Изобретение относится к области неразрушающего контроля железнодорожных рельсов ультразвуковыми методами и в частности, может использоваться для обнаружения дефектов в зоне болтовых стыков рельсов.
При проведении сплошного ультразвукового (у.з) контроля рельсов возникают проблемы с выявлением некоторых видов дефектов, расположенных в области первого болтового отверстия болтового стыка и на участке от первого болтового отверстия до соответствующего торца рельса. Наиболее частые дефекты в этих зонах по российской классификации [1]: коды дефектов, распространяющихся от торца рельса 33.1, 55.1 и радиальные трещины от стенки болтового отверстия 53.1. По классификации МСЖД - 132, 232 и 135, по классификации североамериканских железных дорог [2] - HWJ, ВНО и BHJ, соответственно. Далее при обозначении указанных дефектов их классификацию приведем через дробь, например, трещина от болтового отверстия 53.1/135/ BHJ.
Сложность обнаружения указанных дефектов связано с многочисленными отступлениями от норм содержания болтовых стыков. В области первого болтового отверстия в рельсах часто образуются вертикальные и горизонтальные отклонения («ступеньки»), значительно ухудшающие или полностью исключающие акустический контакт искательной у.з. системы с поверхностью катания головки рельса. Ухудшение акустического контакта искательной системы с поверхностью катания головки рельса наблюдается и на участках от первого болтового отверстия до ближайшего торца рельса. Часто наблюдаются расслоения и выкрашивания поверхности катания у торцов рельсов, а также смятие торцов рельсов, экранирующие (затеняющие) распространение у.з. волн в контролируемом рельсе.
Еще одним, немаловажным фактором низкой достоверности обнаружения возможных дефектов в указанных зонах является неполное озвучивание зоны рельса в области первого (от стыка рельса) болтового отверстия из-за недостаточного (короткого) участка на поверхности катания при озвучивании рассматриваемой зоны со стороны торца (см. [3] и [4]) принятыми в рельсовой дефектоскопии схемами прозвучивания с вводом у.з. колебаний под углами от 37,5 до 52,5 градусов [5]. Все это может привести не только к снижению объективности контроля, но и к полному пропуску наиболее опасных дефектов в рельсах, что недопустимо с точки зрения обеспечения безопасности движения на железных дорогах.
Контроль определенных сечений изделий с плоскопараллельными поверхностями, труднодоступных с поверхности сканирования, часто осуществляют с помощью наклонных электроакустических преобразователей (ЭАП), где для выявления дефектов наряду с у.з. колебаниями, озвучиваемыми искомый отражатель прямым (без преображений от поверхности изделия) лучом (при m=0), используют колебания, однократно (m=1) отраженные от противоположной (донной) поверхности [6]. При этом удается полноценно озвучивать контролируемое сечение с положения, когда приемно-излучающий ЭАП находится на определенном расстоянии от искомого сечения (области). Величина этого расстояния зависит от угла а ввода у.з. колебаний и от толщины Η контролируемого изделия. Этот прием широко используется при контроле сварных швов с широкими валиками усиления и, в частности, рельсов [7-10].
Как показано в [11 и 12], в зоне болтовых стыков, и особенно в зоне первого отверстия и торца рельса возникают множественные сигналы, вызванные переотражениями от стенок отверстия, плоскостей торца, поверхности катания и подошвы рельса. Выделение на их фоне сигналов от опасных дефектов является непростой задачей даже для современных систем обработки сигналов контроля [13]. В связи с этим, необходимо решить задачу не только фиксации сигналов от потенциальных дефектов в рассматриваемой зоне, но и выделение их на фоне мешающих отражений.
Известен, например, способ ультразвукового контроля рельсов, в котором излучение ультразвуковых колебаний осуществляют посредством двух наклонных ультразвуковых преобразователей, размещенных на поверхности катания головки рельса симметрично относительно его продольной оси, и перемещаемых вдоль рельса в процессе контроля, при этом излучение осуществляют под углом от 60 до 80 градусов к поверхности катания в стороны боковых граней головки рельса под углом от 10 до 25 градусов относительно продольной оси рельса [14]. Этот способ не позволяет надежно и достоверно выявлять ряд опасных дефектов в рельсах. К ним относятся поперечные трещины под поверхностью катания на продольной оси головки рельса, а также продольные трещины в головке рельса в области болтового стыка и трещины в шейке рельса от болтовых отверстий,
Известен ультразвуковой способ по [15], специально предназначенный для обнаружения трещин в стенках отверстий изделий, в том числе и в зоне болтовых стыков рельсов. Способ предусматривает ввод у.з. колебаний с поверхности катания рельса под двумя разными углами и прием в одном цикле излучения-приема двух эхо-сигналов: от стенки отверстия и от трещины. Однако указанные выше неблагоприятные факторы усложняют ввод у.з. колебаний в зоне первого болтового отверстия и вблизи торца рельса и не обеспечивают требуемую достоверность контроля в искомой зоне.
