Изобретение относится к транспорту и может быть использовано для дизель-электрического привода переменно-переменного тока, в частности, большегрузных автосамосвалов
Цель изобретения - повышение надежности,,
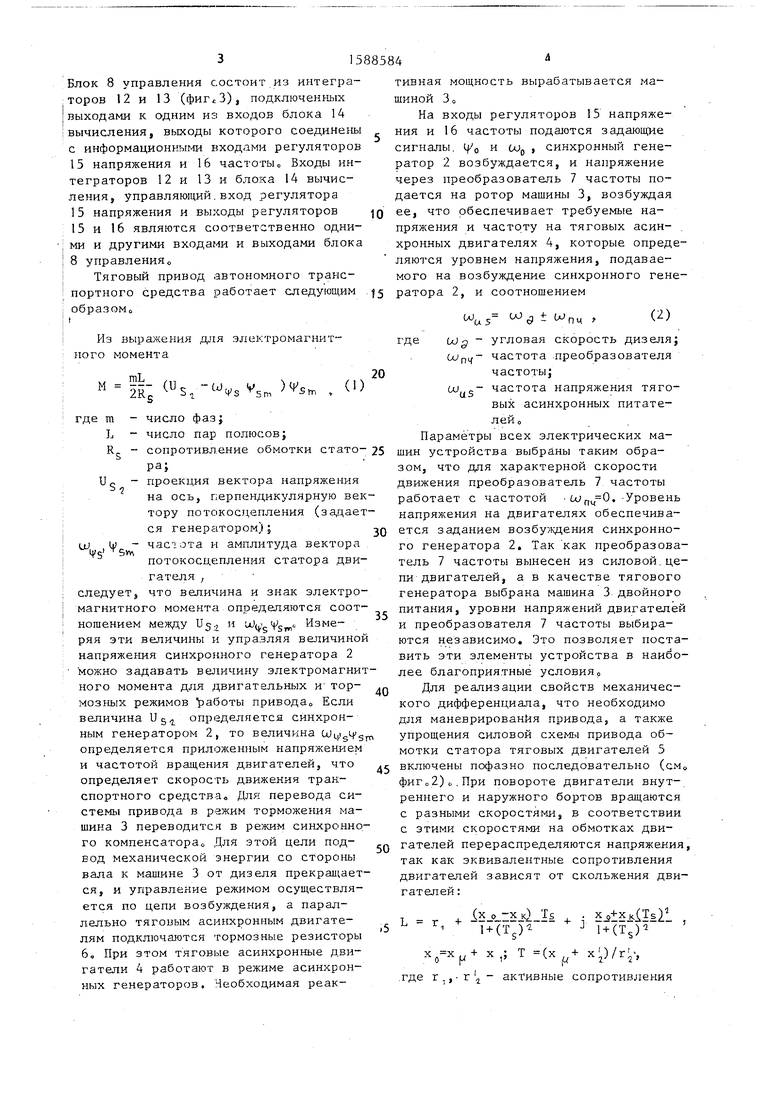
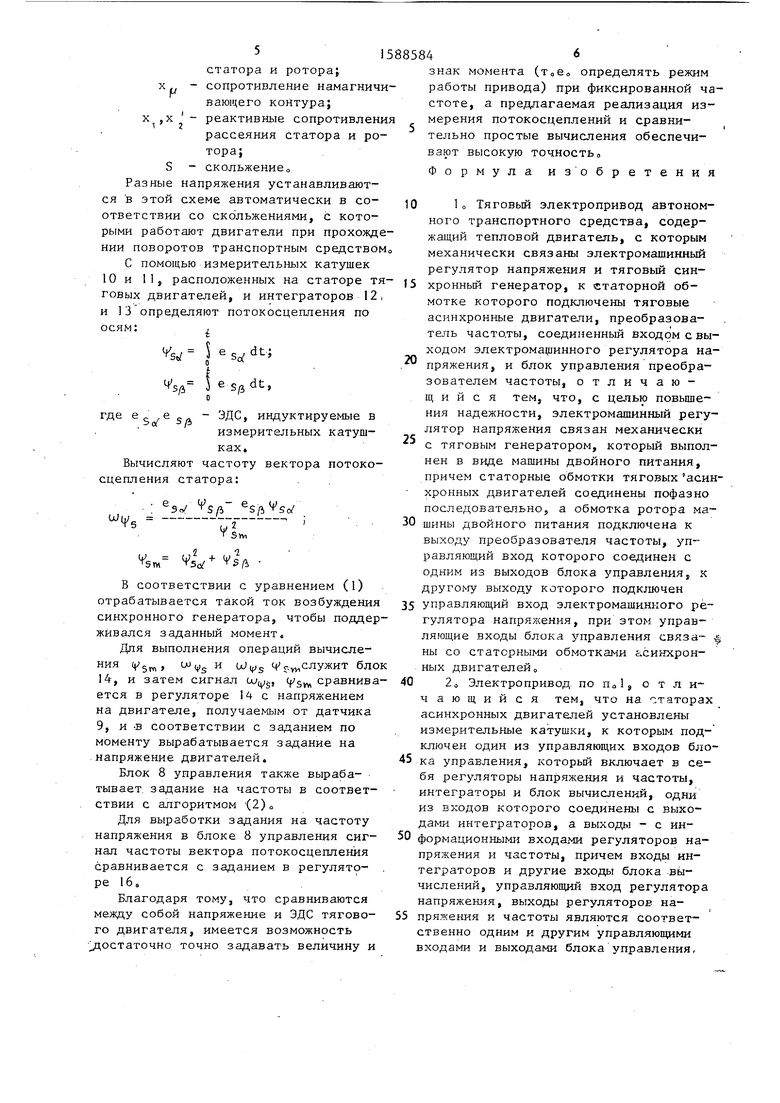
На фиг.I представлена структурная схема тягового электропривода автономного транспортного средства; на фиг о 2 - схема включения статорных обмоток тяговых асинхронных двигателей; на фиГоЗ структурная схема блока управления преобразователем частоты
Тяговый электропривод автономного транспортного средства содержит механически связанные между собой тепловой двигатель (фиг), синхроиньм генератор 2 и машину 3 двойного питания, к статорной обмотке которой подключены тяговые асинхронные двигатели 4 и через контакт 5 тормозного контактора - тормозной резистор 6, а к обмотке ротора - выход преобразователя 7 частоты, соединенного силовым входом со статорной обмоткой синхронного генератора 2, а управляющим входом с одним из выходов блока 8 управления преобразователем 1 частоты. К другому выходу блока 8 управления подюдачена обмотка возбуждения синхронного генераторао Входы блока 8 управления (фиг«3) соединены с выходам датчика 9 напряжения и измерительных катушек 10 и 11, расположенных на статорах тяговых асинхронных двигателей, обмотки которых соединены пофазно последовательно (фиг,2).
