Область техники
Изобретение относится к системам управления транспортным средством, в частности, к инцепторам управления для транспортных средств.
Уровень техники
Стандартные инцепторы управления используются в транспортных средствах для того, чтобы помочь летчику точно управлять транспортным средством. Инцепторы управления используются, например, в летательных аппаратах, таких как вертолеты. Принцип полета вертолета весьма сложный, так как для поддержания аэродинамической устойчивости необходимо одновременно совершать несколько действий. Системы управления должны передавать очень точные сигналы управления в компьютер управления полетом в ответ на действия пилота или на иные входные сигналы управления.
Стандартные ручки управления «шаг-газ» вертолета соединены с компьютером управления полетом при помощи множества передач, таких как прямозубые цилиндрические передачи и т.п. Между тем, для подобной конструкции передач требуется управляющая муфта, которая могла бы расцеплять шестерни, позволяя пилоту при необходимости осуществить обратный ход ручки управления. Конструкция с передачей и муфтой обеспечивает разъединение между ручкой управления и органами управления транспортного средства так, что пилот не получает текущую обратную связь и не может чувствовать текущее усилие или иное входное воздействие органов управления. Существует потребность в усовершенствовании системы управления инцептора транспортного средства (включая летательные аппараты, космические аппараты, морские суда и наземные транспортные средства), которая позволила бы точно управлять транспортным средством с низким энергопотреблением и с быстрым откликом.
Раскрытие изобретения
Изобретение относится к узлу инцептора управления и системам для транспортных средств, которые не имеют известных недостатков, а также обеспечивают дополнительные преимущества. По меньшей мере один из вариантов осуществления изобретения относится к устройству активного управления положением, выполненному с возможностью обратного хода (пилот преодолевает вручную действия автоматического управления) за счет прямого соединения между рычагом, коробкой передач с большим передаточным отношением и двигателем без использования управляющей муфты. Возможность обратного хода осуществляется за счет использования волновой передачи, также известной как волновая зубчатая передача с гибким звеном. Алгоритмы управления позволяют обеспечивать точное управление положением, скоростью перемещения и усилием, прикладываемым к узлу инцептора. По меньшей мере один вариант осуществления изобретения относится к инцептору автоматического управления общим шагом винта вертолета электродистанционного типа, который сводит к минимуму физические габариты инцептора управления, обеспечивает автоматическое дублирование, имеет вероятность отказа ниже 10-9, обеспечивает регулируемый кинематический радиус и имеет низкое энергопотребление.
Узел инцептора управления может быть использован в летальных аппаратах, таких как вертолет, для помощи в управлении одним из наиболее важных аспектов динамики полета, а именно поддержания углового пространственного положения летательного аппарата независимо от маневра или окружающей среды, причем в отличие от традиционных ручек управления это достигается при низком энергопотреблении и быстром отклике.
Узел инцептора управления согласно изобретению обеспечивает выдачу динамического входного сигала, используемого для определения различных аспектов динамики пространственного положения летательного аппарата. Узел инцептора управления воздушным и наземным транспортным средством со встроенным устройством управления определяет автоматический отклик как в ручном, так и в автоматическом режимах, позволяя при этом оператору преодолеть вручную действия автоматической системы управления. Узел инцептора управления может быть использован в качестве основного средства ручки «шаг-газ» управления аэродинамикой полета вертолета путем изменения угла наклона всех (т.е. одновременно всех) основных лопастей несущего винта, независимо от их положения. Таким образом, после включения ручки «шаг-газ» осуществляется общий ввод данных, и положение всех лопастей будет одинаково изменено. В результате происходит увеличение или уменьшение общей подъемной силы, создаваемой несущим винтом. При горизонтальном полете это приведет к подъему или спуску, тогда как при наклоне вертолета вперед увеличение общей подъемной силы создаст ускорение одновременно с заданным набором высоты.
Кроме того, один из вариантов осуществления изобретения относится к узлу управления транспортным средством, имеющим систему управления транспортным средством. Узел управления включает в себя узел ручки управления, содержащий рычаг с первым и вторым участками, причем к первому участку рычага прикреплен первый приводной вал, установленный с возможностью вращения вокруг первой оси, а ко второму участку рычага прикреплена рукоятка, расположенная на расстоянии от первого приводного вала. Рычаг с рукояткой установлен с возможностью вращения вокруг первой оси вращения. Волновая коробка передач содержит гибкое зубчатое колесо, соединенное со вторым приводным валом, расположенным на расстоянии от первого приводного вала, причем второй приводной вал выполнен с возможностью вращения вокруг второй оси совместно с вращением гибкого зубчатого колеса. С первым и вторым приводными валами соединен рычажный механизм, причем вращение второго приводного вала вокруг второй оси поворачивает рычажный механизм вокруг первой и второй осей вращения, вращая тем самым первый приводной вал вокруг первой оси. Двигатель по меньшей мере частично управляется системой управления транспортным средством и соединен с гибким зубчатым колесом для обеспечения прямого, без управляемой муфты, соединения между двигателем, волновой коробкой передач, рычажным механизмом и рычагом управления. Волновая коробка передач выполнена с возможностью обратного хода для активного сопротивления повороту инцептора управления и рукоятки.
В соответствии с другим вариантом осуществления изобретения узел управления транспортным средством, имеющим систему управления, включает в себя узел ручки управления, содержащий рычаг, выполненный с возможностью поворота вокруг первой оси вращения, и рукоятку, прикрепленную к рычагу и выполненную с возможностью ее захвата пользователем. Волновая коробка передач содержит гибкое зубчатое колесо, соединенное с приводным валом, расположенным на расстоянии от рычага и установленным с возможностью совместного с гибким зубчатым колесом вокруг второй оси вращения, расположенной на расстоянии от первой. Поворот приводного вала вокруг второй оси вращения поворачивает рычажный механизм вокруг первой и второй осей вращения, вызывая тем самым поворот рычага вокруг первой оси вращения. Двигатель по меньшей мере частично управляется системой управления транспортным средством и соединен с гибким зубчатым колесом волновой коробки передач для его вращения, что обеспечивает прямое, без использования управляемой муфты, соединение между двигателем, волновой коробкой передач, рычажным механизмом и рычагом управления, причем волновая коробка передач выполнена с возможностью обратного хода для активного сопротивления повороту рычага.
