ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к канатной системе транспортировки по меньшей мере с одним тяговым канатом и тележкой.
Более конкретно, настоящее изобретение относится к канатной системе транспортировки, содержащей направляющую качения, продолжающуюся вдоль заданной траектории, тележку, выполненную с возможностью качения вдоль направляющей качения, тяговый канат, продолжающийся вдоль заданной траектории и выполненный с возможностью избирательного соединения с тележкой, и по меньшей мере один роликовый узел, содержащий раму и по меньшей мере один ролик, установленный на раму и выполненный с возможностью поддержания тягового каната на участке заданной траектории.
УРОВЕНЬ ТЕХНИКИ
В известных системах канатной транспортировки вышеуказанного типа тяговый канат, когда он продолжается по относительно длинной траектории, должен поддерживаться одним или более роликовыми узлами вдоль участков траектории. Он используется с канатными системами транспортировки, в которых направляющая качения для тележки образована как одним или более несущим тросом, так и с канатными системами транспортировки, такими как канатные железные дороги, в которых направляющая качения для тележки образована рельсами. При прохождении вдоль роликового узлу тележка сбрасывает тяговый канат с роликов, что приводит к множеству нежелательных последствий: увеличению нагрузки на тележку, увеличению напряжения между тележкой и направляющей качения, и вибрации тягового каната.
Первые два могут быть предотвращены увеличением размеров деталей, подвергаемых наиболее жесткой нагрузке, но только за счет увеличения размеров и веса канатной системы транспортировки в целом. Вибрация тягового каната, с другой стороны, является чрезвычайно опасной и может привести даже к соскакиванию тягового каната с направляющей качения и, таким образом, препятствовать движению тележки. Системы для гашения колебаний раскрыты в FR 2670452, WO 2009/130239 и WO 2005/032901. Эти системы оказались эффективными для гашения колебаний, но они не решают ни одну из первых двух проблем.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей данного изобретения является предложение канатной системы транспортировки, выполненной для устранения недостатков известного уровня техники.
Согласно данному изобретению предложена канатная система транспортировки по меньшей мере с одним тяговым канатом и тележкой, содержащая направляющую качения, продолжающуюся вдоль заданной траектории, тележку, выполненную с возможностью качения вдоль направляющей качения, тяговый канат, продолжающийся вдоль заданной траектории и выполненный с возможностью избирательного соединения с тележкой, и по меньшей мере один роликовый узел, установленный на раме с возможностью перемещения, содержащий раму и выполненный с возможностью поддержания тягового каната на заданном участке траектории, и по меньшей мере один упругий элемент, расположенный между рамой и роликом для обеспечения возможности занятия роликом первого рабочего положения в контакте c тяговым канатом, в котором по меньшей мере один упругий элемент обеспечивает возможность занятия роликом второго рабочего положения ниже, чем первое рабочее положение, и в контакте с тележкой при перемещении тележки вдоль роликового узла, при этом канатная система транспортировки отличается тем, что роликовый узел содержит множество выровненных роликов, установленных с возможностью перемещения на раме, и множество упругих элементов, причем каждый ролик соединен с рамой посредством по меньшей мере одного упругого элемента.
Тяговый канат, таким образом, удерживается под управлением роликом, который при прохождении тележки мимо перемещается вниз, но без потери контакта с канатом или тележкой и, таким образом, поддерживает часть нагрузки каната и тележки. Как только тележка проходит мимо, вследствие этого происходит совсем незначительное изменение в нагрузке на роликовый узел и смещение тягового каната также является минимальным.
В предпочтительном варианте осуществления настоящего изобретения ролик вращается относительно первой оси, поперечной заданной траектории, и ролик соединен с рамой посредством упругого элемента.
Роликовый узел качения предпочтительно содержит гаситель колебаний, причем ролик соединен с рамой посредством гасителя колебаний.
Любое колебание ролика, вызванное прохождением тележки, соответственно гасится.
