ВСПОМОГАТЕЛЬНАЯ ИНФОРМАЦИЯ
ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к системам управления полетом для летательных аппаратов, а в частности, к вариантам осуществления для управления активной ручкой пилота, которая обеспечивает переменное тактильное восприятие, усиление мощности для управляемых вручную механических органов управления полетом, переход на ручное управление полетом, способность функционирования в режиме автопилота и беспилотного полета.
УРОВЕНЬ ТЕХНИКИ
[002] Многие летательные аппараты, в которых используются механические органы управления полетом, не имеют бустерной системы усиления мощности. Это требует от пилота реагирования на все летные нагрузки при перемещении органов системы управления (рукояток, ручек, педалей, штурвальных колонок и т.д.), что может привести к высокой рабочей нагрузке на пилота и его усталости. В такие системы обычно не включаются решения по технологии активной ручки, обеспечивающей пилота обратной связью тактильными ощущениями, способствующей уменьшению рабочей нагрузки на пилота, повышению управляемости и предупреждению пилота о наступлении небезопасных условий полета и конструктивных ограничениях. Существующие системы управления полетом обычно имеют независимые приводы, предназначенные для обеспечения независимых функций управления автопилотом, усиления мощности, тактильного восприятия/управления с использованием активной ручки (инцептора) и управление полетом в беспилотном режиме. Как правило, активная ручка используется только с системами электродистанционного управления (Fly-by-Wire).
[003] Чисто механические системы управления полетом обеспечивают прямое присоединение систем управления с вводом от пилота и второго пилота посредством механического рычажного механизма к поверхности управления. Пилот физически перемещает поверхность управления в необходимое положение посредством рычажного механизма. Система этого типа не обеспечивает ни управление автопилотом, ни усиление мощности, ни обратную тактильную связь для пилота, ни способность выполнять беспилотный полет.
[004] Дополнение базовой механической системы управления полетом приводом, имеющим гидравлический усилитель мощности, приводит к уменьшению рабочей нагрузки на пилота и его усталости. Бустерный привод увеличивает усилие, прикладываемое пилотом к ручке управления для выдачи команды. Для небольших летательных аппаратов система управления этого типа также может включать в себя переход на ручное управление в случае прекращения подачи энергии на привод. В случае прекращения подачи гидравлической энергии усилие пилота передают механически непосредственно через поршень привода без усиления мощности. В некоторых летательных аппаратах нагрузки на управление настолько велики, что пилот не может управлять летательным аппаратом без усиления мощности. В конструкциях таких типов для управления полетом необходим привод с усилением мощности, который обычно выполняется с резервированием или избыточностью (имеет более одного поршня).
[005] Также используются системы электродистанционного управления, которые включают в себя ручки пилотов с датчиками положения, компьютеры управления полетом и избыточные силовые приводы для перемещения различных поверхностей. Выходные сигналы от датчиков положения ручки передаются в компьютеры управления полетом, которые затем подают сигнал на получающий энергию привод для управления позиционированием. Приводы обычно получают гидравлическую и/или электрическую энергию для выработки необходимых усилий. Эта конструкция уменьшает усталость пилота, поскольку пилоту не приходится реагировать на аэродинамические нагрузки, трение, сопровождающее механическое управление/демпфирование, инерцию или другие нагрузки в системе управления. Поскольку система этого типа обычно не включает в себя переход на ручное управление, она зависит от сложных избыточных электронных устройств и программного обеспечения/прошивки для обеспечения работоспособности в случае отказов.
[006] Все эти системы могут включать в себя дополнительный привод автопилота. Привод автопилота обычно имеет муфту и муфту скольжения (или пружинный амортизатор), чтобы обеспечивать пилоту возможность преодолеть отказ в системе автопилота, обеспечивающей для него выполнение полета. Эта система не обеспечивает ни обратную тактильную связь для пилота, ни способность выполнять беспилотный полет.
[007] Активные ручки (инцепторы) могут быть добавлены в системы электродистанционного управления с датчиками положения ручки, датчиками усилия на ручке и двигателями электроприводов ручек. Эти датчики и двигатели обеспечивают для пилота тактильное восприятие, а также могут быть использованы для управления автопилотом. Сигналы от датчиков ручек передают в компьютеры управления полетом, которые затем подают сигнал на получающие энергию приводы для управления позиционированием.
