Изобретение относится к способам обработки данных внутритрубных дефектоскопов, а именно к способу оценки геометрических размеров дефектов стенки трубной секции и сварных швов по данным магнитного внутритрубного дефектоскопа с помощью универсальной нейросетевой модели, подходящей для дефектоскопов с различными диаметрами и магнитными системами, и может быть использовано для оценки длины, ширины и глубины дефекта типа «потеря металла».
Известна система интерпретации данных внутритрубного обследования трубопроводов (варианты) (RU 27708 U1, МПК G01N 27/72, G01M 3/00, G01N 29/00, приоритет 13.08.2002), включающая в себя накопитель цифровых данных внутритрубного обследования трубопроводов, вычислительную систему, включающую в себя средства совмещения или сравнения данных от электромагнито-акустических или иных ультразвуковых датчиков ультразвукового обследование, с данными ультразвукового обследования с данными магнитного обследования трубопровода.
Известен способ автоматизированного неразрушающего контроля качества труб и устройство для его осуществления (RU 2351925 С1, МПК G01N 29/04, G01N 27/90, G01N 27/83, приоритет 17.07.2007), заключающийся в излучении преобразователями ультразвуковых импульсных колебаний, приеме, усилении и регистрации отраженных эхо-импульсных колебаний, отличающийся тем, что при наличии акустического контакта с трубой и отраженных эхо-импульсных сигналов от дефектов последние принимаются преобразователями, расположенными вдоль трубы, преобразуются в коды, которые селектируются по временным параметрам, параметру амплитуды (фазы), логически суммируются и сравниваются с браковочными критериями, при этом в процессе контроля излучаются одновременно поперечные и продольные ультразвуковые колебания и вихретоковые (магнитные) колебания.
Известен способ внутритрубной диагностики (RU 2169308 С1, МПК F17D 5/02, приоритет 02.12.1999), включающий определение дефектов ультразвуковым методом, определение дефектов методом магнитных истечений, совмещение и дополнение и результатов исследований в процессе анализа полученных данных, отличающийся тем, что дополнительно производят исследование стенки трубопровода магнитооптическим способом, результаты которого сопоставляют с результатами исследований ультразвуковым методом и методом магнитных истечений.
Способ магнитной дефектоскопии протяженных тонкостенных ферромагнитных объектов (RU 2133032 С1, МПК G01N 27/83, G01N 27/87, приоритет 20.03.1997), отличающийся тем, что обработку выходных сигналов звеньев преобразователя и формирование сигналов наличия дефектов производят путем формирования опорного сигнала, равного среднему значению выходных сигналов всех звеньев преобразователя, умноженному на коэффициент запаса с заранее задаваемым значением, большим единицы, сравнения величины выходных сигналов всех звеньев преобразователя с величиной опорного сигнала и выработки сигнала наличия дефекта в стенке объекта на пути перемещения определенного звена преобразователя при превышении величиной выходного сигнала этого звена величины опорного сигнала.
Способ магнитного контроля (RU 2118816 С1, МПК G01N 27/83, приоритет 06.11.1996), отличающийся тем, что по сигналам с датчиков по линии их расположения, в плоскости, перпендикулярной проверяемой поверхности и направлению распространения трещин, определяют векторную функцию распределения напряженности магнитного поля как совокупность информативных признаков и параметров, таких, как наличие точек с нулевым значением нормальной составляющей напряженности поля или ее производной по оси, параллельной проверяемой поверхности и перпендикулярной вектору скорости перемещения датчиков, изменение знака производных поля по этой оси, максимальное их значение, расстояние между точками, в которых нормальная составляющая напряженности поля равна 0 (Нулю), сравнивают определенную векторную функцию с хранящимися в памяти ЭВМ эталонными векторными функциями, полученными с учетом поля фона, и по результатам сравнения определяют наличие дефекта, а его характеристики вычисляют с использованием зависимостей, введенных в память ЭВМ.
