Изобретение относится к области диагностики железнодорожного пути и может быть использовано для контроля положения рельсового пути в горизонтальной плоскости, а именно для измерения кривизны рельсового пути и горизонтальных неровностей рельсовых нитей.
Известно устройство для контроля положения рельсового пути в горизонтальной плоскости [Патент РФ №9855, МПК Е01В 35/00], содержащее две концевые тележки, имеющие вертикальные оси для закрепления на них концов жесткой тяги, среднюю измерительную тележку с установленным на ней блоком измерения перемещений, отличающееся тем, что каждая концевая и средняя измерительная тележка, содержащая прямоугольную раму, установлена на одной измеряемой рельсовой нити с помощью двух колес, выполненных с ребордами, имеющими твердосплавные наконечники и расположенными с внутренней стороны измеряемой нити, а оси колес через подшипники закреплены в раме, в середине боковой стенки которой с внешней стороны измеряемой рельсовой нити установлен кронштейн с осью, на которой подвешена ось подвижного ролика, связанная через пружину с рамой тележки, к которой с внутренней стороны измеряемой рельсовой нити присоединена поперечная штанга, опирающаяся на противоположную рельсовую нить цилиндрическим роликом или скользящей лыжей, при этом первая по движению концевая тележка соединена со средней измерительной тележкой короткой жесткой тягой с наконечниками, посаженными на вертикальные оси этих концевых тележек, причем на верхней полке рамы средней измерительной тележки установлен подключенный к электронному блоку обработки измерительной информации датчик линейных перемещений, подвижный элемент которого связан с длинной жесткой тягой.
К недостаткам известного аналога относится узкая полоса пропускания неровностей, вызванная высокой инерционностью механических элементов измерительного устройства (пружина, тяга, цилиндрические ролики), наличие погрешности от галопирования тележек устройства.
Наиболее близким к предлагаемому изобретению по совокупности существенных признаков является устройство для контроля положения рельсового пути в горизонтальной плоскости, представленное в техническом описании «Вагон-путеизмеритель ЦНИИ-4» [Вагон-путеизмеритель ЦНИИ-4. Техническое описание. ЕИМН.663511.001 Т0. - М.: 1996]. Контроль стрелы изгиба в плане от несимметричной хорды измеряется по каждой из рельсовых нитей как сумма перемещений рельса относительно кузова вагона с помощью оптических датчиков в трех точках (через 4,5 м и 17 м). Таким образом, используется шесть оптических датчиков, установленных в трех сечениях на кузове вагона (по три на каждый рельс). В состав измерительного устройства также входит инерциальная навигационная система, используемая для измерения кривизны рельсового пути, которая определяется по изменению угла поворота скользящей вдоль пути хорды длиной, равной базе вагона в горизонтальной плоскости. Угол поворота хорды равен курсовому углу (азимуту продольной оси кузова), измеряемому инерциальной навигационной системой, минус угол виляния кузова, определяемый по разности горизонтальных перемещений противоположных концов кузова относительно рельсовой нити, измеряемых оптическими датчиками. Привязка результатов измерений к пройденной дистанции осуществляется при помощи датчика пути (одометра). Вычисление горизонтальных неровностей каждой из рельсовых нитей осуществляется в соответствующем блоке расчета горизонтальных неровностей.
К недостаткам изобретения относится большое количество оптических датчиков (по три на каждый рельс), вызванное раздельной обработкой данных этих датчиков и инерциальной навигационной системы и, как следствие, большие масса и габариты.
Технической задачей, решаемой изобретением, является уменьшение количества датчиков устройства, позволяющего измерять кривизну рельсового пути и горизонтальные неровности рельсовых нитей при помощи лишь двух оптических датчиков (по одному на каждый рельс), инерциальной навигационной системы и одометра.
