечения в способе-прототипе базируется на предположении о прямолинейном распространении акустического навигационного сигнала от маяка-пингера подводного объекта до обслуживающего судна. Данное предположение справедливо при работе в гидроакустическом канале с углами распространения гидроакустических сигналов в пределах ±80°, отсчитываемых от вертикали [3].
Выполнение операций по определению местоположения подводного объекта относительно судна обеспечения в способе-прототипе осуществляется в следующей последовательности.
1. Навигационные сигналы, периодически передаваемые маяком-пингером подводного объекта, принимаются на судне, для каждого из них измеряется смещение (задержка) ΔT относительно соответствующих опорных сигналов, формируемых судовым генератором.
2. Измеренные временные смещения ΔT принятых навигационных сигналов используют для последовательного получения оценок наклонного расстояния до подводного объекта R по прямому лучу от маяка-пингера подводного объекта до судовой приемной антенны с минимумом диаграммы направленности в горизонтальной плоскости путем вычисления произведения упомянутого временного смещения ΔT на скорость звука с в воде: R=ΔT⋅c; значение скорости звука в воде с должно быть предварительно измерено и зафиксировано в соответствующем виде на судне.
3. Вращая судовую приемную антенну с минимумом диаграммы направленности в горизонтальной плоскости относительно ее вертикальной оси, фиксируют пеленг α на маяк-пингер подводного объекта относительно курса судна по минимуму амплитуды принимаемых навигационных сигналов.
4. Одновременно определяют глубину h акватории под судном с применением судового эхолота.
5. Определяют из геометрического построения прямоугольного треугольника, в котором глубина акватории h под судном является первым катетом, а наклонное расстояние R по прямому лучу от подводного объекта до судовой приемной антенны служит гипотенузой, второго катета соответствующего проекции гипотенузы на горизонтальную поверхность дна, принимаемого в качестве дальности D по горизонтали от судовой приемной антенны до подводного объекта.
6. Используют дальность D и пеленг α в качестве ориентировочных координат подводного объекта относительно судна обеспечения.
Известный способ обладает ограниченными функциональными возможностями, которые могут приводить к ошибкам в определении координат подводного объекта. В частности, кроме навигационных сигналов, распространяющихся от подводного объекта по прямому лучу, на судовую приемную антенну с минимумом диаграммы направленности в горизонтальной плоскости могут дополнительно приходить задержанные по времени сигналы маяка-пингера. Их появление связано с возможными отражениями навигационных сигналов от подводных природных пространственных неоднородностей, например, существенных неровностей дна, искусственных сооружений и прочих возможных отражающих поверхностей.
В случае прямолинейного распространения акустических сигналов от маяка-пингера подводного объекта первым судовой приемной антенны достигает навигационный сигнал, распространяющийся по прямому лучу и проходящий наименьшее расстояние, остальные сигналы, распространяющиеся по более сложным траекториям и проходящие большие расстояния, получают дополнительную задержку.
Критерием для выделения на судне навигационного сигнала, пришедшего от подводного объекта по прямому лучу, в способе-прототипе является минимальное время распространения сигнала до судовой приемной антенны, которое проявляется на судне как минимальная величина временной задержки принимаемого навигационного сигнала относительно опорного сигнала, генерируемого судовым генератором.
Покажем, что применение указанного критерия выделения прямого луча навигационного сигнала (по минимуму задержки относительно опорного сигнала) может приводить к ошибкам в определении местоположения подводного объекта.
Фиг. 1 иллюстрирует некоторые характерные примеры взаимного расположения судна обеспечения 1 и подводного объекта 2, оборудованного маяком-пингером 3, в процессе определения координат подводного объекта относительно судна обеспечения.
На фиг. 1a представлен случай однолучевого распространения гидроакустического навигационного сигнала между маяком-пингером подводного объекта и судном обеспечения.
На фиг. 1б и 1в представлены случаи двухлучевого распространения гидроакустического навигационного сигнала между маяком-пингером подводного объекта и судном обеспечения, когда на судовую приемную гидроакустическую антенну с минимумом диаграммы направленности в горизонтальной плоскости кроме навигационных сигналов, пришедших от подводного объекта по прямому лучу, поступают задержанные отраженные сигналы.
