Изобретение относится к устройствам железнодорожной автоматики и телемеханики и может быть использовано на железнодорожном транспорте для обнаружения железнодорожного подвижного состава при приближении его к месту проведения работ или пассажирской платформе и в аппаратуре железнодорожной автоматики.
Известно устройство обнаружения подвижного состава, содержащее пьезоэлектрический датчик, дифференциальный усилитель низких частот, амплитудный детектор с RC-цепью на выходе, цепь временной задержки, инвертор, транзистор, эмиттер которого заземлен, причем первый выход датчика соединен с входом амплитудного детектора с RC-цепью на выходе, выход амплитудного детектора связан через последовательно включенные цепь временной задержки и инвертор с базовой цепью транзистора, коллектор которого подключен ко второму выходу датчика (RU 2071429 C1, B61L 23/06, 10.01.1997).
В известном устройстве пьезоэлектрический датчик улавливает акустические сигналы в рельсах, создаваемые движущимся составом, и передает их на выход в элементы оповещения, при этом он отслеживает движение состава, что позволяет исключить появление ложных сигналов оповещения.
Известен рельсовый модуль для обнаружения подвижного состава, содержащий последовательно соединенные электромагнитный датчик, дифференциальный усилитель, полосовой фильтр и детектор, один из выходов которого подключен к одному из входов микропроцессора, а другой выход подключен через последовательно соединенные таймер и компаратор к другому входу микропроцессора, при этом рельсовый модуль снабжен собственным источником питания (описание RU 121218 U1, B61L 23/06, 03.07.2012).
Известные устройства воспроизводят сигнал обнаружения подвижного состава только при его появлении в зоне контроля, в результате чего функционирование устройства обнаружения поезда при отсутствии подвижного состава не контролируется, что может привести при их отказе к опасной ситуации.
Технический результат предлагаемого изобретения заключается в повышении достоверности обнаружения подвижного состава за счет постоянного контроля функционирования устройства обнаружения, а также в расширении функциональных возможностей за счет определения направления и скорости движения подвижного состава.
Технический результат достигается тем, что устройство обнаружения подвижного состава и определения направления и скорости его движения содержит установленные на одной стороне железнодорожного полотна на заданных расстояниях друг от друга и от ближайшего пути на уровне сцепки вагонов подвижного состава два источника направленного оптического или инфракрасного излучения с модуляторами света и формирователь контрольных сигналов, выходом подключенный к входам модуляторов света, а на другой стороне железнодорожного полотна два приемника излучения, каждый из которых оптически связан с соответствующим источником излучения, два дешифратора, формирователь сигнала обнаружения подвижного состава, блок определения направления и скорости движения подвижного состав, последовательно соединенные блок сопряжения и передатчик, при этом приемники излучения, дешифраторы, формирователь сигнала обнаружения поезда, блок определения направления движения и скорости подвижного объекта, блок сопряжения и передатчик установлены в едином корпусе, одна сторона которого выполнена прозрачной для излучения оптического или инфракрасного диапазона, напротив нее размещены приемники излучения, между ними установлен непрозрачный для оптического и инфракрасного излучения экран, выход одного из приемников излучения подключен к входу первого дешифратора, а выход другого приемника излучения - к входу второго дешифратора, выходы дешифраторов соединены с входами формирователя сигналов обнаружения подвижного состава и блока определения направления и скорости движения подвижного состава, выходы которых подключены к входам блока сопряжения.