Известен способ обработки и оценки измеренных сигналов в устройстве датчика (US 5898304 «Sensor arrangement including a neural network and detection method using same», МПК G01D 5/20, G01R 27/02, G01D 5/12, G01B 7/06, G01R 33/12, G01B 7/00, H03K 17/945, G06F 19/00, G01N 27/90, H03K 17/94, приоритет 22.09.1994 DE), имеющий сенсорное устройство, состоящее по меньшей мере, из одной измерительной катушкой, по меньшей мере, из одного блока обработки со средствами для обнаружения, обработки и оценки измеренных сигналов; блок оценки источника напряжения и для оценки измеренных сигналов, включая нейронной сети с множество узлов, расположенных на входе в устройство. Способ содержит этапы, на которых исходные значения сравниваются с входящими фактическими значениями и происходит самообучение системы.
Известен метод распознания дефектов (CN 102122351 «lntelligent identification method for pipeline defect on basis of RBF (Radical Basis Function) neural network», МПК G06N 3/02, G06K 9/62, приоритет с 01.03.2011), характеризуется следующими этапами: получение данных MFL, создание нейронной сети, обучение нейронной сети и испытания, использование нейронной сети, способной к обучению и к интеллектуальному трехмерному распознанию дефектов трубопровода по параметрам длины, ширины и глубины дефекта, при этом обучение разделено на два этапа: 70% - обучение (обучающая выборка), 30% - проверка образцов и повторное обучение до сокращения ошибок до 0,001, а также основой для обучения нейронной сети является радиальный алгоритм.
Известен нейронный сетевой метод для интерпретации двухмерных дефектов нефтепроводов (CN 102364501, МПК G06N 3/08, приоритет от 14.09.2011) Э, который состоит из сбора исходных данных для обучающей выборки, определения минимального размера дефектов, построение обучающего алгоритма.
Технический результат заявленного изобретения состоит в том, что создан способ оценки геометрических размеров дефектов стенки трубной секции и сварных швов, а также для оценки длины, ширины и глубины дефекта типа «потеря металла», по данным магнитного внутритрубного дефектоскопа с помощью универсальной нейросетевой модели, подходящей для дефектоскопов с различными диаметрами и магнитными системами.
Технический результат заявленного способа достигается путем создания универсальной нейросетевой модели, при этом сущность способа состоит в распространении сигналов ошибки от выходов нейросети к ее входам, в направлении, обратном прямому распространению сигналов в обычном режиме работы.
Для достижения технического результата заявленного изобретения использованы следующие аппаратные средства:
- внутритрубный инспекционный прибор с магнитной системой;
- рабочая станция с программой - терминалом, предназначенная для выгрузки данных;
- файловый сервер для хранения данных;
- рабочая станция с программой, реализующей способ создания и применения универсальной нейросетевой модели.
- сервер базы данных для хранения результатов применения способа.
В качестве нейросетевой модели используется стандартный многослойный персептрон.
Обучение нейросети происходит с использованием стандартного алгоритма обратного распространения ошибки - метода обучения моногослойного персептрона. Это итеративный градиентный алгоритм, который используется с целью минимизации ошибки работы многослойного персептрона и получение желаемого выхода.
Описание алгоритма обратного распространения ошибки:
1. Инициализировать  маленькими случайными значениями,
маленькими случайными значениями,  =0
=0
2. Повторить для всех d от 1 до m:
2.1. Подать  на вход сети и подсчитать выходы υi каждого узла.
на вход сети и подсчитать выходы υi каждого узла.
2.2. Для всех k ∈ Outputs δk=-ok (1 - оk) (tk - оk)
2.3. Для каждого уровня I, начиная с предпоследнего:
Для каждого узла j уровня I вычислить

2.4. Для каждого ребра сети {i, j}
Δwi,j=αΔwi,j+(1 - α)ηδjoi; wi,j=wi,j+Δwi,j
3. Выдать значение wij
Полученные значения wij и структура полученной нейросети сохраняется в файл для каждой магнитной системы и в дальнейшем используется для применения.
