Настоящее изобретение относится к узлу механизма рулевого управления с усилителем для системы рулевого управления с усилителем, в частности для системы рулевого управления с гидравлическим усилителем, автомобилей, а также к применению соответствующего узла.
Узлы механизма рулевого управления с усилителем для системы рулевого управления с гидравлическим усилителем автомобилей среди прочего содержат сервоклапаны, которые также известны как поворотные сервоклапаны. Они регулируют гидравлическое давление и, таким образом, усилитель рулевого привода, в зависимости от момента сил, приложенного водителем к рулевому колесу. В большинстве случаев используются поворотные сервоклапаны, в которых входной вал, соединенный посредством рулевой колонки с рулевым колесом, вращается относительно части клапана (обозначаемой также регулирующим элементом, регулирующей втулкой или втулкой), которая соединена с выходным валом и, в случае рулевого управления с реечным механизмом, с рулевой шестерней (обозначаемой также ведущей шестерней или пиньоном). Посредством торсионной системы между входным валом и регулирующим элементом осуществляется зависимая от вращающего момента регулировка регулирующего элемента сервоклапана и, таким образом, обеспечивается зависимость характеристики клапана и, следовательно, усилителя рулевого привода от вращающего момента.
Для осуществления различных других функций регулятора вращающего момента, например, функции систем обеспечения продольной устойчивости автомобиля, системы контроля избыточной и недостаточной поворачиваемости руля управления, системы тактильной обратной связи, изменяемого усиления рулевого привода, например, в зависимости от скорости движения или нагрузки, режима «City Mode» (Режим «Город»), парк-пилота, наложения вращающих моментов и так далее, известна независимая от приложенного вращающего момента установка положения регулирующего элемента для оказания воздействия на характеристику сервоклапана в отношении усиления рулевого привода.
Такого рода сервоклапан механизма рулевого управления с усилителем описан, например, в публикации DE 102004049686 A1. В этом случае регулировка характеристики усилителя рулевого привода осуществляется за счет установки относительного угла поворота между регулирующим элементом и выходным валом сервоклапана.
Исходя из уровня техники, в основу настоящего изобретения положена задача, состоящая в том, чтобы усовершенствовать узел механизма рулевого управления с усилителем таким образом, чтобы лучше контролировать его функционирование, с тем чтобы повысить безопасность движения и/или улучшить регулировку усилителя рулевого привода.
Эта задача решается посредством узла механизма рулевого управления с усилителем, согласно п. 1 формулы, а также посредством использования данного узла. Другие особенно предпочтительные варианты осуществления изобретения раскрываются в соответствующих зависимых пунктах формулы изобретения.
Следует отметить, что отдельные признаки формулы изобретения могут произвольным образом комбинироваться друг с другом и определять другие варианты осуществления изобретения. Описание характеризует и уточняет изобретение, в частности, со ссылкой на приложенные чертежи.
Предлагаемый в изобретении узел механизма рулевого управления с усилителем для системы рулевого управления с усилителем автомобилей содержит входной вал для соединения с рулевым колесом, выходной вал, соединенный с входным валом, для активного зацепления с продольной рулевой тягой, причем соединение между входным валом и выходным валом допускает относительное вращение между ними. Кроме того, согласно изобретению, предусмотрен серворегулятор, предпочтительно гидравлический сервоклапан, с вращающимся регулирующим элементом, находящимся в зацеплении с выходным валом и приводимым в движение выходным валом, причем в зависимости от относительного вращения между входным валом и регулирующим элементом осуществляется управление усилителем рулевого привода. Согласно изобретению, зацепление между выходным валом и регулирующим элементом предусматривает относительное (угловое) смещение между выходным валом и регулирующим элементом. Кроме того, согласно изобретению, предусмотрен исполнительный элемент, например, электродвижущий или электромагнитный исполнительный элемент, для осуществления относительного смещения регулирующего элемента по отношению к выходному валу, чтобы оказывать воздействие на характеристику усиления рулевого привода.