Поставленная задача решается за счет того, что предложенное устройство, так же, как и известное, содержит одометр, инерциальную навигационную систему, два оптических датчика, направленных на внутренние части головок соответствующих рельсов, и два блока расчета горизонтальных неровностей. Но, в отличие от известного устройства, оно дополнительно содержит вычислительный блок, в состав которого входят два блока пересчета координат, две линии задержки на 12,5 метров, две линии задержки на 17 метров, линию задержки на 50 метров, сумматор и блок нормировки, инерциальная навигационная система и оптические датчики жестко механически связаны, каждый оптический датчик, инерциальная навигационная система и одометр соединены с входами вычислительного блока таким образом, что оптические датчики соединены с первыми входами соответствующих блоков пересчета координат, вторые входы блоков пересчета координат также соединены с инерциальной навигационной системой, выход каждого из блоков пересчета координат соединен с первыми входами двух линий задержки (на 12,5 и на 17 метров), вторые входы этих линий задержки также соединены с одометром, выходы этих линий задержки и блоков пересчета координат являются выходами вычислительного блока и соединены с входами блоков расчета горизонтальных неровностей рельса, инерциальная навигационная система соединена с первым входом линии задержки (на 50 метров), второй вход которой также соединен с одометром, а выход которой соединен с положительным входом сумматора, отрицательный вход сумматора соединен с инерциальной навигационной системой, выход сумматора соединен с блоком нормировки, выход которого является выходом вычислительного блока и вместе с выходами блоков расчета горизонтальных неровностей является выходами устройства в целом.
Достигаемый технический результат - уменьшение массогабаритных характеристик устройства за счет уменьшения количества используемых оптических датчиков. Это достигается тем, что инерциальная навигационная система и пара оптических датчиков (по одному на каждый рельс) жестко механически связываются, что позволяет осуществлять совместную обработку их показаний. В результате вместо трех одновременно производимых измерений координат головок рельсов относительно вагона тремя парами оптических датчиков проводятся три последовательных измерения с их взаимной привязкой по показаниям инерциальной навигационной системы.
Изобретение иллюстрируется чертежом, где на фиг. 1 представлена схема расположения датчиков устройства, на фиг. 2 - структурная схема устройства.
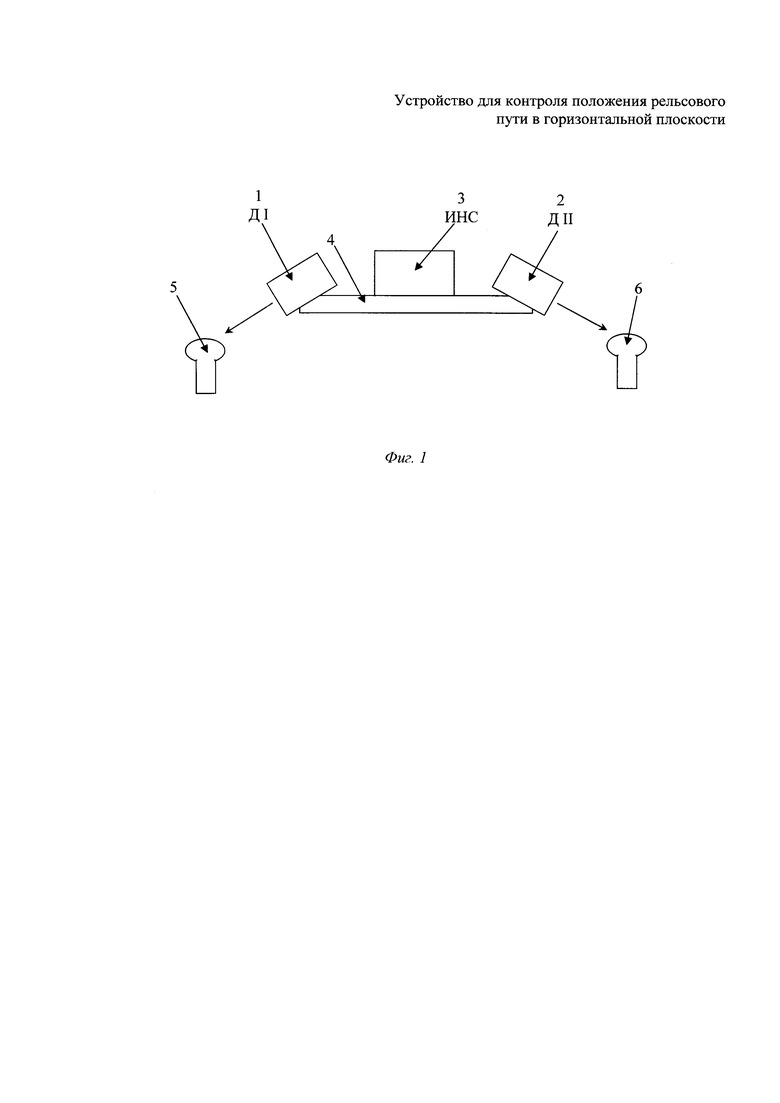
