Изобретение относится к области радиоизмерений и предназначено для выполнения антенных измерений (построение диаграммы направленности, измерение коэффициента направленного действия, определение поляризации радиоизлучающих систем, юстировка электрической оси узконаправленной антенны, калибровка радиолокационной станции - РЛС), а также исследований электромагнитной обстановки.
На практике широко применяются три основных метода антенных измерений (Александров А.И., Бобровник Г.А., Еременко А.С. и др. «Эксплуатация радиотехнических комплексов», под ред. А.И. Александрова. М. Советское радио. 1976. 280 с.; «Методы измерения характеристик антенн СВЧ», Л.Н. Захарьев, А.А. Леманский, В.И. Турчин и др., под ред. Н.М. Цейтлина. М. Радио и связь. 1985. 368 с): метод поля в ближней зоне (апертурно-зондовый), метод вышки в дальней зоне и облетный метод.
Измерения методом поля в ближней зоне выполняются на стенде, в условиях безэховой камеры. Однако, после монтажа антенны на объект, установки и закрытия ее радиопрозрачным обтекателем, результаты стендовых измерений теряют актуальность, а повторные обмеры могут быть получены уже только другими методами.
Метод вышки является наиболее распространенным методом антенных измерений из-за простоты реализации, стабильности и надежности результатов измерений. Но ограниченная высота вышки практически позволяет выполнять измерения только при малых углах места исследуемой антенны, из-за чего на результаты оказывают влияние отражения от земной поверхности и местных предметов. Кроме того, в ряде случаев не всегда возможна постройка специальной вышки на расстоянии дальней зоны антенны.
Облетный метод измерений заключается в том, что пилотируемый летательный аппарат (ЛА) или беспилотный летательный аппарат (БПЛА) с измерительной аппаратурой на борту совершает круговой облет исследуемой антенны с постоянными на каждом проходе высотой, набором или потерей высоты, а также радиусом.
Использование пилотируемых ЛА для облетных антенных измерений является технически сложным и дорогостоящим («Методы измерения характеристик антенн СВЧ», Л.Н. Захарьев, А.А. Леманский, В.И. Турчин и др. Под ред. Н.М. Цейтлина. М. Радио и связь. 1985. 368 с.). Кроме того, при использовании пилотируемого ЛА должна быть обеспечена безопасность полета.
Несмотря на высокую безопасность и меньшие затраты при выполнении антенных измерений с помощью БПЛА, управляемых дистанционно оператором или выполняющих круговой облет в автоматическом режиме, этот способ имеет ряд недостатков, связанных с необходимостью использования командной радиолинии управления, информации глобальных навигационных спутниковых систем (ГНСС) для позиционирования, а также доработкой конструкции БПЛА.
Аналогом изобретения является способ измерения параметров направленности крупноапертурной антенны с помощью БПЛА методом облета (RU пат. №2626561 «Способ измерения параметров направленности антенны с помощью БПЛА методом облета»), в котором для полной автоматизации процесса, а также повышения точности, сокращения времени и снижения затрат, используется БПЛА (коптерного, самолетного или иного типа) с измерительной аппаратурой на борту, совершающий круговые облеты исследуемой антенны, вдоль маршрута, представляющего собой сечения сферы с радиусом, превышающим расстояние, удовлетворяющее условию дальней зоны исследуемой антенны, в полностью автоматическом режиме. Для определения координат БПЛА используются данные ГНСС (ГЛОНАСС, GPS и т.п.), а дополнительная точность обеспечивается за счет внесения полученных от контрольно-корректирующей станции (ККС) дифференциальных поправок в результат измерений при постобработке данных.
Недостатком аналога является зависимость от доступности сигнала ГНСС и поправок ККС, используемых для позиционирования БПЛА во время проведения антенных измерений.
Известен способ калибровки РЛС с применением сферических отражателей, подвешенных к привязному аэростату (Hilgerloh G., Caprano Т., Griebeler Е.М. ((Calibrating the Operational Beam Width and Maximum Range of a Ship Radar Used for Bird Observations)), The Journal of Navigation, 2010, vol. 63,pp. 363-371. DOI: 10.1017/S0373463309990452).
Недостатками аналога являются ограниченность выполнения антенных измерений из-за отсутствия на аэростате радиоизмерительной аппаратуры, отсутствие средств контроля за положением аэростата относительно исследуемой антенны, которое может изменятся из-за ветровых нагрузок.
Известна также система измерения параметров направленности крупноапертурной антенны в дальней зоне (RU пат.№2746688 «Система измерений электрических параметров больших антенных систем»), отличающаяся тем, что предназначенный для измерения электрических параметров больших антенных систем источник эталонного радиосигнала расположен в дальней зоне на управляемом аэростате, оснащенном средствами позиционирования (ГНСС-приемником и логгером, определяющими географические координаты и высоту положения аэростата), при этом источник эталонного радиосигнала и средства позиционирования связаны через кабель управления с расположенными на земле блоками питания и управления аэростата.
