Изобретение относится к неразрушающему контролю материалов и может быть использовано при ультразвуковой дефектоскопии железнодорожных рельсов и иных изделий в других отраслях машиностроения.
Вследствие динамического воздействия колес подвижного состава на железнодорожные рельсы, недостаточно высокого металлургического качества рельсовой стали, нарушения требований инструкций по текущему содержанию пути, нарушений технологии сварки рельсов и обработки сварных стыков рельса и других причин рельс испытывает максимальные нагрузки, в связи с этим в рельсе по всему его сечению возникают большое количество разнообразных дефектов.
Из большого многообразия методов акустического контроля (ГОСТ 18576-96) [2] для дефектоскопии железнодорожных рельсов и своевременного выявления дефектов применяют следующие методы ультразвукового контроля - Эхо-метод (Фигура 1), Зеркально-теневой метод (Фигуры 2, 3, 4), Зеркальный метод (Фигуры 5, 6), Дельта-метод (Фигура 7), Эхо-зеркальный метод (Фигура 8) [3], стр. 51, 167.
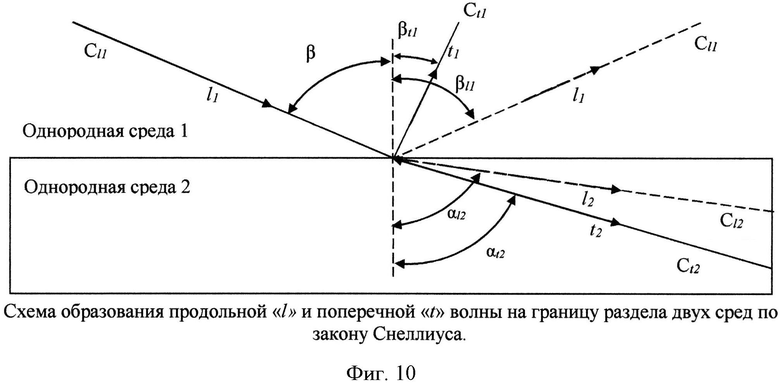
Эхо-метод ультразвукового контроля рельсов (Фигура 1) основан на излучении в рельс коротких зондирующих импульсов контактным пьезоэлектрическим преобразователем, работающим в совмещенном режиме излучения-приема ультразвуковых колебаний и в зависимости от угла ввода, возбуждающего в нем продольную «l2» или поперечную «t2» волну описанной законом Снеллиуса(sinβ)/Cl=(sinβl1)/Cl1=(sinβt1)/Ct1=(sinαl2)/Cl2=(sinαt2)/Ct2 (Фигура 10), где «β» - угол между падающим лучом (акустической осью) продольной волны «l», распространяющейся в первой среде и нормалью (перпендикуляром) к поверхности раздела двух сред, проходящей через точку падения, «βl1» - угол, отсчитываемый от нормали (перпендикуляра) к поверхности раздела двух сред, проходящей через точку падения и лучом (акустической осью) отраженной продольной волны «l1», распространяющейся в первой среде, «βt1» - угол, отсчитываемый от нормали (перпендикуляра) к поверхности раздела двух сред, проходящей через точку падения и лучом (акустической осью) поперечной отраженной трансформированной волны «t1», распространяющейся в первой среде, «αl2» - угол ввода ультразвуковых колебаний, отсчитываемый от нормали (перпендикуляра) к поверхности раздела двух сред, проходящей через точку падения и лучом (акустической осью) прошедшей преломленной продольной волны «l2», распространяющейся во второй среде, «αt2» - угол ввода ультразвуковых колебаний, отсчитываемый от нормали (перпендикуляра) к поверхности раздела двух сред, проходящей через точку падения и лучом (акустической осью) прошедшей переломленной трансформированной поперечной волны «t2», распространяющейся во второй среде, «Cl» - скорость продольной волны, падающей на границу раздела сред (в частности, призма преобразователя - рельс), «Cl1» - скорость отраженной продольной волны в первой среде (призма преобразователя), «Cl2» - скорость прошедшей преломленной продольной волны во второй среде (рельс), «Ct1» - скорость отраженной трансформированной поперечной волны в первой среде (призма преобразователя), «Ct2» - скорость пошедшей преломленной трансформированной поперечной волны во второй среде (рельс), «sin» - синус угла, отсчитываемый от нормали (перпендикуляра) к поверхности раздела двух сред, проходящей через точку падения и лучом (акустической осью) соответствующей волны. Регистрация эхо-сигналов основывается на приеме тем же пьезоэлектрическим преобразователем с места ввода ультразвуковых колебаний, возбужденных продольной «l2», либо поперечной «t2» волной с углом ввода ультразвуковых колебаний «αt2» от первого критического угла sinβкр1=Cl1/Cl2 до второго критического угла sinβкр2=Cl1/Ct2, описанной законом Снеллиуса [3] стр. 52-63, [9] стр. 101-104. Признаком регистрации дефекта служит срабатывание индикатора при превышении порогового уровня амплитуды эхо-сигнала поперечной волны «t2», если ввод ультразвуковых колебаний произведен наклонным пьезоэлектрическим преобразователем, и продольной волны «l2», если ввод ультразвуковых колебаний произведен прямым пьезоэлектрическим преобразователем.