Кроме того, узел механизма рулевого управления с усилителем согласно изобретению содержит датчик для измерения, по меньшей мере, одного угла рассогласования между регулирующим элементом и выходным валом или между регулирующим элементом и входным валом. Кроме того, предусмотрен блок обработки для осуществления обработки предоставленных датчиком измеренных величин. Измеренные данные предпочтительно служат для контроля функционирования и безопасности узла механизма рулевого управления с усилителем.
Назначение изобретения состоит в том, чтобы в системе рулевого управления с регулирующим элементом, вращающимся относительно выходного вала, получать важную с точки зрения надежности функционирования и осуществления автоматического управления дополнительную информацию для оказания воздействия на усиление рулевого привода. При этом отпадает необходимость в размещении второго элемента упругости (Т-образного элемента) между входным валом и выходным валом для обеспечения относительного вращения в рулевом вале, которое требовалось бы для традиционного датчика вращающего момента, причем обеспечивается преимущество того, что на восприятие при осуществлении рулевого управления не оказывается отрицательное воздействие, характерное в противном случае.
Благодаря размещению датчика вблизи рулевого механизма, угол поворота может быть измерен непосредственно между входным валом и регулирующим элементом. Поворот в узле механизма рулевого управления с усилителем описываемого типа может быть вызван либо водителем, либо исполнительным элементом. В том случае, когда исполнительный элемент и водитель одновременно воздействуют на регулирующий элемент и осуществляют перемещение, эта информация может быть получена посредством обратного расчета при известности пути перемещения исполнительного элемента, и можно получить исключительно информацию о вождении. Эта информация имеет важное значение с точки зрения безопасности, чтобы определить, имеет ли водитель контакт с рулевым колесом.
Кроме того, изготовитель автомобиля может отказаться от интеграции датчика угла поворота рулевого колеса в колонку рулевого управления. Это позволяет сэкономить монтажное пространство, уменьшить издержки и вес автомобиля.
Перед поездкой в режиме системного самотестирования может быть в полном объеме проверено функционирование в отношении осуществляемого исполнительным элементом относительного перемещения регулирующего элемента по отношению к выходному валу. Например, пока водитель еще не включил двигатель и, следовательно, пока не осуществляется усиление рулевого управления при помощи насоса, исполнительный элемент посредством поворота управляющего элемента за весь его путь перемещения, например, до соответствующего стопора, может обеспечить полную проверку работоспособности системы.
Например, нейтральное положение в отношении обеспечиваемого установочным механизмом изменения характеристики усилия на органе управления, например, его среднего положения, может быть определено и проверено на основании того, переместилась ли система с момента предыдущей поездки или поездок, например, посредством данных, записанных в ЭСППЗУ (электрически стираемое перепрограммируемое ПЗУ) совместно с фактически определенными данными.
Пока в процессе поездки исполнительный элемент находится в нейтральном положении, по углу рассогласования может быть определен устанавливаемый водителем вращающий момент. Кроме того, является возможным определить смещение системы за долгий период времени. Как правило, сигнал датчика должен сравниваться с другими имеющимися в автомобиле сигналами. Так, например, возможно посредством сравнения скоростей движения колес, посредством измерения поперечного ускорения или определения скорости «рыскания» определять различные ситуации при движении (например, движение по прямой). В этом случае для балансировки регулирующего элемента на нейтральное положение может быть проведена дополнительная юстировка, так чтобы водитель при движении по прямой в зависимости от ситуации имел возможность осуществлять нейтральное в отношении вращающего момента управление.
Кроме того, за счет минимальных шагов перестановки исполнительного элемента может быть выявлен механический гистерезис/люфт перемещения. Поскольку датчики имеют очень малую разрешающую способность, эти шаги перестановки не могут быть проанализированы водителем, но механическая информация о гистерезисе, например, производственные допуски, используются в стратегии регулировки. Таким образом, на следующем этапе за время работы системы на основании упомянутой выше функции возможно выявлять и также компенсировать увеличение люфта, вызванного например, износом.
Зная это, в процессе осуществления рулевого управления водителем и при одновременном регулировании регулирующего элемента посредством исполнительного элемента можно определить, обеспечивается ли фактически требуемое дополнительное перемещение. На основании этого можно дополнительно определить, сохраняет ли водитель вообще контакт с рулевым колесом. Если это не так, то регулирующий элемент должен, например, посредством исполнительного элемента повернуть, например, втулку клапана в нейтральное положение, поскольку в противном случае исполнительным органом будет осуществляться нежелательный процесс рулевого управления и автомобиль покинет желаемую траекторию.