Наиболее близким к предлагаемому способу и принятым за прототип является способ у.з. контроля рельсов в зоне болтовых стыков по [16], в котором излучают у.з. колебания с поверхности катания под углом к поверхности с возможностью однократного (m=1) переотражения колебаний от подошвы рельса, что позволяет озвучивать зону рельса вблизи первого болтового отверстия при нахождении преобразователя в отдалении («не менее 250 мм») от торца рельса. Тем самым минимизируются влияния рассмотренных выше негативных факторов на качество акустического контакта в около стыковой зоне.
Известное техническое решение [16] обладает низкой достоверностью и надежностью у.з. контроля и имеет ограниченное применение
Задачей, решаемой заявляемым способом, является повышение достоверности у.з. контроля в сложной зоне болтового стыка с одновременным упрощением обработки принимаемых эхо-сигналов и расширением области применения.
Поставленная задача решается тем, что в способе ультразвукового контроля зоны болтовых стыков рельсов, заключающемся в том, что на поверхность катания рельса устанавливают два или более наклонных электроакустических преобразователя, ориентированных вдоль продольной оси рельса симметрично в противоположных направлениях с обеспечением возможности однократного отражения ультразвуковых колебаний от подошвы рельса, в процессе контроля перемещают преобразователи вдоль рельса излучая ультразвуковые колебания, однократно отраженными ультразвуковыми колебаниями в заданных зонах временной селекции принимают эхо-сигналы, измеряют их параметры, по результатам анализа которых судят о наличии дефектов, дополнительно на поверхность катания устанавливают и перемещают совместно с указанными преобразователями электроакустический преобразователь, излучающий ультразвуковые колебания нормально к поверхности катания, принимают и определяют временное положение донного сигнала, отраженного от подошвы рельса, по которому вычисляют текущую высоту рельса, причем, зоны временной селекции наклонных преобразователей для сигналов, принятых однократно отраженным от подошвы колебаниями, определяют с учетом высоты рельса, в этой временной зоне устанавливают повышенную чувствительность контроля, сигналы от радиальных трещин в стенках болтового отверстия выделяют по появлению в одном цикле излучения-приема эхо-сигналов от стенки отверстия и от трещины с временным сдвигом между ними, не превышающим расчетной величины.
В частном случае, при озвучивании однократно отраженными от подошвы рельса ультразвуковыми колебаниями болтового отверстия измеряют амплитуду эхо-сигнала от него, полученное значение используют при определении величины коррекции чувствительности в зоне временной селекции сигналов контроля.
Основными отличиями заявляемого способа по сравнении с прототипом и известным уровнем техники являются:
1. Измерение текущей высоты Η рельса для определения зоны временной селекции сигналов, принятых наклонными преобразователями однократно отраженным от подошвы рельса у.з. колебаниями от возможных отражателей в зоне первого болтового отверстия и вблизи торца рельса. В процессе контроля даже на небольших участках рельсового пути могут быть уложены рельсы разных типов, имеющих, в соответствии с нормативными документами, разные геометрические размеры (например, в России рельсы типа Р43 имеют высоту 149 мм, а типа Р75 - 192 мм, за рубежом - рельсы типа S49, UIC 60 и др. также имею разные геометрические размеры [2]). Очевидно, при этом как зоны перемещения ЭАП по поверхности катания, так и зоны временной селекции ожидаемых эхо-сигналов от искомых дефектов могут быть разными. В прототипе вопросы контроля рельсов разных типов не рассматриваются, что сужает область применения известного способа и, в реальных условиях, может привести как перабраковке, так и к пропуску опасных дефектов.
2. В определенной по измеренной высоте Η рельса временной зоне селекции повышают чувствительность контроля на величину AU по сравнению с чувствительность контроля в зоне озвучивания прямым (до переотражения от подошвы рельса m=0) у.з. лучами. При поиске дефектов однократно отраженным от подошвы рельса у.з. колебаниями, удаленность искомого дефекта от точки ввода у.з колебаний по лучу может составлять до 350 - 400 мм (практически более двойной высота рельса). На таком протяженном (до дефекта и обратно до 700-800 мм) участке у.з. колебания испытывают значительные затухания и рассеяния (особенно в момент отражения от не всегда идеальной поверхности подошвы рельса), что требует повышения чувствительности контроля в анализируемой зоне. В прототипе вопросы корректировки чувствительности в дальней (m=1) зоне контроля не рассматриваются, что может привести к низкой чувствительности и к пропуску дефекта.
3. Сигналы от радиальных трещин, развивающихся от стенок болтового отверстия, распознают по приему в одном цикле излучения - приема двух эхо-импульсов с определенным временным интервалом Δt между ними (парных сигналов), вызванных отражениями от стенки отверстия и от трещины. В прототипе способы распознавания сигналов от дефектов на фоне отражений от стенок отверстий не предложены, что значительно усложняет процесс анализа, требует накопления сигналов в нескольких циклах излучения-приема, снижает производительность и достоверность контроля.