Другим объектом изобретения является узел инцептора ручки «шаг-газ» транспортного средства, имеющего систему управления. Узел инцептора ручки «шаг-газ» включает в себя опорную конструкцию, установленную на транспортном средстве. В опорной конструкции установлен с возможностью вращения вокруг первой оси первый приводной вал. Рычаг ручки «шаг-газ» соединен у первого конца с первым приводным валом и выполнен с возможностью поворота совместно с первым приводным валом относительно опорной конструкции вокруг первой оси вращения. Со вторым концом рычага ручки «шаг-газ», расположенным на расстоянии от первого конца, соединена рукоятка, которая содержит множество элементов управления, соединенных с системой управления транспортным средством и выполненных с возможностью захвата пользователем для управления по меньшей мере частью транспортного средства. С опорной конструкцией и вторым приводным валом соединена волновая коробка передач, содержащая по меньшей мере одну волновую зубчатую передачу. Волновая зубчатая передача и второй приводной вал могут вращаться относительно опорной конструкции вокруг второй оси вращения, расположенной на расстоянии от первого приводного вала. Первый и второй приводные валы соединены между собой посредством рычажного механизма, который передает поворотное движение первого приводного вала второму приводному валу. Двигатель, по меньшей мере частично, управляемый системой управления транспортным средством, соединен с волновой коробкой передач без использования управляющей муфты, обеспечивая прямое соединение между рычагом ручки «шаг-газ», рычажным механизмом, волновой коробкой передач и двигателем. Волновая коробка передач выполнена с возможностью обратного хода для активного сопротивления повороту рычага ручки «шаг-газ».
