Изобретение относится к железнодорожному транспорту, а именно к токоприемникам высокоскоростных поездов.
Известен способ работы токоприемника, включающий компенсацию изменения усилия прижима лыжи к контактному проводу аэродинамической силой [Михеев В.П. Токосъемное устройство для высокоскоростных поездов / Железнодорожный транспорт, 1997, №6, с. 46-48].
Недостатками этого способа являются:
- низкая эффективность работы при возникновении колебаний токоприемника или контактного провода;
- зависимость усилия прижима лыжи от направления ветра по отношению к аэродинамическому профилю.
Прототипом является способ работы токоприемника на электрическом подвижном составе, включающий подвод электрической энергии через контактную лыжу, стабилизацию величины усилия ее прижима к контактному проводу путем воздействия подъемной силой аэродинамического профиля на звено токосъемника, которое выполняют в виде двух рычагов, соединенных между собой упругой связью, воздействием на которые вызывают противоположные по знаку усилия прижима и производят изменение величины упругой связи [Пат. РФ 2481200, МПК B60L 5/00, 2013].
Недостатком прототипа является ухудшение стабилизации усилия прижима лыжи к контактному проводу при низкой скорости движения локомотива, когда возрастает величина упругой связи между локомотивом и рычагами токосъемника.
Задачей изобретения является устранение этого недостатка, а именно повышение стабилизации усилия прижима токосъемника к контактному проводу, уменьшение амплитуды их колебаний и увеличение надежности работы.
Задача решается тем, что в токоприемнике для высокоскоростных поездов, содержащем раму, верхнее звено которой состоит из одноплечего и двуплечего рычагов, нижнее звено одним концом установлено с возможностью поворота на оси упора платформы, а другим концом посредством первых оси и пружины соединено с двуплечим рычагом, одно плечо которого скреплено с первым аэродинамическим профилем, а другое - через вторые ось и пружину связано с первым концом одноплечего рычага, несущего второй аэродинамический профиль со стабилизатором, второй конец одноплечего рычага соединен с лыжей, взаимодействующей с контактным проводом, по крайней мере на первой оси, которая установлена с возможностью вращения в звене и двуплечем рычаге, с натягом посажен упругий элемент, закрепленный одним концом в двуплечем рычаге, при этом в звене выполнен паз с заклинивающей поверхностью, в котором размещено тело качения, имеющее возможность взаимодействия с последней и концом первой оси. Упругий элемент выполнен в виде спиральной пружины. Сечение пружины выполнено прямоугольной формы.
Указанные отличительные признаки позволяют достичь следующих преимуществ по сравнению с прототипом.
Размещение на первой оси, которая установлена с возможностью вращения в звене и двуплечем рычаге, с натягом упругого элемента, закрепленным одним концом в двуплечем рычаге, и выполнение в звене паза с заклинивающей поверхностью, в котором размещено тело качения, имеющее возможность взаимодействия с последней и концом первой оси, позволяет повысить стабильность усилия прижима лыжи к контактному проводу за счет демпфирования колебаний рамы, возникающих при движении локомотива. При этом упрощается конструкция демпфера, состоящая, по существу, из двух деталей, что повышает надежность токоприемника.
Выполнение упругого элемента в виде спиральной пружины дает возможность сравнительно легко изменять усилие сопротивления демпфера за счет числа витков пружины, что упрощает конструкцию и повышает ее надежность.
Выполнение сечения пружины прямоугольной формы позволяет создать нужное усилие сопротивления демпфера меньшим количеством витков, что, в свою очередь, делает это усилие более стабильным. Это повышает надежность работы токоприемника и улучшает стабилизацию усилия прижима к контактному проводу.
Изобретение поясняется чертежами.