На схеме расположения датчиков устройства (фиг. 1) показаны два оптических датчика 1, 2 (Д I и Д II), которые жестко механически связаны с инерциальной навигационной системой 3 (ИНС) (например, крепятся на единой жесткой платформе 4), причем оптический датчик 1 устанавливают с одной стороны, так что его измерительная ось направлена на внутреннюю часть головки левого рельса 5, а оптический датчик 2 - с другой, так что его измерительная ось направлена на внутреннюю часть головки правого рельса 6 и угол наблюдения датчиками соответствующих рельсов относительно плоскости горизонта таков, что в их поле зрения попадают внутренние части головок соответствующих рельсов (например, 40°), измерения, производимые оптическими датчиками 1 и 2, осуществляются в системе координат, связанной с устройством (например, с единой жесткой платформой 4), наличие жесткой механической связи между инерциальной навигационной системой 3 и оптическими датчиками 1, 2 позволяет считать изменение их ориентации одинаковым, а значит, и использовать результат его измерения инерциальной навигационной системой 3 для пересчета измерений оптических датчиков 1, 2 к географической системе координат.
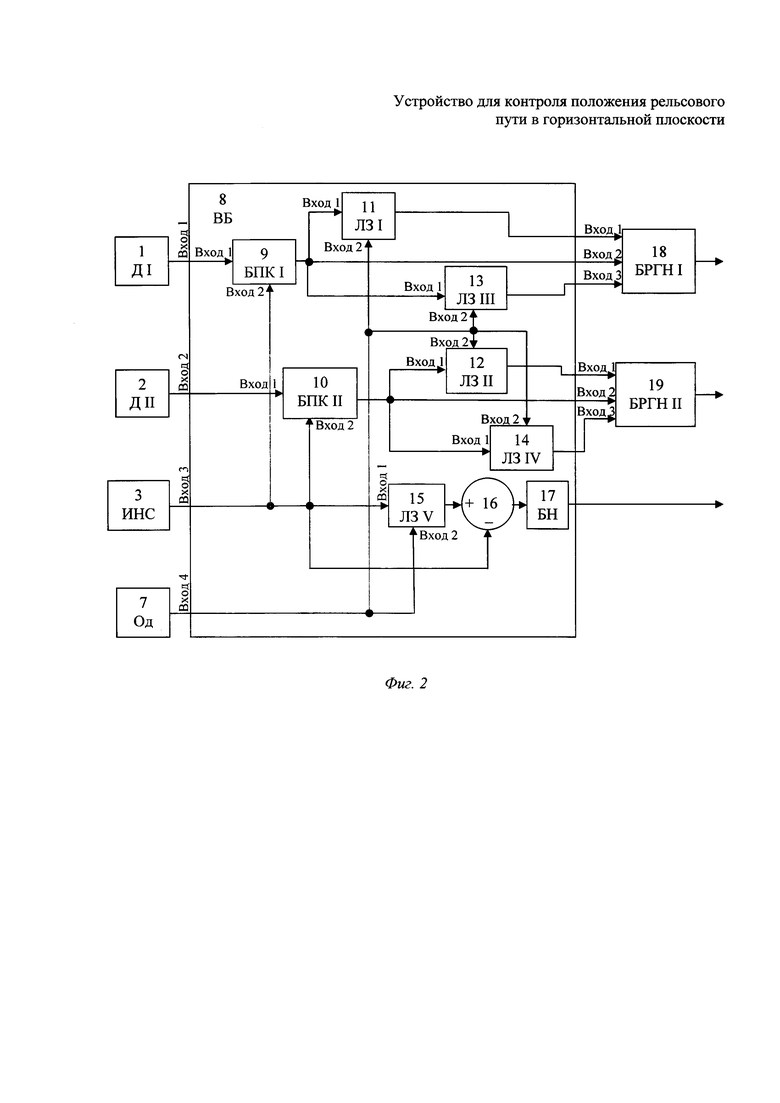
На структурной схеме устройства (фиг. 2) показаны оптические датчики 1, 2, инерциальная навигационная система 3, а также одометр 7 и вычислительный блок 8, внутри вычислительного блока 8 находятся два блока пересчета координат 9 и 10, две линии задержки 11 и 12 на 12,5 метров (здесь и далее величины задержки выбраны с учетом инструкции департамента пути и сооружений ОАО «РЖД» ЦПТ-46/15) и две линии задержки 13 и 14 на 17 метров для сигналов оптических датчиков 1 и 2, линия задержки 15 на 50 м для сигналов инерциальной навигационной системы, сумматор 16 и блок нормировки 17, выходы оптических датчиков 1, 2, инерциальной навигационной системы 3 и одометра 7 соединены с первым, вторым, третьим и четвертым входами вычислительного блока 8, соответственно, таким образом, что выходы оптических датчиков 1 и 2 соединены с первыми входами блоков пересчета координат 9 и 10, соответственно, вторые входы блоков пересчета координат 9 и 10 соединены с выходом инерциальной навигационной системой 3, выход блока пересчета координат 9 соединен с первыми входами линий задержки 11 и 13, выход блока пересчета координат 10 соединен с первыми входами линий задержки 12 и 14, вторые входы линий задержки 11, 12, 13 и 14 соединены с выходом одометра 7, выходы линии задержки 11, блока пересчета координат 9 и линии задержки 13 являются выходами вычислительного блока 8 и соединены, соответственно, с первым, вторым и третьим входами блока расчета горизонтальных неровностей 18, выходы линии задержки 12, блока пересчета координат 10 и линии задержки 14 являются выходами вычислительного блока 8 и соединены, соответственно, с первым, вторым и третьим входами блока расчета горизонтальных неровностей 19, выход инерциальной навигационной системы 3 соединен с первым входом линии задержки 15, второй вход которой соединен с выходом одометра, а выход которой соединен с положительным входом сумматора 16, отрицательный вход сумматора 16 соединен с выходом инерциальной навигационной системы 3, выход сумматора 16 соединен с блоком нормировки 17, выход которого является выходом вычислительного блока 8 и вместе с выходами блоков расчета горизонтальных неровностей 18 и 19 - выходами устройства в целом.