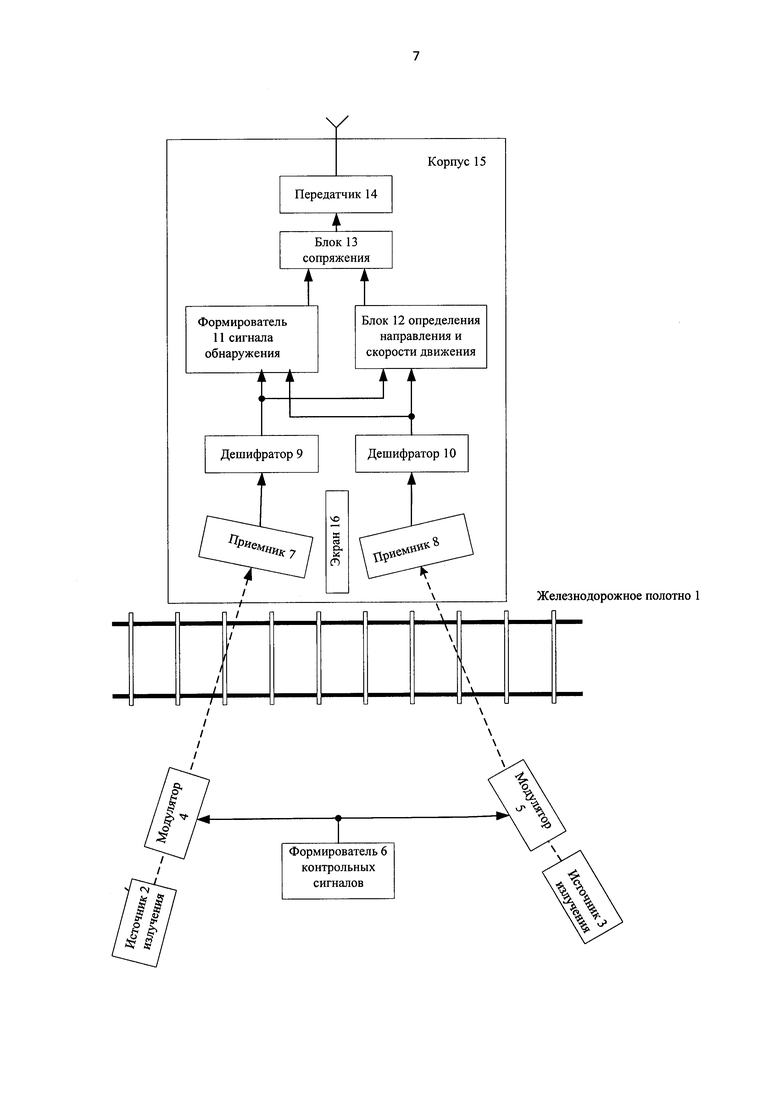
Сущность изобретения поясняется чертежом, на котором представлена структурная схема одного из вариантов предлагаемого устройства обнаружения подвижного состава и определения направления и скорости его движения.
Устройство обнаружения подвижного состава и определения направления и скорости его движения содержит установленные на одной стороне железнодорожного полотна 1 на заданных расстояниях друг от друга и от ближайшего пути, например, на расстоянии 5 м друг от друга и 0,5 м от ближайшего пути, на уровне сцепки вагонов подвижного состава два источника 2 и 3 направленного оптического или инфракрасного излучения с модуляторами 4 и 5 света и формирователь 6 контрольных сигналов, выходом подключенный к входам модуляторов 4 и 5, а на другой стороне железнодорожного полотна 1 - два приемника 7 и 8 излучения, каждый из которых оптически связан с соответствующим источником 2 и 3 излучения, два дешифратора 9 и 10, формирователь 11 сигнала обнаружения подвижного состава, блок 12 определения направления и скорости движения подвижного состава, последовательно соединенные блок 13 сопряжения и передатчик 14.
При этом приемники 7 и 8 излучения, дешифраторы 9 и 10, формирователь 11 сигнала обнаружения поезда, блок 12 определения направления и скорости движения подвижного объекта, блок 13 сопряжения и передатчик 14 установлены в едином корпусе 15. Одна сторона корпуса 15 выполнена прозрачной для излучения оптического или инфракрасного диапазона, напротив нее размещены приемники 7 и 8 излучения. Между приемниками 7 и 8 установлен экран 16, непрозрачный для оптического и инфракрасного излучения. Корпус 15 установлен на уровне сцепки вагонов подвижного состава. Выход приемника 7 излучения подключен к входу первого дешифратора 9, а выход приемника 8 излучения - к входу второго дешифратора 10. Выходы дешифраторов 9 и 10 соединены с входами формирователя 11 сигналов обнаружения поезда и блока 12 определения направления и скорости движения подвижного состава, выходы которых подключены к входу блока 13 сопряжения.