Временные диаграммы, поясняющие принцип определения запаздывания принимаемых на судне навигационных сигналов маяка-пингера подводного объекта относительно соответствующих опорных сигналов, формируемых судовым генератором, для случаев, представленных на фиг. 1, приведены на фиг. 2.
По оси ординат на временной диаграмме откладывается время, выраженное в относительных единицах - периодах следования импульсных навигационных сигналов и сигналов судового генератора опорных сигналов, где периоды обозначены номерами соответствующих импульсов п. Начало импульсов навигационных сигналов маяка-пингера, передаваемых от подводного объекта, совпадает по времени с началом аналогичных периодических импульсов, формируемых судовым генератором.
Представленные на диаграмме фиг. 2 импульсы с номерами «1», «2» соответствуют однолучевому распространению сигналов от маяка-пингера подводного объекта до судна, когда на судовую приемную антенну поступает только один навигационный сигнал, пришедший по прямому лучу.
Такой характер распространения навигационных сигналов от маяка-пингера подводного объекта до судна соответствует случаю, представленному на фиг. 1а. Измеренные задержки ΔT1 и ΔT2 принятых на судне навигационных сигналов относительно одноименных опорных сигналов, используются для расчета соответствующих наклонных расстояний R1 и R2 по прямому лучу от маяка-пингера подводного объекта до судна.
Помеченные на диаграмме фиг. 2 импульсы с номерами «i», «i+1», «k», «k+1» и «k+2» соответствуют двухлучевому распространению сигналов от маяка-пингера подводного объекта до судна, когда на судовую приемную антенну дополнительно, вслед за навигационным сигналом, пришедшим по прямому лучу, поступает задержанный из-за отражения навигационный сигнал.
Отличие случаев, отмеченных импульсами с номерами «i», «i+1» и импульсами с номерами «k», «k+1» и «k+2», заключается в длительностях временных интервалов, за которые передаваемые от подводного объекта акустические навигационные сигналы достигают судовой приемной антенны, распространяясь по траекториям прямого и отраженного лучей.
В случае, представленном на фиг. 1б, передаваемые маяком-пингером подводного объекта акустические навигационные сигналы, распространяясь по траекториям прямого и отраженного лучей, достигают судовой приемной антенны, за промежуток времени, не превышающий длительности периода повторения опорных сигналов, формируемых судовым генератором.
В случае, представленном на фиг. 1в, передаваемые от подводного объекта акустические навигационные сигналы, распространяющиеся по траектории отраженного луча, достигают судовой приемной антенны за промежуток времени, превышающий длительность периода передачи импульсных сигналов от подводного объекта.
На фиг. 2 сплошными линиями показаны временные задержки навигационных импульсов в процессе их распространения от маяка-пингера подводного объекта до судовой приемной антенны по траектории прямого луча, пунктирными линиями - временные задержки навигационных импульсов в процессе их распространения от маяка-пингера подводного объекта до судовой приемной антенны по траектории отраженного луча.
Напомним, что в способе-прототипе критерием выделения на судне импульсов навигационного сигнала, пришедших от подводного объекта по прямому лучу, является минимум их временной задержки относительно одноименных опорных импульсов, формируемых судовым генератором опорного сигнала.
В представленном на фиг. 2 примере приема на судне двухлучевого навигационного сигнала с номерами импульсов «i», «i+1», первыми после соответствующих опорных сигналов, формируемых судовым генератором, будут приняты навигационные сигналы, приходящие от подводного объекта по прямому лучу и имеющие наименьшую задержку. Осуществляется прием этих сигналов, измеряются задержки ΔTi, ΔTi+1 относительно соответствующих опорных сигналов.
Измеренные задержки ΔTi, ΔTi+1 используются для расчета соответствующих наклонных дальностей Ri, Ri+1 по прямому лучу от подводного объекта до судна, навигационные сигналы с большими задержками игнорируются.
В случае, представленном на фиг. 1в, передаваемые навигационные сигналы, распространяющиеся по траектории отраженного луча, достигают судовой приемной антенны за промежуток времени, превышающий длительность периода передачи импульсов от подводного объекта.