Пока водитель осуществляет рулевое управление при одновременном наложении, на основании этого, разумеется, можно в обратной последовательности посредством вычисления разности определить момент сил, приложенный водителем к рулевому колесу.
Узел согласно изобретению по существу может быть соединен с любым рулевым механизмом между выходным валом и продольной рулевой тягой или соответственно валом сошки рулевого управления, предпочтительной является передача зубчатая рейка-шестерня или шарико-винтовая передача. Понятия «продольная рулевая тяга» и «вал сошки рулевого управления» являются синонимами и относятся к соответствующему типу используемого рулевого механизма. В автомобилях промышленного назначения предпочтительно используется шарико-винтовая передача - в этом случае рулевой механизм также называется рулевым механизмом, выполненным в одном блоке с усилителем -, в частности, в комбинации с гидравлическим сервоклапаном.
Согласно другому предпочтительному варианту осуществления изобретения, исполнительным элементом является шаговый двигатель. Таким образом, например, можно отказаться от использования углового кодера для измерения устанавливаемого относительного перемещения. При использовании шагового двигателя на основании необходимых шагов и передаточного отношения передачи регулирования может быть спрогнозировано ожидаемое относительное перемещение для регулирующего элемента, например, клапанной втулки. Кроме того, посредством сравнения информации, полученной от шагового двигателя и от датчиков, может быть проверено, установилось ли требуемое значение или имеет место ошибка установки со слишком малым, слишком большим или самопроизвольно установившимся значением.