Для создания универсальной нейросетевой модели применен следующий алгоритм:
1. Сбор информации о дефектах с известными геометрическими размерами, полученными с полигонов, а также диагностические данные о дефектах с действующих магистральных трубопроводов, подвергнутых процедуре дополнительного дефектоскопического контроля или измеренные ультразвуковым методом, при этом происходит сбор информации о длине, ширине, глубине, амплитуде, форме сигнала дефекта и используются данные с трубопроводов различных диаметров.
2. Сбор информации об уровне фонового поля для всех имеющихся дефектоскопов и для всех имеющихся толщин стенок трубопроводов, при этом для каждой магнитной системы собирается информация по всем имеющимся диагностическим данным, при этом для каждого пропуска диагностического снаряда строится кривая промагниченности, представляющая собой зависимость локального фонового поля в мТл от толщины стенки в мм.
3. Определение универсальных характеристик дефектов путем обработки сигналов от магнитных датчиков.
3.1. Исходные магнитные данные нуждаются в сглаживании, устраняющем раскалиброванность датчиков, при этом для сглаживания исходных данных применяется медианный фильтр:
 - матрица исходных данных (Т1, Д2 или Т3),
- матрица исходных данных (Т1, Д2 или Т3),
где  - номер датчика,
- номер датчика, - номер скана;
- номер скана;
по исходной матрице вычисляется матрица скользящих медиан:
S={sjj}sij=median(mij-r, ..., mij ..., mij+r),
где r ∈ N - половина ширины скользящего окна;
при этом рассчитывается локальное фоновое поле для каждого скана исходной матрицы М:
LBF=(lbf1, ..., lbfK), где lbfj=median(s1j; ..., sNj);
далее вычисляется матрица сглаженных данных:
 - матрица сглаженных данных,
- матрица сглаженных данных,
 - коэффициент преобразования.
- коэффициент преобразования.
3.2. Поиск дискретной карты дефектов осуществляется на основе матрицы сглаженных данных  и локального фонового поля
и локального фонового поля
LBF=(lbf1, ..., lbfK):
 - дискретная карта дефектов, где
- дискретная карта дефектов, где
k1, k2, k3 - пороговые коэффициенты; при этом значения элементов рij дискретной карты дефектов определяют следующее:
- 3 (Три) - «точка регистрирования дефекта», считается дефектной в любом случае,
- 2 (Два) - «точка области дефекта», считается дефектной, если по точкам с положительными значениями из нее можно придти в точку со значением 3;
- 1 (Один) - «точка объединения дефекта», не является дефектной, но через нее точки со значениями 2 и 3 могут быть объединены в один дефект;
- 0 (Нуль) - «бездефектная точка», не являющаяся дефектной в любом случае.
3.3. Поиск связных областей на дискретной карте дефектов.
Связанные области точек на дискретной карте дефектов Р являются дефектами секций.
Для поиска связанных областей применяется следующий алгоритм:
- Создается карта поиска S={sjj}, - матрица, такой же размерности как и дискретная карта дефектов Р, то есть NxK, все элементы которой изначально равны 0 (Нулю), отмечаются все посещенные в ходе поиска связанных областей точки, чтобы не возвращаться к ним повторно.
- Последовательно перебираются элементы дискретной карты дефектов, пока не находится элемент piojo=3, при этом если такой элемент не найден - это значит, что секция не содержит дефектов, далее к соответствующему элементу в матрице S карты поиска присваивается отличное от 0 (Нуля) значение, чтобы больше к нему не возвращаться, далее перебираются Рikjk, соседние с piojo-o, для которых выполнены два условия: pikjk>0 (условие дефектности) и отсутствие на карте поиска sikjk=0 (точка еще не отмечена на карте поиска). Если выполнены оба условия, то соответствующим элементам также присваиваются отличные от 0 (Нуля) значения и процесс повторяется для новых точек; в результате перебираются и отмечаются на дискретной карте поиска все элементы связанной области, то есть полная область данного дефекта.