Краткое описание чертежей
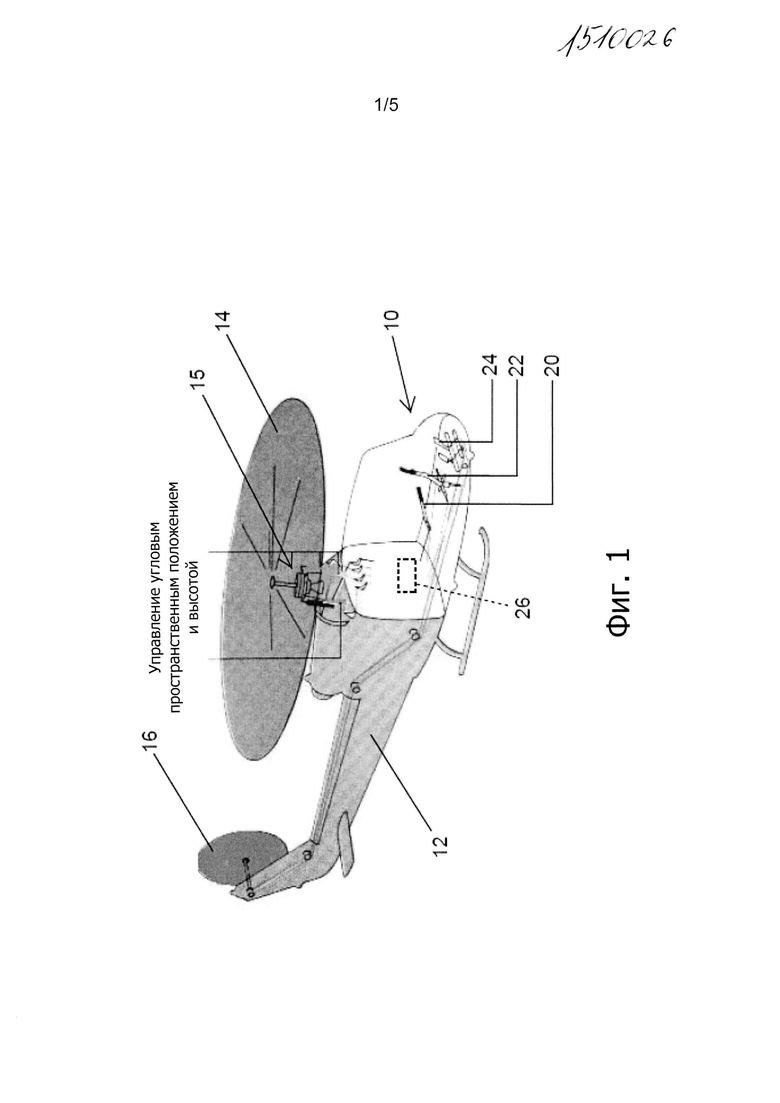
На фиг. 1 схематично показаны в общем виде органы управления вертолетом, которые включают в себя узел инцептора ручки «шаг-газ», в соответствии с одним из вариантов осуществления изобретения;
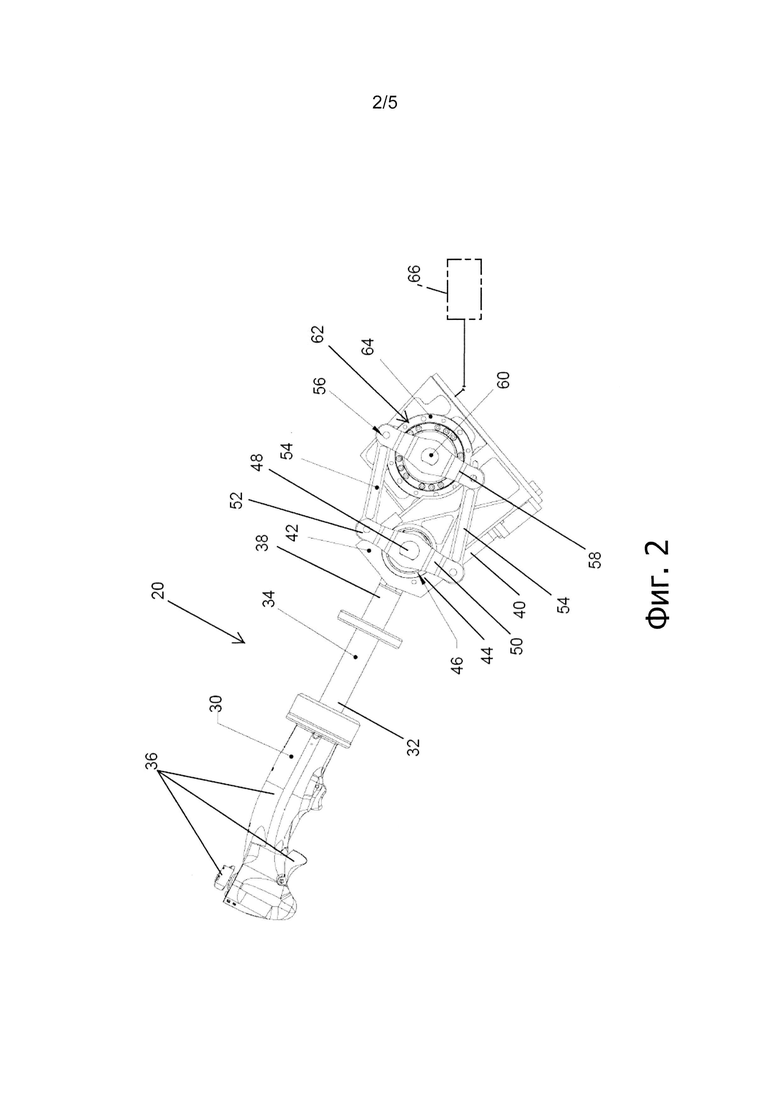
на фиг. 2 - узел инцептора, показанный на фиг. 1, вид сбоку слева;
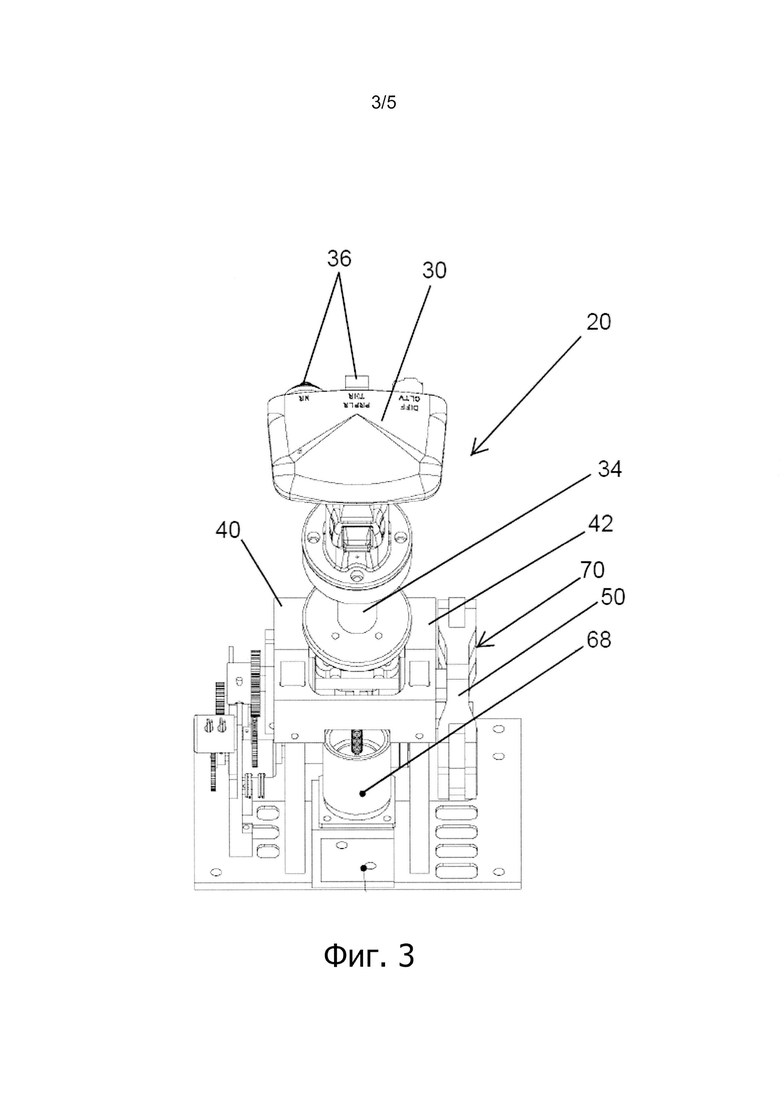
на фиг. 3 - узел инцептора, показанный на фиг. 2, вид в изометрии;
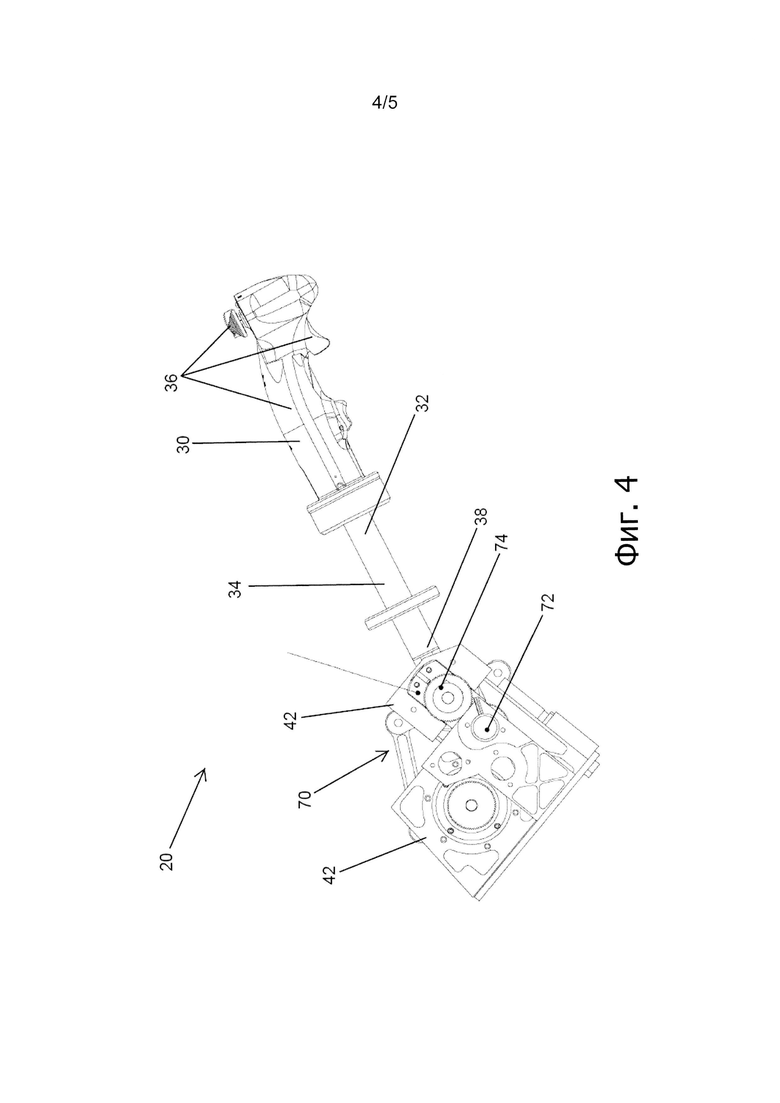
на фиг. 4 - узел инцептора, показанный на фиг. 1, вид сбоку справа;
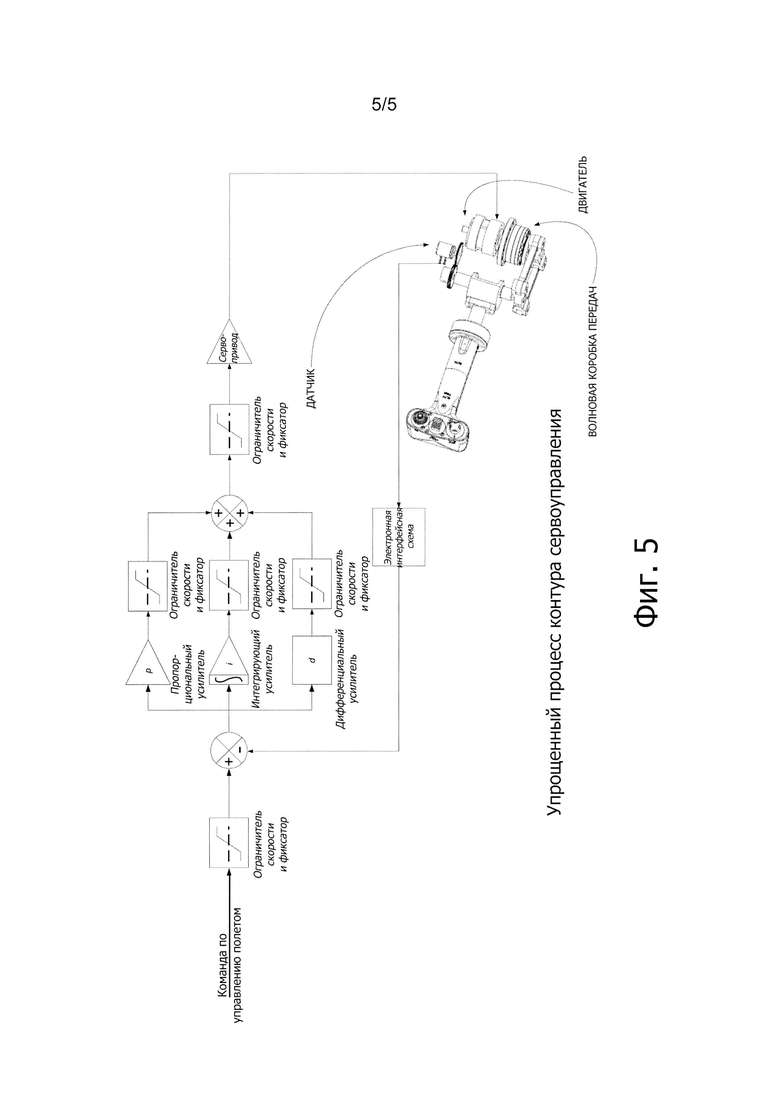
на фиг. 5 - блок-схема контура сервоуправления в соответствии с одним из вариантов осуществления изобретения.
Осуществление изобретения
На фиг. 1 схематично показана в общем виде система 10 управления вертолетом 12, выполненная с возможностью управления лопастями 14, кольцом 15 автомата перекоса и другими органами управления и/или механизмами. Система 10 управления включает в себя соединенные с системой 26 управления полетом общий узел инцептора 20, узел ручки 22 продольно-поперечного управления и узел 24 управления рулевым винтом. Общий узел инцептора 20 представляет собой узел автоматического электродистанционного управления общим шагом винта по меньшей мере согласно одному из вариантов осуществления изобретения. Дальнейшее описание относится к общему узлу инцептора вертолета, также узел инцептора в соответствии с изобретением может использоваться и в других транспортных средствах, включая летательные аппараты, космические аппараты, морские суда и наземные транспортные средства, для точного управлении транспортным средством во время эксплуатации, улучшая при этом управление и чувствительность транспортного средства оператором.