4. Измеряют амплитуду эхо-сигнала от болтового отверстия при озвучивании его однократно отраженными от подошвы рельса у.з. колебаниями и полученное значение используют при определении величины коррекции чувствительности контроля в зоне временной селекции сигналов. В прототипе учет этих факторов не предусмотрен, что снижает чувствительность контроля и достоверность получаемых результатов.
Совокупность отличительных признаков заявляемого способа позволяет получить технический результат: повышение надежности и достоверности у.з. контроля зоны болтовых стыков с одновременным расширением области применения (возможности адаптации к разным типам железнодорожных рельсов с отличающимися геометрическими размерами).
Иллюстративные материалы, поясняющие принцип реализации предлагаемого способа, приведены на:
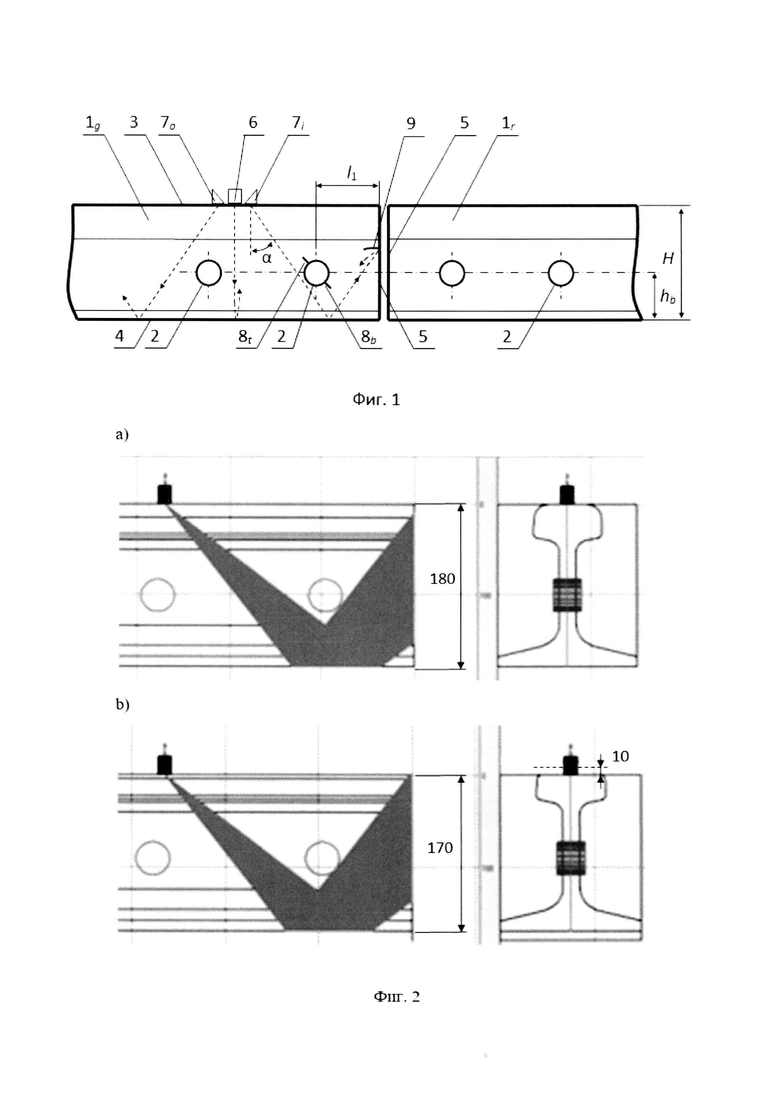
Фиг. 1 - Размещение преобразователей на контролируемом рельсе в зоне болтового стыка, где:
1 - контролируемый рельс: 1 отдающий, 1 - принимающий конец рельса;
2 - болтовые отверстия;
3 - поверхность катания рельса;
4 - подошва рельса;
5 - торец рельса;
6 - прямой ЭАП;
7 - наклонные ЭАП: 7i - наезжающий; 7o - отъезжающий ЭАП;
8 - возможные трещины от стенки болтового отверстия: 8b и 8t развивающиеся в сторону подошвы и вверх в сторону головки рельса, соответственно;
9 - трещина, развивающаяся от торца рельса.