00 D1 00
СД
Блок 8 управления состоит из интегра- ;торов 12 и 13 (фигсЗ), подключенных I выходами к одним иг: входов блока 14 вычисления, выходы которого соединены с информационныг-ш входами регуляторов 15 напряжения и 16 частоты Входы интеграторов 12 и 13 и блока 14 вычисления, управляющий.вход регулятора 15 напряжения и выходы регуляторов 15 и 16 являются соответственно одни- : ми и другими входами и выходами блока : 8 управления
: Тяговый привод автономного транс- портного средства )работает следующим
: образомо
: t
: Из выражения для электромагнитного момента
- П1 2Ке S,
V,,
)СИ
Sm
(1)
где m L
s
Uc
число фаз j
число пар полюсов;
си с частота напряжения тяго вых асинхронных питателейПараметры всех электрических ма- сопротивление обмотки стато- 25 шин устройства выбрйны таким обра35
ра;
- проекция вектора напряжения на ось, перпендикулярную вектору потокос.цепления (за,цает- ся генератором)
ш ы - часюта и амплитуда вектора
Ulc SW
потокосдЕ .пления статора двигателя ,
следует, что величина и знак электромагнитного момента определяются соотношением между и5:) и ijL t ig Измеряя эти величины и управляя величиной напряжения синхронного генератора 2 можно задавать величину электромагнитного момента для двигательных и тор- .„ мозных режимов работы привода Если величина Ug определяется сицхрон- ным генератором 2, то величина uji. определяется приложенным напряжением и частотой вращения двигателей, что определяет скорость движения транспортного средства Для перевода системы привода в режим торможения машина 3 переводится в режим синхронного компенсатора Для этой цели подвод механической энергии со стороны вала к машине 3 от дизеля прекращается, и управление режимом осуществляется по цепи возбуждения, а параллельно тяговым асинхронным двигателям подключаются тормозные резисторы 6, При этом тяговые асинхронные двигатели 4 работают в режиме асинхронных генераторов. Необходимая реакзом, что для характерной скорости движения преобразователь 7 частоты работает с частотой ,0, -Уровен напряжения на двигателях обеспечива ется заданием возбуждения синхронно го генератора 2, Так как преобразов тель 7 частоты вынесен из силовой.ц пи двигателей, а в качестве тяговог генератора выбрана машина 3 двойног питания, уровни напряжений двигател
и преобразователя 7 частоты выбираются независимо. Это позволяет пост вить эти элементы устройства в наиб лее благоприя.тные условия р
Для реализации свойств механичес кого дифференциала, что необходимо для маневрирования привода, а также упрощения силовой схемы привода обмотки статора тяговых двигателей 5 45 включены пофазно последовательно (с фиГо2)с,.При повороте двигатели внут реннего и наружного бортов вращаютс с разными скоростями, в соответстви с этими скоростями на обмотках двигателей перераспределяются напряжен так как эквивалентные сопротивления двигателей зависят от скольжения дв гателей:
50
L - г + i5-0-I5- -Ii +
14.(Г 1-J 1 + ГТ 1
т (х
i + Crp
, +
.где г .,
I 1
i + CT)
+ X Wr
f/ активные сопротивления
88584
тивная мощность вырабатывается машиной Зо
На входы регуляторов 15 напряже- t ния и 16 частоты подаются задающие сигналы, fо и сОр , синхронный генератор 2 возбуждается, и напряжение через преобразователь 7 частоты подается на ротор машины 3, возбуждая Q ее, что обеспечивает требуемые напряжения и частоту на тяговых асин- . хронных двигателях 4, которые определяются уровнем напряжения, подаваемого на возбуждение синхронного гене- t5 ратора 2, и соотношением
Wu5 ПЧ ()
где Шд - угловая скорость дизеля; частота преобразователя 20частоты;
си с частота напряжения тяговых асинхронных питателейПараметры всех электрических ма
5
„
зом, что для характерной скорости движения преобразователь 7 частоты работает с частотой ,0, -Уровень напряжения на двигателях обеспечивается заданием возбуждения синхронного генератора 2, Так как преобразователь 7 частоты вынесен из силовой.цепи двигателей, а в качестве тягового генератора выбрана машина 3 двойного питания, уровни напряжений двигателей
и преобразователя 7 частоты выбираются независимо. Это позволяет поставить эти элементы устройства в наиболее благоприя.тные условия р
Для реализации свойств механического дифференциала, что необходимо для маневрирования привода, а также упрощения силовой схемы привода обмотки статора тяговых двигателей 5 5 включены пофазно последовательно (см,, фиГо2)с,.При повороте двигатели внут-, реннего и наружного бортов вращаются с разными скоростями, в соответствии с этими скоростями на обмотках двигателей перераспределяются напряжения, так как эквивалентные сопротивления двигателей зависят от скольжения двигателей:
0
г + i5-0-I5- -Ii +
14.(Г 1-J 1 + ГТ 1
т (х
i + Crp
+
г .,
I 1
i + CT)
+ X Wr
f/ активные сопротивления
X
статора и ротора; сопротивление намагничивающего контура; реактивные сопротивления рассеяния статора и ротора;
скольжениео Разные напряжения устанавливаютя в этой схеме автоматически в соF
SS рыми работают двигатели при прохождении поворотов транспортным средствомо
С помощью измерительных катушек 10 и П, расположенных на статоре тяговых двигателей, и интеграторов 12. и 13 определяют потокосцепления по осям: ,
е 5 dt; е s/jdt,
о - ЭДС, индуктируемые в
измерительных катушках.