Как показано на фиг. 2, узел 20 инцептора включает в себя рукоятку 30, соединенную с дальним концом 32 регулируемого рычага 34 ручки «шаг-газ». Рукоятка 30 может включать в себя множество элементов 36 управления, таких как регулятор газа, переключатели, исполнительные устройства, кнопки, тумблеры или другие элементы управления, функционально соединенные с системой управления полетом или с другими системами транспортного средства. Рычаг 34 может регулироваться для получения различных кинематических радиусов поворота рычага, например, наиболее удобных для пилота, или для придания другого форм-фактора ручке 20.
Ближний конец 38 регулируемого рычага 34 соединен с неподвижным шарнирным узлом 40. Неподвижный шарнирный узел 40 выполнен с возможностью жесткого крепления к несущей конструкции вертолета 12 (фиг. 1) или иного транспортного средства. Узел 40 имеет корпус 42, в котором размещен ближний конец рычага, подшипники 44 и шестерни 46, позволяющие рычагу 34 плавно и контролируемо поворачиваться относительно корпуса 42.
Подшипники 44 и шестерни 46 соединены с центральным валом 48, к которому прикреплена центральная часть верхнего соединительного звена 50. Верхнее соединительное звено 50 своими свободными концами 52 соединено с парой тяг 54, каждая из которых соединена со свободными концами 56 нижнего соединительного звена 58. Нижнее соединительное звено 58 прикреплено своей средней частью к центральному валу 60, соединенному с волновой коробкой 62 передач. Верхняя и нижняя соединительные звенья 50 и 58 и тяги 54 образуют рычажный механизм, передающий вращательное движение центрального вала 48, вызванное поворотом рычага 34, во вращательное движение центрального вала 60 волновой коробки 62 передач.