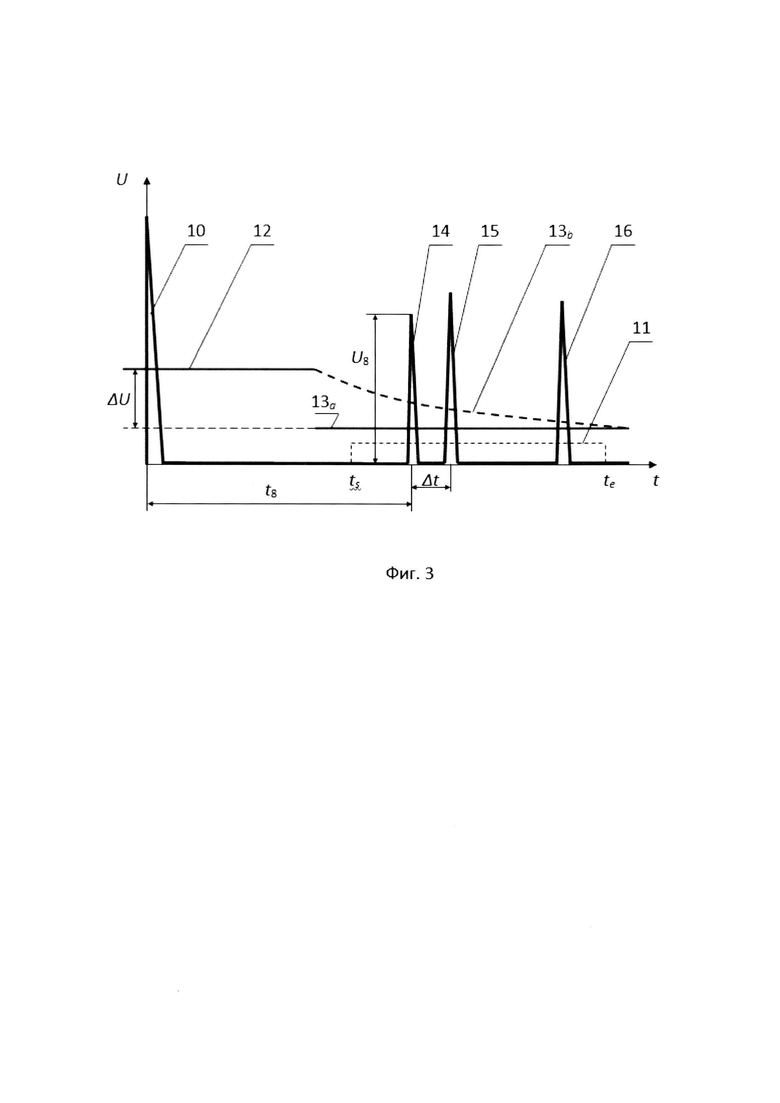
Фиг. 2 - Пример моделирования с помощью специально разработанной программы [12] хода у.з. лучей наклонного ЭАП в процессе озвучивания приторцевой зоны болтового стыка: а) - нового рельса типа Р65 (высота рельса Η -180 мм); b) - рельса с допустимым износом 10 мм (высота рельса Н=170 мм).
Фиг. 3 - Временные положения эхо-сигналов на развертке типа А, где:
10 - зондирующий импульс;
11 - зона временной селекции эхо-сигналов, принятых однократно отраженными (m=1) от подошвы рельса у.з. колебаниями;
12 и 13 - пороговые уровни для зон контроля прямым (m=0) и отраженным (m=1) от подошвы у.з. колебаниями соответственно;
14 - эхо-сигнал от стенки болтового отверстия;
15 - эхо-сигнал от радиальной трещины (код дефекта 53.1/135/BHJ);
16 - эхо-сигнал от продольной трещины, развивающейся от торца рельса (код дефекта 33.1/132/HWJ).
Способ реализуется в следующей последовательности.
Система ЭАП преимущественно (как минимум) из трех отдельных ЭАП (6, 7i и 7o), установленная на мобильное средство дефектоскопии (на фиг.не показано), перемещается по поверхности катания 3 рельса 1 с обеспечением акустического контакта между поверхностью рельса и рабочими поверхностями (протекторами) ЭАП. Преобразователь 6 с нормальным вводом у.з. (угол ввода у.з. колебаний α=0°) периодически излучает у.з. колебания и получает отраженные от поверхности подошвы рельса донные сигналы. По временному положению tb донного сигнала и известной скорости с у.з. колебаний (при использовании в качестве ЭАП пьезопластин - с=5,9 мм/мкс) вычисляется текущая высота Η контролируемого рельса

ЭАП 7i и 7o излучают у.з. колебания под определенным углом а в противоположных по длине рельса 1 направлениях. Т.к. действия ЭАП 7i и 7o идентичны, в дальнейшем рассмотрим подробно формирование сигналов контроля при приближении ЭАП 7i к зоне первого болтового отверстия 2 и к соответствующему торцу 5 рельса (в путевом хозяйстве номера болтовых отверстий отсчитываются от торца рельса) со стороны «отдающего» конца 1g рельса (фиг. 1).
В зависимости от исходных параметров (высоты Η рельса, размещения болтовых отверстий в близи стыка - на фиг. 1 размер  ), угол α выбирается в диапазоне от 37,5 до 52,5 градусов [5].
), угол α выбирается в диапазоне от 37,5 до 52,5 градусов [5].
Как видно из результатов моделирования (фиг. 2), даже при контроле участков пути с однотипными рельсами (Р65), в процессе эксплуатационного износа высота рельса Η может меняться в допустимых пределах (до 10 мм). При этом будут приняты мощные сигналы от уголкового отражателя (фиг. 2b), сформированного плоскостью поверхности катания 3 и торца 5 рельса 1 (см. фиг. 1). Эти сигналы, при существующем уровне техники, могут быть ошибочно восприняты как сигналы от дефекта.