Определение задержки принятых на судне навигационных сигналов относительно соответствующих опорных сигналов в случае, представленном на фиг. 1в, иллюстрируется на временной диаграмме (фиг. 2) навигационными сигналами с номерами импульсов «k», «k+1 »и «k+2».
Акустический навигационный сигнал с номером импульса «k», переданный маяком-пингером подводного объекта и распространяющийся по траектории прямого луча, достигает судовой приемной антенны на интервале времени между k-м и (k+1)-м опорными импульсами.
Задержанный k-й импульс навигационного сигнала, переданный от подводного объекта, вследствие отражения от подводной неоднородности достигает судовой приемной антенны за промежуток времени, превышающий период передачи навигационных импульсов маяком-пингером, но раньше прихода по прямому лучу на судно обеспечения навигационного сигнала с номером импульса «k+1».
Запаздывание k-го импульса навигационного сигнала относительно опорного сигнала с номером импульса «k+1» судового генератора равняется  задержка же поступившего на судно по прямому лучу навигационного сигнала с номером импульса «k+1» относительно опорного сигнала с номером импульса «k+1» равняется ΔTk+1, при этом
задержка же поступившего на судно по прямому лучу навигационного сигнала с номером импульса «k+1» относительно опорного сигнала с номером импульса «k+1» равняется ΔTk+1, при этом  что приводит к ошибке в определении задержек прямого и отраженного сигналов по критерию минимальной задержки, вследствие абсолютно одинаковой структуры сравниваемых сигналов, не позволяющей осуществлять однозначное сопоставление одноименных опорных и принимаемых навигационных импульсов.
что приводит к ошибке в определении задержек прямого и отраженного сигналов по критерию минимальной задержки, вследствие абсолютно одинаковой структуры сравниваемых сигналов, не позволяющей осуществлять однозначное сопоставление одноименных опорных и принимаемых навигационных импульсов.
В качестве прямого сигнала с номером импульса «k+1» на судне ошибочно принимается и обрабатывается задержанный k-й импульс навигационного сигнала, навигационный же сигнал с номером импульса «k+1», приходящий от подводного объекта по траектории прямого луча, игнорируется.
В результате расчета наклонное расстояние от подводного объекта до судна по прямому лучу  оказывается меньше истинного значения наклонного расстояния Rk+1 (Rk+1 = c⋅ΔTk+1).
оказывается меньше истинного значения наклонного расстояния Rk+1 (Rk+1 = c⋅ΔTk+1).
Количественно максимальная ошибка в определении наклонного расстояния может достигать величины истинного значения наклонного расстояния Rk+1, когда задержанный навигационный сигнал поступает на судно непосредственно после начала очередного опорного сигнала.
При этом оценка дальности между судном и подводным объектом также будет определена с ошибкой в сторону уменьшения относительно истинного значения, в пределе максимальная ошибка оценки дальности может достигать величины самой дальности.
Следовательно, ошибочное представление переотраженных навигационных сигналов, приходящих от маяка-пингера с задержкой, превышающей период их повторения, в качестве сигналов, поступающих на судно по прямому лучу, приводит к неверному определению координат подводного объекта относительно судна обеспечения.
Таким образом, можно считать доказанным, что применение способа-прототипа при работе на акваториях с наличием подводных, отражающих акустические сигналы неоднородностей, может сопровождаться значительными ошибками в определении координат подводного объекта относительно судна обеспечения.
Целью заявляемого изобретения является уменьшение погрешностей определения координат подводного объекта относительно судна обеспечения при работе на акваториях с наличием подводных, отражающих акустические сигналы неоднородностей.