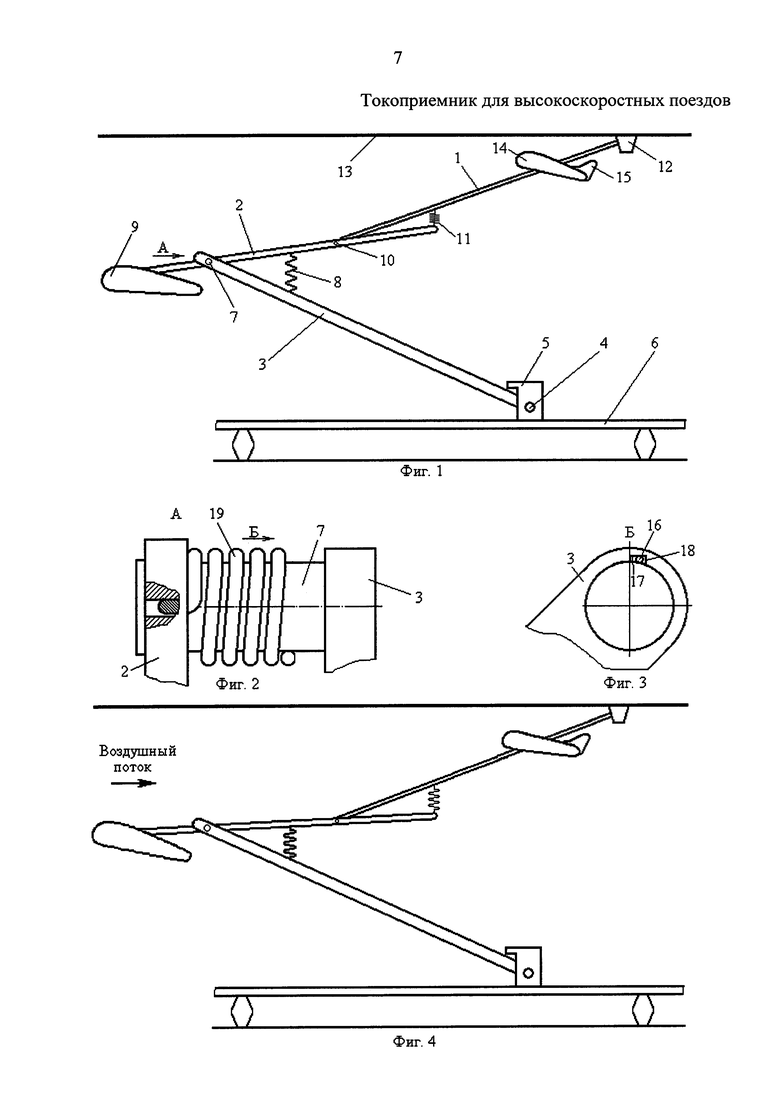
На фиг. 1 изображен токоприемник в момент начала движения локомотива. На фиг. 2 изображен вид A рамы токоприемника. На фиг. 3 изображен вид Б рамы токоприемника. На фиг. 4 изображен токоприемник в момент движения локомотива с установленной скоростью.
Токоприемник содержит раму, верхнее звено которой состоит из одноплечего 1 и двуплечего 2 рычагов, а нижнее 3 звено одним концом установлено с возможностью поворота на оси 4 упора 5 платформы 6, а другим концом посредством оси 7 вращения и пружины 8 соединено с двуплечим рычагом, одно плечо которого скреплено с аэродинамическим профилем 9, а другое - через ось 10 вращения и пружину 11 связано с первым концом одноплечего рычага, второй конец которого соединен с лыжей 12, взаимодействующей с контактным проводом 13. На одноплечем рычаге установлен аэродинамический профиль 14 со стабилизатором 15. Ось 7 установлена с возможностью вращения в звене 3 и двуплечем рычаге 2 и с возможностью контакта с телом вращения 16, имеющим возможность взаимодействия с заклинивающей поверхностью 17 паза 18 двуплечего рычага 2, на котором закреплен один конец пружины 19, плотно посаженой на ось 7.
Токоприемник для высокоскоростных поездов работает следующим образом.
При подъеме токоприемника нижнее 3 звено поворачивается по часовой стрелке на оси 4 до упора 5 (фиг. 1). Двуплечий рычаг 2 поворачивается с осью 7 против часовой стрелки, увлекая при этом одноплечий рычаг 1, посредством которого лыжа 12 прижимается к контактному проводу 13. Усилие прижима обеспечивается пружинами 8 и 11, которые находятся в поджатом состоянии.
При движении локомотива по неровному пути происходят колебания платформы 6 в вертикальной плоскости. При движении нижнего звена 3 вниз заодно с платформой 6 двуплечий рычаг 2 будет свободно поворачиваться на оси 7 против часовой стрелки, затягивая при этом на ней витки пружины 19, в результате чего ось 7 будет повертываться заодно с этой пружиной (фиг. 2). При этом вращение этой оси также будет происходить против часовой стрелки, а поэтому тело 16 качения будет находиться в пазу 4 звена 3, не препятствуя вращению оси и, следовательно, двуплечему рычагу 2, который, поворачиваясь заодно с осью 7 против часовой стрелки, будет компенсировать опускание платформы (фиг. 3).
При движении звена 3 вверх двуплечий рычаг 2 стремится повернуться по часовой стрелке и увлечь за собой через плотно посаженную пружину 19 ось 7, поворачивая ее по часовой стрелке. Это приведет к останову тела 16 качения на заклинивающей поверхности 17 звена 3 и, следовательно, оси 1. Продолжающий поворачиваться свободно на оси 7 рычаг 2 будет как бы несколько раскручивать витки пружины 19, в результате чего пружина будет проворачиваться относительно неподвижной оси 7, создавая момент трения, который будет противодействовать повороту указанного рычага, уменьшая скорость его вращения. Это приведет к демпфированию колебаний рычага 2 с пружиной 8, снижающему амплитуду колебаний и уменьшающему вероятность отхода лыжи 12 от контактного провода 13.