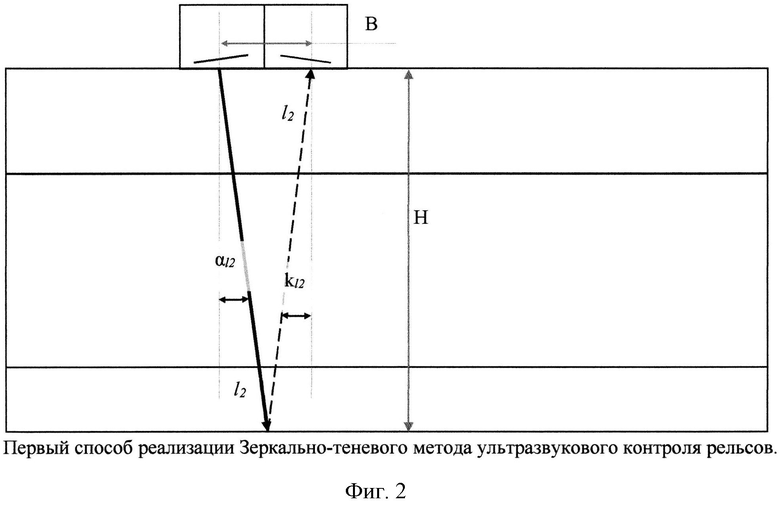
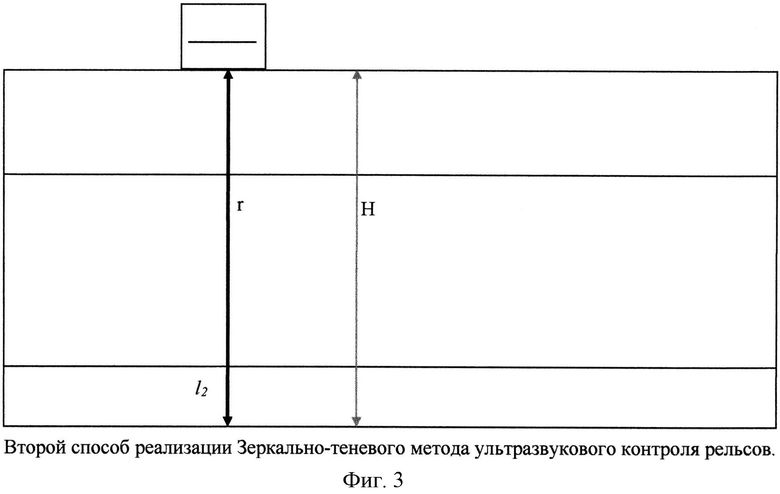
Зеркально-теневой метод ультразвукового контроля рельсов (Фигуры 2, 3, 4) основан на излучение в рельс коротких зондирующих импульсов контактным пьезоэлектрическим преобразователем и в зависимости от угла его призмы, возбуждающего в нем продольную «l2» или поперечную «t2» волну. Регистрация эхо-сигналов основывается на приеме с поверхности ввода ультразвуковых колебаний, эхо-сигналов, отраженных от противоположной (параллельной) горизонтально ориентированной поверхности к поверхности ввода ультразвуковых колебаний, возбужденных продольной волной «l2», или поперечной волной «t2». Для реализации зеркально-теневого метода в качестве излучателя и приемника ультразвуковых колебаний используются: одна пьезопластина, осуществляющая поочередное излучение и прием ультразвуковых колебаний - совмещенный пьезоэлектрический преобразователь; две рядом расположенные пьезопластины в отдельных корпусах, при этом они работают в раздельном режиме работы; две пьезопластины размещены в одном корпусе, причем приемная и предающая пьезопластины отделяются электроакустическим экраном - раздельно-совмещенный пьезоэлектрический преобразователь. Одним из принципов работы метода является использование направления диаграмм направленности преобразователей, работающих в различных режимах работы. Области контролируемого изделия, в которое преобразователь излучает и из которого принимает волны, различны. Поле излучения преобразователя - зависимость амплитуды излучения от положения исследуемой точки в пространстве (вероятного отражателя в рельсе). Поле приема - зависимость амплитуды принятого преобразователем эхо-сигнала от положения в пространстве точечного источника излучения (вероятного отражателя в рельсе) [10] стр. 81. Использование пьезоэлектрических преобразователей, работающих в различных режимах работы ультразвуковых колебаний, разделяет их диаграммы направленности на диаграмму направленности преобразователя, излучающего ультразвуковые колебания, и диаграмму направленности преобразователя, принимающего ультразвуковые колебания. Акустическая ось диаграммы направленности преобразователя, излучающего или принимающего ультразвуковые колебания, в зависимости от ориентации, конфигурации, размеров, класса поверхности отражателя и его места расположения в сечении объекта контроля может быть направлена к поверхности сканирования под различными углами: «α» - угол ввода ультразвуковых колебаний и «k» - угол приема ультразвуковых колебаний. Для реализации Зеркально-теневого метода принято считать, что диаграммы направленности преобразователя в режиме излучения и приема совпадают [3], стр. 33, соответственно угол ввода «α» и угол приема «k» равны, а значит противоположная (параллельная) горизонтально ориентированная поверхность к поверхности ввода ультразвуковых колебаний - зеркальная поверхность. Использование пьезоэлектрических преобразователей, работающих в различных режимах работы, позволяет реализовать различные способы контроля.
Способ 1 (Фигура 2). На поверхность катания головки рельса, на его продольную ось устанавливают пьезоэлектрический преобразователь, работающий в раздельно-совмещенном режиме работы с углом ввода «αl2» и «kl2» ультразвуковых колебаний от 0° до 6°, размещенных на расстоянии «В», рассчитанном из выражения B=2Htgαl2, где «Н» - расстояние от поверхности ввода ультразвуковых колебаний до донной поверхности рельса, «tg» - тангенс угла, отсчитываемый от нормали (перпендикуляра) к поверхности раздела двух сред, проходящей через точку падения и лучом (акустической осью) продольной волны «l2», акустические оси которых направлены друг на друга, образуя тем самым равнобедренный треугольник с основанием на поверхности катания головки рельса и с вершиной в зоне вероятного отражателя в сечении рельса, с равными углами разворота относительно продольной оси рельса, работающими в раздельном режиме работы, для регистрации максимальной амплитуды при отражении на границе раздела двух сред. Признаком регистрации дефекта служит ослабление амплитуды эхо-сигналов продольной волны «l2», отраженных от донной поверхности и возбужденных продольной волной «l2».
Способ 2 (Фигура 3). На поверхность катания головки рельса, на его продольную ось устанавливают пьезоэлектрический преобразователь, работающий в совмещенном режиме работы с углом ввода ультразвуковых колебаний 0°. Признаком регистрации дефекта служит ослабление амплитуды эхо-сигналов продольной волны «l2», отраженных от донной поверхности и возбужденных продольной волной «l2».
Способ 3 (Фигура 4). На поверхность катания головки рельса, вдоль его продольной оси устанавливают два наклонных пьезоэлектрических преобразователя, размещенных на расстоянии «В», рассчитанном из выражения B=2Htgαt2, акустические оси которых направлены друг на друга, образуя тем самым равнобедренный треугольник с основанием на поверхности катания головки рельса и с вершиной на донной поверхности, с равными углами разворота относительно продольной оси рельса, работающими в совмещенном режиме работы, для регистрации максимальной амплитуды при отражении на границе раздела двух сред, при этом каждый из преобразователей является и излучателем ультразвуковых колебаний и приемником эхо-сигналов. Признаком регистрации дефекта служит ослабление амплитуды эхо-сигналов поперечной волны «t2», отраженных от донной поверхности и возбужденных поперечной волной «t2».
При реализации зеркально-теневого метода анализируют только амплитуду донного сигнала, выделяя его достаточно узким стробирующим импульсом. При этом возможные эхо-сигналы от дефектов в толще изделия не рассматриваются [3], стр. 64-70.
Зеркальный метод ультразвукового контроля рельсов (Фигуры 5, 6) основан на излучении в рельс коротких зондирующих импульсов, возбуждающих в нем поперечную волну «t2» контактным пьезоэлектрическим преобразователем, работающим в совмещенном режиме излучения-приема ультразвуковых колебаний. Регистрация эхо-сигналов основывается на приеме с поверхности ввода ультразвуковых колебаний однократно зеркально отраженных эхо-сигналов от поверхности горизонтальных дефектов и двух кратно зеркально отраженных эхо-сигналов от поверхности вертикальных дефектов, которые в свою очередь также зеркально отражены от противоположной параллельной поверхности, поверхности ввода ультразвуковых колебаний. Эхо-сигналы возбуждены поперечной волной «t2». Для реализации зеркального метода применяются наклонные пьезоэлектрические преобразователи с одинаковыми углами ввода, работающие в раздельном режиме излучения-приема ультразвуковых колебаний. Использование различных вариантов направлений акустических осей пьезоэлектрических преобразователей позволяет реализовать различные способы контроля.