Данное изобретение по технической сущности и достигаемому результату наиболее близко к предложенному техническому решению, и, поэтому, принято в качестве его прототипа.
Известная система предназначена для измерения электрических параметров больших антенных систем с диаметром рефлектора более 20 м, путем размещения источника эталонного радиосигнала на внешней подвеске привязного аэростата, который может быть доставлен в любое заданное место и поднят на необходимую высоту. Место расположения привязного аэростата относительно которого и будут выполняться измерения электрических параметров большой антенной системы выбирают исходя из диаметра апертуры антенны. Точность позиционирования аэростата и, соответственно, эталонного радиопередатчика, обеспечивается путем использования на нем ГНСС-приемника с расположенными на земле блоками питания и управления. Можно применить точный приемник спутниковой системы позиционирования совместно с логгером, что позволяет определить местоположение источника эталонного радиосигнала в трех координатах с точностью до одного метра, что вполне достаточно для выполнения антенных измерений.
Недостатком указанного прототипа является необходимость использования кабеля связи для управления аэростатом с источником эталонного радиосигнала, и обязательное наличие навигационного сигнала ГНСС.
Задачей разработки является создание способа и системы антенных измерений, позволяющих отказаться от данных ГНСС и дифференциальных поправок от ККС для позиционирования привязного аэростата.
Решением поставленной задачи является способ антенных измерений, при котором в дальней зоне исследуемой антенны, связанной с блоком синхронизации, устанавливается беспилотный привязной аэростат с подвесным контейнером, в котором находится радиоизмерительный блок, жестко связанный с блоком оптических реперов, а на поверхности под беспилотным привязным аэростатом размещаются оптическое измерительное устройство и блок приема синхросигнала, при этом относительные координаты местоположения оптического измерительного устройства привязаны к фазовому или геометрическому центру исследуемой антенны.
Особенность представленной системы антенных измерений заключается в том, что в дальней зоне исследуемой антенны, связанной с блоком синхронизации, размещается беспилотный привязной аэростат с подвесным контейнером, в котором расположен радиоизмерительный блок, бортовой таймер, координатный блок, микроконтроллер, бортовое запоминающее устройство, блок оптических реперов, бортовой аккумулятор, а находящееся на земной поверхности под привязным аэростатом оптическое измерительное устройство связано с блоком управления, блоком приема синхросигнала, наземным таймером, съемным носителем информации и источником питания.
В составе блока оптических реперов находится не менее трех оптических излучающих устройств (реперов) с источником питания, которые разнесены на базовые расстояния с известными длинами. Точность базовых расстояний, определяемая длиной между геометрическими центрами посадочных, мест реперов, должна позволять определять в пространстве положение реперов оптическим измерительным устройством с приемлемой погрешностью. Ширина диаграммы и мощность излучения реперов обеспечивают видимость репера как точечного источника оптического излучения с учетом перемещений и разворотов подвесного контейнера. В качестве оптических реперов могут быть использованы лазерные диоды, светоизлучающие диоды или другие источники оптического излучения.
Беспилотный привязной аэростат может иметь различное количество тросов, прикрепленных к барабану лебедки стационарных или подвижных причалов, в зависимости от ветровых нагрузок и необходимости проведения антенных измерений под их воздействием.
Оптическое измерительное устройство, расположенное на поверхности земли под беспилотным привязным аэростатом, представляет собой телекамеру с матричным фотоприемным устройством (МФПУ) на базе ПЗС (прибора с зарядовой связью) или КМОП (комплементарный металл - оксидный полупроводник) фотоприемника и узкополосным оптическим фильтром, согласованным со спектральным диапазоном излучения оптических реперов, установленных на подвесном контейнере привязного аэростата. Оптическое измерительное устройство должно располагаться под беспилотным привязным аэростатом таким образом, чтобы он при наличии ветровых нагрузок оставался в поле зрения МФПУ. Угловое разрешение МФПУ позволяет с приемлемой погрешностью определять положение блока оптических реперов.