Для однозначного выделения сигналов, сформированных переотраженными у.з. колебаниями от подошвы рельса, с учетом определенной по (1) текущей высоты Η рельса определят границы (начла ts и конца te) зоны τ=(te - ts) временной селекции искомых эхо-сигналов по выражениям:

с - скорость распространения у.з. колебаний в металле рельса (при использовании в качестве ЭАП пьезопластин скорость поперечных у.з. колебаний ct=3,26 мм/мкс);
α0 - угол вода у.з. колебаний в рельс;
ϕ - половина угла раскрытия диаграммы направленности наклонного ЭАП;
h - высота зоны головки рельса, где поверхностные повреждения и расслоения не считаются особо опасными (для рельсов типа Р50, Р65 и Р75 h=8 мм от поверхности катания).
При озвучивании переотраженными (m=1) от донной поверхности у.з колебаниями болтового отверстия снизу, на развертке типа А (фиг. 3) формируется эхо-сигнал 14 на временном расстоянии tb, который по мере перемещения ЭАП несколько смещается в сторону зондирующего импульса:

где R - радиус болтового отверстия;
hb - расстояние центра болтового отверстия от подошвы 4 рельса 1 (фиг. 1).
При этом, на широко применяемом в рельсовой дефектоскопии отображении сигналов на развертке типа В, формируется наклонная [3].
При наличии радиальной трещины (код дефекта 53.1/135/ BHJ по [1 и 2]), развивающейся от стенки болтового отверстия вниз (8b на фиг. 1), практически одновременно формируются два эхо-сигнала (14 и 15 на фиг. 3): от стенки болтового отверстия 2 и от трещины 8b. Причем, сигнал 15 от трещины в основном формируется благодаря уголковому отражателю, образованному стенкой отверстия 2 и плоскостью трещины 8b. Исходя из геометрических соображений можно показать, что временной интервал между двумя эхо-сигналами, не превышает величины Δt:

Отметим, что в любой локации (радио-, акустической-, в том числе гидро- и т.п.), уголковый отражатель является эффективным и формирует значительную амплитуду. В связи с этим амплитуда эхо-сигнала 15 может быть даже больше амплитуды от стенки болтового отверстия 14 (фиг. 3), несмотря на их несопоставимые размеры (отверстие диаметром 36 мм и, например, трещина от 5 мм). Таким образом, появление двойных (парных) эхо-сигналов в определенной временной зоне, удовлетворяющих условию (5), может являться надежным признаком обнаружения радиальной трещины в зоне болтового отверстия.
Этот признак описан нами ранее в техническом решении по [15], однако в известном решении получение пары сигналов с близкими параметрами (амплитудами) достигают путем излучения-приема у.з. колебаний из одной точки на поверхности рельса под двумя наклонными углами. В заявляемом решении такое усложнение конструкции приемно-излучающего ЭАП не требуется, т.к. значительное отдаление отражателей от точки излучения-приема приводит к тому, что даже при озвучивании их ЭАП весьма узкой диаграммой направленности (например, ϕ=4°) обеспечивается одновременный прием сигнала от трещины и от поверхности болтового отверстия. По мере перемещения ЭАП по поверхности рельса на традиционной развертке типа В формируются две параллельные линии с указанным временным интервалом Δt.
Ценное свойство получения пары эхо-сигналов с известными параметрами от отверстия с трещиной позволяет определить наличие трещины даже в процессе одного цикла излучения-приема, что важно при высокоскоростном контроле. В тоже время, наличие этого признака позволяет системе обработки (на фиг. не показана) игнорировать в определенной временной зоне (около tb) одиночные эхо-сигналы (сигналы от стенки бездефектного отверстия), что значительно снижает требования к системе обработки и повышает производительность контроля.
Можно показать, что рассмотренный признак формирования парных эхо-сигналов успешно работает и при озвучивании болтовых отверстий с трещиной 8t, развивающейся вверх (в сторону головки рельса - фиг. 1). Причем в любом случае, первым, по временному положению относительно зондирующего импульса, является сигнал 14 от стенки отверстия, а вторым, на расстоянии Δt, сигнал от уголкового отражателя 15, образованного стенкой отверстия и плоскостью трещины.
Отражения 16 (фиг. 3) от возможных трещин 9 вблизи торца рельса (коды дефектов 33.1/232/ HWJ и 55.1/135/ВНО по [1 и 2]) отличаются от рассмотренного механизма формирования сигналов в зоне болтового отверстия, тем, что:
- во-первых, их временное положение находится дальше от зондирующего импульса 10, чем сигналы от болтового отверстия 14 (фиг. 3);
во-вторых, несмотря на то, что здесь также отражения в основном формируются благодаря образованию уголкового отражателя (между плоскость трещины 9 и стенкой торца 5 рельса - фиг. 1), в процессе сканирования формируется одиночный эхо-сигнал 16 (фиг. 3).