[008] Примеры систем привода с усилением и с активными ручками (инцепторами) раскрыты в патенте США №7,108,232, озаглавленном "Вертолетная система восприятия усилий и увеличения устойчивости с параллельным сервоприводом" (Helicopter Force-Feel and Stability Augmentation System with Parallel Servo Actuator), и патенте США № 9,381,998, озаглавленном "Устройство выдачи тактильной информации" (Tactile Cueing Apparatus). В этих известных системах требуются отдельные приводы для обеспечения тактильного восприятия с использованием активного инцептора и усиления мощности в системе управления.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[009] Приводимые в качестве примера варианты осуществления обеспечивают комбинированную систему активной ручки и бустерного привода управления для поверхности управления, при этом система имеет ручку управления, взаимодействующую с механической конструкцией управления полетом с помощью рычажного механизма, выполненного с возможностью перемещения поверхности управления. С рычажным механизмом взаимодействует устройство механической связи, который имеет соединение ручки управления. Встроенный привод соединен с возможностью отсоединения с устройством механической связи между соединением ручки управления и рычажным механизмом. Датчик усилия на ручке выполнен с возможностью обеспечения выдачи сигнала усилия на ручке в ответ на усилие, оказываемое на ручку управления. Система управления полетом принимает сигнал усилия на ручке и выполнена с возможностью выдачи сигнала управления положением привода на встроенный привод с перемещением встроенного привода в предписанное положение в соответствии с профилем восприятия усилия. Датчик положения привода обеспечивает выдачу сигнала положения привода в систему управления полетом, а система управления полетом также выполнена с возможностью замыкания контура позиционирования в ответ на сигнал положения привода.
[0010] Приводимые в качестве примера варианты осуществления обеспечивают возможность реализации способа управления поверхностью управления. Усилие на ручке регистрируют датчиком усилия на ручке, и вырабатывают сигнал входного усилия. Применяют профиль восприятия усилия, обеспечивают выдачу команды позиционирования привода. Команду динамического позиционирования для привода суммируют с отрицательным сигналом положения привода для обеспечения выдачи команды ошибки по положению в контроллер привода. Затем контроллер привода выдает сигнал управления положением привода. Встроенный привод выполняет перемещение в ответ на сигнал управления положением привода, обеспечивающего получение выходного усилия или крутящего момента. Это выходное усилие или этот выходной крутящий момент приводит к физическому воздействию силы, вызывающей ускорение, на массу системы с соответствующей скоростью и изменениями положения. Датчик положения привода обеспечивает выдачу сигнала обновленного положения привода для замыкания контура позиционирования.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Указанные признаки, функции и преимущества могут быть реализованы независимо в различных вариантах осуществления или могут быть скомбинированы с получением других вариантов осуществления, дополнительные подробности которых могут быть очевидными при обращении к последующему описанию и чертежам.
[0012] На ФИГ. 1 схематически представлен примерный вариант осуществления комбинированной системы активной ручки и бустерного привода управления;
[0013] на ФИГ. 2 приведена схема сервоконтура элементов управления для примерного варианта осуществления;
[0014] на ФИГ. 3 графически представлена зависимость усилия на ручке от профиля положения ручки, используемого в примерных вариантах осуществления;
[0015] на ФИГ. 4А схематически представлен вариант осуществления одноканального электропривода;
[0016] на ФИГ. 4В схематически представлен вариант осуществления двухканального электропривода;
[0017] на ФИГ. 5А схематически представлен вариант осуществления одноканального гидропривода;
[0018] на ФИГ. 5В схематически представлен вариант осуществления сдвоенного канала управления с одноканальным гидроприводом;
[0019] на ФИГ. 5С схематически представлен вариант осуществления альтернативного сдвоенного канала управления и сдвоенного гидропривода; и
[0020] на ФИГ. 6 представлена блок-схема способа работы вертолетной системы управления, в которой использованы раскрытые варианты осуществления изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0021] Примеры вариантов осуществления, описанные в настоящем документе, обеспечивают создание комбинированной системы активной ручки и бустерного привода управления, имеющей функциональность активной ручки (инцептора) для тактильного информирования пилота и функциональность усиления мощности для компенсации нагрузок поверхности управления, с тем чтобы изолировать ручку управления пилота посредством встроенного привода, механически соединенного с механической системой управления полетом, не имеющей бустерного усиления.
[0022] Для целей описания и для упрощения в настоящем документе показана одна ось управления, при этом имеется множество осей управления (например, общим шагом, тангажом, креном и рысканием) многочисленными управляющими поверхностями, для каждой из которых могут быть использованы описанные варианты осуществления. Термин "ручка" используемый в настоящем документе, означает любое устройство управления пилота, используемое для управления траекторией полета летательного аппарата (т.е. штурвальная колонка, педали руля направления или другое устройство ввода сигналов управления или инцептор).
