Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в механизмах передвижения мостовых кранов с индивидуальным электроприводом асинхронных двигателей опор крана.
Известно устройство для направления движения мостового крана, содержащее бесконтактные датчики положения колес относительно рельса, вводящие резисторы в роторные цепи асинхронных электродвигателей (патент RU 2405735, опубл. 10.12.2009).
Недостатками данного устройства являются низкая надежность из-за большого числа коммутационной аппаратуры, необходимость применения асинхронных электродвигателей с фазным ротором, дополнительные потери энергии в резисторах, коррекция перекоса относительно только одного из рельсов подкранового пути.
Известен способ ограничения перекоса мостового крана, в котором используются четыре бесконтактных датчика, непрерывно измеряющих расстояния от заданных точек крана до обоих рельсов, на основании показаний которых с учетом направления движения крана происходит формирование сигнала коррекции (Патент РФ на изобретение RU 2405735 / Опубл. 27.12.2013).
К недостаткам данного изобретения относятся использование одноконтурной скалярной системы регулирования скорости асинхронных двигателей с короткозамкнутым ротором, что не позволяет непосредственно регулировать момент и потокосцепление двигателей, снижает точность и ухудшает динамику привода, а также повышенное количество датчиков расстояния.
Известна система автоматизированного управления асинхронным электроприводом передвижения (Положительное решение о выдаче патента на полезную модель №2014133212/11 (053513) от 12.08.2014 - прототип), содержащая два датчика расстояния. В данной модели используется система прямого управления моментом (Direct Torque Control - DTC) и одновременная коррекция сигналов задания скорости обоих электродвигателей таким образом, чтобы, ускоряя один двигатель и замедляя другой, обеспечить устранение поперечного смещения и перекоса крана относительно рельсов.
В качестве замечаний по этой модели можно отметить недостаточно плавное изменение положения крана вследствие одновременной коррекции скорости обоих двигателей, использование сигнала направления движения крана, который в случае установки двух датчиков нецелесообразен, и высокую сложность системы DTC, которая пока не освоена отечественными производителями.
Известна также частотно-токовая система с автономным инвертором напряжения (АИН) и релейно-векторным алгоритмом управления (Виноградов А.Б. Векторное управление электроприводами переменного тока / Изд-во ИГЭУ. - Иваново, 2008), которая более проста и не менее надежна, чем DTC и ее целесообразно использовать при управлении электроприводом механизма передвижения мостового крана.
Целью изобретения является коррекция поперечного смещения мостового крана с высоким быстродействием и точностью, что способствует увеличению срока службы ходовой части крана, повышению коэффициента использования оборудования, сокращению расходов на его содержание и ремонт, повышению КПД механизма из-за снижения потребления электроэнергии.
Технический результат достигается тем, что в данном способе применены двухконтурные релейно-векторные системы регулирования скорости асинхронных двигателей опор крана с коррекцией поперечного смещения на базе двух бесконтактных датчиков, измеряющих расстояния от заданных точек крана до рельсов на противоположных опорах, сигналы которых Д1 и Д2 используются для анализа положения крана на основе вычисления дифференциального значения
Δ12=Д1-Д2,
позволяющего однозначно идентифицировать поперечное смещение крана относительно подкрановых путей, на основании которого происходит формирование сигнала коррекции Uk1/Uk2, который вычитается из сигнала задания скорости UЗC1/UЗC2 электродвигателя M1/M2 соответственно во внешнем контуре скорости релейно-векторной системы регулирования асинхронных двигателей опор, обеспечивая таким образом выравнивание и устранение поперечного смещения крана с целью исключения контакта реборд подкрановых колес с рельсами.
На фиг. 1 представлена структурная схема частотно-токовой системы управления электроприводом передвижения мостового крана, обеспечивающей коррекцию поперечного смещения. Структура электропривода двигателей обоих опор крана идентична и состоит из одинаковых элементов, которые на фиг. 1 обозначены одинаковыми цифрами. Здесь: 1 (M1, М2) - асинхронные электродвигатели с короткозамкнутым ротором, снабженные датчиками скорости 2 (BR) и питаемые от преобразователей частоты 3 (ПЧ с АИН); далее соответственно для каждой опоры крана: 4 (ЗИ) - задатчик интенсивности; 5 - алгебраический сумматор сигнала задания скорости, сигнала обратной связи по скорости и сигнала коррекции; 6 (PC) - регулятор скорости; 7 (БЗМ) - блок задания момента с учетом ограничения по моменту; 8 (КП) - координатный преобразователь; 9 - алгебраический сумматор сигнала задания тока статора и сигнала обратной связи по току; 10 (РФТ) - регулятор фазных токов; 11 (РИ) - распределитель импульсов; 12 (КОТ) - коэффициент обратной связи по току; 13 (КОС) - коэффициент обратной связи по скорости; 14 - алгебраический сумматор сигнала обратной связи по скорости и сигнала абсолютного скольжения; 15 (К1) - коэффициент преобразования сигнала задания тока статора по оси игрек к сигналу угловой скорости скольжения. В систему управления (фиг. 1) также входят следующие блоки, непосредственно обеспечивающие коррекцию поперечного смещения: 16 (БКП) - блок коррекции поперечного смещения и два датчика расстояния 17 (Д1) и 18 (Д2). Для наглядности и сокращения числа буквенных обозначений датчики расстояния и их сигналы обозначены одинаково: Д1 и Д2.
