Изобретение относится к области аэродинамики, в частности к автоматическим системам управления воздушным потоком в аэродинамических трубах.
При проведении натурных экспериментов в аэродинамических трубах (АДТ) на сверхзвуковых режимах важное место занимает поддержание давления воздуха в форкамере с заданной точностью.
Известен регулятор давления воздуха в форкамере АДТ, содержащий задающее устройство, выход которого связан с первым входом регулирующего блока, исполнительный механизм, связанный с регулирующим дросселем, установленным в трубопроводе, соединенным с газгольдером и форкамерой, в которой установлен датчик давления, подключенный ко второму входу регулирующего блока, а также включающий в себя контур самонастройки (Тепляшин В.А., Джикидзе Ф.В. Самонастраивающаяся система автоматического регулирования давления в форкамере аэродинамической трубы. // Труды ЦАГИ. - 1969. - Вып. 1170. - С. 3-17).
Контур самонастройки состоит из модели замкнутой системы и блока, формирующего законы перестройки коэффициентов, введенных в систему для компенсации изменения динамических характеристик объекта регулирования. Модель является одним из основных элементов контура самонастройки и служит эталоном, на основе которого анализируются характеристики системы.
Однако данная система сложна в реализации и требует для построения модели замкнутой системы априорного знания статических и динамических характеристик объекта во всем диапазоне изменения его рабочих параметров.
За прототип принят регулятор давления воздуха в форкамере АДТ, содержащий задающее устройство, регулирующий блок, исполнительный механизм, жестко связанный с регулирующим дросселем, установленным в трубопроводе, связывающем газгольдер с форкамерой, в которой установлен датчик давления, соединенной посредством сопла с рабочей камерой, с установленной в ней испытуемой моделью, из корректирующей цепи, в которую входят датчик давления, установленный в газгольдере, нормирующий преобразователь, подключающий датчик давления к блоку коррекции (Авторское свидетельство СССР №728119, МПК G05D 16/20, 15.04.1980).
Однако регулятор не учитывает динамическую характеристику регулирующего дросселя: зависимости изменения эффективной площади его проходного сечения по ходу его плунжера dF/dS и приведенный удельный расход воздуха через дроссель; q(λ), от которого зависит скорость истечения воздуха через дроссель. Это ограничивает область применения устройства и снижает качество регулирования давления воздуха в форкамере аэродинамической трубы.
Задачей и техническим результатом изобретения является создание устройства для регулирования давления воздуха в форкамере АДТ в широком диапазоне изменения приведенного удельного расхода воздуха через дроссель q(λ) и произвольной конфигурации щели регулирующего дросселя в функции положения его плунжера F(S) без каких-либо корректирующих устройств, тем самым обеспечив возможность применения устройства во всем диапазоне допустимых для АДТ значений числа М с высокой точностью в автоматическом режиме.
Решение поставленной задачи и технический результат достигаются тем, что в устройстве регулирования давления воздуха в форкамере, содержащем задающее устройство, исполнительный механизм, датчики температуры, давления, положения, а также регулятор давления, регулятор давления состоит из сумматора отрицательной обратной связи по давлению, последовательно соединенных фильтра нижних частот и обращенной модели объекта управления, замкнутых положительной обратной связью через сумматор моделью объекта управления, входы регулятора подключены к задающему устройству и датчикам давления и температуры воздуха в форкамере, температуры и давления воздуха в газгольдере, положения плунжера регулирующего дросселя и критического сечения сопла.