Зацепление между выходным валом и регулирующим элементом предпочтительно содержит многоступенчатую планетарную передачу.
Сервоклапан и датчик предпочтительно расположены в стойке клапана картера рулевого механизма, или датчики могут быть, по меньшей мере, закреплены на стойке клапана картера рулевого механизма.
Регулирующий элемент предпочтительно является клапанной втулкой, расположенной коаксиально по отношению к входному валу и выходному валу.
Датчик предпочтительно содержит датчик угла рассогласования или, по меньшей мере, два датчика угла поворота. При этом речь предпочтительно идет о бесконтактных датчиках, таких как оптические, индуктивные или магнитные датчики. Еще более предпочтительно речь идет о магнитных датчиках с постоянными магнитами или о индуктивных датчиках.
Согласно предпочтительному варианту осуществления изобретения, датчик содержит гильзу датчика, которая без возможности вращения соединена с клапанной втулкой.
Другие признаки и преимущества изобретения раскрываются в остальных пунктах формулы изобретения, а также в нижеследующем описании и не ограничиваются примерами осуществления изобретения, которые детально описаны со ссылкой на приложенные чертежи, на которых представлено:
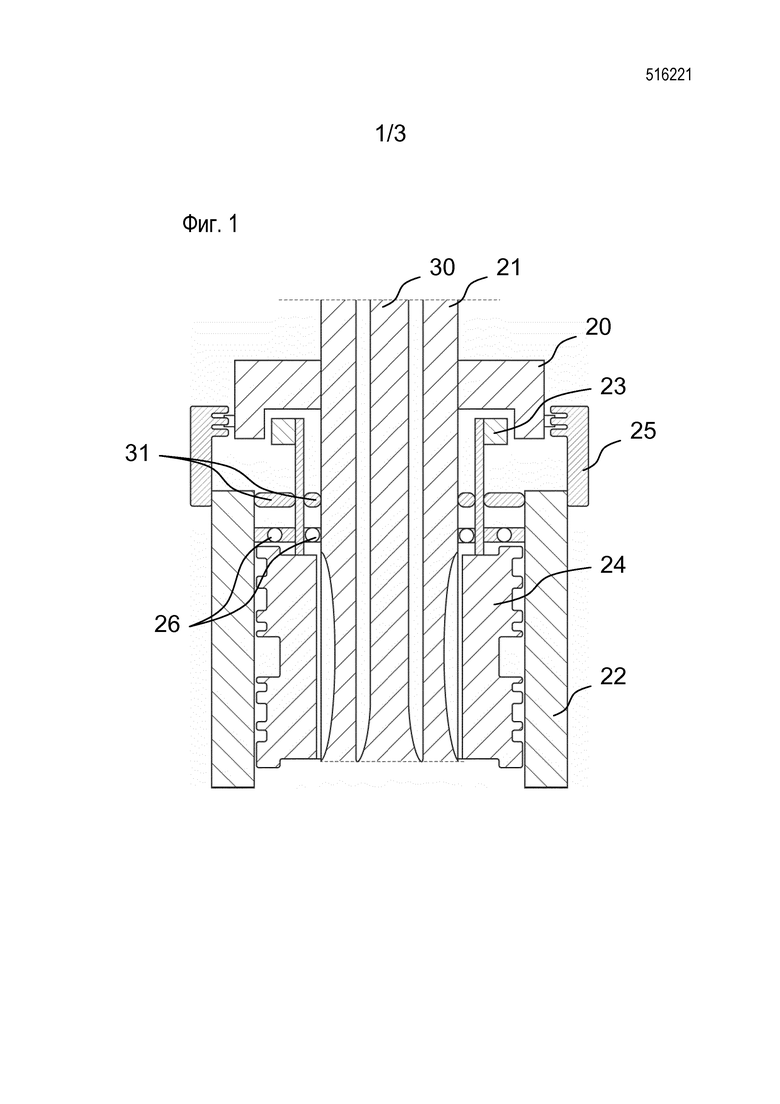