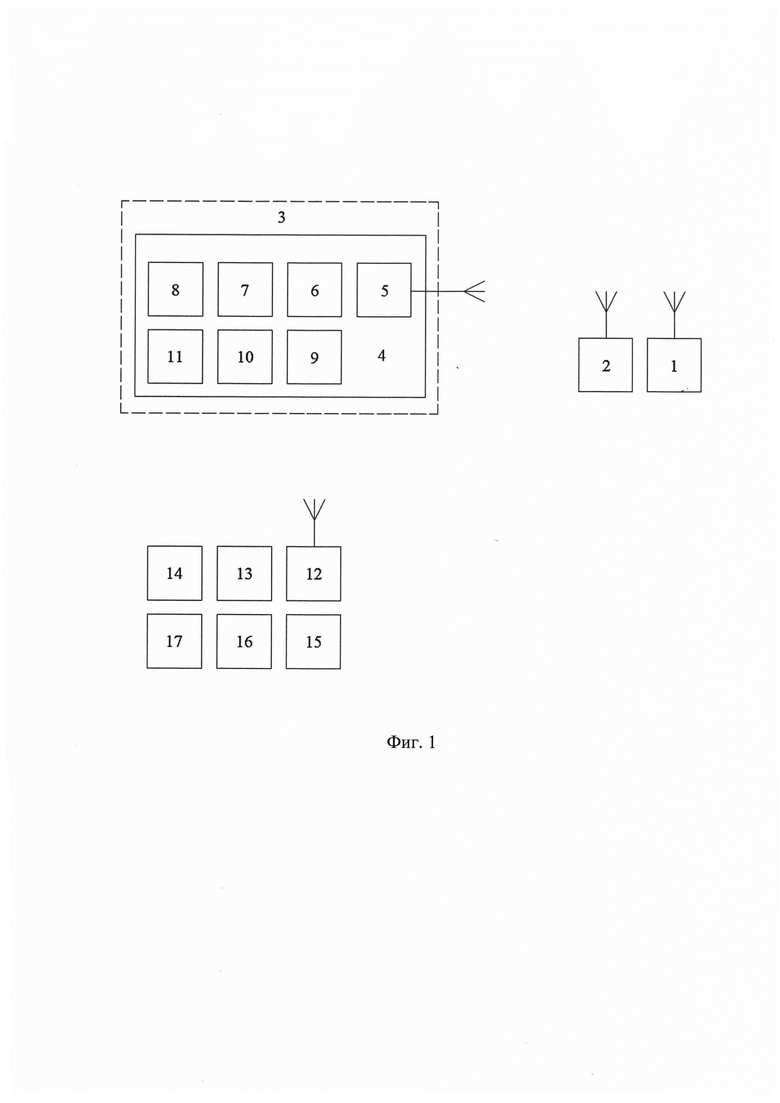
На фиг. 1 представлена структурная схема системы антенных измерений, где: 1 - исследуемая антенна; 2 - блок синхронизации; 3 - беспилотный привязной аэростат; 4 - подвесной контейнер; 5 - радиоизмерительный блок; 6 - бортовой таймер; 7 - координатный блок; 8 - микроконтроллер; 9 - бортовое запоминающее устройство; 10 - блок оптических реперов; 11 - бортовой аккумулятор; 12 - блок приема синхросигнала; 13 - оптическое измерительное устройство; 14 - наземный таймер; 15 - блок управления; 16 - съемный носитель информации; 17 - источник питания.
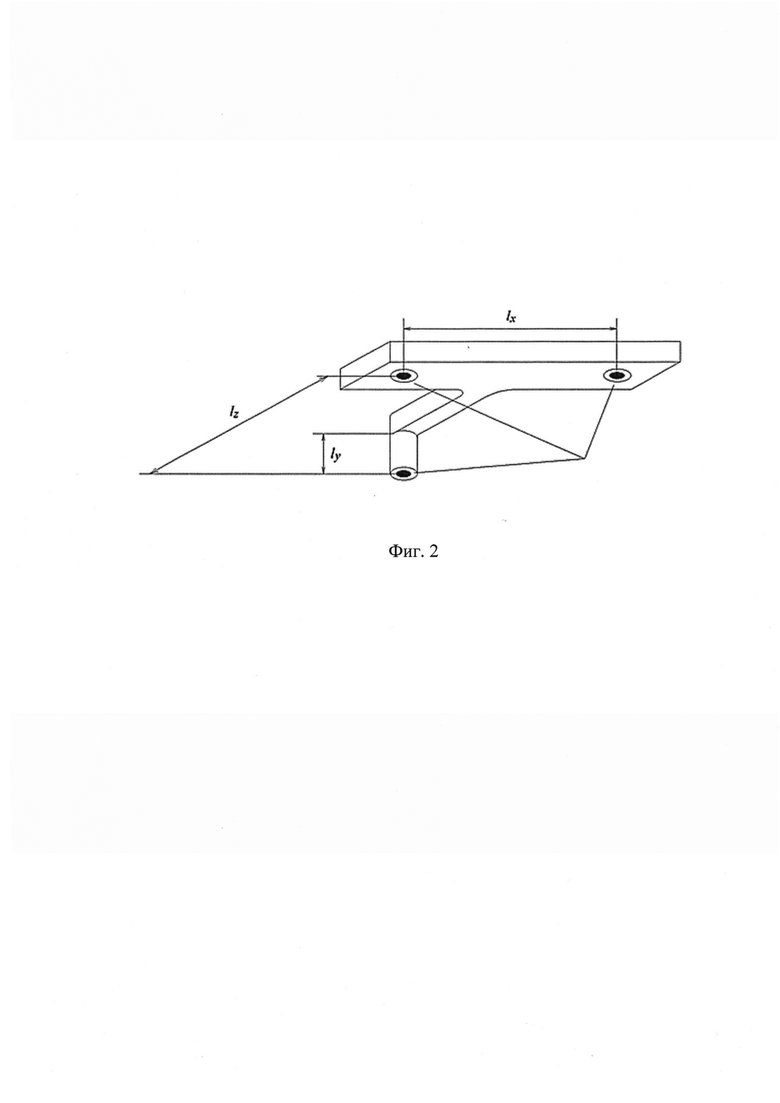
На фиг. 2 показан блок оптических реперов, предназначенный для определения положения подвесного контейнера беспилотного привязного аэростата относительно оптического измерительного устройства и, следовательно, взаимного положения радиоизмерительного блока и исследуемой антенны.