Используя рассмотренные выше признаки сигналов, блок обработки (на фиг.не показан) может дифференцировать разные отражатели, что повышает достоверность контроля и весьма важно для своевременного принятия решения по техническому обслуживанию рельсового пути.
Формирование временной зоны селекции 11 (фиг. 3) в соответствии с выражениями (2) и (3) с учетом текущей высоты рельса Η контролируемого рельса, позволяет не только адаптировать и определять требуемую зону корректировки (повышения) чувствительности контроля, но и позволяет исключить из обработки сигналы от отражателей, не являющихся сигналами от искомых дефектов. В частности, ограничение зоны селекции временным значением te позволяет исключить из рассмотрения возможные отражения от верхнего угла торца рельса (см. фиг. 2b) и сигналы от микротрещин поверхности катания и подповерхностном слое h, не представляющих угрозу движения поездов. Например, для рельсов типа Р50, Р65 и Р75 высота h - зоны головки рельса, где поверхностные повреждения и расслоения не считаются особо опасными h=8 мм (от поверхности катания) [1]. Тем самым повышается скорость обработки сигналов и снижается вероятность ложной тревоги, что способствует повышению достоверности и производительности контроля.
Расчет необходимой величины ΔU повышения чувствительности контроля (или снижение порогового уровня, как показано на фиг. 3) в дальней зоне (при m=1) производят известным способом [6]. Причем корректировка чувствительности в этой зоне может быть на постоянную величину ΔU в пределах всей зоны (см. 13а на фиг. 3) или, в общем случае, криволинейной 13b - по закону затухания у.з колебаний в зависимости от пути распространения.
При расчете величины ΔU не всегда корректно можно задать реальные исходные данные, входящие в расчетное выражение [6]. В частности, коэффициент двойного прохождения у.з колебаний в зоне сканирования ЭАП на поверхности катания 3 рельса 1 и отражающую способность у.з. колебаний донной поверхности 4 (фиг. 1). Концевые части рельсов в зоне болтовых стыков подвергаются значительным динамическим воздействиям колес подвижного состава, в результате создаются условия попадания атмосферных осадков между подошвой рельса и подкладкой рельсовых скреплений. Коррозионные повреждения подошвы 4 снижают отражающую способность внутренней поверхности подошвы рельса, а значит, и амплитуды сигналов от искомых дефектов при обнаружении их однократно отраженными от подошвы у.з колебаниями.
Для устранения этого недостатка в заявляемом способе предлагается использовать амплитуду Ub отраженного при т - 1 у.з. колебаний от стенки первого болтового отверстия в качестве опорного уровня, позволяющего более корректно определить величину приращения ΔU чувствительности контроля (фиг. 3). Причем выделение сигнала 14 от стенки болтового отверстия при озвучивании его однократно отраженным лучом можно выполнить достаточно просто. В зоне временной секции 11 этот сигнал появляется первым от зондирующего импульса 10 на расчетной координате, определяемой из геометрических соображений по выражению (4) при известных: высоты Η рельса, радиуса R, положения hb центра отверстия и угла а ввода у.з. колебаний (фиг. 1 и 3).
При изменении параметров сигнала 14 от стенки болтового отверстия (фиг. 3) блок обработки дефектоскопа измеряет его текущую амплитуду Ub и синхронно изменяет величину ΔU, обеспечивая тем самым автоматическую коррекцию с учетом всех сопутствующих факторов, влияющих на прохождение и отражение от подошвы рельса у.з колебаний.
Размещение ЭАП 6 и 7 относительно друг друга можно осуществлять преимущественно так, как показано на фиг. 1. В общем случае размещение может быть и иным, т.к. в соответствии с известным техническим решением [17] возможно, при заданных углах ввода и расстояний между отдельными ЭАП, программно-аппаратным способом привести принимаемые эхо-сигналы к «единому сечению».
Выше рассмотрен процесс озвучивания первого болтового отверстия 2 со стороны «отдающего» конца 1g рельса (фиг. 1). При переходе в процессе перемещения искательной системы на «принимающий» конец рельса 1 г, наклонный ЭАП 7о, отраженными от подошвы 4 рельса у.з. колебаниями, аналогично озвучивает первое отверстие 2 рельса 1r (фиг. 1). Формирование сигналов контроля зоны торца 5 рельса и первого отверстия 2 при этом происходит полностью идентично работе ЭАП 7i.
В общем случае, определение текущей высоты Η рельса можно выполнить и другими известными способами (например, по [18]). Однако, использование ЭАП с нормальным вводом у.з. колебаний для данного способа является наиболее экономичным и естественным, упрощая последующую обработку сигналов.