Рассмотрим пример работы устройства.
Оптические датчики 1, 2 и инерциальная навигационная система 3 жестко механически связываются (например, крепятся на единой жесткой платформе 4). Оптический датчик 1 направлен на внутреннюю часть головки левого рельса 5. Оптический датчик 2 направлен на внутреннюю часть головки правого рельса 6. Угол наблюдения датчиками соответствующих рельсов относительно плоскости горизонта таков, что в их поле зрения попадают внутренние части головок соответствующих рельсов (например, 40°). Оптические датчики 1 и 2 измеряют координаты соответствующих рельсов относительно текущего положения устройства (например, относительно единой жесткой платформы 4). Инерциальная навигационная система 3 измеряет курсовой угол (азимут продольной оси), а также крен и тангаж (углы качки) устройства (например, единой жесткой платформы 4) относительно географической системы координат. Наличие жесткой механической связи между инерциальной навигационной системой 3 и оптическими датчиками 1, 2 позволяет считать изменение их ориентации одинаковым, а значит, и использовать результат его измерения инерциальной навигационной системой 3 для пересчета измерений оптических датчиков 1, 2 к географической системе координат. При движении устройства по рельсовому пути одометр 7 вырабатывает сигнал, соответствующий пройденной дистанции. С выхода оптических датчиков 1 и 2 сигналы поступают в вычислительный блок 8, где передаются на первый вход блоков пересчета координат 9 и 10, соответственно, где с использованием углов, измеренных инерциальной навигационной системой 3 вырабатываются координаты рельсов относительно географической системы координат. Сигналы координат рельсов относительно географической системы координат с выходов блоков перечета координат 9 и 10 поступают на первые входы в линий задержки 11, 13 и 12, 14, соответственно, которые на основе данных, полученных от одометра 7, поступающих на их вторые входы, вводят в них задержку, определяемую временем прохождения устройством расстояния, на котором определяется стрела изгиба (12,5 - в линиях задержки 11 и 12, 17 м - в линиях задержки 13 и 14). Сигналы с выходов линий задержки 11, 13 и 12, 14 и сигналы координат рельсов относительно географической системы координат с выходов блоков перечета координат 9 и 10 являются выходами вычислительного блока 8 и поступают в блоки расчета горизонтальных неровностей 18 и 19, соответственно, где по измеренным в трех сечениях координатам определяется величина горизонтальных неровностей каждого рельса.