В предпочтительном варианте осуществления роликовый узел содержит подвижный рычаг, шарнирно соединенный с рамой относительно второй оси, поперечной заданной траектории, ролик, установленный на соответствующем подвижном рычаге для вращения относительно первой оси, и неподвижный рычаг, выполненный за одно целое с рамой и смежный соответствующему подвижному рычагу, подвижный рычаг и неподвижный рычаг выполнены с возможностью образования гнезда для упругого элемента и/или гасителя колебаний.
В предпочтительном варианте осуществления настоящего изобретения тележка содержит зажим, который при использовании продолжается частично ниже тягового каната и расположен непосредственно в контакте с роликом.
Часть нагрузки тягового каната, таким образом, постоянно ложится на ролик даже при прохождении тележки.
В предпочтительном варианте осуществления настоящего изобретения роликовый узел содержит множество выровненных роликов, установленных с возможностью перемещения на раме, и множество упругих элементов, причем каждый из роликов соединен с рамой посредством по меньшей мере одного упругого элемента.
Кроме того, каждый ролик выполнен с возможностью перемещения относительно рамы независимо от других роликов. Следовательно, нагрузка, передаваемая тягового каната, распределяется между различными роликами.
Другая задача настоящего изобретения состоит в предложении способа работы канатной системы транспортировки, содержащей по меньшей мере один тяговый канат и тележку, предназначенного для устранения недостатков известного уровня техники.
Согласно настоящему изобретению предложен способ работы канатной системы транспортировки, содержащей по меньшей мере один тяговый канат и тележку, включающий в себя этапы, на которых: перемещают тележку вдоль направляющей качения, продолжающейся вдоль заданной траектории, посредством тягового каната, продолжающегося вдоль заданной траектории, выполненного с возможностью избирательного соединения с тележкой и поддерживаемого на участке заданной траектории, образованном, по меньшей мере, роликовым узлом, который содержит раму, по меньшей мере один ролик, установленный на раме с возможностью перемещения, и выполненный для поддержания тягового каната на заданном участке траектории, и по меньшей мере один упругий элемент, расположенный между рамой и роликом, опускают ролик из первого рабочего положения, в котором ролик находится в контакте с тяговым канатом, во второе рабочее положение, в котором ролик находится в контакте с тележкой и при прохождении тележки мимо и посредством самой тележки, и возвращают ролик в первое рабочее положение, как только тележка прошла мимо, при этом способ отличается тем, что роликовый узел качения содержит множество выровненных роликов, установленных с возможностью перемещения на раме, и множество упругих элементов, причем каждый ролик соединен с рамой по меньшей мере посредством одного упругого элемента, при этом способ включает в себя этап, на котором перемещают каждый из указанного множества роликов между первым и вторым рабочим положением при перемещении тележки, тележка выполнена с возможностью поддержания множества роликов, меньшего, чем указанное множество роликов, одновременно во втором рабочем положении.
Тяговый канат, таким образом, не должен быть перемещен из его нормального положения на роликовом узле.
В предпочтительном варианте осуществления способ включает в себя этап, на котором амортизирующим образом перемещают ролик между первым и вторым рабочим положением.
В предпочтительном варианте осуществления тележка содержит зажим для захватывания тягового каната, ролик содержит канавку для вмещения тягового каната и зажима, при этом способ включает в себя этап, на котором опускают ролик посредством зажима.
Перемещение ролика, таким образом, сведено до минимума.
В предпочтительном варианте осуществления настоящего изобретения способ включает в себя этапы, на которых опускают и обеспечивают плавный обратный ход ролика посредством двух клинообразных кулачков на противоположных концах зажима, соответственно.