По мере увеличения скорости движения подвижного состава набегающий воздушный поток воздействует на аэродинамические профили 9 и 14. В результате этого двуплечий рычаг 2 начнет поворачиваться на оси 7 по часовой стрелке за счет подъемной силы, возникающей на аэродинамическом профиле 9, увлекая за собой конец одноплечего рычага 1, который под действием упругой силы пружины 11 и подъемной силы профиля 14 будет поворачиваться на оси 10 против часовой стрелки. При этом пружина 8 будет сжиматься, а пружина 11 - растягиваться, уменьшая силовое воздействие на одноплечий рычаг. Снижение силового воздействия пружины 11 компенсируется увеличением подъемной силы профиля 14, в результате чего усилие прижима лыжи к контактному проводу остается прежним. Таким образом, воздействие воздушного потока на аэродинамические профили 9 и 14 вызывает противоположные по знаку усилия, прикладываемые к лыже, благодаря чему результирующая сила прижима остается стабильной по величине.
Следует заметить, что поворот двуплечего рычага 2 по часовой стрелке способствует увеличению угла атаки на профиле 9 и, следовательно, повышению подъемной силы, а поворот одноплечего рычага 1 против часовой стрелки уменьшает угол атаки на профиле 14.
При достижении локомотивом установленной скорости пружина 11 полностью расправится, в результате чего величина упругой связи между рычагами 1 и 2 станет близка к нулю, при этом усилие прижима лыжи к проводу будет определяться подъемной силой аэродинамического профиля 14, что снизит воздействие механических колебаний подвижного состава на лыжу (фиг. 4). Если в узле соединения конца рычага 1 с осью 10 обеспечить возможность некоторого отклонения рычага 1 от вертикальной плоскости, то за счет стабилизатора 15 уменьшится воздействие на лыжу боковых механических колебаний состава. В результате при движении с установленной скоростью условия прижима лыжи к контактному проводу будут наилучшими.
Для высокоскоростных поездов характерно изменение скорости движения в большом диапазоне. Поэтому при росте скорости выше установленного значения необходимо сдерживать увеличение прижима лыжи к контактному проводу, чтобы не допустить чрезмерного усилия прижима. Это достигается следующими путями. Во-первых, дальнейший поворот рычагов 1 и 2 будет приводить к растягиванию пружины 11, в результате чего ее упругая сила будет направлена теперь уже в обратную сторону (вниз), что будет снижать прижим лыжи к контактному проводу. Во-вторых, момент от подъемной силы профиля 9 на двуплечем рычаге будет возрастать за счет увеличения плеча этой силы, что приведет к большему растягиванию пружины 11 и, следовательно, к снижению усилия прижима. В-третьих, будет уменьшаться угол атаки на профиле 14, вызывающий снижение величины подъемной силы, при этом также будет уменьшаться (за счет плеча) и момент от этой силы, благодаря чему понизится усилие прижима лыжи. Таким образом, с одной стороны действуют факторы, уменьшающие прижим лыжи, а с другой - имеет место фактор увеличения подъемной силы на аэродинамическом профиле 14 за счет увеличения скорости набегающего воздушного потока. Результирующее действие этих факторов обеспечивает стабильность усилия прижима лыжи к контактному проводу.