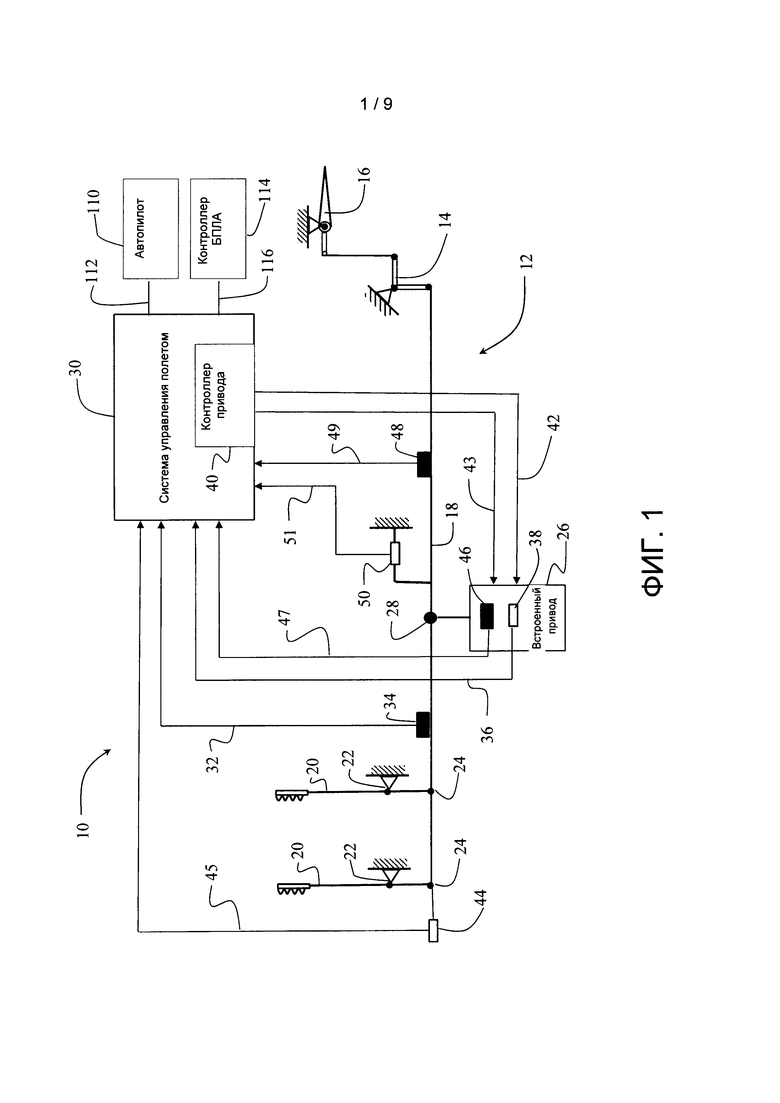
[0023] Со ссылкой на чертежи, на ФИГ. 1 схематически представлен примерный вариант осуществления комбинированной системы 10 активной ручки и бустерного привода управления. Система 10 включает в себя механическую конструкцию 12 управления полетом, в которой используется рычажный механизм 14, подсоединенный для обеспечения манипулирования поверхностью 16 управления. Устройство 18 механической связи, которое может представлять собой тросы или одну или более тяг управления, соединяет одну или более ручек 20 управления (ручку управления пилота и ручку управления второго пилота в показанном варианте осуществления) с рычажным механизмом 14. В режиме механического управления полетом перемещение пилотом ручки 20 управления, действующей в качестве рычага, поворачиваемого вокруг точки 22 поворота, на соединение 24 ручки с воздействием на устройство 18 механической связи, вызывает поступательное перемещение устройства 18 механической связи с позиционированием рычажного механизма 14 для необходимого позиционирования поверхности 16 управления.
[0024] Встроенный привод 26 соединен с устройством 18 механической связи механическим соединителем 28 между соединением 24 ручки и рычажным механизмом 14. Соединение привода 26 с механическим соединителем 28 является отсоединяемым или съемным, как будет описано более подробно впоследствии. Механический соединитель 28 может представлять собой поворотное соединение или рычажный узел в зависимости от вида встроенного привода 26. Система 30 управления полетом принимает сигнал 32 входного усилия от датчика 34 усилия на ручке, соединенного для регистрации усилия, приложенного ручкой 20 управления к устройству 18 механической связи. Система 30 управления полетом также принимает сигнал 36 положения привода от датчика 38 положения привода, связанного со встроенным приводом 26. Контроллер 40 привода в системе 30 управления полетом выдает сигнал 42 управления положением привода на встроенный привод 26 в ответ на сигнал 32 входного усилия и сигнал 36 положения привода. Отклик встроенного привода 26 на сигнал 42 управления положением привода вызывает приложение усилия на механическом соединителе 28 посредством встроенного привода 26, который обеспечивает усиление мощности через устройство 18 механической связи для поверхности 16 управления посредством рычажного механизма 14 с одновременным обеспечением обратной тактильной связи для ручки 20 управления через устройство 18 механической связи. Контроллер привода также может выдавать сигнал 43 отсоединения по обнаружению отказа или заклинивания во встроенном приводе 26. Нейтрализация последствий заклинивания осуществляется за счет использования рассоединительного устройства (например, устройства отсоединения, муфты, срезного штифта или другого совместимого устройства), которое отделяет встроенный привод 26 от механического соединителя 28 и приводит к возврату системы в ручной режим прямого механического управления, в котором тактильная информация не выдается и усиление мощности при работе отсутствует, как будет описано более подробно далее.