В результате обеспечивается постепенный переход между первым рабочим положением, в котором ролик поддерживает тяговый канат, и вторым рабочим положением, в котором ролик частично поддерживает тележку, соединенную, в свою очередь, с тяговым канатом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Неограничительный вариант осуществления настоящего изобретения описан посредством примера со ссылкой на приложенные чертежи, на которых:
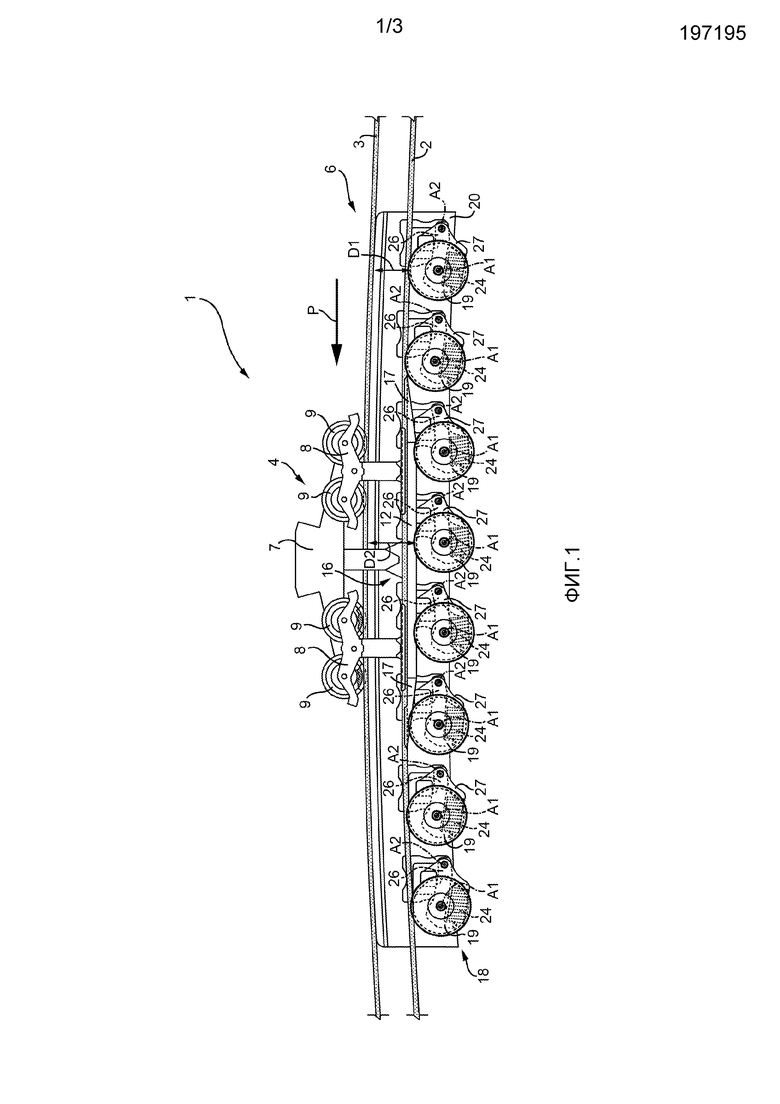
на фиг. 1 показан схематичный вид сбоку канатной системы транспортировки, в соответствии с настоящим изобретением, в частичном разрезе, с удаленными для ясности деталями,
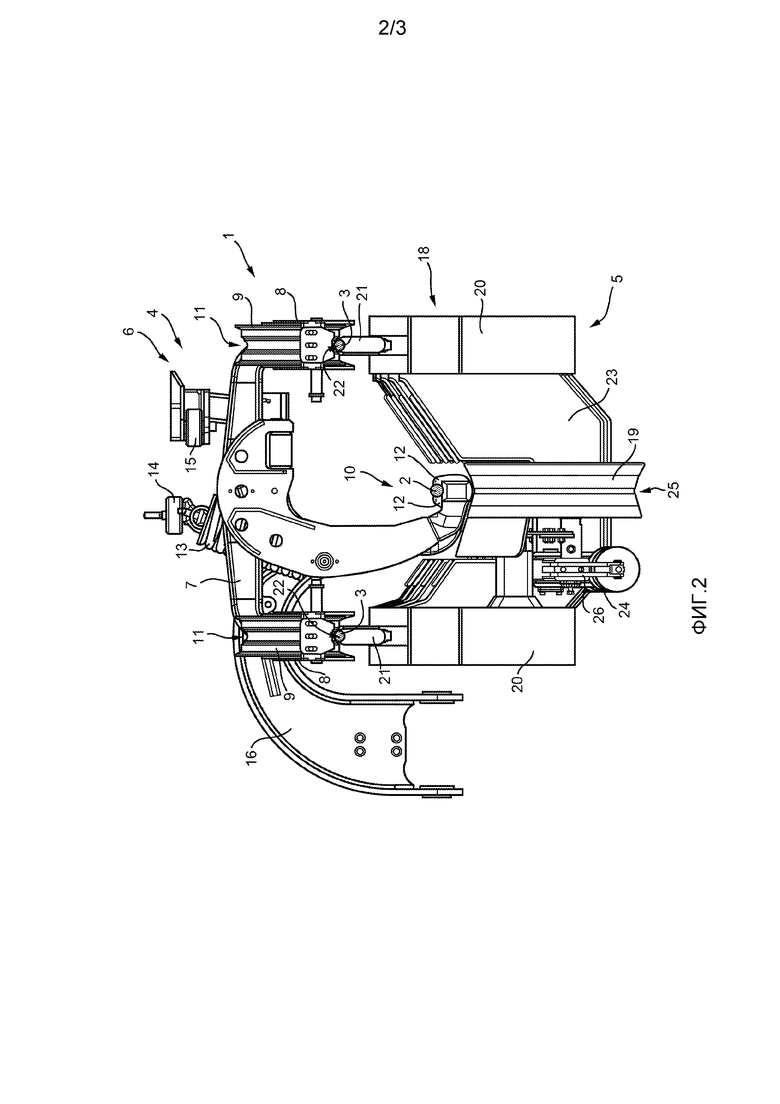
на фиг. 2 показан в увеличенном масштабе вид спереди канатной системы транспортировки по фиг. 1, в частичном разрезе, с удаленными для ясности деталями,
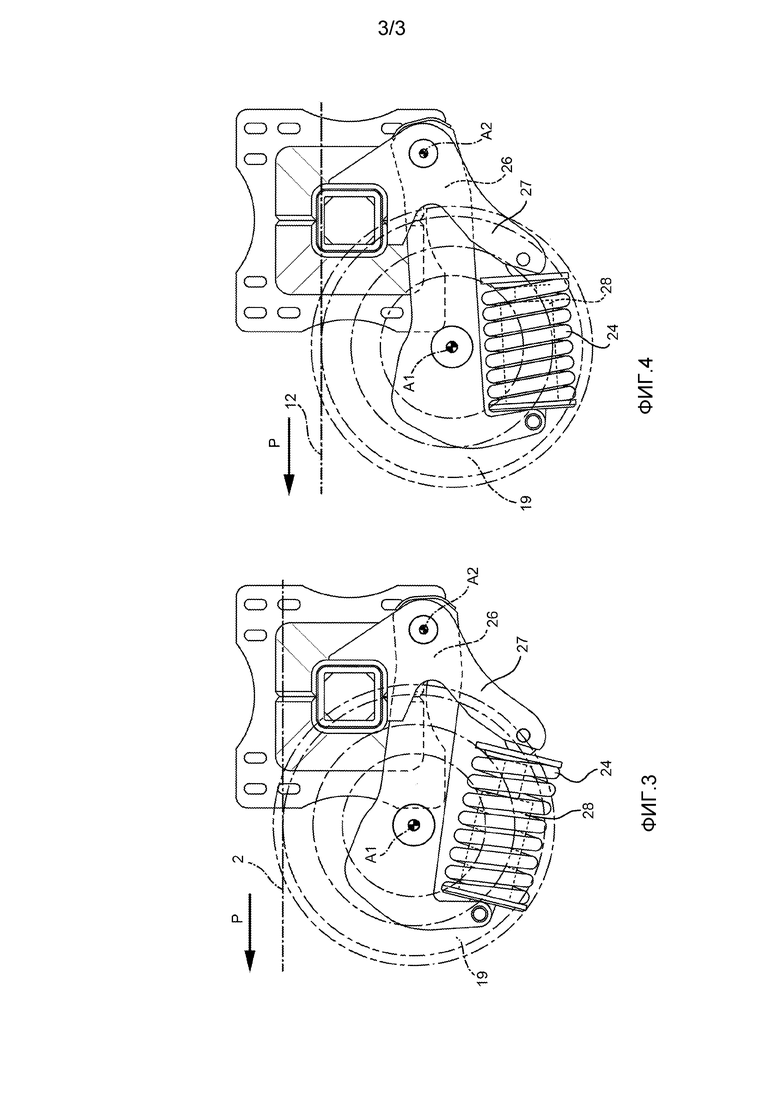
на фиг. 3 и фиг. 4 показаны виды сбоку в увеличенном масштабе узла системы по фиг. 1, с удаленными для ясности деталями, в соответствующих рабочих положениях.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг. 1 ссылочной позицией 1 обозначена в целом канатная система транспортировки, содержащая тяговый канат 2, два несущих каната 3 (фиг. 2), тележку 4, выполненную с возможностью качения вдоль несущих канатов 3, и роликовый