Способ 1 (Фигура 5). На поверхность катания головки рельса, вдоль его продольной оси устанавливают два наклонных пьезоэлектрических преобразователя, размещенных на расстоянии «В», рассчитанном из выражения B=(2Htgαt2)-(2htgkt2), акустические оси диаграммы направленности преобразователей излучающего и принимающего ультразвуковые колебания направлены в одном направлении, с равными углами разворота относительно продольной оси рельса, работающими в раздельном режиме работы. Признаком регистрации дефекта служит срабатывание индикатора при превышении порогового уровня амплитуды зеркально отраженных эхо-сигналов поперечной волны «t2», возбужденных поперечной волной «t2».
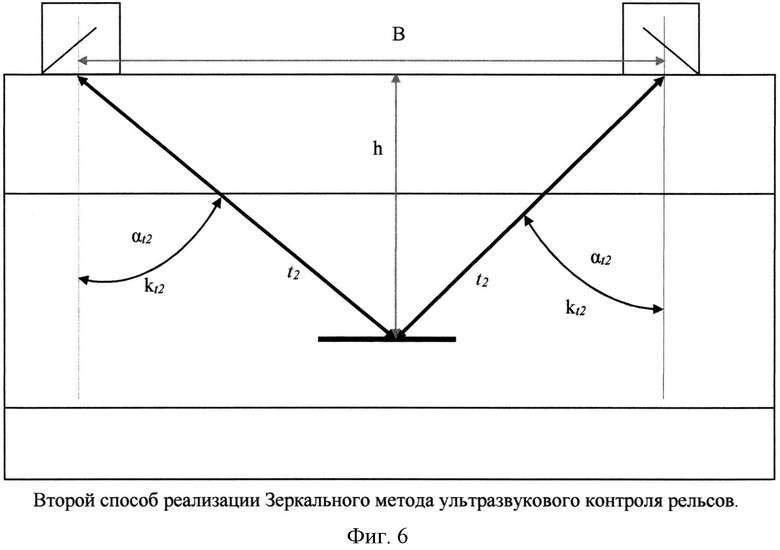
Способ 2 (Фигура 6). На поверхность катания головки рельса, вдоль его продольной оси устанавливают два наклонных пьезоэлектрических преобразователя, размещенных на расстоянии «В», рассчитанном из выражения B=2htgαt2, акустические оси которых направлены друг на друга, образуя тем самым равнобедренный треугольник с основанием на поверхности катания головки рельса и с вершиной на противоположной (параллельной) горизонтально ориентированной поверхности, с равными углами разворота относительно продольной оси рельса, работающими в совмещенном режиме работы, при этом каждый из преобразователей является и излучателем ультразвуковых колебаний и приемником эхо-сигналов. Признаком регистрации дефекта служит срабатывание индикатора при превышении порогового уровня амплитуды зеркально отраженных эхо-сигналов поперечной волны «t2» возбужденных поперечной волной «t2» [3], стр. 70-71.
Дельта-метод ультразвукового контроля рельсов (Фигура 7) основан на излучении в рельс коротких зондирующих импульсов, возбуждающих в нем поперечную волну «t2» контактным пьезоэлектрическим преобразователем, работающим в совмещенном режиме излучения-приема ультразвуковых колебаний. Регистрация эхо-сигналов основывается на приеме с поверхности ввода ультразвуковых колебаний эхо-сигналов дифрагированной продольной волны «ld2», трансформированной на острых краях, плоских, перпендикулярно ориентированных отражателей к поверхности ввода ультразвуковых колебаний - дифракционная зона первого типа. Эхо-сигналы возбуждены преломленной поперечной волной «t2». Для реализации Дельта-метода ультразвукового контроля на поверхность катания головки рельса, вдоль его продольной оси устанавливают два пьезоэлектрических преобразователя, работающие в раздельном режиме излучения-приема ультразвуковых колебаний, размещенных на расстоянии «В», рассчитанном из выражения B=htgαt2, где акустическая ось наклонного преобразователя направлена на акустическую ось прямого преобразователя, образуя тем самым прямой треугольник с основанием на поверхности катания головки рельса и с вершиной в зоне вероятного образования дефекта, при этом в качестве излучателя применяется наклонный пьезоэлектрический преобразователь, а в качестве приемника эхо-сигналов прямой пьезоэлектрический преобразователь. Признаком регистрации дефекта служит срабатывание индикатора при превышении порогового уровня амплитуды эхо-сигналов дифрагированной продольной волны «ld2», возбужденных поперечной волной «t2», и эхо-сигналов продольной волны «l2», возбужденных дифрагированной продольной волной «ld2» [3], стр. 72.
Эхо-зеркальный метод ультразвукового контроля рельсов (Фигура 8) основан на излучении в рельс коротких зондирующих импульсов, возбуждающих в нем поперечную волну «t2» контактным пьезоэлектрическим преобразователем, работающим в совмещенном режиме излучения-приема ультразвуковых колебаний. Регистрация эхо-сигналов основывается на приеме с поверхности катания головки рельса, зеркально отраженных эхо-сигналов от дефекта, которые в свою очередь зеркально отражены от подголовочной грани головки рельса, возбужденных поперечной волной «t2». Для реализации Эхо-зеркального метода на поверхность катания головки рельса вдоль его продольной оси устанавливают два наклонных пьезоэлектрических преобразователя, один из которых работает в совмещенном режиме работы и излучает поперечные ультразвуковые колебания «t2», а второй работает в раздельном режиме работы в режиме приема ультразвуковых колебаний. Совместно они реализуют эхо- и зеркальный методы ультразвукового контроля - Эхо-зеркальный метод ультразвукового контроля. Преобразователи, размещенные на расстоянии «В», рассчитанном из выражения B=(2Htgαt2)-(2htgkt2), где акустические оси диаграммы направленности преобразователей, излучающего и принимающего ультразвуковые колебания, направлены в одном направлении, из условия приема сигнала от вертикального отражателя в боковой грани головки рельса, акустические оси которых направлены в одном направлении, с равными острыми углами разворота относительно продольной оси рельса к боковой грани головки рельса. Признаком регистрации дефекта служит срабатывание индикатора при превышении порогового уровня амплитуды эхо-сигналов поперечной волны «t2» возбужденных поперечной волной «t2» [3], стр. 149-170.