Поставленная цель достигается тем, что в способе определения относительно судна обеспечения местоположения подводного объекта, заключающемся в снабжении подводного объекта, находящегося на дне, маяком-пингером, излучающим в водную среду периодические акустические навигационные сигналы, в определении значения скорости звука с в воде акватории проведения работ и сохранении его в соответствующей форме на судне обеспечения, в размещении на судне обеспечения генератора, формирующего опорные периодические сигналы, аналогичные сигналам маяка-пингера, в предварительной синхронизации сигналов маяка-пингера и сигналов судового генератора, в осуществлении приема навигационных сигналов, приходящих от маяка-пингера подводного объекта на судовую приемную гидроакустическую антенну по прямому лучу, в сравнении принятых навигационных сигналов маяка-пингера с опорными сигналами судового генератора, в фиксации моментов приема навигационных сигналов маяка-пингера и измерении их временного смещения ΔT относительно опорных сигналов судового генератора, в вычислении наклонного расстояния R по прямому лучу от подводного объекта до судовой приемной антенны путем нахождения произведения временного смещения ΔT на скорость звука с в воде: R=ΔT⋅c, во вращении судовой приемной антенны относительно ее вертикальной оси и фиксации пеленга α на маяк-пингер подводного объекта относительно курса судна по минимуму амплитуды принимаемого сигнала, в определении глубины акватории под судном h с применением судового эхолота, в определении из геометрического построения прямоугольного треугольника, в котором глубина акватории h под судном является первым катетом, а наклонное расстояние R по прямому лучу от подводного объекта до судовой приемной антенны служит гипотенузой, второго катета соответствующего проекции гипотенузы на горизонтальную поверхность дна, принимаемого в качестве дальности D по горизонтали от судовой приемной антенны до подводного объекта, в использовании значений дальности D и пеленга α в качестве ориентировочных координат подводного объекта относительно судна обеспечения, дополнительно устанавливают в непосредственной близости от судовой приемной антенны с минимумом диаграммы направленности в горизонтальной плоскости вторую судовую приемную антенну с круговой диаграммой направленности в нижней полусфере пространства под судном, которую используют для приема навигационных сигналов, приходящих от маяка-пингера подводного объекта по прямому лучу, выделяя их среди задержанных сигналов, отраженных от подводных неоднородностей, по максимуму амплитуды, фиксируют пеленг на маяк-пингер подводного объекта относительно курса судна по минимуму амплитуды сигналов на выходе судовой приемной антенны в моменты времени, совпадающие с временным положением сигналов на выходе второй судовой приемной антенны, пришедших по прямому лучу.
Использование максимума амплитуды выходного сигнала второй судовой приемной антенны в качестве критерия для выделения навигационных сигналов, приходящих от маяка-пингера подводного объекта по прямому лучу, среди сигналов, поступающих на судно обеспечения в результате отражения от подводных неоднородностей, основывается на том факте, что акустические навигационные сигналы, распространяющиеся от маяка-пингера подводного объекта до второй судовой приемной антенны по прямому лучу, проходят меньшее расстояние по сравнению с расстояниями, которые проходят переотраженные навигационные сигналы, распространяющиеся от маяка-пингера подводного объекта до судовой приемной антенны по более сложным траекториям.
В процессе распространения акустические навигационные сигналы подвергаются затуханию. Величину затухания акустического сигнала, распространяющегося от излучателя на расстояние r, в гидроакустике оценивают произведением коэффициента пространственного затухания сигнала β на пройденное сигналом расстояние r [3].
Обычно в гидроакустике затухание сигнала оценивают в логарифмических единицах, в этом случае коэффициент пространственного затухания акустического сигнала β должен иметь размерность [дБ/км], а расстояние r выражается в [км] [3].
Акустические навигационные сигналы, распространяющиеся от маяка-пингера подводного объекта до второй судовой приемной антенны по прямому лучу, проходят расстояние rпр, а переотраженные навигационные сигналы, распространяющиеся от маяка-пингера подводного объекта до судовой приемной антенны по более сложным траекториям, преодолевают расстояние rотр, причем rпр<rотр. Вследствие этого переотраженные навигационные сигналы, распространяющиеся от маяка-пингера подводного объекта до судовой приемной антенны претерпевают дополнительное затухание относительно затухания прямых сигналов на величину β(rотр-rпр)
Поэтому акустические навигационные сигналы, распространяющиеся от маяка-пингера подводного объекта до судовой приемной антенны по прямому лучу, будут характеризоваться большей амплитудой по сравнению амплитудой переотраженных сигналов.
Таким образом, достижение положительного эффекта от применения заявляемого способа - повышение точности определения относительно судна обеспечения координат подводного объекта за счет более надежного различения на судне гидроакустического навигационного сигнала маяка-пингера подводного объекта, пришедшего по прямолинейной траектории, на фоне задержанных сигналов, приходящих по траекториям с отражениями, можно считать доказанным.