фиг. 1 - изображение в разрезе вдоль продольной оси первого варианта осуществления узла механизма рулевого управления с усилителем согласно изобретению;
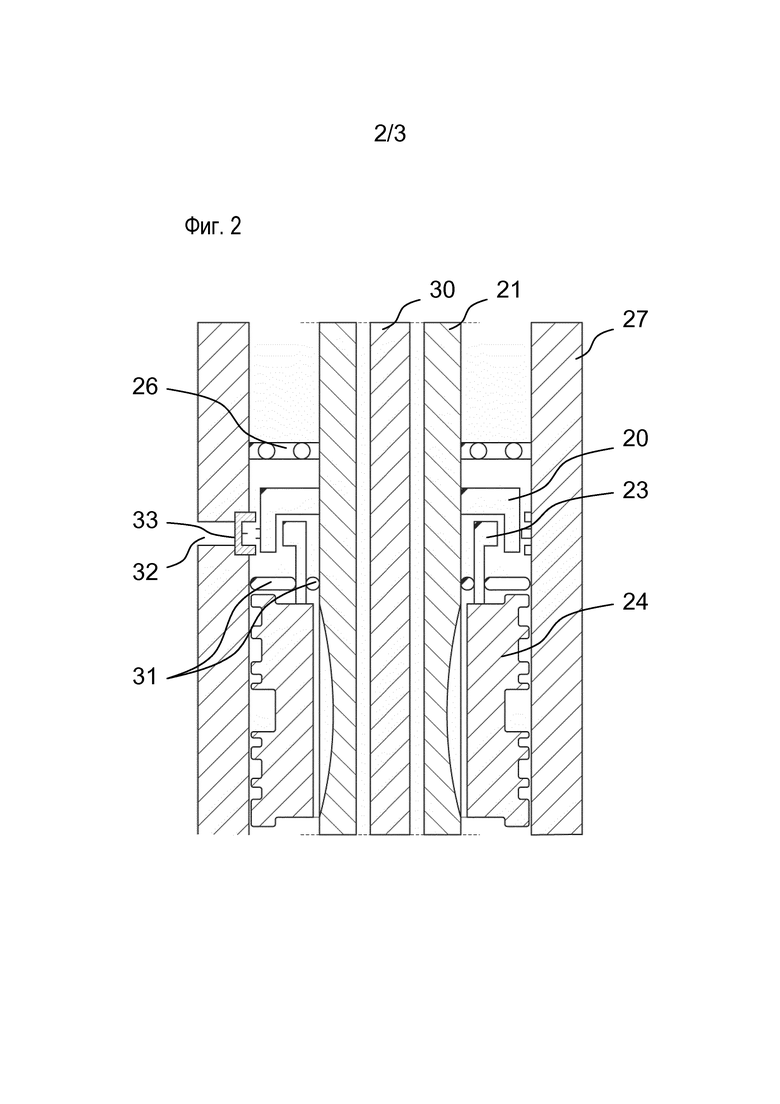
фиг. 2 - изображение в разрезе второго варианта осуществления изобретения;
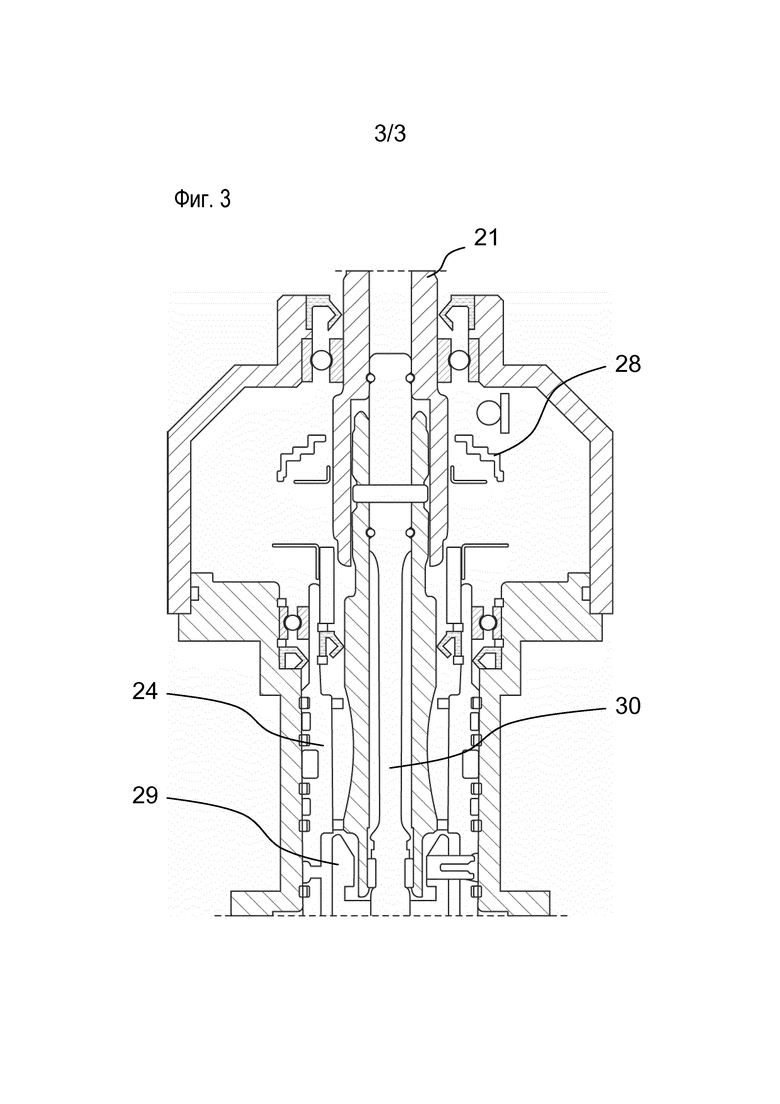
фиг. 3 - изображение в разрезе третьего варианта осуществления изобретения.
Датчик 20 угла рассогласования насажен на входной вал 21 и закреплен на картере над стойкой 22 клапана. Основной элемент датчика 20 угла рассогласования без возможности относительного вращения соединен с входным валом 21, а магнит 23 посредством втулки, которая без возможности вращения соединена с клапанной втулкой 24, в качестве регулирующего элемента, выводит втулку 24 посредством поворота на угол поворота из гидравлической зоны стойки клапана. Третья часть 25 датчика 20 неподвижно соединена со стойкой 22 клапана и подает информацию об угле рассогласования между входным валом 21 и клапанной втулкой 24 через штекер или подобный узел не представленного на чертеже блока обработки.
В представленном на фиг. 1 варианте осуществления изобретения опорный узел (обычно имеющийся в рулевых механизмах с гидравлическим усилением) для осуществления центрирования и компенсации осевых сил содержит два концентрически расположенных шарикоподшипника 26. Представленный на фиг. 2 вариант осуществления изобретения представляет собой модификацию первого варианта осуществления изобретения. Стойка 27 клапана удлинена, и вышеупомянутая центрирующая опора 26 установлена над датчиком 20.