- По крайним точкам найденной области со значениями 2 (Два) и 3 (Три) определяются границы и рамки данного дефекта. Далее на дискретной карте дефектов Р ищется следующая точка со значением 3 (Три), которая еще не отмечена на дискретной карте поиска S и так до тех пор, пока не будут перебраны все такие точки и найдены области соответствующих дефектов.
3.4. Расчет входных параметров дефектов и обучение нейросети
Глубина и ширина дефектов по магнитным данным рассчитывается с помощью нейросетевой модели, при этом на вход нейросети подаются следующие параметры:
- фоновое поле дефекта LBFjo по сглаженным данным Т1, где jo - скан максимума дефекта m;
- относительная амплитуда дефекта 
- ширина сигнала wid0.5 на уровне 0.5 Аотн, для определения которой внутри рамки находятся все точки  для которых верно:
для которых верно:
- wid0.5 проекция на ось у расстояния между самой верхней и самой нижней из точек;
-длина сигнала len0.5 на уровне 0.5-Aотн, которая определяется аналогично ширине;
- ширина сигнала-wid0.75 на уровне 0.5-Aотн;
- длина сигнала len0.75 на уровне 0.75 Aотн;
-относительное отклонение ΔLBFотн реального фонового поля LBFjo от найденного магнитной модели LBFwt (для заданной толщины стенки трубы wt);
- рассчитанная по магнитной модели толщина стенки трубопровода wtмод;
- паспортное значение глубины дефекта в мм.
Алгоритм применения универсальной нейросетевой модели:
1. Выделение сигнала дефекта из совокупности магнитных измерений.
2. Вычисление параметров дефектов с применением нейросетевой модели.
Глубина и ширина дефектов, найденных по магнитным данным, рассчитывается с помощью нейронной сетевой модели. Для каждого магнитного дефектоскопа должно быть прописано соответствие с определенной нейронной сетевой моделью, в которой содержатся значения весовых коэффициентов, используемых при расчете параметров дефекта.
Нейровходы, вычисленные при расчете входных параметров дефектов, линейно отображенные на отрезок [-1; 1] и умноженные на соответствующие коэффициенты, значения которых заданы в загруженной нейронной сетевой модели, подаются на нейроны скрытого слоя.
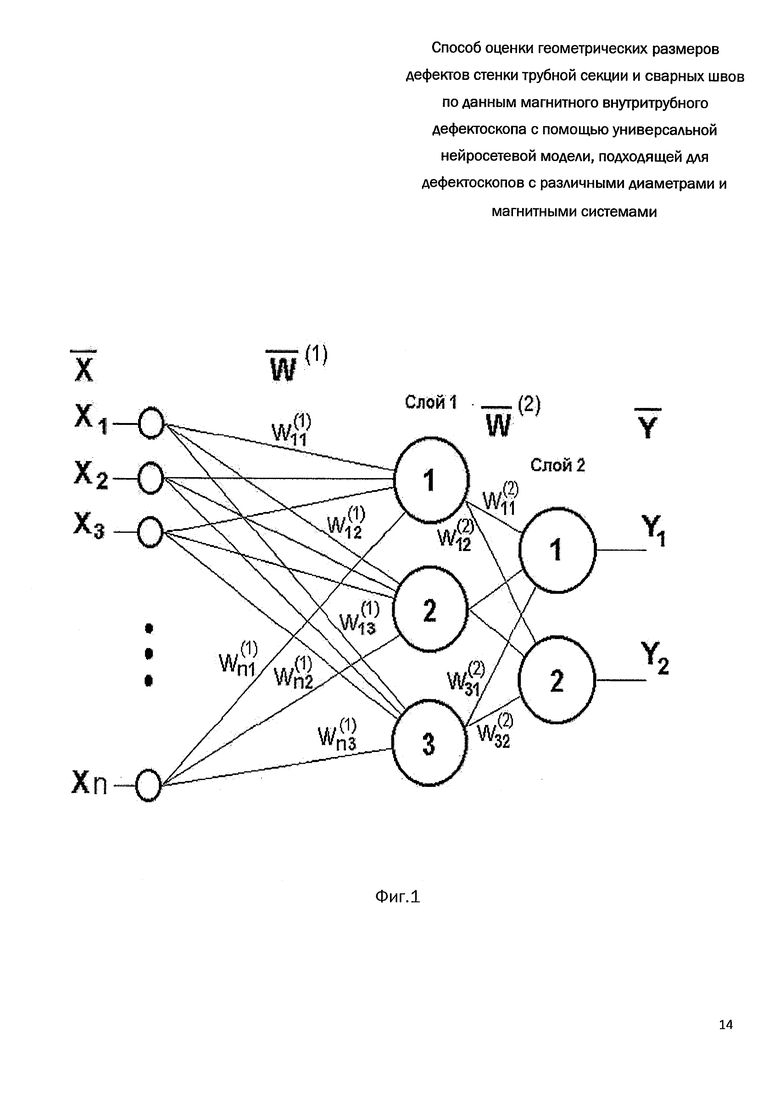
По нейровходам  на нейронах скрытого слоя вычисляются уj
на нейронах скрытого слоя вычисляются уj

Полученные в скрытом слое значения уже со своими выходными значениями подаются на выходной нейрон, где аналогичным образом вычисляется выходной результат.
На этот результат действует комитет из 9 (Девяти) нейросетей, каждая из которых выдает свой результат, медиана которых и является итоговым расчетным значением глубины или ширины дефекта (Фиг. 1).
Реализация универсальной нейросетевой модели для имеющегося дефектоскопа
1. Выделение сигнала от дефекта из совокупности магнитных измерений.
2. Выделение универсальных характеристик сигнала от дефекта.