узел 5, выполненный с возможностью поддержания несущих канатов 3 и тягового каната 2. Несущие канаты 3 образуют направляющую 6 качения, по которой катится тележка 4 и которая проходит вдоль заданной траектории P между двумя станциями отправления/прибытия, не показанными на чертежах.
Хотя показанный пример относится конкретно к системе с тремя канатами, в которой направляющая качения образована двумя несущими канатами, настоящее изобретение также применимо к двухканатным системам, в которых направляющая качения образована одним несущим канатом, и к канатным дорогам, на которых направляющая качения образована рельсами.
Тележка 4 содержит раму 7, четыре качающихся рычага 8 (только два показаны на фиг. 1), каждый шарнирно соединен с рамой 7 и является поддерживающим два колеса 9, и зажим 10 для избирательного захватывания тягового каната 2. Как показано на фиг. 2, каждое колесо 9 содержит канавку 11 для частичного вмещения несущего каната 3. Зажим 10 содержит два захвата 12, которые выполнены с возможностью захватывания тягового каната 2, удерживаются в положении зажима пружиной 13, и избирательно высвобождаются посредством роликов 14 и 15, выполненных с возможностью взаимодействия с кулачками (не показаны) на станциях отправления/прибытия (не показаны). Рама 7 содержит рычаг 16, выполненный с возможностью поддержания транспортного устройства, не показан на чертежах. Другими словами, канатная система 1 транспортировки является так называемой системой с автоматическим зажимом в движении.
Как показано на фиг. 1, зажим 10 продолжается вдоль удлиненного участка, параллельного траектории P, и содержит два клинообразных концевых кулачка 17.
Как показано на фиг. 1, роликовый узел 5 может быть закреплен на опоре (не показана) или на другом неподвижном элементе канатной системы транспортировки и выполнен с возможностью поддержания тягового каната 2 и, в показанном примере, двух несущих канатов 3 на участке траектории P. Как показано на фиг. 2, роликовый узел 5 содержит раму 18 и множество роликов 19, установленных на раме 18 с возможностью перемещения, которая содержит две балки 20, параллельные друг другу и траектории P и выполненные с возможностью поддержания несущих канатов 3. В показанном примере каждая балка 20 содержит брус 21, в котором образовано гнездо 22 для вмещения одного из несущих канатов 3, балки 20 соединены друг с другом пластинами 23, а ролики 19 расположены между двумя балками 20 под несущими канатами 3, то есть под направляющей 6 качения, для поддержания тягового каната 2, который расположен на половине расстояния между двумя несущими канатами 3 под направляющей 6 качения.