Внедрение изобретения позволит создать простую конструкцию токоприемника, обеспечивающую гашение колебаний звеньев рамы, стабильное усилие прижима лыжи к проводу и надежный электрический контакт в широком диапазоне скоростей подвижного состава.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ ТОКОПРИЕМНИКА НА ЭЛЕКТРИЧЕСКОМ ПОДВИЖНОМ СОСТАВЕ | 2012 |
|
RU2481200C1 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОЕЗДОВ | 2004 |
|
RU2272720C1 |
| ТОКОПРИЕМНИК РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2188136C2 |
| СПОСОБ РАБОТЫ ТОРМОЗА ГРУЗОВОГО ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2011 |
|
RU2476341C1 |
| Устройство токоприёмника высокоскоростного рельсового транспорта | 2022 |
|
RU2788213C1 |
| ТОКОПРИЕМНИК С АКТИВНЫМ РЕГУЛИРОВАНИЕМ ПОДВИЖНОЙ СИСТЕМЫ ДЛЯ ЭЛЕКТРОВОЗОВ | 2001 |
|
RU2201355C1 |
| ТОКОПРИЕМНИК ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2368513C1 |
| ФРЕЗЕРНО-СКРЕБКОВЫЙ ОЧИСТИТЕЛЬ ГОЛОЛЕДА НА КОНТАКТНОМ ПРОВОДЕ | 2024 |
|
RU2839204C1 |
| Боковой токоприемник для промышленных электровозов | 1975 |
|
SU519350A1 |
| ТОКОСЪЕМНОЕ УСТРОЙСТВО | 2001 |
|
RU2191708C2 |
Изобретение относится к токоприёмникам для линий энергоснабжения транспортных средств с электротягой. Токоприемник для высокоскоростных поездов содержит раму, верхнее звено которой состоит из одноплечего и двуплечего рычагов. Нижнее звено одним концом установлено с возможностью поворота на оси упора платформы, а другим концом посредством первых оси и пружины соединено с двуплечим рычагом. Одно плечо двуплечего рычага скреплено с первым аэродинамическим профилем, а другое - через вторые ось и пружину связано с первым концом одноплечего рычага, несущего второй аэродинамический профиль со стабилизатором. Второй конец одноплечего рычага соединен с лыжей, взаимодействующей с контактным проводом. На первой оси, которая установлена с возможностью вращения в звене и двуплечем рычаге, с натягом посажен упругий элемент, закрепленный одним концом в двуплечем рычаге. При этом в звене выполнен паз с заклинивающей поверхностью, в котором размещено тело качения, имеющее возможность взаимодействия с заклинивающей поверхностью и концом первой оси. Технический результат заключается в повышении надежности токоприемника. 2 з.п. ф-лы, 4 ил.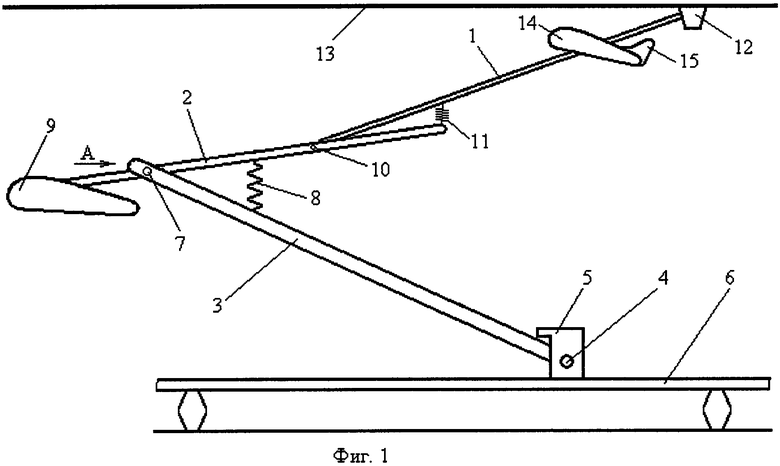
1. Токоприемник для высокоскоростных поездов, содержащий раму, верхнее звено которой состоит из одноплечего и двуплечего рычагов, нижнее звено одним концом установлено с возможностью поворота на оси упора платформы, а другим концом посредством первых оси и пружины соединено с двуплечим рычагом, одно плечо которого скреплено с первым аэродинамическим профилем, а другое - через вторые ось и пружину связано с первым концом одноплечего рычага, несущего второй аэродинамический профиль со стабилизатором, второй конец одноплечего рычага соединен с лыжей, взаимодействующей с контактным проводом, отличающийся тем, что по крайней мере на первой оси, которая установлена с возможностью вращения в звене и двуплечем рычаге, с натягом посажен упругий элемент, закрепленный одним концом в двуплечем рычаге, при этом в звене выполнен паз с заклинивающей поверхностью, в котором размещено тело качения, имеющее возможность взаимодействия с последней и концом первой оси.
2. Токоприемник по п. 1, отличающийся тем, что упругий элемент выполнен в виде спиральной пружины.
3. Токоприемник по любому из пп. 1, 2, отличающийся тем, что сечение пружины выполнено прямоугольной формы.
| СПОСОБ РАБОТЫ ТОКОПРИЕМНИКА НА ЭЛЕКТРИЧЕСКОМ ПОДВИЖНОМ СОСТАВЕ | 2012 |
|
RU2481200C1 |
| ТОКОПРИЕМНИК С АКТИВНЫМ РЕГУЛИРОВАНИЕМ ПОДВИЖНОЙ СИСТЕМЫ ДЛЯ ЭЛЕКТРОВОЗОВ | 2001 |
|
RU2201355C1 |
| Способ придания целлюлозным материалам противогнилостных свойств | 1961 |
|
SU147168A1 |
| JP 8275303 A, 18.10.1996. | |||