3. Определение геометрических размеров дефектов по выделенным характеристикам сигнала как результат применения универсальной нейросетевой модели.
Реализация универсальной нейросетевой модели для вновь вводимого дефектоскопа
1. Сбор информации об уровне фонового поля для всех имеющихся толщин стенок трубопровода.
2. Построение кривой промагничивания и поиск ближайшей опорной кривой для применения.
3. Выделение сигнала от дефекта из совокупности магнитных измерений.
4. Выделение универсальных характеристик сигнала от дефекта.
5. Определение геометрических размеров дефекта как результат применения универсальной нейросетевой модели к выделенным характеристикам сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО МАГНИТНОГО ДЕФЕКТОСКОПА И СПОСОБ УМЕНЬШЕНИЯ ПОГРЕШНОСТИ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ ДЕФЕКТОВ ТРУБОПРОВОДА МАГНИТНЫМИ ДЕФЕКТОСКОПАМИ | 2014 |
|
RU2586261C2 |
| МАГНИТНЫЙ ДЕФЕКТОСКОП ДЛЯ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В СВАРНЫХ ШВАХ | 2015 |
|
RU2587695C1 |
| Способ определения сигнала от стенки трубы по данным ВИП CD статистики энергетических линий | 2018 |
|
RU2690975C1 |
| Способ оценки геометрических размеров дефектов стенки трубной секции и сварных швов по данным ультразвукового внутритрубного дефектоскопа с помощью поиска связанных индикаций | 2015 |
|
RU2607766C2 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2010 |
|
RU2439548C1 |
| СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697008C1 |
| УСТРОЙСТВО ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697007C1 |
| ПРЕОБРАЗОВАТЕЛЬ МАГНИТНОГО ПОЛЯ | 2006 |
|
RU2324195C1 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| Внутритрубный ультразвуковой дефектоскоп | 2016 |
|
RU2626744C1 |
Использование: для оценки геометрических размеров дефектов стенки трубной секции и сварных швов по данным магнитного внутритрубного дефектоскопа. Сущность изобретения заключается в том, что оценку геометрических размеров дефектов стенки трубной секции и сварных швов по данным магнитного внутритрубного дефектоскопа выполняют с помощью универсальной нейросетевой модели, реализующей способ, заключающийся в распространении сигналов ошибки от выходов нейронной сети к ее входам, в направлении, обратном прямому распространению сигналов в обычном режиме работы. Обучение нейросети происходит, используя стандартный алгоритм обратного распространения ошибки. Технический результат: обеспечение возможности оценки длины, ширины и глубины дефекта типа «потеря металла» по данным магнитного внутритрубного дефектоскопа с помощью универсальной нейросетевой модели, подходящей для дефектоскопов с различными диаметрами и магнитными системами. 1 з.п. ф-лы, 1 ил.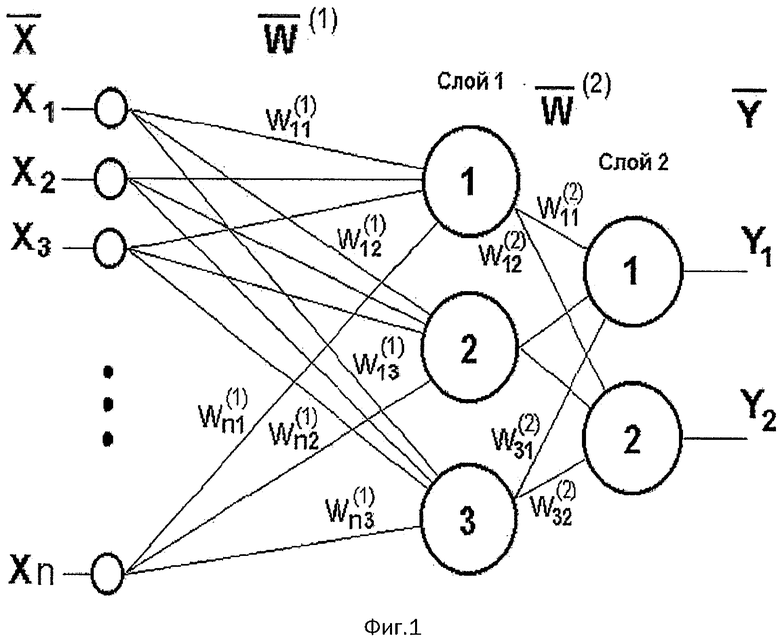