Волновая коробка 62 передач в соответствии с представленным вариантом осуществления изобретения включает в себя гибкое зубчатое колесо, которое образует волновую зубчатую передачу 64 с большим передаточным отношением, конструкция которой позволяет устанавливать ее в относительно небольшом пространстве корпуса 42. В данном случае волновая коробка 62 передач имеет передаточное отношение, например, в диапазоне от 80:1 до 150:1. В других случаях волновая коробка 62 передач может иметь и большие передаточные отношения, сохраняя при этом небольшой размер. Волновая коробка 62 передач соединена с двигателем 66 (показан схематично), который управляется компьютером системы управления полетом и который соединен с кольцом 15 автомата перекоса и лопастями 14 винта (фиг. 1).
Волновая коробка 62 передач в представленном варианте осуществления изобретения соединена с двигателем 66 без использования управляемой муфты, так что такая конструкция обеспечивает прямое соединение между рычагом 34, волновой коробкой 62 передач и двигателем. Конструкция с возможностью обратного хода волновой коробки 62 передач без использования управляемой муфты может обеспечивать активное сопротивление перемещению рычага 34 ручки «шаг-газ» из положения, задаваемого компьютером управления полетом. Подобное прямое соединение и активное сопротивление позволяют пилоту физически чувствовать в реальном времени имитируемые усилия, связанные с усилиями, создаваемыми лопастями 14 в различных полетных условиях и ситуациях. В результате пилот значительно лучше и точней чувствует работу транспортного средства, в частности, в ситуациях, когда пилот принимает решение действовать в обход компьютера управления полетом, например, в экстренной ситуации или при маневре уклонения.
Соответственно, узел 20 инцептора обеспечивает управление всеми лопастями 14 винта за счет точного управления положением рычага 34, передавая при этом пилоту отклик по усилию. Узел 20 инцептора может работать или в полностью автоматическом режиме посредством команд от компьютера управления полетом, или допускает возможность ручной корректировки пилотом. Узел 20 инцептора также обеспечивает точное управление положением транспортного средства и откликом по усилию для пилота. Узел 20 инцептора также обеспечивает отклик по усилию исключительно за счет использования электромеханических приводных средств без использования каких-либо пружин.
Как показано на фиг. 3, узел 20 инцептора включает в себя демпфер 68 перемещений, например, пневматический демпфер, гидравлический демпфер или другие демпферные механизмы, соединенные с волновой коробкой 62 передач и/или с рычажным механизмом 70, образованным центральным валом 48, соединительными звеньями 50 и 58 и тягами 54 (фиг. 2). Демпфер 68 выполнен с возможностью ограничения или предотвращения избыточных перемещений рычага 34 ручки «шаг-газ», минимизируя или предотвращая избыточно высокую скорость ввода команд пилотом. Подобное демпфирование и управление скоростью задаваемых перемещений схоже с ощущениями, которые испытывает пилот при использовании традиционного рычага ручки управления с рычажным приводом.
Как показано на фиг. 4, узел 20 инцептора в соответствии с представленным вариантом осуществления изобретения может включать в себя датчик 72 угловых перемещений, соединенный с рычагом 34 ручки «шаг-газ» и выполненный с возможностью определения его углового перемещения. В представленном варианте датчик 72 угловых перемещений может быть выполнен в виде датчика холла, резистивного датчика или другого подходящего датчика, способного точно определять угловое перемещение рычага. Датчик 72 угловых перемещений соединен с шестерней 74 повышающей передачи, которая соединена с рычагом 34 ручки «шаг-газ». Шестерня 74 обеспечивает повышение разрешающей способности сопряженного с ней датчика 72 угловых перемещений или других соединенных с ней датчиков, обеспечивая тем самым больший диапазон динамического регулирования для повышения разрешающей способности датчика 72.
Как отмечено выше, узел 20 инцептора соединен с системой 26 управления полетом. В соответствии с одним из вариантов осуществления изобретения компьютер системы 26 управления полетом непрерывно отслеживает работу органов управления полетом, аэродинамических поверхностей и других полетных систем, помогая управлять и поддерживать управляемый и устойчивый полет. С этой целью система 26 управления полетом следит за узлом 20 инцептора для определения ее фактического положения (т.е. «где находится инцептор») и положения, в котором узел 20 инцептора должен находиться согласно указаниям или командам системы управления (т.е. «где инцептор должен находиться»). Соответственно, система 26 управления полетом непрерывно и динамично «задает» новые «положения» для рычага 34 узла инцептора на основании ряда параметров. Подобное динамическое движение осложняется тем, что пилот может свободно осуществлять ввод данных узлом 20 инцептора в любой момент, даже при полном несоответствии с тем, что указывает автоматический блок управления системы управления полетом. Обычно информация, относящаяся к тому «где находится инцептор», зачастую отличается от информации, относящейся к тому «где инцептор должен находиться».
Для разрешения данного противоречия и для того, чтобы узел 20 инцептора отражал фактическое положение и силы, действующие на летательный аппарат, и/или на которые летательный аппарат реагирует, для управления положением рычага 34 используется способ «замкнутого контура». В представленном варианте осуществления изобретения узел 20 инцептора использует Пропорционально-Интегрально-Дифференциальное (ПИД) регулирование. В связи с этим ПИД контур управления, контроллер системы 26 управления полетом получает запрос по заданной координате (в данном случае) от Системы Управления Полетом через Команду Управления Полетом и сравнивает заданную координату с результатами измерений, полученных от датчика 72 углового перемещения. Эту заданную координату можно рассматривать в качестве положения, которое, в целом, соответствует тому «где инцептор должен находиться», а результаты измерений можно рассматривать в качестве положения, которое, в целом, соответствует тому «где инцептор находится». Различие между заданной координатой и результатами измерений называется погрешностью ε. Контроллер выполнен с возможностью устранения данной погрешности ε таким образом, чтобы результаты измерений соответствовали заданной координате; другими словами, то «где инцептор находится» соответствует тому «где инцептор должен находиться».