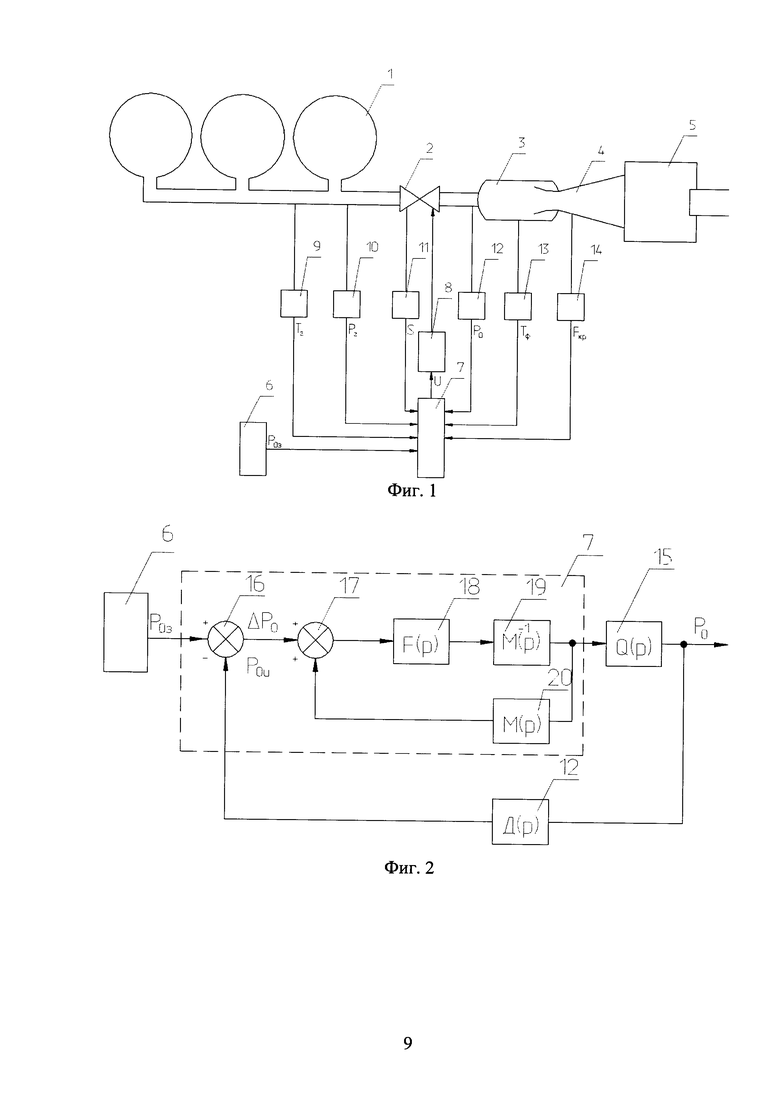
Фиг. 1 - схема включения регулятора давления воздуха в форкамере в систему управления воздушным потоком АДТ.
Фиг. 2 - структурная схема замкнутой системы регулирования давления воздуха в форкамере АДТ.
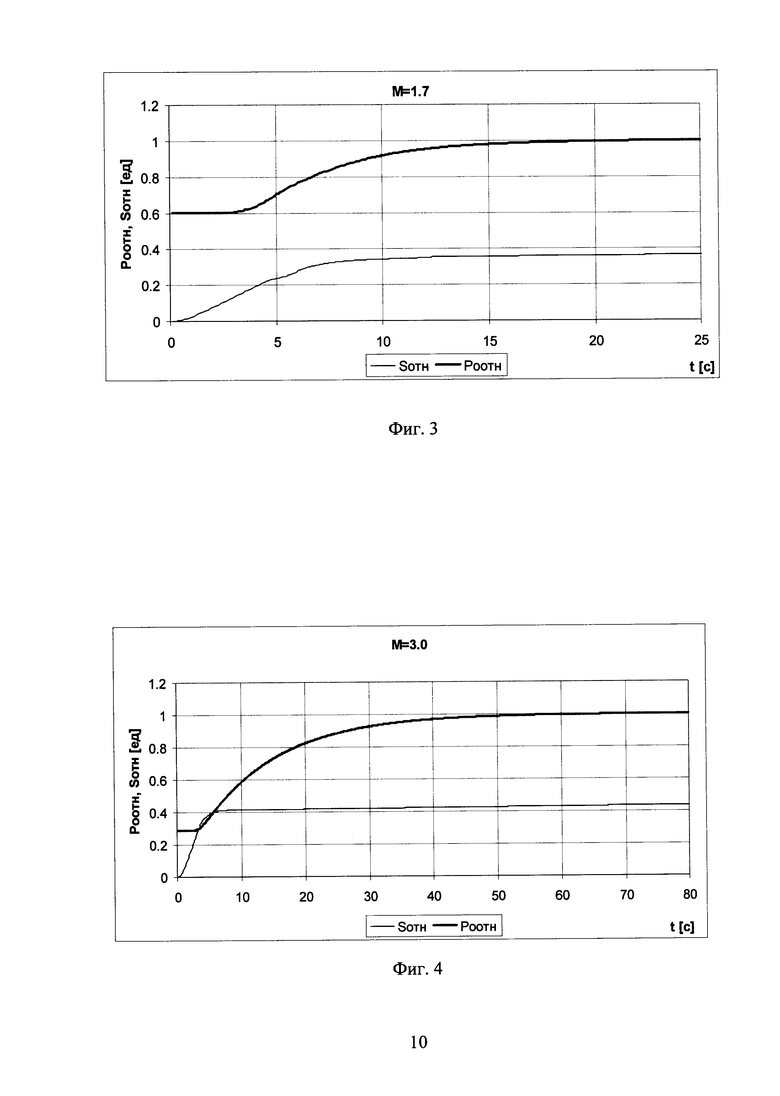
Фиг. 3 - графики переходного процесса выхода воздуха в форкамере на заданное значение в сверхзвуковой АДТ для М=1.7.
Фиг. 4 - графики переходного процесса выхода воздуха в форкамере на заданное значение в сверхзвуковой АДТ для М=3.0.
На фиг. 1 представлена схема включения регулятора давления воздуха в форкамере в систему управления воздушным потоком АДТ. Газгольдеры 1 через регулирующий дроссель 2 соединены с форкамерой АДТ 3, которая, в свою очередь, через сопло 4 соединена с рабочей частью АДТ 5, в которой расположена испытуемая модель. Задатчик требуемого на эксперимент давления 6 соединен с цифровым регулятором давления 7, выход которого подключен ко входу приводного устройства дросселя 8. Входы регулятора давления 7 соединены с выходами датчиков температуры 9 и давления 10 в газгольдере, датчика положения плунжера регулирующего дросселя 11, датчиков давления 12 и температуры 13 в форкамере и датчиками, по которым определяется значение критического сечения сопла 14.