Представленная совокупность существенных признаков заявляемого способа имеет причинно-следственную связь с достигаемым техническим результатом, из чего можно заключить, что данное техническое решение является новым и обладает изобретательским уровнем, так как явным образом не следует из уровня техники и пригодно для практического применения.
Предлагаемое изобретение поясняется чертежами.
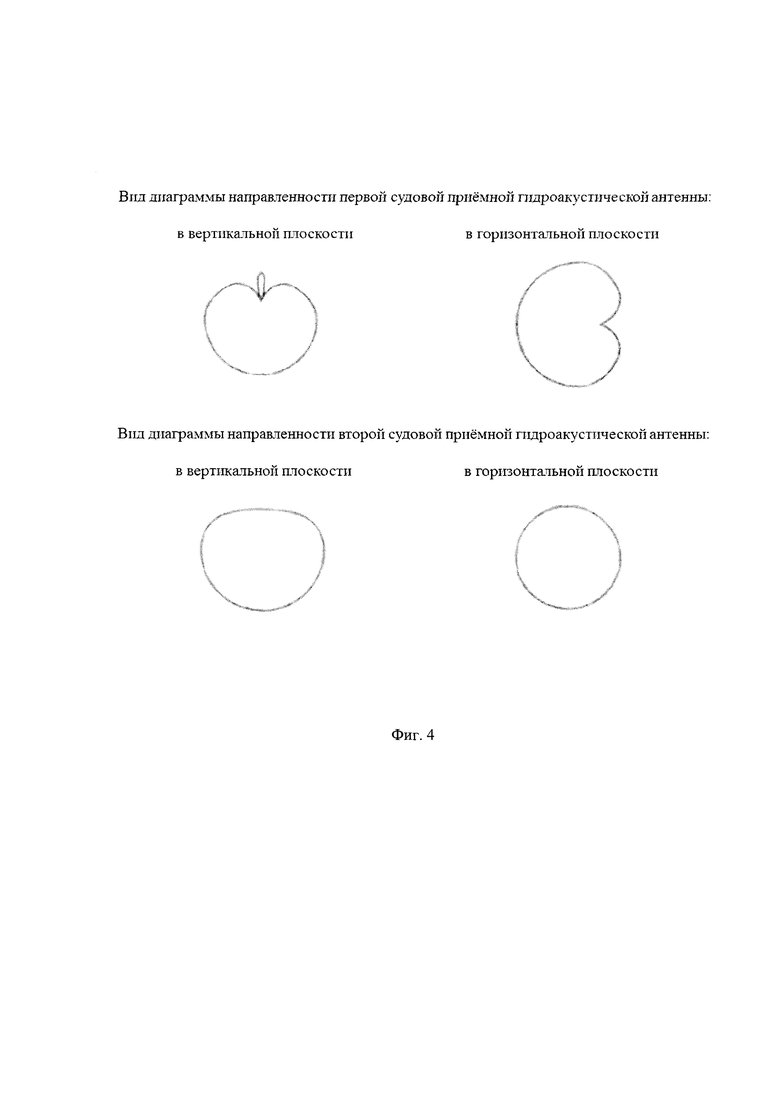
На фиг. 1 представлены характерные траектории распространения акустических навигационных сигналов от подводного объекта до судна обеспечения. На фиг. 2 приведены временные диаграммы, поясняющие принцип определения запаздывания навигационных сигналов подводного объекта относительно опорных сигналов судового генератора. На фиг. 3 поясняется техническая сущность заявляемого способа. На фиг. 4 показаны эскизы диаграмм направленности используемых судовых приемных антенн.
Размещаемое на судне обеспечения 1 оборудование, позволяющее определять ориентировочные координаты подводного объекта 2, находящегося на дне 10 и оборудованного маяком-пингером 3, состоит из последовательно соединенных судового генератора опорных сигналов 4, измерителя временного смещения 5, блока отображения 6 координат подводного объекта, из привода со штангой 7, на нижнем конце которой в непосредственной близости друг от друга закреплены судовая приемная антенна 8 с минимумом диаграммы направленности в горизонтальной плоскости и вторая судовая приемная гидроакустическая антенна 9 с круговой диаграммой направленности, охватывающей нижнюю полусферу акватории под судном.