В представленном варианте осуществления изобретения контур управления ПИД основан на Пропорциональной, Интегральной и Дифференциальной составляющих. Для более полного понимания следует отметить, что Пропорциональная составляющая относится к кратной константе. Одно число пропорционально другому, если существует константа «n» и выполняется условие y=nx. Подобное «n» может быть положительным или отрицательным, большим или меньшим единицы. Для контура управления в соответствии с изобретением Пропорциональная составляющая «n» задается KP, а параметр х является погрешностью ε управляющего контура, другими словами, y=KP(ε).
Специалисту в данной области техники должно быть понятно, что выходными данными Пропорциональной составляющей являются коэффициент «усиления» и измеренная погрешность ε. Чем больше будет «коэффициент усиления» Пропорциональной составляющей или погрешность, тем больше будут выходные данные Пропорциональной составляющей. Если коэффициент Пропорциональности будет слишком большим, то контроллер, как правило, будет постоянно перескакивать заданное значение, что приведет к нестабильности в виде колебаний. Если контур управления будет использовать лишь коэффициент Пропорциональности, то тогда погрешность ε станет слишком малой, а выходные данные контура станут ничтожными. Соответственно, даже когда контур Пропорциональности достигает устойчивого состояния, погрешность ε, тем не менее, останется. Чем больше будет коэффициент Пропорциональности, тем меньше будет погрешность устойчивого состояния; причем, чем больше будет коэффициент Пропорциональности, тем выше будет вероятность того, что контур станет неустойчивым. Данная дилемма вызывает погрешность устойчивого состояния, именуемую сдвигом. Поэтому для компенсации недостатков, присущих контуру управления на основе одной только Пропорциональности, управляющий контур использует другую составляющую, а именно Интегральную составляющую.
Интегральная составляющая относится к суммированию функции за определенный интервал. Что касается контроллера, Интегральная составляющая является суммой погрешности ε в течение времени, либо данный параметр можно выразить формулой y=∫f(ε)dt. Интегральная составляющая выступает в качестве «сумматора», в котором контур хранит все измеренные погрешности (∫ε). Следует отметить, что в подвижной системе погрешность ε обычно может быть положительной или отрицательной, поэтому иногда погрешность ε «добавляется» к сумматору (когда положительная погрешность ε добавляется к положительной погрешности, либо когда отрицательная погрешность ε добавляется к отрицательной), а иногда погрешность ε вычитается из сумматора, например, когда положительная погрешность добавляется к отрицательной или наоборот. Обычно сумматор почти всегда остается пустым. Даже когда погрешность ε настолько мала, что Пропорциональная составляющая больше не действует, блок Интегральной составляющей контура управления продолжает собирать погрешность ε до тех пор, пока погрешность ε не станет достаточной для принятия ее во внимание. После этого следующим шагом будет устранение сдвига устойчивого состояния. Поэтому узел инцептора и соответствующая система управления используют Интегральную составляющую для обеспечения стабильности устойчивого состояния.
В представленном варианте осуществления изобретения контур управления узлом инцептора и соответствующей системы управления включает в себя функцию сброса Интегральной составляющей для более быстрого достижения устойчивости. За счет сброса Интегральной составляющей, когда контур управления находится в устойчивом состоянии, контроллер движения выдает мгновенные спады для обнуления при очистке Интегрального сумматора или сброса иным образом.
Дифференциальная составляющая соответствует скорости изменения в течение определенного интервала времени и воспринимается ПИД контроллером, при этом параметр y выражается формулой y=d(ε)/dt. Дифференциальная составляющая используется для корректировки текущей погрешности относительно погрешности, полученной при последней проверке. Иными словами, Дифференциальная составляющая считает скорость изменения погрешности Δε. Чем больше меняется погрешность ε или чем больше увеличивается время дифференцирования, тем больше становится Дифференциальная составляющая. Дифференциальная составляющая используется для предотвращения любых перескоков, вызываемых Пропорциональной и Интегральной составляющими. Когда погрешность ε становится слишком большой, Пропорциональная и Интегральная составляющие будут выталкивать выходные данные контроллера. Отклик контроллера вызывает быстрое изменение погрешности ε, что в свою очередь заставляет Дифференциальную составляющую более активно противодействовать Пропорциональной и Интегральной составляющим. Поэтому в контуре управления используется Дифференциальная составляющая, позволяющая более активно противодействовать Пропорциональной и Интегральной составляющим. Кроме того, увеличение дифференцирующего времени позволяет Дифференциальной составляющей более активно тормозить выходные данные Пропорциональной и Интегральной составляющих.
Все три составляющие (П, И и Д) создают выходные данные на основе измеренной погрешности процесса, регулировка которого осуществляется. Предполагается, что в устойчивом контуре любые изменения погрешности, вызываемые изменением заданной координаты или нарушением процесса (например, действиями пилота), быстро устраняются комбинацией трех составляющих П, И и Д.
На фиг. 5 показана блок-схема упрощенного контура ПИД управления, используемого в по меньшей мере одном из вариантов осуществления изобретения. Следует отметить, что в контуре управления узла инцептора используются по меньшей мере несколько «ограничителей» (ограничители скорости или «фиксаторы»), добавленных для обеспечения параметров, выдаваемых системой или задаваемых пилотом и/или являющихся результатом вычислений П, И и Д, которые никогда бы не создавали выходных данных (или не принимали в качестве входных данных) величин, потенциально выходящих за диапазон режимов полета летательного аппарата или превышающих параметры производительности системы.
После того как транспортное средство достигает устойчивого состояния (как в режиме полета, так и в режиме зависания), система управления полетом может автоматически переходить (или переводиться) в «режим выравнивания». В этом режиме контур ПИД управления использует «фактическое» положение рычага 34 инцептора для определения того, куда следует «вернуться» в случае отклонения, во время приложения усилия-отклика, противодействующего отклонению, пропорционально величине смещения из «точки балансировки» в балансируемом режиме. Такое движение может быть вызвано действиями пилота и ему должно быть оказано противодействие с заданным усилием и скоростью движения, например, за счет преобразования тока двигателя, для устранения отклонения и возврата узла инцептора в «заданную координату», в которой она изначально находилась.