В вышеперечисленных методах и способах их реализации ультразвукового контроля, признаком обнаружения дефекта является регистрация эхо-сигналов, возбужденных поперечной либо продольной волной. Волновое уравнение ρ∂2u/dt2=(Λ+µ)grad divu+µΔu - дифференциальное уравнение 2-го порядка, описывающее связь изменения смещения или других акустических величин во времени и пространстве для изотропного твердого тела, показывает, что в неограниченной твердой среде существуют волны двух типов, которые распространяются с разными скоростями [8], стр. 5-8. Эхо-метод ультразвукового контроля, зеркально-теневой метод ультразвукового контроля, зеркальный метод ультразвукового контроля, эхо-зеркальный метод ультразвукового контроля, дельта-метод ультразвукового контроля основаны на посылке в контролируемое изделие коротких зондирующих импульсов, излучаемых пьезоэлектрической пластиной с углами ввода ультразвуковых колебаний «α» от 0° до 70°, углами разворота «γ» пьезоэлектрической пластины относительно продольной оси рельса от 0° до 34° строго по определенной траектории хода движения акустического луча и приеме, с помощью той же пьезоэлектрической пластины, работающей в совмещенном режиме излучения-приема ультразвуковых колебаний (эхо-метод ультразвукового контроля), или с помощью другой одной пьезоэлектрической пластины, работающей в раздельном режиме излучения-приема ультразвуковых колебаний на прием эхо-сигнала (зеркальный метод ультразвукового контроля, дельта-метод ультразвукового контроля, зеркально-теневой метод ультразвукового контроля), или с помощью второго пьезоэлектрического преобразователя, работающего в совмещенном режиме излучения-приема ультразвуковых колебаний (эхо-зеркальный метод ультразвукового контроля) с углами приема ультразвуковых колебаний «k» и углами разворота «γ», равными углам ввода «α», и углами разворота «γ», установленными строго на определенном расстоянии, исходя из условий наилучшего озвучивания зоны вероятного образования дефекта.
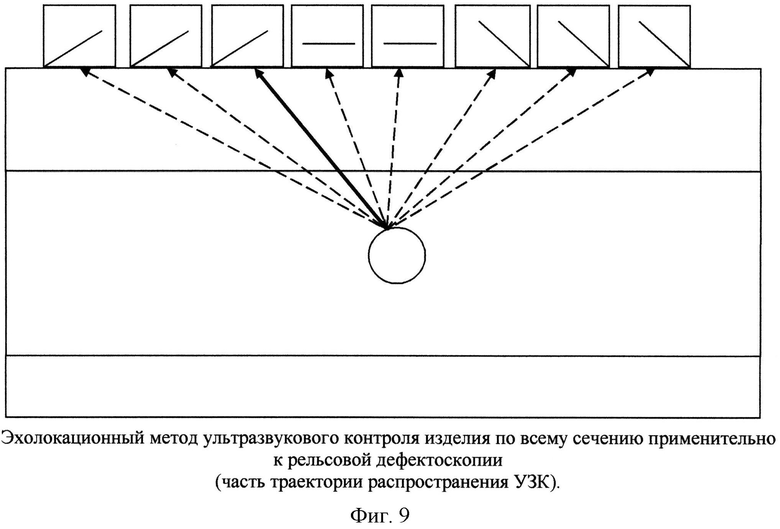
Эхолокационный метод ультразвукового контроля изделия по всему сечению (Фигура 9) основан на излучении в контролируемое изделие коротких зондирующих импульсов, возбуждающих в нем акустические колебания пьезоэлектрическим преобразователем, работающим в совмещенном режиме излучения-приема ультразвуковых колебаний. Регистрация эхо-сигналов основывается на приеме с поверхности сканирования контролируемого изделия множеством пьезоэлектрических пластин, работающих в раздельном режиме работы в режиме приема эхо-сигналов, возбужденных различными видами акустических волн на границе раздела сред. Для реализации Эхолокационного метода ультразвукового контроля на поверхность сканирования контролируемого изделия устанавливают множество пьезоэлектрических преобразователей с различными углами ввода ультразвуковых колебаний «α» от 0° до 90°, углами приема ультразвуковых колебаний «k» от 0° до 90° и углами разворота пьезоэлектрической пластины относительно оси контроля в контролируемом изделии «γ» от 0° до 90°, чередующих совмещенный и раздельный режимы своей работы по окончании цикла ультразвуковых колебаний, размещенные друг от друга вне зависимости от расстояния и места на поверхности сканирования контролируемого изделия относительно пьезоэлектрической пластины, излучающей ультразвуковые колебания. Цикл УЗК - это промежуток времени от момента ввода УЗК пьезоэлектрическим преобразователем с определенным углом ввода УЗК и углом разворота пьезоэлектрической пластины относительно продольной оси рельса в контролируемое изделие до момента приема ЭС множеством пьезоэлектрических преобразователей с различными углами приема ЭС и углами разворота пьезоэлектрических пластин относительно продольной оси рельса. Перемещая систему преобразователей вдоль оси объекта контроля, регистрируют эхо-сигналы, отраженные от отражателей вне зависимости от их ориентации, конфигурации и размеров, по всему сечению контролируемого изделия, за исключением «Скрытой зоны». Скрытая зона - область контролируемого изделия, не способная отражать эхо-сигналы в место нахождения пьезоэлектрических преобразователей, принимающих эхо-сигналы. Признаком регистрации дефекта служит срабатывание индикатора при превышении порогового уровня и ослабление амплитуды эхо-сигналов, возбужденных различными видами волн [5]. Явления рассеивания, распространения в упругой среде механического возмущения от источника колебаний являются основополагающим элементом Эхолокационного метода ультразвукового контроля. В однородной среде волны распространяются одинаково во все стороны от источника колебаний. Согласно принципу Гюйгенса каждая точка поверхности, которую достигла в данный момент волна, является точечным источником вторичных волн. В однородной среде от каждой