В качестве ЭАП могут преимущественно использоваться у.з преобразователи на базе пьезоэлектрических пластин (ПЭП) или, для бесконтактного контроля, возбуждение и прием у.з колебаний на базе электромагнитно акустического (ЭМА) возбуждения. В последнем случае, несмотря на декларируемую бес контактность, индукторы ЭМА - преобразователи (ЭМАП), должны быть максимально приближены к поверхности катания рельса, и все негативные факторы в концевой зоне болтового стыка, также будут оказывать на них дестабилизирующие воздействия. Поэтому для надежного контроля концевой зоны болтового стыка (в районе первого болтового отверстия и вблизи торца) и с помощью ЭМАП ввод и прием у.з. колебаний, в соответствии с заявляемым способом, необходимо проводить в некотором отдалении от торца рельса. Величина отдаления и параметры контроля (чувствительность и зоны селекции эхо-сигналов), как и при использовании ПЭП, в соответствии с рассмотренными выше предложениями, зависят от геометрических размеров контролируемого рельса.
В общем случае при реализации способа вместо одиночных ЭАП (6 и 7 на фиг. 1) возможно использование сдвоенных или состоящих из нескольких элементов комбинированных ЭАП по аналогии, например, способом [19], применяемых для реализации высокоскоростного контроля.
Специалистам в области дефектоскопии очевидно, что предложенные выше операции способа (вычисление высоты рельса по времени пробега у.з. колебаний, расчет границ зоны временной селекции для сигналов, принятых при m=1, выделение парных эхо-сигналов с определенным временным интервалом между ними, измерение амплитуды эхо-сигнала от стенки болтового отверстия и корректировка чувствительности контроля в зоне временной селекции с учетом этой амплитуды) реализуемы современными вычислительными средствами, в том числе и встроенными в дефектоскоп микропроцессорными системами обработки.
Таким образом, предлагаемый способ реализуем, а введение оптимизированной, с учетом геометрических размеров рельса, зоны временной селекции, выбор соответствующей чувствительности контроля и введение дополнительных признаков для сигналов от опасных дефектов упрощает обработку сигналов и повышает достоверность обнаружения дефектов с одновременным повышением производительности контроля. При этом достигается поставленный технический результат: повышение надежности и достоверности у.з. контроля зоны болтовых стыков с одновременным расширением области применения.
Источники
1. Инструкция "Дефекты рельсов. Классификация, каталог и параметры дефектных и остродефектных рельсов". ОАО "РЖД" №2499р от 23.10.2014.
2. Шур Е.А. Повреждения рельсов. М.: Интекст, 2012, - 192 с.
3. Марков Α.Α., Кузнецова Е.А. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 2. Расшифровка дефектограмм. СПб.: Ультра Принт, 2014. 332 с.
4. Марков Α.Α., Кузнецова Е.А. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 1. Основы. СПб.: КультИнформПресс, 2010. 292 с.
5. US 8365604.
6. Гурвич А.К., Кузьмина Л.И. Справочные диаграммы направленности искателей ультразвуковых дефектоскопов. Киев, Техника, 1980.
7. RU 1325350.
8. RU 2184374.
9. RU 2309402.
10. RU 2545493.
11. Марков А.А., Захарова О.Ф., Мосягин В.В. Применение развертки типа «В» для обнаружения трещин в зоне отверстий болтовых стыков железнодорожных рельсов // Дефектоскопия. 1999. №6. С. 78-92.
12. Markov А.А., Mosyagin V.V., Keskinov M.V. A PROGRAM FOR 3D SIMULATION OF SIGNALS FOR ULTRASONIC TESTING OF SPECIMENS //Russian Journal of Nondestructive Testing. 2005. T. 41. №12. C. 778-789.
13. Чепрасов Д.Н., Маленичев A.A., Сулимова B.B., и др. ВОССТАНОВЛЕНИЕ ПРОПУЩЕННЫХ ДАННЫХ НА УЛЬТРАЗВУКОВЫХ ДЕФЕКТО-ГРАММАХ РЕЛЬСОВОГО ПУТИ НА ОСНОВЕ ЛОКАЛЬНО-ГЛОБАЛЬНОГО ВЫРАВНИВАНИЯ // В книге: Математические методы распознавания образов, тезисы докладов 17-й Всероссийской конференции с международным участием. Москва, 2015. С. 200-201.