Сигналы углов ориентации устройства (например, курс, крен и тангаж единой жесткой платформы 4) поступают из инерциальной навигационной системы 3 на третий вход вычислительного блока 8, где передаются на первый вход линии задержки 15, которая на основе данных, полученных от одометра 7, поступающих на ее второй вход, вводит в них задержку, определяемую временем прохождения устройством расстояния, на котором вычисляется кривизна пути (50 м). Сигнал с выхода линии задержки 15 поступает на положительный вход сумматора 16, где вычитается из сигнала углов ориентации устройства (например, единой жесткой платформы 4), поступающих с третьего входа вычислительного блока 8 (выхода инерциальной навигационной системы 3) на отрицательный вход сумматора 16. Результат является приращением курсового угла устройства (например, единой жесткой платформы 4) на дистанции расчета кривизны. Данное приращение поступает в блок нормировки 17, где нормируется по пройденной дистанции (50 м). Результатом нормировки является кривизна пути.
Выход блока нормировки 17 является выходом вычислительного блока 8 и совместно с выходами блоков расчета горизонтальных неровностей 18, 19 - выходами устройства в целом.
Предложенное устройство было изготовлено и испытано путем экспериментальных проездов измерительной тележки с установленным на ней устройством.
Описание предложенного устройства доказывает возможность достижения технического результата - упрощения конструкции и уменьшения массогабаритных характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля состояния рельсового пути и для определения его пространственных координат | 2022 |
|
RU2793310C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| СПОСОБ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ НЕРОВНОСТЕЙ (РИХТОВКИ) И КРИВИЗНЫ В ПЛАНЕ РЕЛЬСОВЫХ НИТЕЙ | 2004 |
|
RU2276216C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РОВНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНЫХ ДОРОГ | 2023 |
|
RU2820228C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| ПОДВИЖНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2572094C1 |
| СПОСОБ ВИЗУАЛЬНОЙ ЛОКАЛИЗАЦИИ ГОРОДСКОГО РЕЛЬСОВОГО ТРАНСПОРТА НА ОСНОВЕ ФИЛЬТРОВ ЧАСТИЦ КАЛМАНА И ДАННЫХ О КАРТИРОВАНИИ | 2023 |
|
RU2807978C1 |
| СПОСОБ ИНЕРЦИАЛЬНЫХ ИЗМЕРЕНИЙ НЕРОВНОСТЕЙ РЕЛЬСОВОГО ПУТИ | 2002 |
|
RU2242391C2 |
| МАЛОГАБАРИТНАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ, КОРРЕКТИРУЕМАЯ ОТ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ | 2012 |
|
RU2502049C1 |
| СПОСОБ КОРРЕКЦИИ ДАТЧИКА ПРОЙДЕННОЙ ДИСТАНЦИИ | 2003 |
|
RU2243505C1 |
Изобретение относится к области диагностики железнодорожного пути. Устройство для контроля положения рельсового пути в горизонтальной плоскости согласно изобретению содержит вычислительный блок, в состав которого входят два блока пересчета координат, две линии задержки на 12,5 метров, две линии задержки на 17 метров, линию задержки на 50 метров, сумматор и блок нормировки. Инерциальная навигационная система и оптические датчики жестко механически связаны. Каждый оптический датчик, инерциальная навигационная система и одометр соединены с входами вычислительного блока таким образом, что оптические датчики соединены с