точки волновой поверхности распространяется вторичная сферическая волна с одинаковой скоростью «υ» и расстоянием «ΔL». Поверхность, касательная ко всем вторичным волнам, представляет собой волновую поверхность в следующий момент времени. Волновой фронт в момент времени t+Δt образует точки, удаленные от первоначального фронта волны на расстоянии ΔL=υΔt в направлении прямой, перпендикулярной фронту волны. Однако на границе раздела сред с различными физическими свойствами картина распространения волн существенно изменяется. Волна может частично перейти из одной среды в другую, а частично отразиться от границы раздела и распространяться в первой среде [7], стр. 224-225. При наклонном падении акустической волны из одной твердой среды на границу с другой твердой средой на границе раздела двух сред происходят процессы отражения, преломления, трансформации. Каждая волна, возмущая среду, описывает поля распространения и рассеивания в широком интервале углов, то есть создает объемное звуковое поле. Это звуковое поле состоит из множества звуковых полей, созданных источником возбуждения, вторичной волной и последующими процессами отражения, преломления, трансформации волн. Часть полей, формирующихся акустическими волнами, объясняются законами геометрической оптики, другие формируются иным образом и не могут быть описаны законами геометрической оптики. Часть полей, которые не могут быть описаны законами геометрической оптики, называются дифракционными, то есть поля, формируемые особенностью отклонения направления распространения волн на границе раздела двух сред. Под дифракцией в широком смысле понимают явление, возникающее при встрече волны с препятствием. Амплитуда и фаза волны, встретившей в однородной среде препятствие, изменяются, и эта волна проникает в область тени, отклоняясь от прямолинейного пути. Звуковое поле состоит из акустических полей, которые формируются из траекторий распространения акустических волн. Основу звукового поля составляют геометрические поля, состоящие из траекторий, описанных законами геометрической оптики, которые связываются между собой сшивающими (дифракционными) полями, не допуская разрывов в звуковом поле, что в свою очередь позволяет перераспределить энергию в среде и осуществить передачу энергии без ее разрушения. В твердой среде описаны зоны четырех типов (Фигура 11), в которых законы геометрической оптики неприменимы. Первый тип: острые края плоских, перпендикулярно ориентированных отражателей к поверхности ввода ультразвуковых колебаний и, как предельный случай, края отражателя, с которыми соприкасается луч первичного поля, касаясь края отражателя, рассеивается во все стороны относительно точки поверхности. Края отражателя, которого достигла в данный момент волна, возбуждают дифракционные краевые волны - дифракционная зона первого типа. Второй тип: поверхности гладких круглых отражателей, которых касаются лучи первичного поля, формируют волны, огибающие поверхность отражателя, которые возбуждают дифракционные волны соскальзывания - дифракционная зона второго типа. Третий тип: поверхности ввода ультразвуковых колебаний на границе раздела двух сред или на свободной границе среды под первым, вторым или третьим критическими углами возбуждают дифракционные головные волны, которые в свою очередь возбуждают семейство дифракционных боковых волн в обеих средах - дифракционная зона третьего типа. Четвертый тип: в слоистых неоднородных средах, в которых групповая скорость меняется, образуются огибающие лучи, которые, двигаясь по разным направлениям, собираются в одной точке, возбуждают рефрагированные волны - дифракционная зона четвертого типа. Следует отметить, что эти типы дифракции не ограничивают все многообразие дифракционных полей в твердом теле. Все названные зоны являются источниками волн дифракции, которые, распространяясь в разных направлениях, проникают в озвучиваемую область и интерферируют в ней с отраженными и преломленными волнами, так и в область тени, образуя суммарное поле в объекте контроля [8], стр. 24-55. То есть каждая точка падения ультразвуковых колебаний на поверхности сканирования, которой достигла продольная волна, рассматривается как излучатель ультразвуковых колебаний и источник различного вида волн, которые позволяют реализовать различные способы Эхолокационного метода ультразвукового контроля.
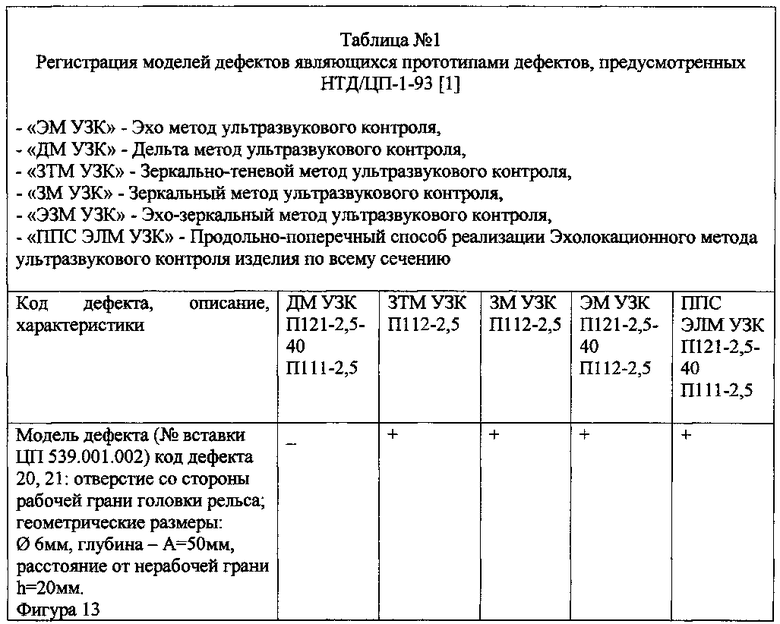
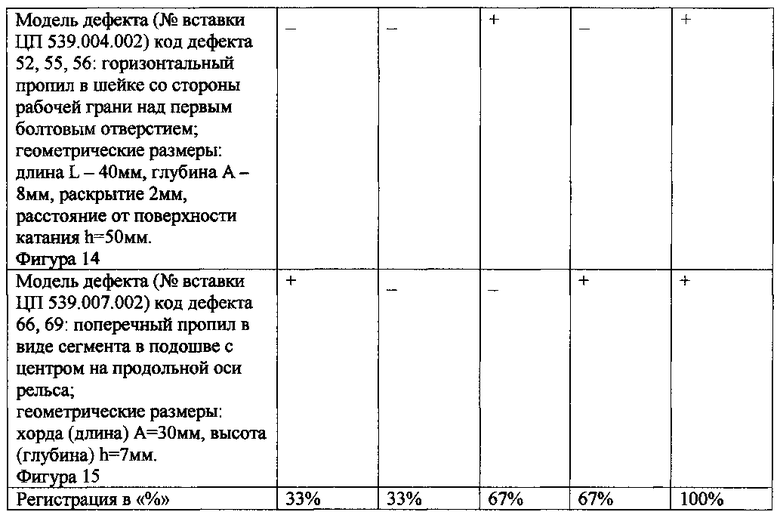
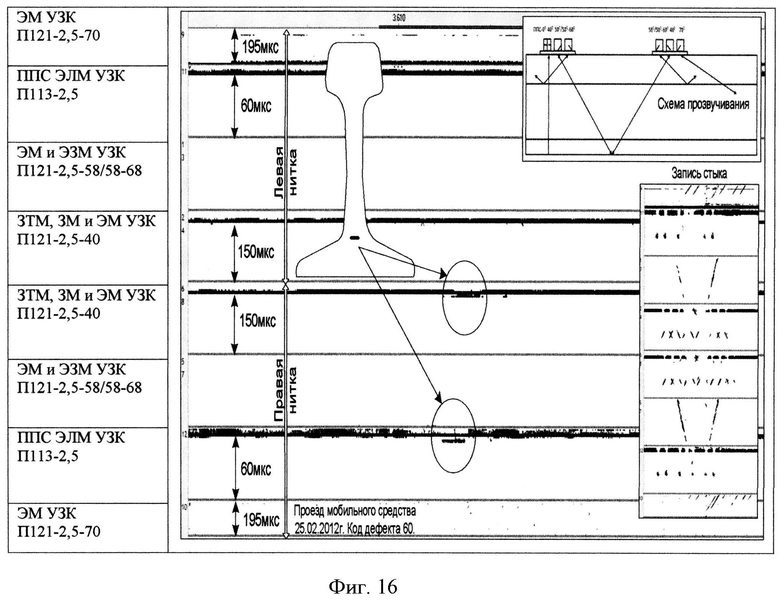
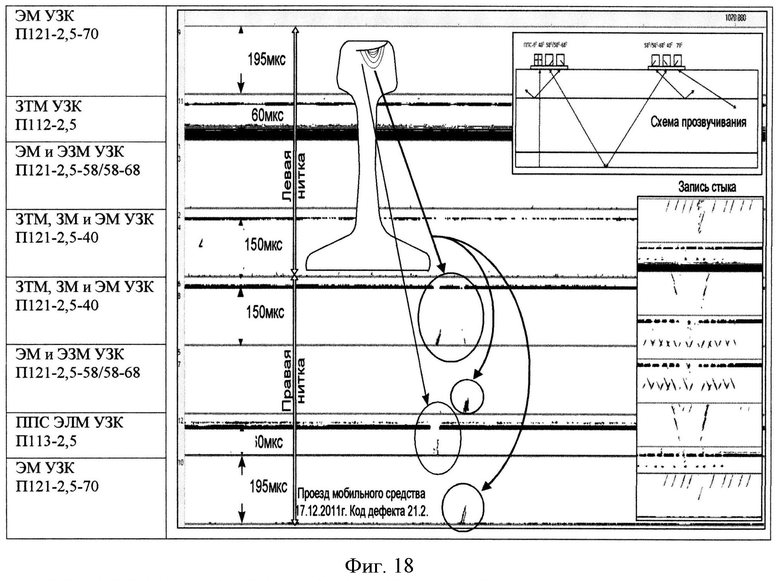
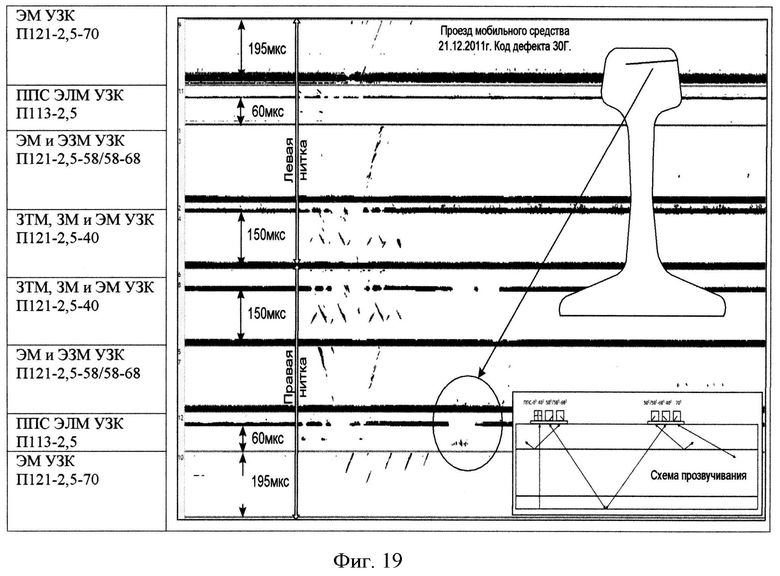