Как показано на фиг. 1, ролики 19 расположены под тяговым канатом 2 и поддерживаются упругими элементами 24. В показанном варианте осуществления каждый ролик 19 выполнен с возможностью перемещения, независимо относительно рамы 18 и других роликов 19, между первым рабочим положением в контакте с рамой 2, и вторым рабочим положением ниже первого в контакте с зажимом 10. На фиг. 1 четыре ролика 19 на противоположных концах роликового узла 5 находятся в первом рабочем положении, три центральных ролика 19 под зажимом 10 находятся во втором рабочем положении, и два ролика 19 в кулачках находятся в промежуточном положении между первым и вторым рабочими положениями.
Как показано на фиг. 3 и фиг. 4, каждый ролик 19 вращается относительно оси Al, поперечной заданной траектории P, содержит канавку 25 для вмещения тягового каната 2 и зажима 10 и соединен с соответствующим упругим элементом, поддерживающим в верхнем направлении ролик 19. В предпочтительном варианте осуществления, как показано на фиг. 1, канатная система 1 транспортировки содержит множество подвижных рычагов 26 и множество неподвижных рычагов 27.
Как показано на фиг. 3 и фиг. 4, каждый подвижный рычаг 26 поддерживает ролик 19 и шарнирно соединен с рамой 18 относительно оси A2, параллельный оси Al. Каждый неподвижный рычаг 27 расположен близко к подвижному рычагу 26, и подвижный рычаг 26 и неподвижный рычаг 27 выполнены с возможностью образования, между их свободными концами, гнезда для упругого элемента 24, который, в показанном примере, работает под воздействием сжатия и предпочтительно является спиральной пружиной. Роликовый узел 5 также содержит, для каждого ролика 19, гаситель 28 колебаний, который продолжается параллельно упругому элементу 24 между свободными концами подвижного рычага 26 и неподвижного рычага 27.
На фиг. 3 показан упругий элемент 24 растянутым, и ролик 19 в первом рабочем положении в контакте с тяговым кабелем 2, и на фиг. 4 показан упругий элемент 24 в сжатом положении и ролик 19 в нижнем втором рабочем положении в контакте с зажимом 10.
Как показано на фиг. 1, ролики 19 и направляющая 6 качения являются расположенными на расстоянии Dl по вертикали, а зажим 10 выполнен с возможностью, при прохождении тележки 4 вдоль роликового узла 5, расположения роликов 19 в контакте с зажимом 10 и снижения относительно направляющей 6 качения. То есть при расположении в контакте с зажимом 10, каждый ролик 19 находится на расстоянии D2, большем чем Dl, от направляющей качения, так что, когда тележка 4 перемещается вдоль роликового узла 5, ролики 19 опускаются из первого рабочего положения во второе рабочее положение, а тяговый канат 2 только незначительно перемещается и никогда не выходит из канавок 25 (фиг. 2) в роликах 19, минимизируя, таким образом, колебания тягового каната. Кроме того, гаситель колебаний предотвращает колебания роликов 19, когда они отходят назад в положение, и ролики 19 полностью никогда не разгружаются, это означает, что нагрузки на роликовый узел 5 распределены по различным составным частям роликового узла 5, даже при прохождении тележки 4 мимо.