Определение антенных характеристик осуществляется следующим образом. Перед началом антенных измерений выполняется топогеодезическая подготовка, а именно определение координат и взаимная привязка оптического измерительного устройства 13 и исследуемой антенны 1 с использованием ГНСС-приемника, геодезических методов или иным путем, обеспечивающим допустимую погрешность измерений. Затем осуществляется подъем беспилотного привязного аэростата 3 с подвесным контейнером 4, в котором находится радиоизмерительный блок 5, бортовой таймер 6 для определения времени измерений, координатный блок 7, который измеряет высоту подъема и выполняет предварительную оценку ориентации подвесного контейнера в пространстве, привязка этих данных к результатам и времени антенных измерений производится микроконтроллером 8, который также осуществляет запись сформированного массива данных в бортовое запоминающее устройство 9. Электропитание всех устройств, находящихся в подвесном контейнере 3, обеспечивается бортовым аккумулятором 11. Оптическое измерительное устройство 13 по изображению блока оптических реперов 10 определяет положение подвесного контейнера 4 в пространстве и фиксирует его в заданный момент времени путем записи данных, обработанных блоком управления 15, на съемный носитель информации 16. Синхронизация информации, записанной в бортовом запоминающем устройстве 9 подвесного контейнера 4, с измерениями положения беспилотного привязного аэростата 3, выполняемыми оптическим измерительным устройством 13, осуществляется посредством блока приема синхросигнала 12, фиксирующим момент радиоизлучения исследуемой антенны 1, блока синхронизации 2 или эталонного радиосигнала радиоизмерительного блока 5. В блоке управления 15 с использованием наземного таймера 14 осуществляется привязка по времени излучения и положения радиоизмерительного блока 5 в подвесном контейнере 4 беспилотного привязного аэростата 3 относительно исследуемой антенны 1 с последующей записью на съемный носитель информации 16. Электропитание блоков 12-16 осуществляется посредством источника питания 17. После окончания измерений с исследуемой антенны 1 и блока синхронизации 2 снимают излучение, привязной аэростат 3 спускают, из контейнера 4 извлекают бортовое запоминающее устройство 9. Затем производится обработка данных, записанных на съемном носителе информации 16 и зафиксированных бортовым запоминающим устройством 9.
Координатный блок, находящийся в подвесном контейнере, выполнен на базе барометрического высотомера. Возможен вариант исполнения координатного блока, в котором дополнительно установлены инерциальный датчик и/или магнитометр (цифровой компас), позволяющие улучшить предварительную оценку ориентации подвесного контейнера.
Возможен вариант синхронизации информации, записанной в бортовом запоминающем устройстве подвесного контейнера с измерениями положения беспилотного привязного аэростата, выполняемыми оптическим измерительным устройством, путем модуляции по определенному закону излучения оптических реперов.
Возможен вариант синхронизации момента излучения исследуемой антенны с измерениями положения беспилотного привязного аэростата, выполняемыми оптическим измерительным устройством, с использованием оптической связи (атмосферной линии связи или волоконно-оптического кабеля) между блоком синхронизации, в котором находится источник оптического излучения (например, лазер) и блоком приема синхросигнала, в котором установлен фотоприемник.
Возможен вариант использования в качестве оптического измерительного устройства лазерного локатора (т.н. лидара) с соответствующим разрешением по дальности и угловым координатам, при этом в блоке оптических реперов должны быть размещены оптические уголковые отражатели (триппель-призмы).
При наличии сигнала ГНСС в качестве наземного таймера и бортового таймера в подвесном контейнере беспилотного привязного аэростата могут быть применены ГНСС-приемники, которые также могут быть использованы для получения предварительной оценки взаимной ориентации подвесного контейнера привязного аэростата и оптического измерительного устройства. При отсутствии сигналов ГНСС возможно использование навигационных приемников локальной радионавигационной системы (Корнеев И. Л., Кузнецов А.С., Королев B.C. «Режимы работы локальной системы навигации в проекте «КОНСУЛ». Потребители системы «КОНСУЛ», Наноиндустрия. Спецвыпуск. 2021. 7s. Т. 14 (107). С. 57-59.) или современных вариантов радионавигационных систем НЧ-диапазона типа «Чайка», LORAN (Ююкин И.В. «Навигационное использование системы e-LORAN в модификации с методом сплайн-функций». Вестник Государственного университета морского и речного флота имени адмирала СО. Макарова. 2020. Т. 12. №4. С. 703-715. DOI: 10.21821/2309-5180-2020-12-4-703-715).