Продольно-поперечный способ реализации Эхолокационного метода ультразвукового контроля изделия по всему сечению (Фигуры 12, 20), далее по тексту «Продольно-поперечный способ ультразвукового контроля», основывается на излучении в контролируемое изделие коротких зондирующих импульсов наклонным пьезоэлектрическим преобразователем, возбуждающим в нем ультразвуковые колебания, работающим в совмещенном режиме работы излучения-приема ультразвуковых колебаний либо в раздельном режиме работы в режиме излучения ультразвуковых колебаний и регистрации эхо-сигналов, возбужденных прошедшей переломленной трансформированной поперечной волной «t2» и прошедшей переломленной трансформированной дифракционно-продольной волной «lk2», отраженными от вертикальных, вертикально ориентированных, горизонтальных и горизонтально ориентированных стандартных и нестандартных отражателей (дефектов), расположенных в проекции плоскости распространения ультразвуковых колебаний в контролируемом изделии, за исключением «Скрытой зоны», одним или множеством прямых пьезоэлектрических преобразователей в зависимости от поставленных целей, работающими в раздельном режиме работы, в режиме приема либо в совмещенном режиме работы в пропорциональной зависимости от амплитуд зондирующих импульсов между наклонным и прямыми преобразователями. Признаком регистрации отражателей в контролируемом изделии является одновременное срабатывание индикатора при превышении порогового уровня амплитуды эхо-сигналов отраженной дифракционно-продольной волны «lk2», возбужденных прошедшей переломленной трансформированной дифракционно-продольной волной «lk2», отраженной поперечной волны «t2» и отраженной трансформированной дифрагированной продольной волны «ld2», возбужденных прошедшей переломленной трансформированной поперечной волной «t2», и ослабление амплитуды эхо-сигналов отраженной дифракционно-продольной волны «lk2», отраженных от противоположной параллельной поверхности ввода ультразвуковых колебаний и возбужденных прошедшей преломленной трансформированной дифракционно-продольной волной «lk2». По параметрам принятых эхо-сигналов оценивают качественные характеристики отражателя. Результат достигается за счет того, что на поверхность сканирования рельса, на его продольную ось устанавливают систему пьезоэлектрических преобразователей, чередующих при необходимости работу совмещенного и раздельного режимов излучения-приема ультразвуковых колебаний по окончании цикла ультразвуковых колебаний, с различными углами ввода ультразвуковых колебаний, для поперечной волны «αt2», от первого критического угла sinβкр1=Cl1/Cl2 до второго критического угла sinβкр2=Cl1/Ct2, рассчитанных по закону Снеллиуса, углом разворота пьезоэлектрической пластины относительно продольной оси контролируемого изделия «γ» от 0° до 90°, углами приема эхо-сигналов «k» 0°, при этом излучение ультразвуковых колебаний в контролируемое изделие производится одним пьезоэлектрическим преобразователем с углом ввода ультразвуковых колебаний от первого критического угла sinβкр1=Cl1/Cl2 до второго критического угла sinβкр2=Cl1/Ct2 и углом разворота пьезоэлектрической пластины относительно продольной оси контролируемого изделия «γ» от 0° до 90°, а прием эхо-сигналов - одним или множеством прямых пьезоэлектрических преобразователей с углом приема эхо-сигналов 0°, в одном цикле ультразвуковых колебаний, установленных на поверхности ввода ультразвуковых колебаний на расстоянии «В», обеспечивающем регистрацию эхо-сигналов, отраженных от противоположной (параллельной) поверхности к поверхности ввода ультразвуковых колебаний между наклонной и прямыми пластинами, рассчитанном из выражения B=htgklk2, где «h» - расстояние от поверхности ввода ультразвуковых колебаний до зоны вероятного отражателя в сечении рельса, «klk2» - угол приема отраженной дифракционно-продольной волны «lk2», «tg» - тангенс угла, отсчитываемый от нормали (перпендикуляра) к поверхности раздела двух сред, проходящей через точку падения и лучом (акустической осью) отраженной дифракционно-продольной волны «lk2», где направление акустической оси наклонной пьезоэлектрической пластины может быть направлено в любую сторону относительно продольной оси рельса и акустической оси прямой пьезоэлектрической пластины. Угол приема «klk2» равен углу отраженной волны, распространяющейся в объекте контроля на границе раздела двух сред, где одной средой является контролируемое изделие, а другой средой является отражатель в контролируемом изделии, который расположен параллельно к поверхности ввода и приема ультразвуковых колебаний. Расстояние «В» и количество пьезоэлектрических пластин определяется исходя из поставленных задач по регистрации стандартных и нестандартных отражателей в рельсе. Эффективность работоспособности продольно-поперечного способа ультразвукового контроля проверена и подтверждается лабораторными опытами (Таблица №1, Фигуры 13, 14, 15,), а также практической реализацией на действующем мобильном средстве ультразвуковой дефектоскопии (Фигуры 16, 17, 18, 19).