Настоящее изобретение также очевидно охватывает варианты осуществления, не описанные подробно в данном документе, так же как эквивалентные варианты осуществления изобретения в пределах объема охраны приложенной формулы изобретения. Например, упругие элементы могут быть образованы пластинчатыми пружинами или другими упругими элементами, а ролики могут быть соединены с рамой другими различными способами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРОСОВАЯ ТРАНСПОРТИРОВОЧНАЯ СИСТЕМА С ПО МЕНЬШЕЙ МЕРЕ ОДНИМ ОПОРНЫМ ТРОСОМ И ОДНИМ ТЯГОВЫМ ТРОСОМ | 2010 |
|
RU2554906C2 |
| АГРЕГАТ С КАНАТНОЙ ТЯГОЙ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 1993 |
|
RU2090990C1 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2011 |
|
RU2466889C1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| МАШИНА ДЛЯ ВЫГРУЗКИ ИЗ КРЫТЫХ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU231374A1 |
| СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ ЛЮДЕЙ | 2014 |
|
RU2644818C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2010 |
|
RU2442711C1 |
| СИСТЕМА ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ, СОДЕРЖАЩАЯ ПЕРЕДАЮЩУЮ КОНСТРУКЦИЮ МЕЖДУ ДВУМЯ КАНАТНЫМИ ПЕТЛЯМИ | 2020 |
|
RU2808647C2 |
| ТРАНСПОРТНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 1994 |
|
RU2146626C1 |
| Устройство для поддержки и направления тягового каната транспортного средства транспортной установки, сочленение такового устройства и способ изготовления устройства | 2019 |
|
RU2774334C2 |
Изобретение относится к канатной системе транспортировки. Канатная система транспортировки содержит направляющую качения, продолжающуюся вдоль заданной траектории, тележку, выполненную с возможностью качения вдоль направляющей качения, тяговый канат, продолжающийся вдоль заданной траектории и выполненный с возможностью избирательного соединения с тележкой, и по меньшей мере один роликовый узел качения. При этом роликовый узел качения содержит раму, множество роликов, установленных на раме с возможностью перемещения, и упругие элементы, расположенные между рамой и роликами для обеспечения возможности занятия роликами первого рабочего положения в контакте с тяговым канатом, и второго рабочего положения ниже, чем первое рабочее положение, и в контакте с тележкой при перемещении тележки вдоль роликового узла. В результате уменьшаются вибрации тягового каната, снижаются нагрузки на тележку, уменьшаются напряжения между тележкой и направляющей качения. 2 н. и 15 з.п. ф-лы, 4 ил.
1. Канатная система транспортировки по меньшей мере с одним тяговым канатом и тележкой, причем канатная система (1) транспортировки содержит направляющую (6) качения, продолжающуюся вдоль заданной траектории (Р), тележку (4), выполненную с возможностью качения вдоль направляющей (6) качения, тяговый канат (2), продолжающийся вдоль заданной траектории (Р) и выполненный с возможностью избирательного соединения с тележкой (4), и по меньшей мере один роликовый узел (5), содержащий раму (18), при этом канатная система транспортировки отличается тем, что роликовый узел (5) содержит множество выровненных роликов (19), установленных на раме (18) с возможностью перемещения, и множество упругих элементов (24), расположенных между рамой (18) и роликами (19) для обеспечения возможности занятия роликами (19) первого рабочего положения в контакте с тяговым канатом (2), и второго рабочего положения ниже, чем первое рабочее положение, и в контакте с тележкой (4) при перемещении тележки (4) вдоль роликового узла (5), при этом каждый ролик (19) соединен с рамой (18) посредством по меньшей мере одного упругого элемента (24).
2. Канатная система транспортировки по п.1, в которой каждый из роликов (19) вращается относительно первой оси (А1), поперечной заданной траектории (Р), причем каждый из роликов (19) соединен с рамой (18) посредством упругого элемента (24).
3. Канатная система транспортировки по п.1, в которой роликовый узел (5) содержит гасители (28) колебаний, причем каждый из роликов (19) соединен с рамой (18) посредством гасителя (28) колебаний.
4. Канатная система транспортировки по п.2, в которой роликовый узел (5) содержит подвижные рычаги (26), шарнирно соединенные с рамой (18) относительно второй оси (А2), поперечной заданной траектории (Р), причем каждый из роликов (19) установлен на соответствующий подвижный рычаг (26) для вращения относительно первой оси (А1).
5. Канатная система транспортировки по п.4, в которой роликовый узел (5) содержит неподвижные рычаги (27), выполненные за одно целое с рамой (18) и смежные соответствующим подвижным рычагам (26), при этом подвижный рычаг (26) и неподвижный рычаг (27) выполнены для образования гнезда для упругого элемента и/или гасителя (28) колебаний.