На фиг. 3 представлен другой вариант осуществления изобретения, который, среди прочего, отличается использованием индуктивного датчика 28 для определения угла рассогласования между входным валом 21 и клапанной втулкой 24.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ КЛАПАН С ПЛАНЕТАРНОЙ ПЕРЕДАЧЕЙ | 2010 |
|
RU2524506C2 |
| КОМБАЙН, СОСТОЯЩИЙ ИЗ ДВУХ ШАРНИРНО СОЧЛЕНЕННЫХ УЗЛОВ | 1999 |
|
RU2237990C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ С ПРИВОДОМ НА ПЕРЕДНИЕ И ЗАДНИЕ КОЛЕСА | 1992 |
|
RU2032569C1 |
| АДАПТИВНАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2239576C2 |
| ВСПОМОГАТЕЛЬНОЕ ПРИВОДНОЕ УСТРОЙСТВО АВТОМОБИЛЯ | 2008 |
|
RU2483959C2 |
| УСИЛИТЕЛЬ РУЛЕВОГО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2770505C1 |
| УСОВЕРШЕНСТВОВАНИЯ В ПОЗИЦИОННЫХ СЕРВОСИСТЕМАХ ИЛИ ОТНОСЯЩИЕСЯ К ТАКИМ СИСТЕМАМ | 1995 |
|
RU2149787C1 |
| СПОСОБ ДЛЯ КОМПЕНСАЦИИ ЛЮФТА В ЗУБЧАТОЙ ПЕРЕДАЧЕ МЕЖДУ РУЛЕВЫМ КОЛЕСОМ И КЛАПАНОМ РУЛЕВОГО УПРАВЛЕНИЯ | 2013 |
|
RU2622323C2 |
| УСТРОЙСТВО ДЛЯ АКТИВНОГО РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ С ТАКИМ УСТРОЙСТВОМ | 2010 |
|
RU2503570C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1991 |
|
RU2029890C1 |
Группа изобретений относится к области транспортного машиностроения. Узел механизма рулевого управления с усилителем для системы рулевого управления с усилителем автомобилей содержит входной вал, выходной вал, серворегулятор, исполнительный элемент, датчик и блок обработки. Входной вал соединен с рулевым колесом. Выходной вал соединен с входным валом для активного зацепления с продольной рулевой тягой. Соединение между входным валом и выходным валом допускает относительное вращение между ними. Серворегулятор содержит вращающийся регулирующий элемент, находящийся в зацеплении с выходным валом. Зацепление между выходным валом и регулирующим элементом предусматривает относительное смещение между ними. Исполнительный элемент осуществляет относительное смещение регулирующего элемента по отношению к выходному валу. Датчик измеряет угол рассогласования между регулирующим элементом и выходным валом или между регулирующим элементом и входным валом. Блок обработки осуществляет обработку предоставленных датчиком измеренных величин. Используют в автомобиле упомянутый узел механизма рулевого управления с усилителем. Достигается повышение безопасности автомобиля. 2 н. и 8 з.п. ф-лы, 3 ил.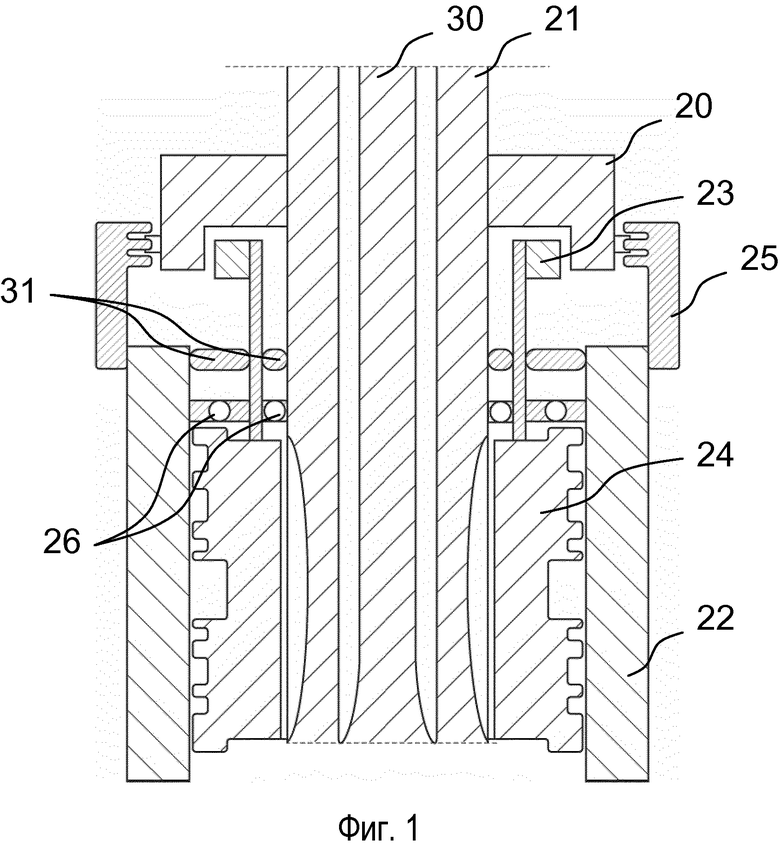
1. Узел механизма рулевого управления с усилителем для системы рулевого управления с усилителем автомобилей, содержащий:
- входной вал (21) для соединения с рулевым колесом;