[0025] Дополнительный входной сигнал в систему 30 управления полетом может быть обеспечен датчиком 44 положения ручки, вводящим сигнал 45 положения ручки, который дополняет данные, обеспечиваемые датчиком 34 усилия на ручке, путем добавления физического положения ручки, а также приложенного усилия. Схожим образом, может быть использован датчик 46 усилия привода, с тем чтобы осуществить выдачу сигнала 47 усилия привода с информацией об усилии или крутящем моменте, действующем от встроенного привода 26 на механический соединитель 28. Кроме того, датчик 48 усилия на поверхности управления, регистрирующий усилие, оказываемое на механическую конструкцию 12 управления полетом поверхностью 16 управления, может обеспечивать сигнал 49 усилия на поверхности управления. Дополнительная регистрация положения может быть обеспечена датчиком 50 положения управляющего рычажного механизма, регистрирующим фактическое положение устройства 18 механической связи в варианте осуществления, показанном на чертежах, для обеспечения сигнала 51 положения рычажного механизма.
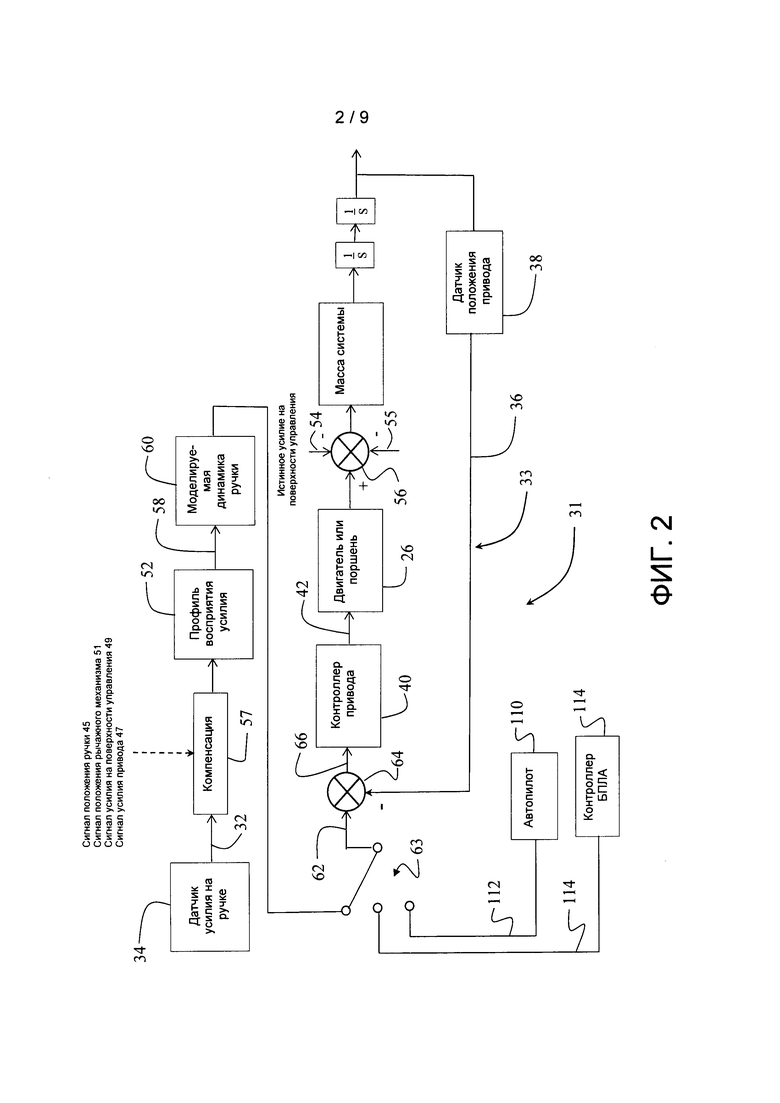
[0026] В системе 30 управления полетом используется основной сервоконтур 31, как показано на ФИГ. 2. Сервоконтур 31 может быть реализован в системных программах в микропроцессоре общего назначения, в виде программируемых вентильных матриц, прошивки или в других форматах в комбинированных или распределенных модулях (обычно называемых в настоящем документе "модулями"). Сервоконтур 31 включает в себя модуль, который принимает или считывает сигнал 32 усилия на ручке от датчика 34 усилия на ручке и выдает команды на встроенный привод 26 через контроллер 40 привода на переход в предписанное положение в соответствии с выбранным профилем 52 восприятия усилия (подробно раскрыто далее в отношении ФИГ. 3). Затем встроенный привод 26 и система 30 управления полетом выполняют замыкание контура 33 позиционирования с использованием сигнала 36 положения привода от датчика 38 положения привода, что приводит к очень небольшой ошибке положения ручки, даже когда нагрузки поверхности управления, представленные истинным усилием 54 на поверхности управления, и усилие 55 на ручке, прилагаемое пилотом, приложены ко всей механической системе 12, 14, 16, 18 и 20 управления, как представлено сумматором 56. После вычитания истинного усилия 54 на поверхности управления и истинного усилия 55 на ручке из выходного усилия двигателя в суммирующем соединении 56, остаточная сила приводит к ускорению массы механической системы 12 управления, которую затем подвергают двойному интегрированию (1/S∧2), приводящему в результате к позиционированию привода согласно считыванию датчиком 38 положения.