1. Способ оценки геометрических размеров дефектов стенки трубной секции и сварных швов по данным магнитного внутритрубного дефектоскопа с помощью универсальной нейросетевой модели, включающий в себя аппаратные средства: внутритрубный инспекционный прибор с магнитной системой; рабочая станция с программой-терминалом, предназначенная для выгрузки данных; файловый сервер для хранения данных; рабочая станция с программой, реализующей способ создания и применения универсальной нейросетевой модели; сервер базы данных для хранения результатов применения способа, а в качестве нейросетевой модели используется стандартный многослойный персептрон, отличающийся тем, что создана универсальная нейросетевая модель для имеющегося дефектоскопа, основа которой заключается в распространении сигналов ошибки от выходов нейросети к ее входам, в направлении, обратном прямому распространению сигналов в обычном режиме работы, при этом происходит выделение сигнала от дефекта из совокупности магнитных измерений; выделение универсальных характеристик сигнала от дефекта; определение геометрических размеров дефектов по выделенным характеристикам сигнала, при этом применен следующий алгоритм: сбор информации о дефектах с известными геометрическими размерами, полученными с полигонов, а также диагностические данные о дефектах с действующих магистральных трубопроводов, подвергнутых процедуре дополнительного дефектоскопического контроля или измеренные ультразвуковым методом, при этом происходит сбор информации о длине, ширине, глубине, амплитуде, форме сигнала дефекта и используются данные с трубопроводов различных диаметров; сбор информации об уровне фонового поля для всех имеющихся дефектоскопов и для всех имеющихся толщин стенок трубопроводов, при этом для каждой магнитной системы собирается информация по всем имеющимся диагностическим данным, при этом для каждого пропуска диагностического снаряда строится кривая промагниченности, представляющая собой зависимость локального фонового поля в мТл от толщины стенки в мм; определение универсальных характеристик дефектов путем обработки сигналов от магнитных датчиков; при этом исходные магнитные данные нуждаются в сглаживании, устраняющем раскалиброванность датчиков, и для сглаживания исходных данных применяется медианный фильтр и создается дискретная карта дефектов на основе матрицы сглаженных данных и локального фонового поля, по дискретной карте дефектов происходит поиск связных областей точек, являющихся дефектами секций, при этом создается карта поиска - матрица, такой же размерности как и дискретная карта дефектов, все элементы которой изначально равны нулю, на ней отмечаются все посещенные в ходе поиска связанных областей точки, чтобы не возвращаться к ним повторно, далее последовательно перебираются элементы дискретной карты дефектов, пока не находится элемент  , при этом если такой элемент не найден - это значит, что секция не содержит дефектов, далее к соответствующему элементу в матрице карты поиска присваивается отличное от нуля значение, чтобы больше к нему не возвращаться, далее перебираются