первыми входами соответствующих блоков пересчета координат, вторые входы блоков пересчета координат также соединены с инерциальной навигационной системой, выход каждого из блоков пересчета координат соединен с первыми входами двух линий задержки (на 12,5 и на 17 метров), вторые входы этих линий задержки также соединены с одометром, выходы этих линий задержки и блоков пересчета координат являются выходами вычислительного блока и соединены с входами блоков расчета горизонтальных неровностей рельса, инерциальная навигационная система соединена с первым входом линии задержки (на 50 метров), второй вход которой также соединен с одометром, а выход которой соединен с положительным входом сумматора, отрицательный вход сумматора соединен с инерциальной навигационной системой, выход сумматора соединен с блоком нормировки, выход которого является выходом вычислительного блока и вместе с выходами блоков расчета горизонтальных неровностей является выходами устройства в целом. В результате уменьшены массогабаритные характеристики устройства. 2 ил.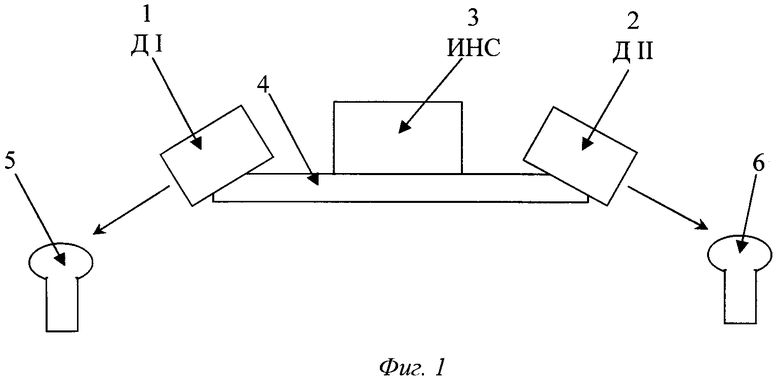
Устройство для контроля положения рельсового пути в горизонтальной плоскости, содержащее одометр, инерциальную навигационную систему, два оптических датчика, направленных на внутренние части головок соответствующих рельсов, и два блока расчета горизонтальных неровностей, отличающееся тем, что оно дополнительно содержит вычислительный блок, в состав которого входят два блока пересчета координат, две линии задержки на 12,5 метров, две линии задержки на 17 метров, линию задержки на 50 метров, сумматор и блок нормировки, инерциальная навигационная система и оптические датчики жестко механически связаны, каждый оптический датчик, инерциальная навигационная система и одометр соединены с входами вычислительного блока таким образом, что оптические датчики соединены с первыми входами соответствующих блоков пересчета координат, вторые входы блоков пересчета координат также соединены с инерциальной навигационной системой, выход каждого из блоков пересчета координат соединен с первыми входами двух линий задержки (на 12,5 и на 17 метров), вторые входы этих линий задержки также соединены с одометром, выходы этих линий задержки и блоков пересчета координат являются выходами вычислительного блока и соединены с входами блоков расчета горизонтальных неровностей рельса, инерциальная навигационная система соединена с первым входом линии задержки (на 50 метров), второй вход которой также соединен с одометром, а выход которой соединен с положительным входом сумматора, отрицательный вход сумматора соединен с инерциальной навигационной системой, выход сумматора соединен с блоком нормировки, выход которого является выходом вычислительного блока и вместе с выходами блоков расчета горизонтальных неровностей является выходами устройства в целом.
| Вращательная цементо-обжигательная печь | 1928 |
|
SU9855A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2387561C1 |
| УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОГО КОНТРОЛЯ РЕЛЬСОВОЙ КОЛЕИ ПРИ ДВИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2248424C2 |
| US 4181430 A, 01.01.1980 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