Блоки питания элементов устройства не представлены на чертеже.
Устройство обнаружения подвижного состава и определения направления и скорости его движения функционирует следующим образом.
На входы модуляторов 4 и 5 света формирователь 6 подает контрольные сигналы. Сигналы от источников 2 и 3 излучения моделируются одними и теми же сигналами. Благодаря чему на приемники 7 и 8, установленные на другой стороне железнодорожного полотна, поступают оптические сигналы, передающие идентичную информацию.
При отсутствии подвижного состава приемники 7 и 8 преобразуют направленное излучение в электрические сигналы и передают их на входы дешифраторов 9 и 10. Дешифраторы 9 и 10 осуществляют соответствующую обработку полученных сигналов, результаты обработки передают на входы формирователя 11 сигнала обнаружения подвижного состава и блока 12 определения направления и скорости движения подвижного состава.
Формирователь 11 сравнивает поступившие на его входы сигналы и в случае их совпадения формирует на своем выходе сигнал отсутствия подвижного состава.
Блок 12 определения направления и скорости движения подвижного состава также сравнивает поступившие на его входы сигналы и в случае их совпадения формирует на своих выходах нулевой сигнал.
Информационные сигналы от формирователя 11 и блока 12 поступают на вход блока 13, который формирует информационное сообщение об отсутствии подвижного состава на путях железнодорожного полотна для последующей передачи его передатчику 14. По радиоканалу информационное сообщение об отсутствии подвижного состава передатчик 14 передает, например, в систему оповещения работающих на перегоне, систему оповещения пассажиров на станции или в систему железнодорожной автоматики и телемеханики.
При прохождении подвижного состава в зоне размещения источников 2 и 3 излучения в зависимости от направления его движения им перекрывается сначала излучение одного из источников 2 или 3, а затем - излучение от другого источника 3 или 2. Такое прекращение поступления сигналов от источников 3 и 2 приводит к отсутствию сигнала на выходе сначала одного дешифратора 9 или 10, а затем и второго дешифратора 10 или 9. В этом случае формирователь 11 выдает на своем выходе сигнал обнаружения подвижного состава, а блок 12 фиксирует время t1 и t2 прекращения сигнала на выходе каждого дешифратора 9 и 10.
В зависимости от того, на выходе какого дешифратора 9 или 10 раньше зафиксировано отсутствие сигнала, блок 12 определяет направление движения подвижного состав. Кроме того, блок 12 рассчитывает скорость подвижного состава по формуле: V=L/(t1-t2), где L - величина, характеризующая расстояние между точками пересечения вагонов подвижного состава и направленными излучениями источников 2 и 3, которая предварительно рассчитывается и хранится в памяти блока 12. Информационные сигналы о направлении и скорости движения подвижного состава блок 12 передает в блок 13 сопряжения.
Блок 13 формирует информационное сообщение об обнаружении подвижного состава, направлении и скорости его движения для его последующей передачи на вход передатчика 14, который осуществляет транслирование информационного сообщения заинтересованным системам оповещения или системе железнодорожной автоматики и телемеханики.
В случае несовпадения сигналов с выхода дешифраторов 9 и 10 или при отказе любого из элементов устройства, вызвавшего прекращение поступления сигналов на вход дешифраторов 9 и 10, блок 11 выдает информационный сигнал об обнаружении подвижного состава и передает его в блок 13. При отсутствии при этом информации о направлении движения и скорости подвижного состава с выходов блока 12 блок 13 формирует информационное сообщение об отказе устройства и передает его на вход передатчика 14, который осуществляет транслирование информационного сообщения заинтересованным системам оповещения или системе железнодорожной автоматики и телемеханики.