Эскизы диаграмм направленности судовых гидроакустических приемных антенн в вертикальной и горизонтальной плоскостях приведены на фиг. 4.
Выходы судовых гидроакустических приемных антенн 8 и 9 с использованием соответствующих кабельных линий, проложенных, например, внутри штанги привода 7, соединены соответственно со вторым и третьим входами измерителя временного смещения 5, выход привода 7 с сигналом, отображающим в соответствующем виде угол между курсом судна 1 и направлением по горизонтали минимума диаграммы направленности судовой приемной антенны 8, подключен ко второму входу блока отображения 6 координат подводного объекта.
На судне обеспечения 1 также находится не приведенный на фиг. 3 судовой эхолот, который применяется в заявляемом способе для измерения глубины места под судном.
Сущность и техническая реализация заявляемого способа заключаются в последовательной реализации следующих действий.
1. Находящийся на судне обеспечения 1 генератор опорных сигналов 4 формирует периодические сигналы, соответствующие периодическим навигационным сигналам маяка-пингера 3 подводного объекта 2, находящегося на дне 10.
Предварительно, перед началом работы осуществляют синхронизацию судового генератора опорных сигналов 4 и генератора навигационных сигналов маяка-пингера 3, в результате моменты начала опорных сигналов на судне и соответствующих им навигационных сигналов, излучаемых маяком-пингером 3 подводного объекта 2, совпадают по времени.
2. Навигационные сигналы, излучаемые маяком-пингером 3 подводного объекта 2 в водную среду, достигают первой 8 и второй 9 судовых гидроакустических приемных антенн, преобразуются в электрические сигналы, усиливаются, при необходимости фильтруются и подаются соответственно на второй и третий входы измерителя временного смещения 5.
На судовые приемные антенны 8 и 9 кроме навигационных сигналов, пришедших от маяка-пингера 3 подводного объекта 2 по прямому лучу, могут поступать и задержанные сигналы, приходящие по траекториям с отражениями от подводных неоднородностей.
3. Выделение навигационных сигналов, пришедших от маяка-пингера 3 подводного объекта 2 на судно 1 по прямолинейной траектории из совокупности сигналов, приходящих и по отраженным лучам, осуществляют в измерителе временного смещения 5 на основе сравнения амплитуд сигналов с выхода второй судовой приемной антенны 9 на каждом из периодов следования опорных сигналов, формируемых судовым генератором, используют в качестве навигационных сигналов, пришедших по прямолинейной траектории, сигналы с максимальной амплитудой на выходе второй судовой приемной антенны 9, следующие за одноименными опорными сигналами, определяют их задержку ΔT относительно одноименных опорных сигналов, формируемых судовым генератором 4, рассчитывают наклонное расстояние до маяка-пингера R=ΔT⋅c. При этом сигналы с меньшими амплитудами на интервале времени между соседними опорными сигналами игнорируются.
4. Вращая вокруг вертикальной оси штангу привода 7, на нижнем конце которой установлены судовые приемные антенны 8 и 9, фиксируют пеленг α на маяк-пингер подводного объекта относительно курса судна по минимуму амплитуды сигналов на выходе судовой гидроакустической приемной антенны 8 в моменты времени, совпадающие с временным положением сигналов на выходе второй судовой приемной гидроакустической антенны 9, выделенных в качестве сигналов маяка-пингера подводного объекта, пришедших по прямому лучу.
5. С помощью судового эхолота измеряют глубину акватории h под судном.
6. Определяют из геометрического построения прямоугольного треугольника, в котором глубина акватории h под судном является первым катетом, наклонное расстояние R по прямому лучу от подводного объекта до судовой приемной антенны соответствует гипотенузе, второй катет, соответствующий проекции гипотенузы на горизонтальную поверхность дна, принимаемый в качестве дальности D по горизонтали от судовой приемной антенны до подводного объекта.
7. Передают значение дальности D в блок отображения 6 координат подводного объекта, в котором оно вместе с пеленгом α на подводный аппарат используются для отображения местоположения и ориентировочных относительно судна обеспечения координат подводного объекта.