Если положения инцептора отличаются, то в «небалансируемом» режиме контур управления ПИД проверяет, чтобы система управления перемещением транспортного средства, находящаяся под контролем системы управления полетом, перемещала рычаг 34 в заданную координату (т.е. «где инцептор должен находиться»), отличающуюся от результата измерений (т.е. «где инцептор находится»). На фиг. 5 также показано, каким образом каждый из рассмотренных выше элементов способствует обеспечению «непрерывности и динамичности» регулируемого положения рычага (за счет использования двигателя и соединенной с ним напряженной волновой передачи (волновой зубчатой передачи с гибким звеном) на основании сообщаемого «положения рычага», определяемого датчиком. В соответствии с другим вариантом осуществления, использующим более сложную систему, можно добавить вторичный контур управления ПИД (в качестве контура внутри имеющегося контура или в виде каскадного контура) для управления индивидуальными аспектами работы системы, например пусковым током сервопривода.
Следует понимать, что описание конкретных вариантов осуществления изобретения приведено в качестве примера, и допустимы различные изменения, не выходящие за объем изобретения. Кроме этого, аспекты изобретения, рассмотренные в контексте конкретных вариантов его осуществления, в других вариантах могут комбинироваться или отсутствовать. Хотя преимущества определенных вариантов осуществления изобретения были рассмотрены в контексте подобных вариантов, преимуществами могут также обладать и другие варианты. Кроме этого, варианты, входящие в объем изобретения, не обязательно должны обладать всеми подобными преимуществами, поэтому изобретение ограничено только формулой изобретения.
Изобретение относится к средствам управления транспортными средствами. Узел управления транспортным средством содержит систему управления, включающую в себя узел ручки управления, содержащий рычаг с первым и вторым участками. К первому участку рычага прикреплен первый приводной вал, а ко второму участку рычага прикреплена рукоятка, расположенная на расстоянии от первого приводного вала. Рычаг с рукояткой установлен с возможностью поворота вокруг первой оси вращения. Узел управления включает волновую коробку передач, содержащую гибкое зубчатое колесо, соединенное со вторым приводным валом, расположенным на расстоянии от первого приводного вала. Второй приводной вал выполнен с возможностью вращения вокруг второй оси совместно с вращением гибкого зубчатого колеса. Рычажный механизм соединен с первым и вторым приводными валами так, что вращение второго приводного вала вокруг второй оси поворачивает рычажный механизм вокруг первой и второй осей вращения, вращая тем самым первый приводной вал вокруг первой оси. Достигается возможность обеспечения прямого, без управляемой муфты, соединения между двигателем, волновой коробкой передач, рычажным механизмом и рычагом управления. 3 н. и 22 з.п. ф-лы, 5 ил.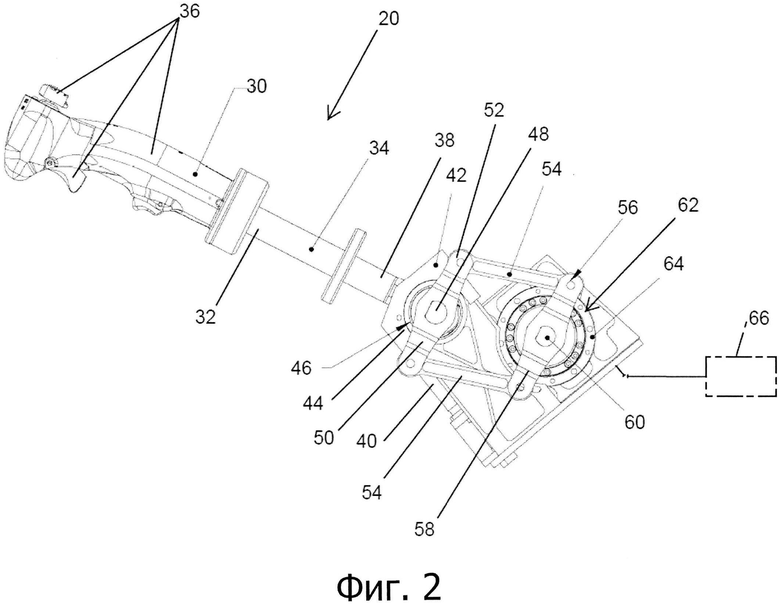
1. Узел управления транспортным средством, имеющим систему управления, включающий в себя:
узел ручки управления, содержащий рычаг с первым и вторым участками, причем к первому участку рычага прикреплен первый приводной вал, установленный с возможностью вращения вокруг первой оси, а ко второму участку рычага прикреплена рукоятка, расположенная на расстоянии от первого приводного вала и выполненная с возможностью ее захвата пользователем, при этом рычаг с рукояткой установлен с возможностью поворота вокруг первой оси вращения;
волновую коробку передач, содержащую гибкое зубчатое колесо, соединенное со вторым приводным валом, расположенным на расстоянии от первого приводного вала, причем второй приводной вал выполнен с возможностью вращения вокруг второй оси совместно с вращением гибкого зубчатого колеса;
рычажный механизм, соединенный с первым и вторым приводными валами так, что вращение второго приводного вала вокруг второй оси поворачивает рычажный механизм вокруг первой и второй осей вращения, вращая тем самым первый приводной вал вокруг первой оси; и
двигатель, по меньшей мере частично управляемый системой управления транспортным средством и связанный с гибким зубчатым колесом с обеспечением прямого, без управляемой муфты, соединения между двигателем, волновой коробкой передач, рычажным механизмом и рычагом управления, причем волновая коробка передач выполнена с возможностью обратного хода для активного сопротивления повороту рычага.
2. Узел управления по п. 1, в котором узел ручки управления представляет собой узел инцептора ручки «шаг-газ», а узел управления дополнительно содержит узел ручки продольно-поперечного управления и узел управления рулевым винтом, функционально соединенные с системой управления транспортным средством.
3. Узел управления по п. 1, в котором рукоятка содержит множество управляющих элементов, соединенных с системой управления транспортным средством.
4. Узел управления по п. 1, в котором рычаг ручки управления выполнен с возможностью регулировки.
5. Узел управления по п. 1, дополнительно содержащий неподвижный шарнирный узел, установленный на несущей конструкции транспортного средства и соединенный с первым приводным валом.
6. Узел управления по п. 5, в котором неподвижный шарнирный узел содержит подшипник и/или шестерню, соединенные с рычагом для обеспечения его плавного поворота относительно неподвижного шарнирного узла.