частоту вектора потоко- тора:
:
So/
А-s/iV o/
Vs,.
vL
V5o V3%
в соответствии с уравнением (1) отрабатывается такой ток возбуждения синхронного генератора, чтобы поддерживался заданный момент.
Для выполнения операций вычисления Vgrn, uj,g и (f c-,служит блок 14, и затем сигнал , сравнивается в регуляторе с напряжением на двигателе, получаемым от датчика 9, и -в соответствии с заданием по моменту вырабатывается задание на напряжение двигателей.
Блок 8 управления также вырабатывает, задание на частоты в соответствии с алгоритмом (Z)
Для выработки задания на частоту напряжения в блоке 8 управления сигнал частоты вектора потокосцепления сравнивается с заданием в регуляторе 16
Благодаря тому, что сравниваются между собой напряжение и ЭДС тягового двигателя, имеется возможность остаточно точно задавать величину и
я
5885846
знак момента (Тое определять режим работы привода) при фиксированной частоте, а предлагаемая реализация измерения потокосцеплений и сравнительно простые вычисления обеспечивают высокую точность о Формула из обретения
10
20
25
30
1 о Тяговый электропривод автономного транспортного средства, содержащий тепловой двигатель, с которым механически связаны электромашинный регулятор напряжения и тяговый син- 15 хронный генератор, к статорной обмотке которого подключены тяговые асинхронные двигатели, преобразователь часто.ты, соединенный входом с выходом электромащинного регулятора напряжения, и блок управления преобразователем частоты, отличающийся тем, что, с целью повышения надежности, электромашинный регулятор напряжения связан механически с тяговым генератором, который выполнен в виде машины двойного питания, причем статорные обмотки тяговых асинхронных двигателей соединены пофазно последовательно, а обмотка ротора машины двойного питания подключена к выходу преобразователя частоты, управляющий вход которого соединен с одним из выходов блока управления, к другому выходу которого подключен 5 управляющий вход электромашинного регулятора напрял ения, при этом управляющие входы блока управления связа- ны со статорными обмотками асинхронных двигателей