Воздух высокого или низкого давления из газгольдеров 1 через регулирующий дроссель 2 поступает в форкамеру АДТ 3 и через сопло 4 в рабочую часть 5, где установлена испытываемая модель. Заданное давление Р0з в форкамере 3, сформированное задатчиком 6, поддерживается цифровым регулятором 7 через приводное устройство 8, перемещающим плунжер дросселя S, изменяющим его проходное сечение F. На входы цифрового регулятора давления кроме заданного значения давления в форкамере Р0з подают сигналы датчиков: температуры Тг 9 и давления Рг 10 в газгольдере, хода (положения) плунжера дросселя S 11, давления Р0 12 и температуры Tф 13 в форкамере, и значения критического сечения сопла Fкр 14.
На фиг. 2 представлена структурная схема замкнутой системы регулирования давления в форкамере АДТ, где цифрой 6 обозначен задатчик давления в форкамере Р0з, 7 - регулятор давления в форкамере, состоящий из сумматора 16 отрицательной обратной связи по давлению, последовательно соединенных фильтра нижних частот 18, имеющего передаточную функцию F(p), и обращенной модели объекта управления 19, имеющей передаточную функцию М1(р), замкнутые положительной обратной связью через сумматор 17 моделью объекта управления 20, имеющей передаточную функцию М(р), собственно объект управления 15, описываемый передаточной функцией Q(p), 12 - датчик давления в форкамере, сигнал которого является сигналом отрицательной обратной связи.
При идентичности объекта управления Q(p) и его модели М(р), т.е. при Q(p)=M(p) передаточная функция регулятора в операторной форме имеет вид

а передаточная функция замкнутой системы

В установившемся режиме W=F(p) и Р0=Р0з.