На фиг. 2 представлен общий вид мостового крана: 1 - асинхронные электродвигатели (M1, М2); 19, 20 - подкрановые рельсы; 21, 22 - концевые балки; 23, 24 - неприводные (ведомые) колеса; 27, 28 - редукторы; 29, 30 - приводные (ведущие) колеса; 31, 32 - пролетные балки; 33 - тележка; 17, 18 - бесконтактные датчики расстояния Д1, Д2 соответственно, установленные на раме крана вблизи ведомых (неприводных) колес.
Представленная функциональная схема управления с коррекцией поперечного смещения (фиг. 1) содержит для каждого из двигателей 1 (М1/М2) три внутренних контура релейного регулирования фазных токов статора 10 (РФТ), обеспечивающих работу АИН в токовом режиме. Гистерезис релейного регулятора выбирается, исходя из допустимой величины пульсаций электромагнитного момента и допустимой частоты переключений вентилей АИН. Распределители импульсов 11 (РИ) осуществляют распределение сигналов управления по шести ключам АИН преобразователя 3 с учетом формирования задержек при переключениях ключей одной фазы.
Внешний контур скорости с регулятором скорости 6 (PC) выполняет функцию регулирования скорости двигателя 1 (М1/М2) в соответствии с сигналами задатчиков интенсивности 4 (ЗИ), сигналов обратной связи по скорости и сигналов коррекции (Uk1/Uk2), суммируемыми в алгебраическом сумматоре 5. Сигнал коррекции всегда вычитается из сигнала задатчика интенсивности опережающей опоры. Сигналы коррекции формируются блоками коррекции перекоса 16 (БКП) с учетом разности сигналов датчиков 17 (Д1) и 18 (Д2)
Δ12=Д1-Д2
по алгоритму, представленному в таблице 1.
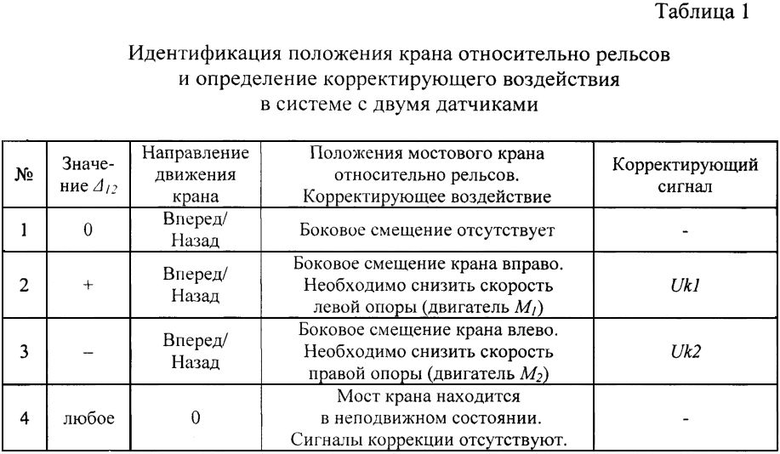
Значение корректирующего воздействия рассчитывается пропорционально разности Δ12 по формуле:
Uk=k·Δ12,
где Uk - значение корректирующего воздействия; k - коэффициент пропорциональности, который выбирается в зависимости от уровней сигналов и допустимого поперечного смещения крана.
При превышении сигналом Uk заданного порогового значения предусмотрено сохранение предшествующего превышению сигнала.