Продольно-поперечный способ ультразвукового контроля рельсов позволяет:
1. Повысить достоверность ультразвукового контроля за счет регистрации прямыми пьезоэлектрическими преобразователями эхо-сигналов дифракционно-продольной «lk2», поперечной «t2», дифрагированной продольной «ld2» волн, возбужденных прошедшей преломленной трансформированной поперечной волной «t2» и прошедшей преломленной трансформированной дифракционно-продольной волной «lk2».
2. Повысить достоверность ультразвукового контроля за счет увеличения количества информации от донной поверхности рельса, полученной различными методами и способами ультразвукового контроля, и сложения ее в единое информационной поле, обеспечив тем самым стабильность регистрации донного сигнала.
3. Принимать прямым пьезоэлектрическим преобразователем эхо-сигналы, отраженные от отражателей в объекте контроля с различной ориентацией, конфигурацией, размерами, расположением в сечении и классом поверхности отражателя.
4. Применять способ ультразвукового контроля в действующих системах ультразвукового контроля как в железнодорожной дефектоскопии, так и в различных отраслях машиностроения в независимости от уровня техники.
Литература
1. Каталог дефектов рельсов. НТД/ЦП-1-93 «Классификация дефектов рельсов» МПС РФ. М.: Издательство «Транспорт», 1993 год.
2. ГОСТ 18576-96 от 04.10.1996 года Контроль неразрушающий. Рельсы железнодорожные. Методы ультразвуковые.
3. Марков А.А. Шпагин Д.А., Ультразвуковая дефектоскопия рельсов. 2-е изд., перераб. и допол. - СПб.: «Образование - Культура», 2008.
4. Марков А.А., Шпагин Д.А. Ультразвуковая дефектоскопия рельсов, - СПб.: «Образование - Культура», 1999.
5. Патент 2442152, МПК G01N 29/04. Эхолокационный метод ультразвукового контроля по всему сечению / Корепанов А.А., Князев Д.А. - Заявка №2010129458/28 от 16.07.2010. Опубл. 10.02.2012. Бюл. №4.
6. Патент 2060493, МПК G01N 29/04, Способ ультразвукового контроля головки рельса / Марков А.А., Гурвич А.К., Молотков С.Л., Миронов С.С.
7. Кабардин О.Ф. Физика: Справ. материалы: Учеб. пособие для учащихся. - 3-е изд. - М.: Просвещение, 1991.
8. Алешин Н.П. Методы акустического контроля металлов. М.: Машиностроение, 1989.
9. Кретов Е.Ф. Ультразвуковая дефектоскопия в Энергомашиностроении. Учебное пособие - СПб.: «Радиоавионика», 1995.
10. Клюев В.В., Неразрушающий контроль: Справочник: В 8 т. Ермолов И.Н., Ланге Ю.В. Т. 3. Ультразвуковой контроль. - 2-е изд., испр. - М.: Машиностроение, 2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭХОЛОКАЦИОННЫЙ МЕТОД УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЯ ПО ВСЕМУ СЕЧЕНИЮ | 2010 |
|
RU2442152C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ КОНТРОЛЯ ГОЛОВКИ РЕЛЬСОВ | 2001 |
|
RU2184374C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2021 |
|
RU2777298C1 |
| Способ ультразвукового контроля зоны болтовых стыков рельсов | 2022 |
|
RU2791145C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ ПРОДОЛЬНЫХ ТРЕЩИН В ГОЛОВКЕ РЕЛЬСА | 2019 |
|
RU2712975C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ ОБНАРУЖЕНИЯ ТРЕЩИН В СТЕНКАХ БОЛТОВЫХ ОТВЕРСТИЙ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ, КОНТРОЛЕНЕПРИГОДНЫХ С ПОВЕРХНОСТИ КАТАНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2370391C2 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ГОЛОВКИ РЕЛЬСОВ | 2001 |
|
RU2184960C1 |
| Способ ультразвукового контроля поверхности кварцевых керамических изделий на наличие царапин | 2022 |
|
RU2789244C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА АКУСТИЧЕСКОГО КОНТАКТА ПРИ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ | 2012 |
|
RU2506585C1 |
| Способ ультразвукового контроля изделий качающимся лучом | 1989 |
|
SU1732258A1 |











Использование: для ультразвукового контроля изделия по всему сечению. Сущность: заключается в том, что на поверхность контролируемого изделия устанавливают систему пьезоэлектрических преобразователей, чередующих работу совмещенного и раздельного режимов излучения-приема ультразвуковых колебаний и, перемещая систему пьезоэлектрических преобразователей вдоль продольной оси контролируемого изделия, излучают в него наклонным пьезоэлектрическим преобразователем ультразвуковые колебания и регистрируют эхо-сигналы, отраженные от вертикальных, вертикально ориентированных, горизонтальных и горизонтально ориентированных стандартных и нестандартных отражателей (дефектов), расположенными в проекции плоскости распространения ультразвуковых колебаний в контролируемом изделии одним или множеством прямых пьезоэлектрических преобразователей, при этом излучение ультразвуковых колебаний в контролируемое изделие производится одним пьезоэлектрическим преобразователем с заданным углом ввода ультразвуковых колебаний, а прием эхо-сигналов одним или множеством прямых пьезоэлектрических преобразователей с углом приема эхо-сигналов 0° в одном цикле. Признаком регистрации отражателей в контролируемом изделии является одновременное срабатывание индикатора при превышении порогового уровня амплитуды эхо-сигналов отраженной дифракционно-продольной волны, возбужденных прошедшей преломленной трансформированной дифракционно-продольной волной, отраженной поперечной волны и отраженной трансформированной дифрагированной продольной волны, возбужденных прошедшей преломленной трансформированной поперечной волной, и ослабление амплитуды эхо-сигналов отраженной дифракционно-продольной волны, отраженных от противоположной параллельной поверхности ввода ультразвуковых колебаний и возбужденных прошедшей преломленной трансформированной дифракционно-продольной волной. Технический результат: повышение достоверности и точности контроля. 2 з.п. ф-лы, 20 ил., 1 табл.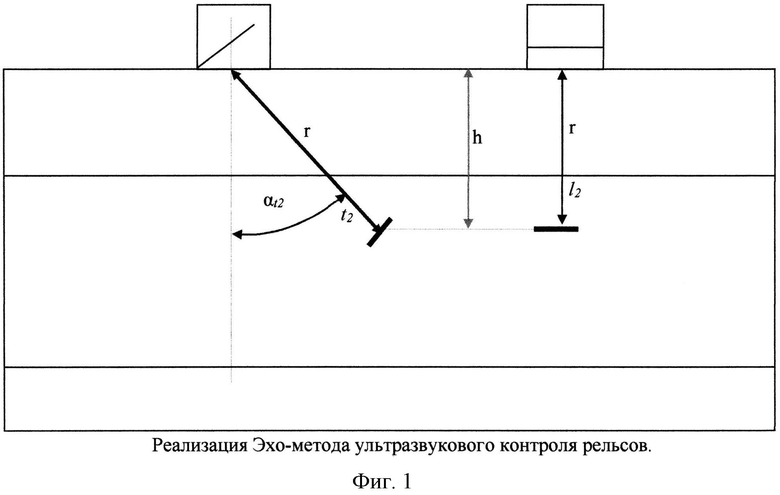