[0027] Команда от датчика усилия на ручке (сигнал 32 датчика усилия на ручке) может быть дополнена дополнительными модулями для компенсации 57 до преобразования указанной команды усилия в команду 58 позиционирования для привода по восприятию усилия с использованием выбранного профиля 52 восприятия усилия. Компенсация 57, для которой используют сигнал 45 положения ручки, сигнал 47 усилия привода, сигнал 49 усилия на поверхности управления и сигнал 51 положения управляющего рычажного механизма, может быть использована для корректировки истинных инерционных проявлений системы, согласования привода, согласования рычажных механизмов, гистерезиса, свободного хода, демпфирования, соотношения сигнал/шум, нежелательной обратной связи и других нелинейностей во всей механической, гидравлической и/или электрической системе, что улучшает динамическую стабильность, уменьшает ошибку положения ручки и обеспечивает улучшенные характеристики восприятия усилия (производительность).
[0028] Команду 58 позиционирования для привода по восприятию усилия (включающую в себя компенсацию 57) затем используют для вычисления необходимой динамики 60 ручки для выдачи команды 62 динамического позиционирования для привода, которая обеспечивает необходимое смоделированное (искусственное) восприятие инерции и демпфирование ручки. В приводимом в качестве примера варианте осуществления для создания необходимой моделируемой динамики ручки используют динамическую модель второго порядка. Затем команду динамического позиционирования для привода подают через суммирующее соединение 64 для позиционирования привода, которое приводит к сигналу 66 ошибки положения, передаваемому в контроллер 40 привода, который обеспечивает ток двигателя или давление гидропривода, как будет описано ниже, в качестве сигнала 42 управления положением привода, подаваемого на встроенный привод 26. В альтернативных вариантах осуществления может быть произведено комбинирование компенсации и моделируемой динамики ручки, и эта комбинация может быть подана в чередующихся позициях в сервоконтуре 31 (в альтернативном примере осуществления - на суммирующем соединении 64 для позиционирования привода). Основное замыкание контура 33 позиционирования альтернативно может использовать сигнал 45 положения ручки или сигнал 57 положения управляющего рычажного механизма в зависимости от учета импеданса системы.
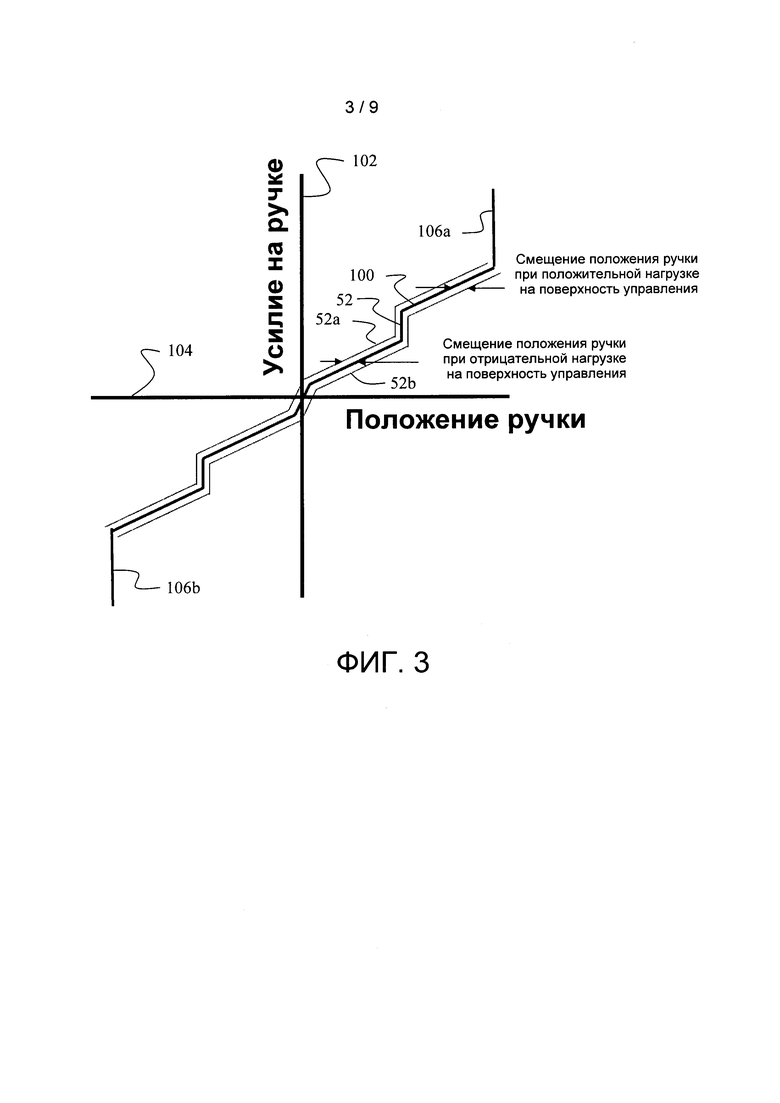
[0029] Как видно из ФИГ. 3, сервоконтур 31 обеспечивает взаимосвязь "восприятие усилия" на ручке посредством одного или более модулей, представленных профилем 52 восприятия усилия. Профиль восприятия усилия корректируют в реальном времени на основании конкретных потребностей для решения задач и условий полета. Например, система 30 управления полетом может предупреждать пилота о превышении определенного положения вследствие предельного значения для летательного аппарата (например, крутящего момента двигателя) посредством корректировки профиля 52 восприятия усилия с получением плавной остановки 100 в этом положении. Другие примеры включают в себя смещения, изменения усиления, плавные остановки и остановки с резким торможением.