Для практической реализации заявляемого способа могут быть использованы все устройства, указанные в качестве базовых для реализации способа-прототипа: и судна обслуживания, и судовые эхолоты, и судовая приемная антенна с минимумом диаграммы направленности в горизонтальной плоскости, и многоканальные осциллографы, в частности, многоканальные запоминающие осциллографы, которые позволяют не только фиксировать на судне принимаемые навигационные сигналы, но также измерять задержку принимаемых навигационных сигналов относительно опорных сигналов, формируемых на судне, а также отображать пеленг на подводный объект относительно курса судна. В качестве доступного маяка-пингера для оборудования подводного объекта может быть применен упомянутый в способе-прототипе маяк-пингер типа ELP-362A.
Новым элементом является дополнительно устанавливаемая на судне вторая судовая приемная антенна с круговой диаграммой направленности, охватывающей нижнюю полусферу акватории под судном. Необходимый вид ее диаграммы направленности в вертикальной и горизонтальной плоскостях приведен на фиг. 4.
В качестве второй судовой приемной антенны может быть применен, например, широкополосный сферический гидрофон компании Брюль и Къер модели 8105 [4].
Список использованных источников
1. Гидроакустическая навигационная система с длинной базой [Электронный ресурс] // URL: http://edboe.ru / (Дата обращения 25.06.2018).
2. Пат. 2593651, Российская Федерация, МПК G01S 15/00. Гидроакустический способ определения местоположения автономного подводного объекта / B.C. Комаров, М.С. Клюев, А.А. Шрейдер: заявитель и патентообладатель ФГБУН Институт океанологии им. П.П. Ширшова. №2015122080/28, заявл. 09.06.2015, опубл. 10.08.2016, Бюл. №22.
3. Матвиенко В.Н., Тарасюк Ю.Ф. Дальность действия гидроакустических средств. - 2-е изд., перераб. и доп. - Л.: Судостроение, 1981. - 205 с.
4. Сведения об изделии [Электронный ресурс] / Гидрофоны - типы 8103 - 8106. // URL: http://asm-tm.ru/wp-content/uploads/2014/08/8101-8106-Gidrofony-NEW-PD.pdf / (Дата обращения 25.06.2018).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АВТОНОМНОГО ПОДВОДНОГО АППАРАТА | 2015 |
|
RU2593651C1 |
| Способ определения местоположения подводного объекта | 2018 |
|
RU2709100C1 |
| Способ гидроакустического поиска автономного донного подводного объекта | 2019 |
|
RU2727331C1 |
| Способ скрытного гидроакустического поиска автономного донного подводного объекта | 2021 |
|
RU2762349C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| Гидроакустический комплекс позиционирования и связи для навигационно-информационного обеспечения автономных необитаемых подводных аппаратов | 2023 |
|
RU2812089C1 |



Изобретение относится к области подводной навигации, а именно к определению местоположения подводного объекта посредством гидроакустической навигационной системы, и может быть использовано для определения навигационных параметров (азимута, дальности, наклонного расстояния) подводного объекта. Достигаемый технический результат – уменьшение погрешностей определения координат подводного объекта относительно судна обеспечения. Указанный результат достигается за счет того, что дополнительно устанавливают в непосредственной близости от судовой приемной антенны с минимумом диаграммы направленности в горизонтальной плоскости вторую судовую приемную антенну с круговой диаграммой направленности в нижней полусфере пространства под судном, которую используют для приема навигационных сигналов, приходящих от маяка-пингера подводного объекта по прямому лучу, выделяя их среди задержанных сигналов, отраженных от подводных неоднородностей, по максимуму амплитуды, в фиксации пеленга на маяк-пингер подводного объекта относительно курса судна по минимуму амплитуды сигналов на выходе судовой приемной антенны в моменты времени, совпадающие с временным положением сигналов на выходе второй судовой приемной антенны, пришедших по прямому лучу. 4 ил.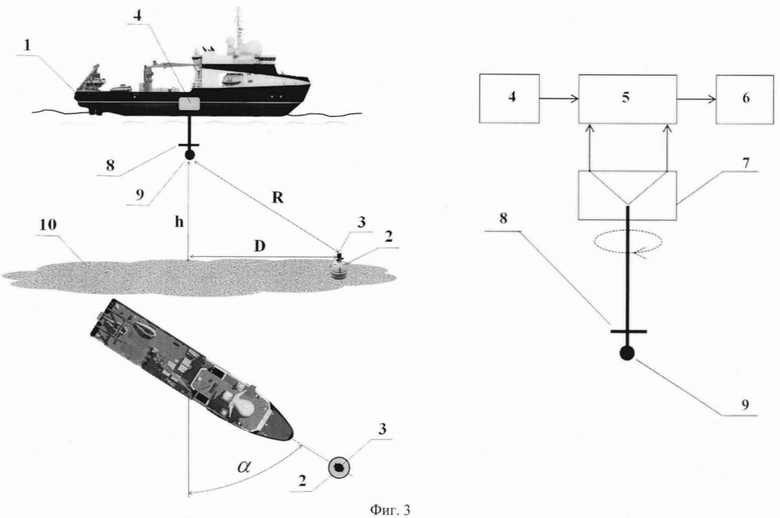