- соединенный с входным валом (21) выходной вал (29) для активного зацепления с продольной рулевой тягой, причем соединение между входным валом (21) и выходным валом (29) допускает относительное вращение между ними;
- серворегулятор с вращающимся регулирующим элементом (24), находящимся в зацеплении с выходным валом (29) и приводимым в движение выходным валом (29), причем в зависимости от относительного вращения между входным валом (21) и регулирующим элементом (24) осуществляется управление усилителем рулевого привода, причем зацепление между выходным валом (29) и регулирующим элементом (24) предусматривает относительное смещение между ними;
- исполнительный элемент для осуществления относительного смещения регулирующего элемента (24) по отношению к выходному валу (29) для оказания воздействия на характеристику усилителя рулевого привода;
- датчик (20, 28) для измерения, по меньшей мере, одного угла рассогласования между регулирующим элементом (24) и выходным валом (29) или между регулирующим элементом (24) и входным валом (21);
- блок обработки для осуществления обработки предоставленных датчиком (20, 28) измеренных величин.
2. Узел механизма рулевого управления с усилителем по п.1 с продольной рулевой тягой, причем между выходным валом (29) и продольной рулевой тягой предусмотрена передача зубчатая рейка-шестерня или шарико-винтовая передача.
3. Узел механизма рулевого управления с усилителем по п.1 или 2, причем исполнительным элементом является шаговый двигатель.
4. Узел механизма рулевого управления с усилителем по п.1, причем зацепление между выходным валом (29) и регулирующим элементом (24) содержит многоступенчатую планетарную передачу.
5. Узел механизма рулевого управления с усилителем по п.1, причем сервогерулятором является гидравлический сервоклапан.
6. Узел механизма рулевого управления с усилителем по п.5, содержащий, кроме того, картер рулевого механизма, причем сервоклапан и датчик (20, 28) расположены в и/или закреплены на стойке (22, 27) клапана картера рулевого механизма.
7. Узел механизма рулевого управления с усилителем по п.6, причем регулирующий элемент (24) является клапанной втулкой, расположенной коаксиально по отношению к входному валу (21) и выходному валу (29).
8. Узел механизма рулевого управления с усилителем по п.1, причем датчик (20, 28) содержит датчик угла рассогласования или, по меньшей мере, два датчика угла поворота.
9. Узел механизма рулевого управления с усилителем по пп.7 и 8, причем датчик (20, 28) содержит гильзу (23) датчика, которая без возможности относительного вращения соединена с клапанной втулкой (24).
10. Применение узла механизма рулевого управления с усилителем по любому из пп.1-9 в автомобиле.
| Поршневая машина | 1989 |
|
SU1719690A1 |
| Поворотный золотниковый гидрораспределитель | 1980 |
|
SU1090269A3 |