, при этом если такой элемент не найден - это значит, что секция не содержит дефектов, далее к соответствующему элементу в матрице карты поиска присваивается отличное от нуля значение, чтобы больше к нему не возвращаться, далее перебираются  , соседние с
, соседние с  , для которых выполнены два условия: условие дефектности
, для которых выполнены два условия: условие дефектности  и отсутствие на карте поиска
и отсутствие на карте поиска  ; и если выполнены оба условия, то соответствующим элементам также присваиваются отличные от нуля значения и процесс повторяется для новых точек; в результате перебираются и отмечаются на дискретной карте поиска все элементы связанной области, то есть полная область данного дефекта; далее по крайним точкам найденной области со значениями два и три определяются границы и рамки данного дефекта и на дискретной карте дефектов ищется следующая точка со значением три, которая еще не отмечена на дискретной карте поиска и так до тех пор, пока не будут перебраны все такие точки и найдены области соответствующих дефектов.
; и если выполнены оба условия, то соответствующим элементам также присваиваются отличные от нуля значения и процесс повторяется для новых точек; в результате перебираются и отмечаются на дискретной карте поиска все элементы связанной области, то есть полная область данного дефекта; далее по крайним точкам найденной области со значениями два и три определяются границы и рамки данного дефекта и на дискретной карте дефектов ищется следующая точка со значением три, которая еще не отмечена на дискретной карте поиска и так до тех пор, пока не будут перебраны все такие точки и найдены области соответствующих дефектов.
2. Способ оценки геометрических размеров дефектов стенки трубной секции и сварных швов по данным магнитного внутритрубного дефектоскопа с помощью универсальной нейросетевой модели по п. 1, отличающийся тем, что создана универсальная нейросетевая модель для вновь вводимого дефектоскопа, которая производит сбор информации об уровне фонового поля для всех имеющихся толщин стенок трубопровода; далее происходит построение кривой промагничивания и поиск ближайшей опорной кривой для применения, выделение сигнала от дефекта из совокупности магнитных измерений, выделение универсальных характеристик сигнала от дефекта и определение геометрических размеров дефекта.
| УСТРОЙСТВО МАГНИТНО-ПОИСКОВОЙ СИСТЕМЫ ВНУТРИТРУБНОГО СНАРЯДА-ДЕФЕКТОСКОПА | 2000 |
|
RU2204130C2 |
| ДЕФЕКТОСКОП-СНАРЯД ДЛЯ ВНУТРИТРУБНЫХ ОБСЛЕДОВАНИЙ ТРУБОПРОВОДОВ | 1994 |
|
RU2102738C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1997 |
|
RU2133032C1 |
| МАГНИТНЫЙ ДЕФЕКТОСКОП | 2005 |
|
RU2295721C2 |
| US 5864232A, 26.01.1999 | |||
| US 5402065A, 28.03.1995. | |||