Расстояние до блока оптических реперов и его ориентация определяются угломерно-триангуляционным способом, путем измерения наблюдаемых размеров базовых расстояний между реперами, которые известным образом ориентированы в системе координат подвесного контейнера беспилотного привязного аэростата. Необходимо не менее трех реперов, два из которых находятся в одной плоскости (первая база), а третий несколько сдвинут относительно нее (вторая база) (Федосеев В.И. «Автоматическая лазерная система контроля параметров сближения кооперируемых космических аппаратов», Оптический журнал. 1996. №7. С. 66-70).
Определение ориентации блока оптических реперов осуществляется по методике, аналогичной представленной в (Бачевский С.В. «Точность определения дальности и ориентации объекта методом пропорций в матричных телевизионных системах», Вопросы радиоэлектроники. Сер. Техника телевидения. 2010 г. Вып. 1. С. 57-66; Бахшиев А.В., Корбан П.А., Кирпань Н.А. «Программный комплекс определения пространственной ориентации объектов по телевизионному изображению», Робототехника и техническая кибернетика. 2013. №1. С. 71-75.).
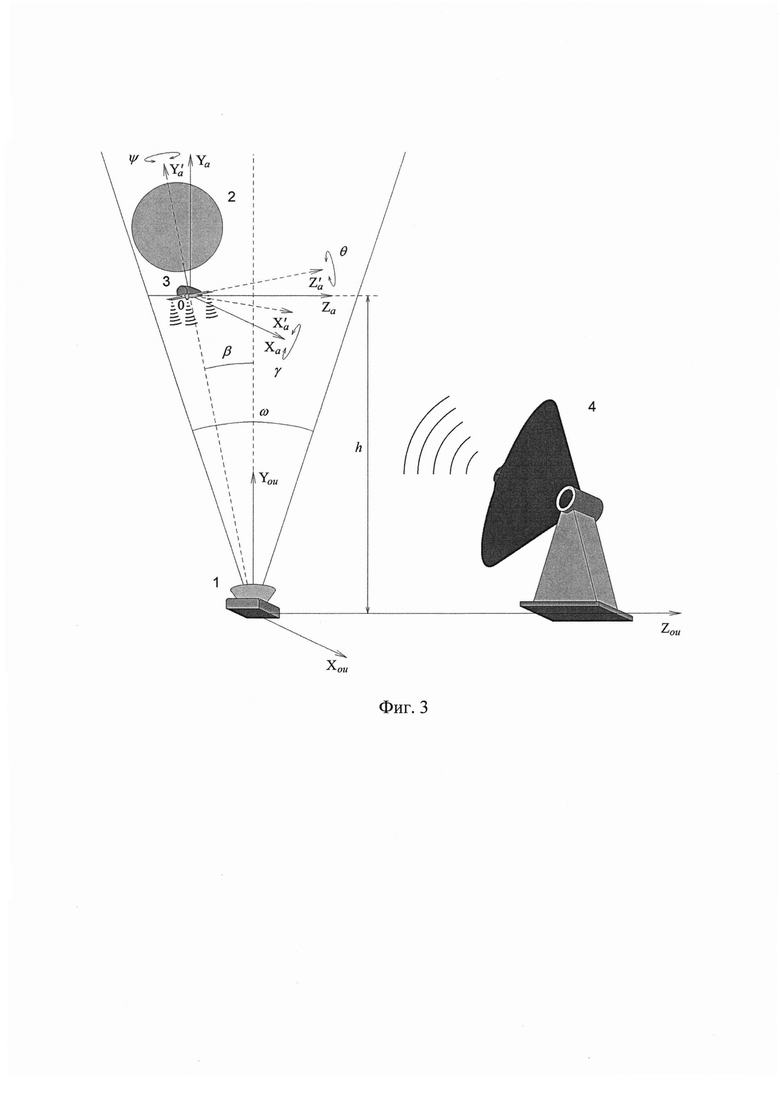
Как показано на фиг. 3, оптическое измерительное устройство 1 размещается таким образом, что его оптическая ось направлена в зенит, при этом выполняется условие, что поднятый на высоту h беспилотный привязной аэростат 2 при отсутствии ветра находится на оптической оси или вблизи нее. При этом оси «YОИ» и «YA» систем координат оптического измерительного устройства ХОИYОИZОИ и беспилотного привязного аэростата XAYAZA совпадают.