При малых отклонениях от установившегося режима объект управления представлен апериодическим звеном вида

где Т0 - постоянная времени объекта управления, зависящая от числа М или Fкр(М)

К0 - коэффициент усиления объекта управления

Р0 - давление воздуха в форкамере;
Рг - давление воздуха в газгольдере;
q(λ) - приведенный удельный расход воздуха через дроссель;
Fкр - критическое сечение сопла;
F - эффективная площадь сечения дросселя;
S- ход плунжера дросселя;
k, R - газовые постоянные;
Vф - объем форкамеры;
Тф, Тг - температура в форкамере и газгольдере соответственно.
Цифровой регулятор давления реализует функцию
u[n]=k3Δр0[n]+k2(Δр0[n]-Δр0[n-1])/Δt+
+k1(Δр0[n]-2Δр0[n-1]+Δр0[n-2])/Δt2,
а коэффициенты регулятора вычисляются через текущие параметры объекта регулирования
k1=T0Tпр/K0KпрTf; k2=(T0+Tпр)/К0КпрТf; k3=1/K0KпрTf,
- Δt - временной интервал между тактами пересчета;
- n, n-1, n-2 - номера тактов пересчета;
- Δр0[n], Δр0[n-1], Δр0[n-2] - рассогласование между заданным Р0з и измеренным Р0 значениями давления в форкамере на n, n-1, n-2 тактах соответственно;
- Тf - постоянная времени фильтра нижних частот;
- Tпр, Кпр - постоянная времени и коэффициент усиления приводного устройства соответственно;
- u[n] - управляющий сигнал приводным устройством;
- Т0, К0 определяются выражениями (2), (3).
Фиг. 3 и 4 иллюстрируют переходный процесс выхода давления воздуха в форкамере на заданное значение в сверхзвуковой АДТ для М=1.7 и М=3.0 соответственно. Верхняя утолщенная кривая соответствует изменению давления в форкамере в относительных единицах давления измеренного и заданного на эксперимент Р0отн=Р0/Р0зад. Нижняя утонченная кривая соответствует изменению положения плунжера регулирующего дросселя в относительных единицах измеренного и максимального Sотн=S/Smax.
Результаты использования устройства подтверждены математическим моделированием на имитаторе сверхзвуковой аэродинамической трубы. Процесс выхода на заданное давление и его поддержания с использованием предложенного регулятора иллюстрируется фиг. 3 (число Маха М=1.7) и фиг. 4 (число Маха М=3.0). Как видно из графиков P0(t) при заданном числе М в широком диапазоне выход на заданное давление апериодический, без перерегулирования, что особенно важно на предельных для АДТ режимах по числу М. Точность поддержания Р0 соответствует техническим требованиям. Устройство эффективно в АДТ с малым объемом форкамеры по отношению к объему газгольдера и (или) малой скоростью перемещения плунжера регулирующего дросселя.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР ДАВЛЕНИЯ ВОЗДУХА В ФОРКАМЕРЕ АЭРОДИНАМИЧЕСКОЙ ТРУБЫ С ФОРСИРОВАННЫМ ВЫХОДОМ НА ЗАДАННЫЙ РЕЖИМ | 2015 |
|
RU2587518C1 |
| Способ регулирования давления в замкнутом объеме и устройство для его реализации | 2018 |
|
RU2688950C1 |
| Регулятор давления воздуха в форкамере аэродинамической трубы | 1978 |
|
SU728119A1 |
| Аэродинамическая труба | 2018 |
|
RU2696938C1 |
| АЭРОДИНАМИЧЕСКАЯ ТРУБА | 2013 |
|
RU2526515C1 |