Таким образом, данная система управления представляет собой замкнутую двухконтурную систему регулирования скорости асинхронных двигателей 1 (М1/М2) с коррекцией поперечного смещения по сигналам бесконтактных датчиков расстояния. Обратные связи в соответствующих контурах регулирования формируются с учетом принятых коэффициентов обратной связи по скорости 13 (Кос) и току 12 (Кот). Блок задания момента 7 (БЗМ) формирует сигнал задания момента двигателя с учетом ограничений. Сигнал Iзу, вырабатываемый блоком 7 (сигнал задания тока по оси игрек), задает момент двигателя, сигнал Iзх (сигнал задания тока по оси икс) задает постоянную величину потокосцепления ротора, равную номинальному значению: ψR=ψRx=ψRн=const.
Переход от системы координат икс, игрек к фазным координатам осуществляется координатным преобразователем 8 (КП). Необходимая для этого угловая скорость магнитного поля асинхронного двигателя определяется выражением
ω0=ω+ωск,
где ω0 - сигнал задания угловой скорости магнитного поля; ω - сигнал задания угловой скорости ротора двигателя; ωск - сигнал задания угловой скорости скольжения.
При ψR=const угловая скорость скольжения ωск пропорциональна моменту двигателя и току Iзу, который преобразуется в ωск в блоке 15 и суммируется с сигналом угловой скорости в сумматоре 14. Сигнал угловой скорости вычисляется умножением скорости двигателя, измеренной датчиком 2 (BR), на коэффициент обратной связи по скорости 13 (Кос).
Сигналы задания фазных токов Isз суммируются с сигналами обратной связи по току в сумматоре 9 и рассогласование Δls поступает на релейные регуляторы фазных токов 10 (РФТ). Применение простой и надежной релейно-векторной системы управления будет способствовать повышению технико-экономических показателей крана.
Далее следует отметить, что в силу того, что опасен не перекос сам по себе, а поперечное (боковое) смещение моста, которое он вызывает, то можно констатировать, что предложенный способ позволяет упростить алгоритм работы. Это приведет к определенной потере точности, по сравнению с вариантом с четырьмя датчиками, так как система не сможет непосредственно реагировать на перекос (а только косвенно, через контроль поперечного смещения), но будет способствовать упрощению аппаратной реализации, кроме того, на однобалочном кране этот вариант единственно возможен. Как следует из таблицы 1, блок коррекции можно реализовать в этом случае как релейный регулятор с гистерезисным допуском Δ12.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОГРАНИЧЕНИЯ ПЕРЕКОСА МОСТОВОГО КРАНА | 2012 |
|
RU2502665C1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОСТОВОГО КРАНА | 2009 |
|
RU2405735C1 |
| СПОСОБ ЭНЕРГОЭФФЕКТИВНОГО ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ГИБКИМ ОГРАНИЧЕНИЕМ МОЩНОСТИ | 2015 |
|
RU2605458C1 |
| СПОСОБ ЭНЕРГОЭФФЕКТИВНОГО ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ В СИСТЕМЕ ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2015 |
|
RU2587162C1 |
| СПОСОБ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ПОДРУЛИВАЮЩИМИ УСТРОЙСТВАМИ ПРИ ШВАРТОВКЕ И ПРОХОЖДЕНИИ УЗКОСТЕЙ | 2013 |
|
RU2542833C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ, ПОДКЛЮЧЕННЫМИ ПАРАЛЛЕЛЬНО К ОДНОМУ ИНВЕРТОРУ | 2010 |