7. Узел управления по п. 1, в котором рычажный механизм представляет собой шарнирный четырехзвенник, при этом первое соединительное звено закреплено на первом приводном валу, второе соединительное звено закреплено на втором приводном валу, а первое и второе соединительные звенья соединены между собой парой тяг.
8. Узел управления по п. 1, дополнительно содержащий демпфер перемещений, соединенный с рычажным механизмом и/или с волновой коробкой передач.
9. Узел управления по п. 1, дополнительно содержащий датчик угловых перемещений, соединенный с рычагом и выполненный с возможностью определения его углового перемещения.
10. Узел управления по п. 9, дополнительно содержащий шестерню повышающей передачи, соединенную с датчиком угловых перемещений и с рычагом.
11. Узел управления по п. 1, в котором гибкое зубчатое колесо образует волновую зубчатую передачу.
12. Узел управления по п. 1, в котором гибкое зубчатое колесо образует волновую зубчатую передачу, передаточное отношение которой находится в диапазоне от 80:1 до 150:1.
13. Узел управления транспортным средством, имеющим систему управления, включающий в себя:
узел ручки управления, содержащий рычаг, выполненный с возможностью поворота вокруг первой оси вращения, и рукоятку, прикрепленную к рычагу и выполненную с возможностью ее захвата пользователем;
волновую коробку передач, имеющую гибкое зубчатое колесо, соединенное с приводным валом, расположенным на расстоянии от рычага и установленным с возможностью совместного вращения с гибким зубчатым колесом вокруг второй оси вращения, расположенной на расстоянии от первой оси вращения;
рычажный механизм, соединяющий между собой рычаг и приводной вал так, что поворот приводного вала вокруг второй оси вращения поворачивает рычажный механизм вокруг первой и второй осей вращения, вызывая тем самым поворот рычага вокруг первой оси вращения; и
двигатель, по меньшей мере частично управляемый системой управления транспортным средством и соединенный с гибким зубчатым колесом волновой коробки передач для его вращения, что обеспечивает прямое, без управляемой муфты, соединение между двигателем, волновой коробкой передач, рычажным механизмом и ручкой управления, причем волновая коробка передач выполнена с возможностью обратного хода для активного сопротивления повороту рычага.
14. Узел управления по п. 13, в котором узел ручки управления представляет собой узел инцептора ручки «шаг-газ» и дополнительно содержащий узел ручки продольно-поперечного управления и узел управления рулевым винтом, функционально соединенные с системой управления транспортным средством.
15. Узел управления по п. 13, дополнительно содержащий опорную конструкцию, выполненную с возможностью установки на несущей конструкции транспортного средства, при этом в опорной конструкции установлен с возможностью вращения первый приводной вал.
16. Узел управления по п. 13, в котором рычажный механизм представляет собой шарнирный четырехзвенник, при этом первое соединительное звено закреплено на рычаге с возможностью поворота вокруг первой оси вращения, второе соединительное звено закреплено на приводном валу, а первое и второе соединительные звенья соединены между собой парой тяг.
17. Узел управления по п. 13, дополнительно содержащий демпфер перемещений, соединенный с рычажным механизмом и/или с волновой коробкой передач.
18. Узел управления по п. 13, дополнительно содержащий датчик угловых перемещений, соединенный с рычагом и выполненный с возможностью определения его углового перемещения.
19. Узел управления по п. 13, дополнительно содержащий шестерню повышающей передачи, соединенную с рычагом.
20. Узел управления по п. 13, в котором гибкое зубчатое колесо образует волновую зубчатую передачу, передаточное отношение которой находится в диапазоне от 80:1 до 150:1.
21. Узел инцептора ручки «шаг-газ» транспортного средства, имеющего систему управления, содержащий:
опорную конструкцию, установленную на транспортном средстве;
первый приводной вал, установленный в опорной конструкции с возможностью вращения вокруг первой оси вращения;
рычаг ручки «шаг-газ», соединенный у первого конца с первым приводным валом и выполненный с возможностью поворота совместно с первым приводным валом относительно опорной конструкции вокруг первой оси вращения;
рукоятку, соединенную со вторым концом рычага ручки «шаг-газ», расположенным на расстоянии от первого конца, причем рукоятка содержит множество элементов управления, соединенных с системой управления транспортным средством и выполненных с возможностью захвата пользователем для управления по меньшей мере частью транспортного средства;
волновую коробку передач, соединенную с опорной конструкцией и содержащую по меньшей мере одну волновую зубчатую передачу и второй приводной вал, причем волновая зубчатая передача и второй приводной вал выполнены с возможностью вращения относительно опорной конструкции вокруг второй оси вращения, расположенной на расстоянии от первого приводного вала;
рычажный механизм, соединяющий между собой первый и второй приводные валы с возможностью передачи поворотного движения первого приводного вала второму приводному валу;
двигатель, по меньшей мере частично управляемый системой управления транспортным средством и соединенный с волновой коробкой передач без использования управляющей муфты, обеспечивая прямое соединение между рычагом ручки «шаг-газ», рычажным механизмом, волновой коробкой передач и двигателем, причем волновая коробка передач выполнена с возможностью обратного хода для активного сопротивления повороту рычага ручки «шаг-газ».
22. Узел инцептора по п. 21, в котором рычажный механизм представляет собой шарнирный четырехзвенник, при этом первое соединительное звено прикреплено к первому приводному валу с возможностью поворота вокруг первой оси вращения, второе соединительное звено прикреплено ко второму приводному валу с возможностью поворота вокруг второй оси вращения, а первое и второе соединительные звенья соединены между собой парой тяг.
23. Узел инцептора по п. 22, дополнительно содержащий демпфер перемещений, соединенный с рычажным механизмом и/или с волновой коробкой передач.
24. Узел инцептора по п. 21, дополнительно содержащий датчик угловых перемещений, соединенный с рычагом, и шестерню повышающей передачи, соединенную с датчиком угловых перемещений и с рычагом ручки «шаг-газ».
25. Узел инцептора по п. 21, в котором волновая зубчатая передача имеет передаточное отношение в диапазоне от 80:1 до 150:1.
| US 2009314884 A1, 24.12.2009 | |||
| US 5125602 A, 30.06.1992 | |||
| US 2010025539 A1, 04.02.2010 | |||
| РУЧКА ПРОДОЛЬНО-ПОПЕРЕЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1994 |
|
RU2089448C1 |