[0030] При рассмотрении влияния внешних нагрузок могут быть небольшие ошибки статического положения в ручке 20 и соответствующем сигнале 45 положения ручки в зависимости от того, как замкнут сервоконтур. Например, при рассмотрении случая, когда пилот отпускает ручку (усилие 102 на ручке равно нулю), и при данном профиле 52 восприятия усилия на ручке, как показано на ФИГ. 3, встроенный привод 26 будет перемещать ручку в нулевое положение 104. При приложении внешней нагрузки к поверхности управления с полярностью, которая стремится переместить положение ручки в отрицательном направлении, произойдет очень небольшое отрицательное движение ручки, которое приведет к выработке сигнала ошибки положения, достаточного для реагирования на полетную нагрузку и удерживания привода вблизи нуля. На ФИГ. 3 приведена схема, на которой с увеличением показано, как внешняя отрицательная нагрузка на поверхность управления приведет к небольшому смещению профиля восприятия усилия влево, как представлено профилем 52а. Пилот может противодействовать нагрузке на поверхность управления посредством приложения положительной нагрузки на ручку, которая будет перемещать привод в положительном направлении, или может добавить отрицательную нагрузку на ручку, которая будет перемещать привод в отрицательном направлении, следуя по отклоненному профилю восприятия усилия. И наоборот, если нагрузка на поверхность управления оказывается в положительном направлении, профиль восприятия усилия будет сдвинут вправо, как представлено профилем 52b. Такая конструкция сервоконтура 31 по существу обеспечивает необходимое восприятие усилия, и при этом встроенный привод 26 противодействует почти всей нагрузке от поверхности 16 управления, сообщаемой в механическую конструкцию 12 управления полетом, с обеспечением таким образом функциональности усиления мощности. Альтернативное решение для получения почти нулевой ошибки положения ручки заключается в использовании интегратора в сервоконтуре 31, который непрерывно стремится свести ошибку 66 положения привода к нулю.
[0031] С точки зрения высокочастотной динамической нагрузки оба подхода будут включать в себя некоторую динамическую ошибку положения ручки, которая может привести к небольшой вибрации ручки (проникание сигнала нагрузки на поверхность управления). Высокочастотные динамические нагрузки несущего винта вертолета, например, отфильтровываются физически вследствие относительно высокого импеданса, создаваемого инерцией механической конструкции 12 управления полетом. Пилот осуществляет силовое реагирование через ручку 20 на эту обратную связь по остаточной нагрузке при управлении летательным аппаратом с использованием механической системы управления полетом. Добавление инерции комбинированной системы 10 активной ручки и бустерного привода управления приводит к дополнительному уменьшению обратной связи по нагрузке на поверхность управления (или проникание сигнала) в ручке 20. По существу, обратная динамическая связь по нагрузке в ручку 20 сводится к минимуму, что приводит к желаемому восприятию усилия.
[0032] Контроллер 40 привода показанного варианта осуществления может быть встроен в систему 30 управления полетом в компьютере управления полетом летательного аппарата или может представлять собой отдельный микропроцессор и вспомогательную схему, предназначенные для встроенного привода 26 и находящиеся внутри его, или могут иметь совместно используемые элементы в обоих случаях, в зависимости от общей архитектуры системы. Например, компьютер управления полетом летательного аппарата может вычислять профиль восприятия усилия на основании датчиков состояния летательного аппарата (т.е. высоты, воздушной скорости, скоростей изменения параметров и т.д.), в то время как контроллер 40 привода, расположенный внутри встроенного привода 26, выполняет замыкание сервоконтура позиционирования, обнаружение неисправности привода и его изоляцию в качестве системы интеллектуального привода.
[0033] Возможны несколько подходов к обнаружению заклинивания во встроенном приводе 26. Простой подход заключается в объявлении заклинивания, если сигнал 32 входного усилия превышает пороговое значение максимального ожидаемого усилия на ручке - либо положительное пороговое значение 106а, либо отрицательное пороговое значение 106b, как видно из ФИГ. 2 (т.е. пилот не может перемещать ручку). Этот подход требует только использования датчика 34 усилия на ручке. При превышении порогового значения 106а, 106b система 30 управления полетом активирует сигнал 43 отсоединения для удаления встроенного привода 26 из системы.