0 2о Электропривод, по По1, отличающийся тем, что на статорах асинхронных двигателей установлены измерительные катушки, к которым подключен один из управляющих входов бло- 5 ка управления, который включает в себя регуляторы напряжения и частоты, интеграторы и блок вычислений, одни из входов которого соединены с выходами интеграторов, а выходь - с ин- 0 формационным входами регуляторов напряжения и частоты, причем входы интеграторов и другие входы блока вычислений, управляюш 1й вход регулятора напряжения, выходы регуляторов на- 5 пряжения и частоты являются соответственно одним и другим управляющими входами и выходами блока управления,
От блока дпрабления
i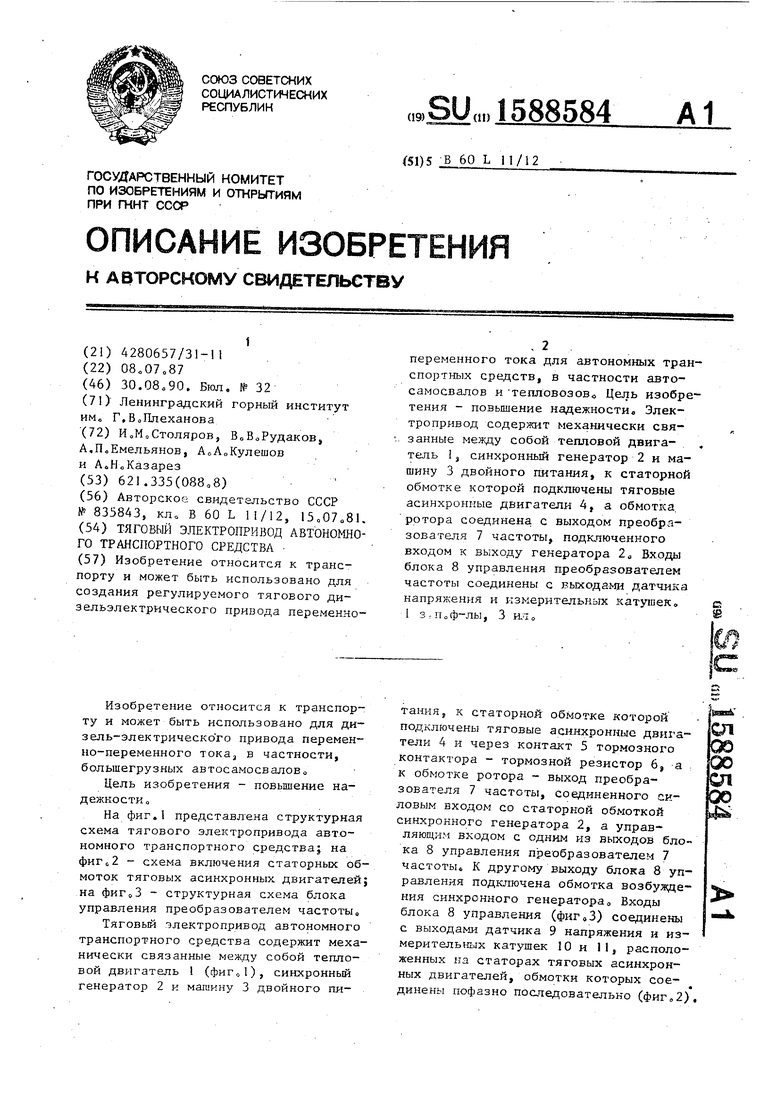
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| Электропривод | 1987 |
|
SU1439729A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| Устройство для регулирования скорости асинхронного двигателя | 1982 |
|
SU1064411A1 |
Изобретение относится к транспорту и может быть использовано для создания регулируемого тягового дизельэлектрического привода переменно-переменного тока для автономных транспортных средств, в частности, автосамосвалов и тепловозов. Цель изобретения - повышение надежности. Электропривод содержит механически связанные между собой тепловой двигатель 1, синхронный генератор 2 и машину 3 двойного питания, к статорной обмотке которой подключены тяговые асинхронные двигатели 4, а обмотка ротора соединена с выходом преобразователя 7 частоты, подключенного входом к выходу генератора 2. Входы блока 8 управления преобразователем частоты соединены с выходами датчика напряжения и измерительных катушек. 1 з.п. ф-лы, 3 ил.
Фиг, 1
ГМ2TAAi
Л.TAA,ZТАА1
иг.г
... JSm ,. S
-L i t / / .J.. т/.
в
CPU J
Составитель Л.Резникова
едактор ЛоВеселовская Техред М.Дидык
Заказ 2507Тираж 386Подписное
ВНИИПИ Госуда|)ствеяного комит:ета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-355 Раушская наб., д, 4/5
Корректор ЭоЛончакова
| Тяговый привод транспортногоСРЕдСТВА | 1979 |
|
SU835843A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