14. US 4700754.
15. RU 2052808.
16. RU 2777298.
17. RU 2227911.
18. US 10168304.
19. RU 2715885.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОКАНАЛЬНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2023 |
|
RU2809185C1 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ КОНТРОЛЯ ГОЛОВКИ РЕЛЬСОВ | 2001 |
|
RU2184374C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ГОЛОВКИ РЕЛЬСОВ | 2001 |
|
RU2184960C1 |
| СПОСОБ НАСТРОЙКИ ЧУВСТВИТЕЛЬНОСТИ РЕЛЬСОВОГО УЛЬТРАЗВУКОВОГО ДЕФЕКТОСКОПА | 2015 |
|
RU2603332C1 |
| Способ ультразвукового контроля подошвы рельсов | 2016 |
|
RU2645818C1 |
| Ультразвуковой способ обнаружения и оценки сварных стыков рельсов при высокоскоростном контроле | 2021 |
|
RU2764571C1 |
| Способ оценки работоспособности дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2753810C1 |
| Способ высокоскоростной ультразвуковой дефектоскопии длинномерных объектов | 2021 |
|
RU2756933C1 |
| Способ ультразвукового контроля локальных участков железнодорожных рельсов | 2023 |
|
RU2818035C1 |
| Способ ультразвукового контроля локальных участков рельсов | 2023 |
|
RU2823665C1 |
Использование: для ультразвукового контроля зоны болтовых стыков рельсов. Сущность изобретения заключается в том, что на поверхность катания рельса устанавливают два или более наклонных электроакустических преобразователя, ориентированных вдоль продольной оси рельса в противоположных направлениях с обеспечением возможности отражения ультразвуковых колебаний от подошвы рельса, в процессе контроля преобразователи перемещают вдоль рельса излучая ультразвуковые колебания, в заданных зонах временной селекции принимают отраженными от подошвы рельса ультразвуковыми колебаниями эхо-сигналы, измеряют параметры эхо-сигналов, по результатам анализа которых судят о наличии дефектов, при этом на поверхность катания устанавливают и перемещают совместно с наклонными преобразователями дополнительный электроакустический преобразователь, излучающий ультразвуковые колебания нормально к поверхности катания, принимают и определяют временное положение донного сигнала, отраженного от подошвы рельса, по которому вычисляют текущую высоту рельса, зону временной селекции наклонных преобразователей для сигналов, принятых отраженными от подошвы ультразвуковыми колебаниями, определяют с учетом высоты рельса, в этой временной зоне устанавливают повышенную чувствительность контроля, сигналы от радиальных трещин в стенках болтового отверстия выделяют по появлению в одном цикле излучения-приема эхо-сигналов от стенки отверстия и от трещины с временным сдвигом между ними, не превышающим расчетной величины. Технический результат: повышение надёжности и достоверности ультразвукового контроля зоны болтовых стыков с одновременной возможностью адаптации к разным типам железнодорожных рельсов с отличающимися геометрическими размерами. 1 з.п. ф-лы, 3 ил.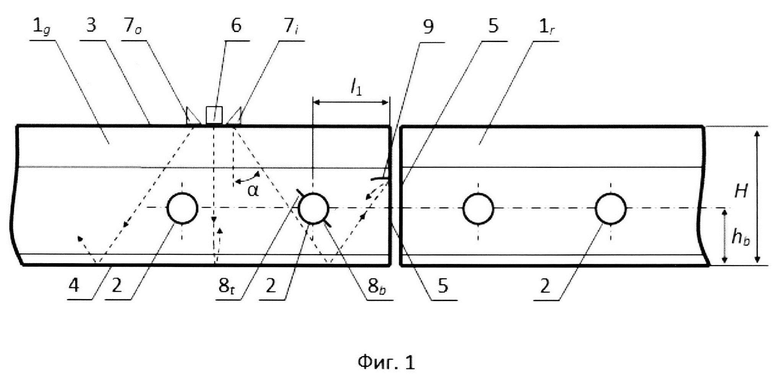
1. Способ ультразвукового контроля зоны болтовых стыков рельсов, заключающийся в том, что на поверхность катания рельса устанавливают два или более наклонных электроакустических преобразователя, ориентированных вдоль продольной оси рельса в противоположных направлениях с обеспечением возможности отражения ультразвуковых колебаний от подошвы рельса, в процессе контроля преобразователи перемещают вдоль рельса излучая ультразвуковые колебания, в заданных зонах временной селекции принимают отраженными от подошвы рельса ультразвуковыми колебаниями эхо-сигналы, измеряют параметры эхо-сигналов, по результатам анализа которых судят о наличии дефектов, отличающийся тем, что на поверхность катания устанавливают и перемещают совместно с наклонными преобразователями дополнительный электроакустический преобразователь, излучающий ультразвуковые колебания нормально к поверхности катания, принимают и определяют временное положение донного сигнала, отраженного от подошвы рельса, по которому вычисляют текущую высоту рельса, зону временной селекции наклонных преобразователей для сигналов, принятых отраженными от подошвы ультразвуковыми колебаниями, определяют с учетом высоты рельса, в этой временной зоне устанавливают повышенную чувствительность контроля, сигналы от радиальных трещин в стенках болтового отверстия выделяют по появлению в одном цикле излучения-приема эхо-сигналов от стенки отверстия и от трещины с временным сдвигом между ними, не превышающим расчетной величины.
2. Способ ультразвукового контроля зоны болтовых стыков рельсов по п. 1, отличающийся тем, что при озвучивании отраженными от подошвы рельса ультразвуковыми колебаниями болтового отверстия измеряют амплитуду эхо-сигнала от него и используют ее при определении величины коррекции чувствительности в зоне временной селекции наклонных преобразователей.
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2021 |
|
RU2777298C1 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2013 |
|
RU2521095C1 |
| СПОСОБ МНОГОКАНАЛЬНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2002 |
|
RU2227911C1 |
| СПОСОБ КОНТРОЛЯ БЕССТЫКОВОГО ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2017 |
|
RU2656777C2 |
| US 2013158985 A1, 20.06.2013 | |||
| US 2012218868 A1, 30.08.2012. | |||