|
RU2428326C1 |
| Стенд для испытания двух взаимосвязанных электроприводов | 1980 |
|
SU957137A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ БЛОК УПРАВЛЕНИЯ ГОРОЧНЫМ СТРЕЛОЧНЫМ ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2368525C1 |

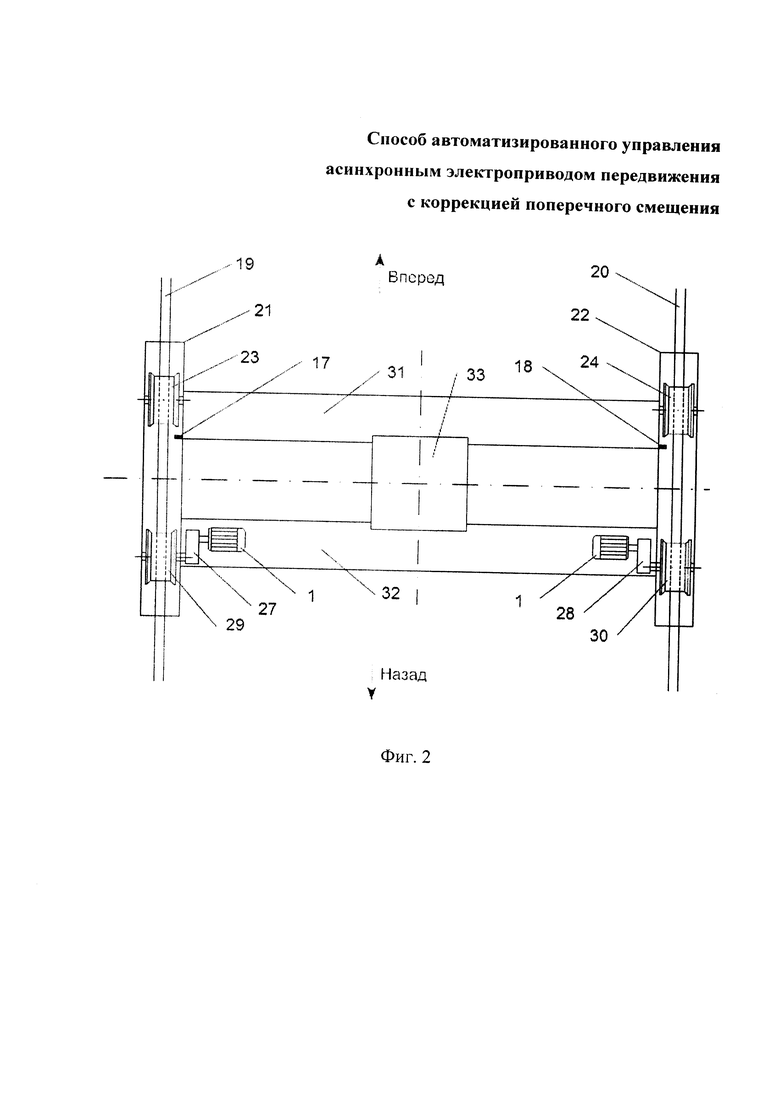
Изобретение может быть использовано в механизмах передвижения мостовых кранов с индивидуальным электроприводом асинхронных двигателей опор крана. В способе автоматизированного управления асинхронным электроприводом передвижения с коррекцией поперечного смещения применяют двухконтурные релейно-векторные системы регулирования скорости асинхронных двигателей опор крана с коррекцией поперечного смещения на базе двух бесконтактных датчиков (17, 18), измеряющих расстояния от заданных точек крана до рельсов (19, 20) на противоположных опорах. Сигналы датчиков Д1 и Д2 используют для анализа положения крана на основе вычисления дифференциального значения
Δ12=Д1-Д2,
позволяющего однозначно идентифицировать поперечное смещение крана относительно подкрановых путей. На основании вышеуказанного дифференциального значения формируют сигнал коррекции Uk1/Uk2, который вычитается из сигнала задания скорости UЗС1/UЗС2 электродвигателя M1/M2 соответственно во внешнем контуре скорости релейно-векторной системы регулирования асинхронных двигателей опор. Таким образом, обеспечивают выравнивание и устранение поперечного смещения крана с целью исключения контакта реборд подкрановых колес с рельсами. Достигается коррекция поперечного смещения мостового крана с высоким быстродействием и точностью, увеличение срока службы ходовой части крана, повышение коэффициента использования оборудования, сокращение расходов на его содержание и ремонт, повышение КПД механизма из-за снижения потребления электроэнергии. 2 ил., 1 табл.
Способ автоматизированного управления асинхронным электроприводом передвижения с коррекцией поперечного смещения, отличающийся тем, что в данном способе применены двухконтурные релейно-векторные системы регулирования скорости асинхронных двигателей опор крана с коррекцией поперечного смещения на базе двух бесконтактных датчиков, измеряющих расстояния от заданных точек крана до рельсов на противоположных опорах, сигналы которых Д1 и Д2 используются для анализа положения крана на основе вычисления дифференциального значения
Δ12=Д1-Д2,
позволяющего однозначно идентифицировать поперечное смещение крана относительно подкрановых путей, на основании которого происходит формирование сигнала коррекции Uk1/Uk2, который вычитается из сигнала задания скорости UЗС1/UЗС2 электродвигателя М1/М2 соответственно во внешнем контуре скорости релейно-векторной системы регулирования асинхронных двигателей опор, обеспечивая таким образом выравнивание и устранение поперечного смещения крана с целью исключения контакта реборд подкрановых колес с рельсами.
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОСТОВОГО КРАНА | 2009 |
|
RU2405735C1 |
| УСТРОЙСТВО ДЛЯ НАНИЗЫВАНИЯ ИЗОЛИРУЮЩИХ БУС НА ПРОВОЛОКУ | 0 |
|
SU152678A1 |
| Виноградов А.Б | |||
| Векторное управление электроприводами переменного тока | |||
| Издательство ИГЭУ.-Иваново, 2008. | |||