| Способ проведения испытаний в аэродинамических трубах с моделированием влияния вертикального, горизонтального или смешанного порыва ветра | 2024 |
|
RU2827746C1 |
| СПОСОБ ДИСПЕРГИРОВАНИЯ ЖИДКОСТИ В СТРУЕ ДИСПЕРСИОННОЙ ВОЗДУШНОЙ СРЕДЫ В АЭРОЗОЛЬ И МОБИЛЬНЫЙ ГЕНЕРАТОР АЭРОЗОЛЯ РЕГУЛИРУЕМОЙ МНОГОМЕРНЫМ ВОЗДЕЙСТВИЕМ ДИСПЕРСНОСТИ, СМЕСИТЕЛЬ, КЛАПАН СОГЛАСОВАНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА (ВАРИАНТЫ) | 2011 |
|
RU2489201C2 |
| Способ проведения испытаний в аэродинамической трубе с моделированием влияния периодического порыва ветра | 2024 |
|
RU2830394C1 |
| Способ проведения высокотемпературных испытаний в аэродинамической трубе | 2024 |
|
RU2828615C1 |
| СПОСОБ СОЗДАНИЯ РАБОЧЕГО ГАЗА В ИМПУЛЬСНОЙ АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 2014 |
|
RU2567097C1 |
Изобретение относится к области экспериментальной аэродинамики, в частности к аэродинамическим трубам. Устройство содержит задающее устройство, исполнительный механизм, датчики температуры, давления, положения, а также регулятор давления. Регулятор давления состоит из сумматора отрицательной обратной связи по давлению, последовательно соединенных фильтра нижних частот и обращенной модели объекта управления, замкнутых положительной обратной связью через сумматор моделью объекта управления. Входы регулятора подключены к задающему устройству и датчикам давления и температуры воздуха в форкамере, температуры и давления воздуха в газгольдере, положения плунжера регулирующего дросселя и критического сечения сопла. Технический результат заключается в возможности использования регулятора во всем диапазоне допустимых для АДТ значений числа М с высокой точностью в автоматическом режиме без корректирующих устройств. 4 ил.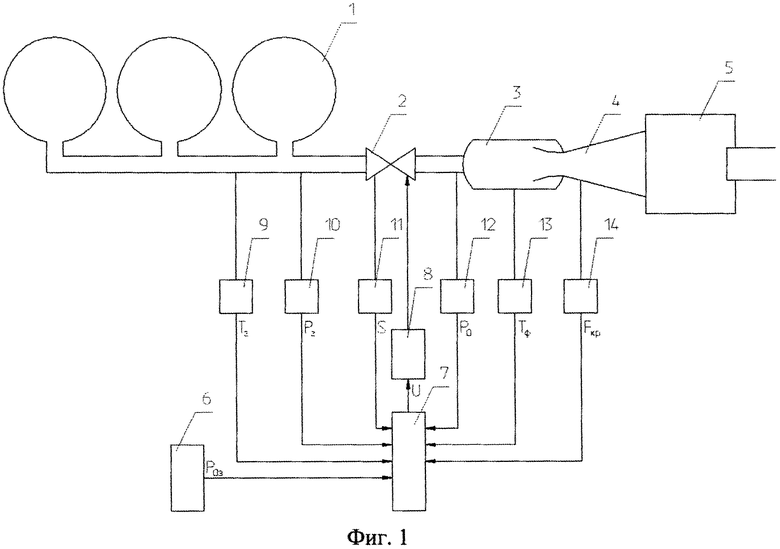
Устройство регулирования давления воздуха в форкамере, содержащее задающее устройство, исполнительный механизм, датчики температуры, давления, положения, а также регулятор давления, отличающееся тем, что регулятор давления состоит из сумматора отрицательной обратной связи по давлению, последовательно соединенных фильтра нижних частот и обращенной модели объекта управления, замкнутых положительной обратной связью через сумматор моделью объекта управления, входы регулятора подключены к задающему устройству и датчикам давления и температуры воздуха в форкамере, температуры и давления воздуха в газгольдере, положения плунжера регулирующего дросселя и критического сечения сопла.
| Регулятор давления воздуха в форкамере аэродинамической трубы | 1978 |
|
SU728119A1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ | 0 |
|
SU253470A1 |
| Тепляшин В.А., Джикидзе Ф.В | |||
| Самонастраивающаяся система автоматического регулирования давления в форкамере аэродинамической трубы // Труды ЦАГИ | |||
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| - Вып.1170 | |||
| - С | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СВЕРХЗВУКОВОЙ АЭРОДИНАМИЧЕСКОЙ ТРУБОЙ | 0 |
|
SU210915A1 |