Когда на аэростат с одним привязным тросом действует сила ветра, то он опускается на угол β по линии окружности, образованной длиной троса до момента достижения механического равновесия приложенных к нему сил и противодействующих сил реакции, образующих равнодействующую реакцию силы связи. При ослаблении силы ветра аэростат стремится занять исходное положение, что приводит к неравномерным колебаниям подвесного контейнера. Подвесной контейнер привязного аэростата перемещается в горизонтальном и вертикальном направлении, а также испытывает кручение вокруг вертикальной оси и маятниковое качание (Катушков В.А. «Исследование смаза изображения при фотографировании с аэростата», Геодезия, картография и аэрофотосъемка. 1980. Т. 31. №31. С. 130-134.).
В результате, при развороте подвесного контейнера, оптические реперы принимают положение, отличное от исходного. При известном расстоянии, равном высоте подъема h, изменение их положения позволяет определить величину углов тангажа θ, крена γ и рысканья ψ, на которые развернулся подвесной контейнер с радиоизмерительным блоком. Таким образом определяется ориентация радиоизмерительного блока относительно исследуемой антенны 4.
Углы тангажа θ, крена γ и рысканья ψ вычисляются по выражениям

Где  - проекции базовых расстояний между двумя реперами в плоскости МФПУ по осям «ZОИ», «ХОИ»; х - проекция наблюдаемого изображения базового расстояния
- проекции базовых расстояний между двумя реперами в плоскости МФПУ по осям «ZОИ», «ХОИ»; х - проекция наблюдаемого изображения базового расстояния  между двумя реперами в плоскости МФПУ по оси «ХОИ»; z1, z2 - проекции изображений базовых расстояний
между двумя реперами в плоскости МФПУ по оси «ХОИ»; z1, z2 - проекции изображений базовых расстояний  по оси «ZОИ».
по оси «ZОИ».
Если один из реперов смещен по оси «Za» на базу  и на базу
и на базу  относительно двух других реперов, то выражения (1) и (2) дополняются следующими соотношениями
относительно двух других реперов, то выражения (1) и (2) дополняются следующими соотношениями

Из-за возрастания с расстоянием погрешности угломерных измерений дальности по базовому расстоянию менее 1,0 м для определения высоты подъема беспилотного привязного аэростата целесообразно использовать барометрический высотомер, имеющий погрешность измерений в пределах 0,1…0,5 м.
В качестве примера рассмотрим определение координат и ориентации блока оптических реперов с базовыми расстояниями в перпендикулярных направлениях 50 см, установленного на подвесном контейнере беспилотного привязного аэростата, поднятого на высоту h = 300 м. Принимаем, что в оптическом измерительном устройстве используется МФПУ с разрешением 7680×4320 пикселей (33 Мп), при этом максимальный угол обзора составляет 10°.
Если ошибка не превышает один пиксель МФПУ, то погрешность измерения перемещения беспилотного привязного аэростата с подвесным контейнером в горизонтальной плоскости составит 0,7 см, что более чем на порядок меньше погрешности при использовании ГНСС-приемника. Погрешность измерений углов тангажа и крена не превысит Δθ=Δγ=1,6°, а для угла рысканья составит не более Δψ=0,8°.
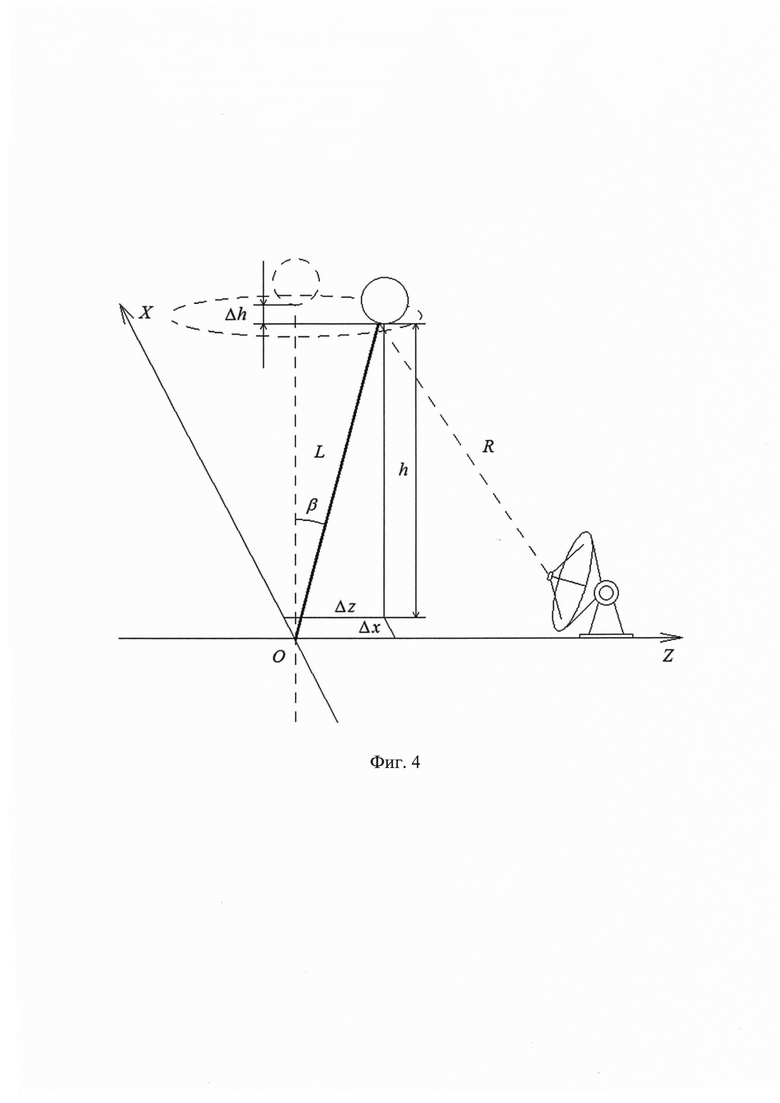
Высота беспилотного привязного аэростата фиксируется барометрическим высотомером в момент приема радиоизмерительным блоком излучения исследуемой антенны, либо наоборот, в момент излучения эталонного радиосигнала радиоизмерительным блоком. Если радиоизмерительный блок включает в себя только радиолокационный отражатель, используемый для калибровки РЛС, то высота подъема может быть определена через угол отклонения β от нормали к оптической оси оптического измерительного устройства (см. фиг. 4)