6. Канатная система транспортировки по п.1, в которой ролики (19) расположены ниже тягового каната (2).
7. Канатная система транспортировки по п.1, в которой расстояние (D1) между каждым роликом (19) и направляющей (6) качения изменяется в зависимости от нагрузки на соответствующий ролик (19).
8. Канатная система транспортировки по п.1, содержащая по меньшей мере один несущий канат (3), раму (18) роликового узла (5), содержащую гнездо (22) для частичного вмещения несущего каната (3) и для образования части направляющей (6) качения вдоль роликового узла (5).
9. Канатная система транспортировки по п.1, в которой тележка (4) содержит зажим (10) для захвата тягового каната (2), при этом каждый из роликов (19) содержит канавку (25) для вмещения тягового каната (2) и зажима (10).
10. Канатная система транспортировки по п.9, в которой зажим (10) при использовании продолжается частично ниже тягового каната (2) и расположен непосредственно в контакте с роликами (19).
11. Канатная система транспортировки по п.10, в которой зажим (10) содержит два клинообразных концевых кулачка (17), причем кулачки (17) опускают и обеспечивают возможность плавного обратного хода роликов (19), соответственно.
12. Канатная система транспортировки по п.1, в которой тяговый канат (2) расположен ниже направляющей (6) качения.
13. Канатная система транспортировки по п.1, в которой каждый ролик (19) выполнен с возможностью перемещения относительно рамы (18) независимо от других роликов (19).
14. Способ работы канатной системы транспортировки, содержащей по меньшей мере один тяговый канат и тележку, включающий в себя этапы, на которых: перемещают тележку (4) вдоль направляющей (6) качения, продолжающейся вдоль заданной траектории (Р), посредством тягового каната (2), продолжающегося вдоль заданной траектории (Р), выполненного с возможностью избирательного соединения с тележкой (4) и поддерживаемого вдоль участка заданной траектории (Р), образованного, по меньшей мере, роликовым узлом (5), содержащим раму (18), при этом способ отличается тем, что роликовый узел (5) содержит множество выровненных роликов (19), установленных на раме (18) с возможностью перемещения, и множество упругих элементов (24), расположенных между рамой (18) и роликами (19), при этом каждый ролик (19) соединен с рамой (18) посредством по меньшей мере одного упругого элемента (24), и способ включает в себя этап, на котором перемещают каждый из указанных роликов (19) между первым и вторым рабочим положением при прохождении тележки (4) посредством самой тележки (4), причем в первом рабочем положении ролики (19) находятся в контакте с тяговым канатом (2), а во втором рабочем положении ролики (19) находятся в контакте с тележкой (4) при прохождении тележки (4) мимо, причем возвращают каждый из роликов (19) в первое рабочее положение, как только тележка (4) прошла мимо, при этом тележка (4) выполнена с возможностью поддержания множества роликов (19), меньшего чем указанное множество роликов (19), одновременно во втором рабочем положении.
15. Способ по п.14, включающий в себя этап, на котором амортизирующим образом перемещают ролики (19) между первым и вторым рабочим положением.
16. Способ по п.14, в котором тележка (4) содержит зажим (10) для захвата тягового каната (2), а каждый из роликов (19) содержит канавку (25) для вмещения тягового каната (2) и зажима (10), при этом способ включает в себя этап, на котором опускают ролики (19) посредством зажима (10).
17. Способ по п.16, включающий в себя этап, на котором опускают и обеспечивают возможность плавного обратного хода роликов (19) посредством двух клинообразных кулачков (17) на противоположных концах зажима (10), соответственно.
| Способ получения алкенилсукцинцианэтилимидов 1,2-дизамещённых имидазолина | 2017 |
|
RU2670452C1 |
| US 6431080 B1, 13.08.2002 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Упор для разгрузки вагонеток подвесных канатных дорог | 1961 |
|
SU141885A1 |
| Опора для тягового каната проволочно-канатной дороги | 1926 |
|
SU51338A1 |