Способ определения местоположения подводного объекта относительно судна обеспечения, заключающийся в снабжении подводного объекта, находящегося на дне, маяком-пингером, излучающим в водную среду периодические акустические навигационные сигналы, в определении значения скорости звука в воде акватории проведения работ и сохранении его в соответствующей форме на судне обеспечения, в размещении на судне обеспечения генератора, формирующего опорные периодические сигналы, аналогичные сигналам маяка-пингера, в предварительной синхронизации сигналов маяка-пингера и сигналов судового генератора, в осуществлении приема навигационных сигналов, приходящих от маяка-пингера подводного объекта на судовую приемную гидроакустическую антенну по прямому лучу, в сравнении принятых навигационных сигналов маяка-пингера с опорными сигналами судового генератора, в фиксации моментов приема навигационных сигналов маяка-пингера и измерении их временного смещения относительно опорных сигналов судового генератора, в вычислении наклонного расстояния по прямому лучу от подводного объекта до судовой приемной антенны путем нахождения произведения временного смещения на скорость звука в воде, во вращении относительно вертикальной оси судовой приемной антенны с минимумом диаграммы направленности в горизонтальной плоскости, в фиксации пеленга на маяк-пингер подводного объекта относительно курса судна, при котором на выходе судовой приемной антенны наблюдается минимум амплитуды навигационного сигнала, приходящего по прямому лучу от подводного объекта, в измерении с использованием судового эхолота глубины акватории под судном, в определении из геометрического построения прямоугольного треугольника, в котором глубина акватории под судном является первым катетом, а наклонное расстояние по прямому лучу от подводного объекта до судовой приемной антенны служит гипотенузой, второго катета, соответствующего проекции гипотенузы на горизонтальную поверхность дна, принимаемого в качестве дальности по горизонтали от судовой приемной антенны до подводного объекта, в использовании значений дальности и пеленга в качестве ориентировочных координат подводного объекта относительно судна обеспечения, отличающийся тем, что дополнительно устанавливают в непосредственной близости от судовой приемной антенны с минимумом диаграммы направленности в горизонтальной плоскости вторую судовую приемную антенну с круговой диаграммой направленности в нижней полусфере пространства под судном, которую используют для приема навигационных сигналов, приходящих от маяка-пингера подводного объекта по прямому лучу, выделяя их среди задержанных сигналов, отраженных от подводных неоднородностей, по максимуму амплитуды, фиксируют пеленг на маяк-пингер подводного объекта относительно курса судна по минимуму амплитуды сигналов на выходе судовой приемной антенны в моменты времени, совпадающие с временным положением сигналов на выходе второй судовой приемной антенны, пришедших по прямому лучу.
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АВТОНОМНОГО ПОДВОДНОГО АППАРАТА | 2015 |
|
RU2593651C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ И КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 2014 |
|
RU2561012C1 |
| Способ определения координат подводного объекта гидроакустической системой подводной навигации с юстировочным маяком | 2016 |
|
RU2649073C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381518C2 |
| US 4951263 A, 21.08.1990 | |||
| WO 2007022233 A2, 22.02.2007 | |||
| CN 102621522 A, 01.08.12. | |||