где L - длина привязного троса.
В состав радиоизмерительного блока в зависимости от выполняемой задачи могут входить радиолокационный отражатель, высокочувствительный приемник радиосигнала с необходимым динамическим диапазоном, генератор эталонного радиосигнала, антенно-фидерные устройства, запоминающее устройство, источники питания. Результаты измерений, полученные с использованием вышеуказанных устройств, автоматически записываются в бортовое запоминающее устройство. Управление излучением эталонного радиосигнала осуществляется программным способом либо осуществляется дистанционно оператором с наземного пункта управления. В последнем случае в составе радиоизмерительного блока должна быть предусмотрена радиолиния (или оптическая атмосферная линия связи) для управления режимом излучения.
Наиболее предпочтительным типом беспилотного привязного аэростата является шар-баллон (метеорологический зонд) как недорогой и простой в эксплуатации.
Достигаемый технический результат согласно предложенному решению - проведение радиоизмерений при отсутствии сигнала ГНСС, отсутствии дифференциальных поправок от ККС, повышение помехозащищенности и снижение погрешности антенных измерений с одновременным снижением стоимости работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля диаграммы направленности антенны облетным методом с помощью БПЛА | 2022 |
|
RU2836791C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| Способ определения координат и углов положения осей подвижных объектов с помощью атомных часов, установленных на объектах и в пунктах наблюдения | 2017 |
|
RU2678371C2 |
| Способ выявления факта передачи данных с летательного аппарата через спутниковый ретранслятор | 2023 |
|
RU2829214C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК НАПРАВЛЕННОСТИ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ В ЗОНЕ ФРЕНЕЛЯ С ПОМОЩЬЮ БЕСПИЛОТНОЙ АВИАЦИОННОЙ СИСТЕМЫ | 2022 |
|
RU2797461C1 |
| Способ противодействия летательным аппаратам, использующим спутниковый канал для передачи информации | 2023 |
|
RU2829314C1 |
| Способ создания высокоточного, защищенного координатного поля в целях обеспечения условий для эффективного выполнения задач как при отсутствии и так при наличии сигналов ГНСС. | 2024 |
|
RU2839049C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОРИЕНТАЦИИ БОРТОВОЙ АНТЕННЫ БЕСПИЛОТНОГО КОМПЛЕКСА ДЛЯ ИЗМЕРЕНИЙ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕНН | 2019 |
|
RU2704393C1 |
| Устройство измерения параметров радиосигналов пространственно-распределенной системы радиопередатчиков с использованием беспилотного летательного аппарата | 2024 |
|
RU2818013C1 |
| Устройство измерения параметров радиосигналов пространственно-распределенной системы радиопередатчиков с использованием беспилотного летательного аппарата | 2024 |
|
RU2818856C1 |