[0034] Более явный способ заключается в сравнении выходного усилия (крутящего момента) встроенного привода 26, сигнала 47 усилия привода от датчика 46 усилия привода, с суммой усилия на ручке (сигнал 32 входного усилия) и нагрузок на поверхность управления, сигналом 49 усилия на поверхности управления. В этом случае используются три датчика усилий - датчик 34 усилия на ручке, датчик 46 усилия привода и датчик 48 усилия на поверхности управления. Поскольку выходное усилие (крутящий момент) встроенного привода 26 никогда не должно превышать максимальную ожидаемую нагрузку на поверхность управления плюс максимальная ожидаемая нагрузка на ручку, это обеспечивает значительный пороговый запас для предотвращения отказов в работе.
[0035] Еще один подход заключается в объявлении заклинивания встроенного привода 26, выполненного с электродвигателем, описанного далее, если выходной ток двигателя превышает максимальную ожидаемую нагрузку на поверхность управления (что включает в себя инерционное ускорение), как обозначено сигналом 49 усилия на поверхности управления, плюс максимальная ожидаемая нагрузка на ручку, как обозначено сигналом 32 входного усилия. Этот подход не требует каких-либо дополнительных датчиков (поскольку ток обычно доступен для замыкания контура двигателя и мониторинга по току).
[0036] Еще один подход заключается в сравнении команды динамического позиционирования для привода, сигнала 62 управления положением привода, с измеренным сигналом 36 положения привода (или сигналом 51 положения управляющего рычажного механизма). Этот подход должен учитывать наихудшую ошибку нормального позиционирования, которая возникает в результате какой-либо ошибки отслеживания положения встроенного привода 26 под воздействием ручки и нагрузок на поверхность управления (например, усилия, используемого для ускорения).
[0037] При обнаружении ситуации заклинивания с использованием любого из приводимых в качестве примера способов обнаружения система 30 управления полетом выдаст сигнал 43 отсоединения через контроллер 40 привода, что обеспечит возможность перехода в режим чисто механической системы управления полетом с прямым соединением ручки 20 управления через механическую конструкцию 12 управления полетом с поверхностью 16 управления.
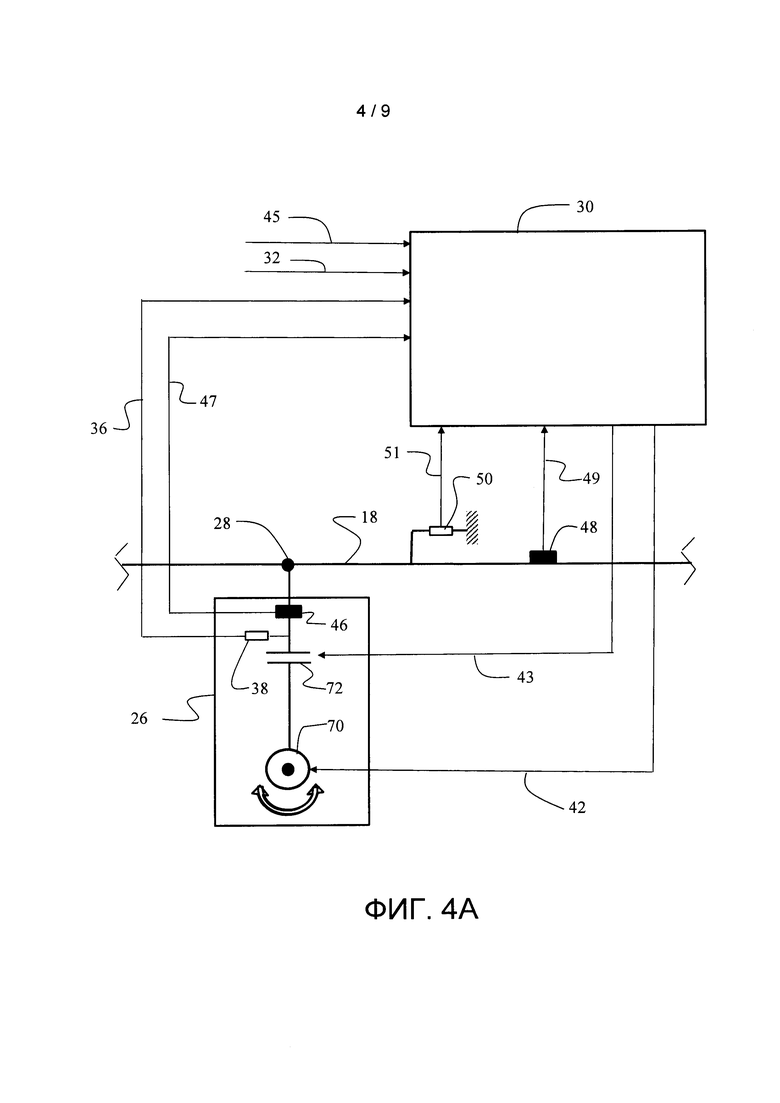
[0038] Комбинированная система 10 активной ручки и бустерного привода управления в первом примерном варианте осуществления может использовать электродвигатель 70 (с соответствующими редукторами, датчиками и другими компонентами) во встроенном приводе 26, как видно из ФИГ. 4А. Сигнал 42 управления положением привода для электродвигателя 70 является управляемым токовым входом, обеспечивающим двунаправленное вращение электродвигателя 70. Сигнал 43 отсоединения приводит к отключению муфты 72 для физического отсоединения электродвигателя 70 от механического соединителя 28 при определении неисправности или ситуации заклинивания в электродвигателе 70, тем самым обеспечивая для механической конструкции 12 управления полетом возможность работы с прямой подачей сигналов от ручки 20 управления через устройство 18 механической связи.