1. Ультразвуковой способ контроля изделия по всему сечению, заключающийся в том, что на поверхность контролируемого изделия устанавливают систему пьезоэлектрических преобразователей, чередующих при необходимости работу совмещенного и раздельного режимов излучения-приема ультразвуковых колебаний по окончании цикла ультразвуковых колебаний, с различными углами ввода ультразвуковых колебаний, для поперечной волны «αt2» от первого критического угла sinβкр1=Cl1/Cl2 до второго критического угла sinβкр2=Cl1/Ct2, рассчитанными по закону Снеллиуса, углом разворота пьезоэлектрической пластины относительно продольной оси контролируемого изделия «γ» от 0° до 90° и углами приема эхо-сигналов «k» 0° и, перемещая систему пьезоэлектрических преобразователей вдоль продольной оси контролируемого изделия, излучают в него наклонным пьезоэлектрическим преобразователем ультразвуковые колебания и регистрируют эхо-сигналы, отраженные от вертикальных, вертикально ориентированных, горизонтальных и горизонтально ориентированных стандартных и нестандартных отражателей (дефектов), расположенными в проекции плоскости распространения ультразвуковых колебаний в контролируемом изделии одним или множеством прямых пьезоэлектрических преобразователей в зависимости от поставленных целей, за исключением «Скрытой зоны» - область контролируемого изделия, неспособная отражать эхо-сигналы в место установки пьезоэлектрических преобразователей, принимающих ультразвуковые колебания, размещенных на поверхности ввода ультразвуковых колебаний относительно наклонного преобразователя, излучающего ультразвуковые колебания вне зависимости от направления его акустической оси на расстоянии «B», рассчитанном из выражения B=htgklk2, где «h» - расстояние от поверхности ввода ультразвуковых колебаний до зоны вероятного отражателя в сечении рельса, «klk2» - угол приема отраженной дифракционно-продольной волны «lk2», «tg» - тангенс угла, отсчитываемый от нормали (перпендикуляра) к поверхности раздела двух сред, проходящей через точку падения и лучом (акустической осью) отраженной дифракционно-продольной волны «lk2», признаком регистрации отражателей в контролируемом изделии является одновременное срабатывание индикатора при превышении порогового уровня амплитуды эхо-сигналов отраженной дифракционно-продольной волны «lk2», возбужденных прошедшей переломленной трансформированной дифракционно-продольной волной «lk2», отраженной поперечной волны «t2» и отраженной трансформированной дифрагированной продольной волны «ld2», возбужденных прошедшей переломленной трансформированной поперечной волной «t2», и ослабление амплитуды эхо-сигналов отраженной дифракционно-продольной волны «lk2», отраженных от противоположной параллельной поверхности ввода ультразвуковых колебаний и возбужденных прошедшей преломленной трансформированной дифракционно-продольной волной «lk2», отличающийся тем, что излучение ультразвуковых колебаний в контролируемое изделие производится одним пьезоэлектрическим преобразователем с углом ввода ультразвуковых колебаний от первого критического угла sinβкр1=Cl1/Cl2 до второго критического угла sinβкр2=Cl1/C12 и углом разворота пьезоэлектрической пластины относительно продольной оси контролируемого изделия «γ» от 0° до 90°, а прием эхо-сигналов - множеством прямых пьезоэлектрических преобразователей с углом приема эхо-сигналов 0° в одном цикле.
2. Ультразвуковой способ контроля изделия по всему сечению по п. 1, отличающийся тем, что прямые пьезоэлектрические преобразователи, работающие в режиме приема ультразвуковых колебаний, принимают эхо-сигналы отраженной дифракционно-продольной волны «lk2», возбужденные прошедшей преломленной трансформированной дифракционно-продольной волной «lk2», образованной наклонным пьезоэлектрическим преобразователем с углом ввода ультразвуковых колебаний от первого критического угла sinβкр1=Cl1/Cl2 до второго критического угла sinβкр2=Cl1/C12.
3. Ультразвуковой способ контроля изделия по всему сечению по п. 1, отличающийся тем, что в прямом пьезоэлектрическом преобразователе пьезоэлектрическая пластина, принимающая ультразвуковые колебания, одновременно регистрирует эхо-сигналы отраженной дифракционно-продольной волны «lk2», возбужденные прошедшей преломленной трансформированной дифракционно-продольной волной lk2, отраженной поперечной волны «t2», возбужденные прошедшей преломленной трансформированной поперечной волной «t2», и отраженной трансформированной дифрагированной продольной волны «ld2», возбужденные прошедшей преломленной трансформированной поперечной волной «t2».
| ЭХОЛОКАЦИОННЫЙ МЕТОД УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЯ ПО ВСЕМУ СЕЧЕНИЮ | 2010 |
|
RU2442152C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ СТЫКОВ РЕЛЬСОВ | 2005 |
|
RU2309402C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СВАРНОГО СТЫКА РЕЛЬСОВ | 2006 |
|
RU2308029C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ПОДОШВЫ РЕЛЬСА | 2007 |
|
RU2353924C1 |
| WO 8203920A1, 11.11.1982 | |||
| US 4174636A, 20.11.1979. | |||