Изобретение относится к области радиоизмерений и предназначено для определения антенных характеристик и калибровки РЛС, а также исследования электромагнитной обстановки. Предложены способ и система антенных измерений, позволяющие определять антенные характеристики при отсутствии сигнала ГНСС и дифференциальных поправок от ККС, для чего в дальней зоне исследуемой антенны, связанной с блоком синхронизации, устанавливается беспилотный привязной аэростат с подвесным контейнером, в котором находятся радиоизмерительный блок, жестко связанный с блоком оптических реперов, координатный блок, а также бортовое запоминающее устройство. На поверхности земли под беспилотным привязным аэростатом размещаются оптическое измерительное устройство, блок приема синхросигнала и съемный носитель информации. Оптическое измерительное устройство привязано к фазовому или геометрическому центру исследуемой антенны. Техническим результатом при реализации заявленной группы изобретений является проведение радиоизмерений при отсутствии сигнала ГНСС, отсутствии дифференциальных поправок от ККС, повышение помехозащищенности и снижение погрешности антенных измерений с одновременным снижением стоимости работ. 2 н. и 1 з.п. ф-лы, 4 ил.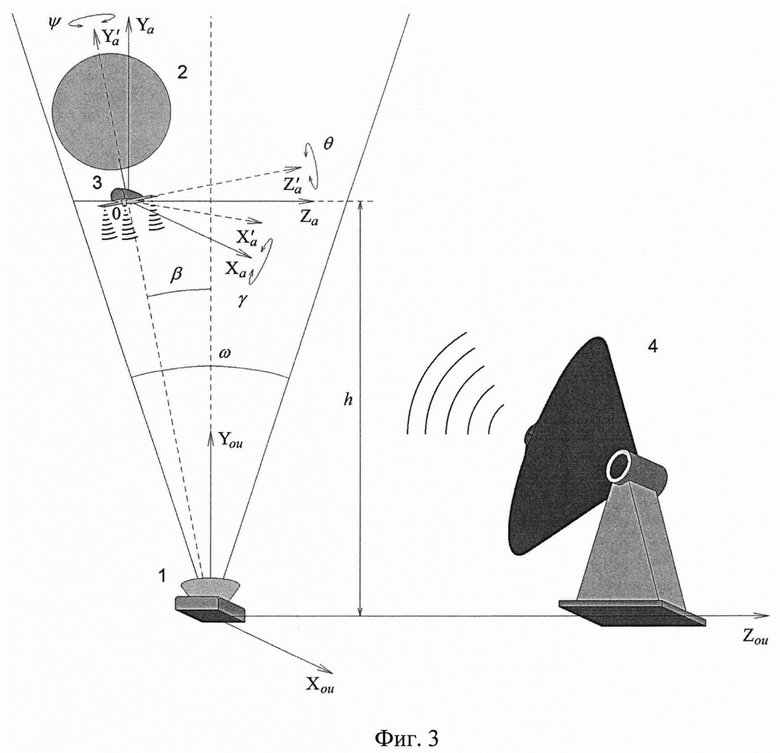
1. Способ антенных измерений с использованием беспилотного привязного аэростата, отличающийся тем, что в дальней зоне исследуемой антенны, связанной с блоком синхронизации, устанавливается беспилотный привязной аэростат с подвесным контейнером, в котором находятся радиоизмерительный блок и координатный блок, жестко связанные с блоком оптических реперов, на поверхности земли под беспилотным привязным аэростатом размещается оптическое измерительное устройство, координаты которого привязаны к фазовому или геометрическому центру исследуемой антенны, оптическое измерительное устройство по изображению блока оптических реперов определяет положение подвесного контейнера в пространстве, синхронизация данных, полученных радиоизмерительным блоком в подвесном контейнере с положением и ориентацией привязного беспилотного аэростата, осуществляется посредством фиксации момента излучения исследуемой антенны или по сигналу от блока синхронизации, либо по эталонному сигналу радиоизмерительного блока, а получение окончательных результатов измерений обеспечивается путем обработки массива измеренных данных радиоизмерительного блока, координатного блока и оптического измерительного устройства, привязанных к сигналам синхронизации и топогеодезическим данным.
2. Способ антенных измерений с использованием беспилотного привязного аэростата по п. 1, отличающийся тем, что для синхронизации массива данных радиоизмерительного блока с положением привязного беспилотного аэростата относительно оптического измерительного устройства в блоке оптических реперов применяется модуляция источника излучения по определенному закону.
3. Система для антенных измерений с использованием беспилотного привязного аэростата по способу антенных измерений с использованием беспилотного привязного аэростата по п. 1, включающая исследуемую антенну, связанный с ней блок синхронизации, размещенный в дальней зоне исследуемой антенны беспилотный привязной аэростат с подвесным контейнером, в котором расположен радиоизмерительный блок, бортовой таймер, координатный блок, микроконтроллер, бортовое запоминающее устройство, блок оптических реперов, бортовой аккумулятор, находящееся на поверхности земли под привязным аэростатом оптическое измерительное устройство, связанное с блоком управления, блоком приема синхросигнала, наземным таймером, съемным носителем информации и источником питания.
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| ПРИВЯЗНОЙ АЭРОСТАТ | 2020 |
|
RU2731789C1 |
| Система измерения электрических параметров больших антенных систем | 2020 |
|
RU2746688C1 |
| US 10067172 B1, 04.09.2018 | |||
| US 11313893 B2, 26.04.2022 | |||
| CN 209097006 U, 12.07.2019 | |||
| US 20140012433 A1, 09.01.2014. | |||