Таким образом, за счет постоянного контроля функционирования устройства обнаружения предлагаемое изобретение позволяет повысить достоверность обнаружения подвижного состава, а за счет определения направления и скорости движения подвижного состава позволяет расширить функциональные возможности устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2015 |
|
RU2583011C1 |
| Способ оповещения работающих на перегоне о приближении железнодорожного подвижного состава с ограждением места работ | 2022 |
|
RU2780241C1 |
| УСТРОЙСТВО ОПОВЕЩЕНИЯ РЕМОНТНЫХ БРИГАД | 2003 |
|
RU2268836C2 |
| Робот-сигналист и система ограждения места работ и оповещения работающих на перегоне при капитальном ремонте пути | 2022 |
|
RU2791772C1 |
| Автоматизированная система ограждения места работ по текущему содержанию железнодорожного пути с оповещением работающих о приближении подвижного состава без использования сигналистов (СОРБИС-М1) | 2020 |
|
RU2733452C1 |
| Система оповещения работающих на перегоне о приближении подвижного состава с ограждением места проведения работ | 2019 |
|
RU2725327C1 |
| Система контроля дефектов колёсных пар подвижного железнодорожного состава | 2023 |
|
RU2818020C1 |
| Устройство автоматической сигнализации о приближении поезда к участку путевых работ | 1987 |
|
SU1539111A1 |
| Устройство оповещения о приближении подвижного состава | 1989 |
|
SU1636283A1 |
| Способ ограждения места проведения работ и оповещения работающих на железнодорожных путях | 2017 |
|
RU2655566C1 |
Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте. Устройство содержит два источника направленного оптического или инфракрасного излучения с модуляторами света и формирователь контрольных сигналов, два приемника излучения, два дешифратора, формирователь сигнала обнаружения подвижного состава, блок определения направления и скорости движения подвижного состава, блок сопряжения и передатчик. Причем приемники излучения, дешифраторы, формирователь сигнала обнаружения поезда, блок определения направления движения и скорости подвижного объекта, блок сопряжения и передатчик установлены в едином корпусе, одна сторона которого выполнена прозрачной для излучения оптического или инфракрасного диапазона, напротив нее размещены приемники излучения а между ними установлен непрозрачный для оптического и инфракрасного излучения экран. Достигается повышение надежности достоверного обнаружения подвижного состава. 1 ил.
Устройство обнаружения подвижного состава, содержащее установленные на одной стороне железнодорожного полотна на заданных расстояниях друг от друга и от ближайшего пути на уровне сцепки вагонов подвижного состава два источника направленного оптического или инфракрасного излучения с модуляторами света и формирователь контрольных сигналов, выходом подключенный к входам модуляторов света, а на другой стороне железнодорожного полотна два приемника излучения, каждый из которых оптически связан с соответствующим источником излучения, два дешифратора, формирователь сигнала обнаружения подвижного состава, блок определения направления и скорости движения подвижного состава, последовательно соединенные блок сопряжения и передатчик, при этом приемники излучения, дешифраторы, формирователь сигнала обнаружения поезда, блок определения направления движения и скорости подвижного объекта, блок сопряжения и передатчик установлены в едином корпусе, одна сторона которого выполнена прозрачной для излучения оптического или инфракрасного диапазона, напротив нее размещены приемники излучения, между ними установлен непрозрачный для оптического и инфракрасного излучения экран, выход одного из приемников излучения подключен к входу первого дешифратора, а выход другого приемника излучения - к входу второго дешифратора, выходы дешифраторов соединены с входами формирователя сигналов обнаружения подвижного состава и блока определения направления и скорости движения подвижного состава, выходы которых подключены к входам блока сопряжения.
| Устройство автоматической сигнализации о приближении поезда к участку путевых работ | 1987 |
|
SU1539111A1 |
| Способ уменьшения пускового момента поршневых компрессоров | 1958 |
|
SU121218A1 |
| RU 2013116979 A, 27.10.2014 | |||
| WO 1994021504 A1, 29.09.1994. | |||