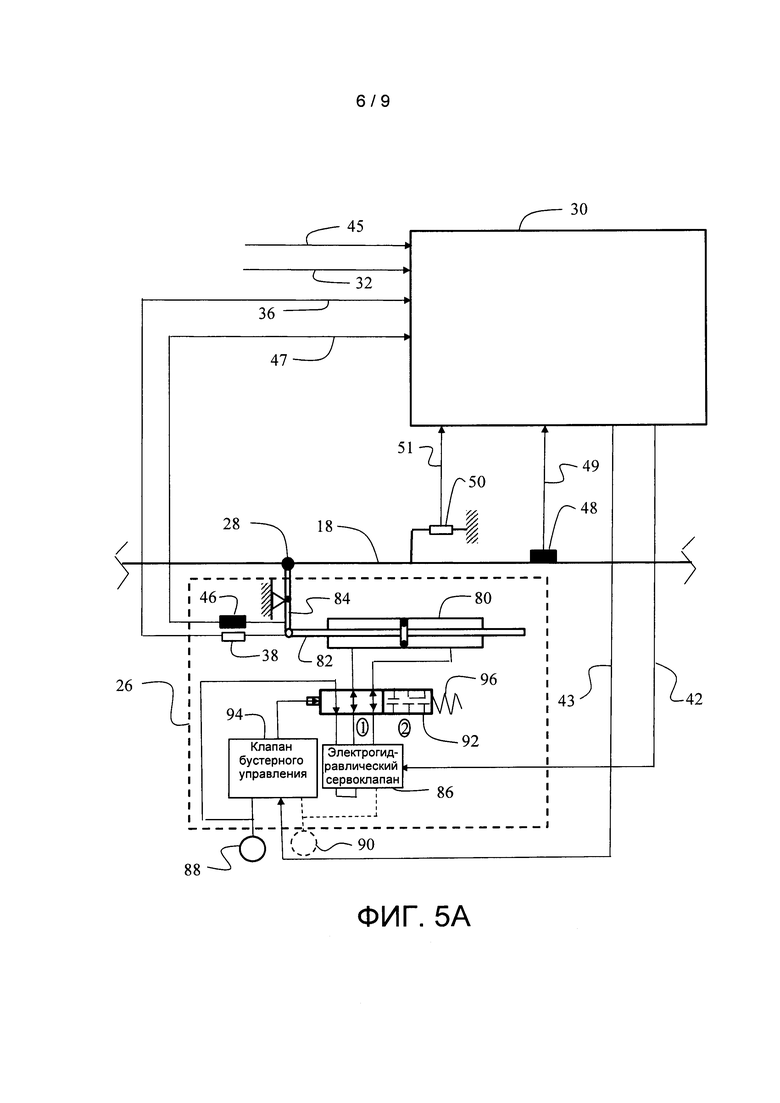
[0039] Комбинированная система 10 активной ручки и бустерного привода управления во втором примерном варианте осуществления может использовать гидравлическое приведение в действие во встроенном приводе 26. Как видно из ФИГ. 5А, гидроцилиндр 80 с приводным стержнем 82 соединен посредством шарнирного рычага 84 с механическим соединителем 28 (или непосредственно с устройством 18 механической связи в качестве замены механического соединительного устройства). Электрогидравлический сервоклапан 86 принимает сигнал 42 управления положением привода от системы 30 управления полетом и управляет давлением и потоком от гидравлического насоса (или другого источника давления) 88 с возвратом 90 через запорно-перепускной клапан 92 в гидроцилиндр 80. В качестве альтернативы электрогидравлическому сервоклапану 86 может быть использован сервоклапан прямого привода. Клапан 94 бустерного управления принимает сигнал 43 отсоединения и после активации в случае отказа ослабляет давление от запорно-перепускного клапана 92, что позволяет пружине 96 сдвинуть запорно-перепускной клапан 92 из положения 1 нормальной работы в положение 2 запирания-перепуска, обеспечивающего возможность свободного поступательного перемещения приводного стержня 82 в цилиндре, как известно в данной области техники.
[0040] Кроме того, раскрытые варианты осуществления комбинированной системы 10 активной ручки и бустерного привода управления особенно привлекательны для управления системами автопилота или при работе летательного аппарата в режиме беспилотного летательного аппарата (БПЛА). Как видно из ФИГ. 1, автопилот 110 может включать в себя автономную курсовертикаль или может полагаться на существующие датчики в летательных аппаратах, как известно в данной области техники. Автопилот 110, когда он включен, выдает в систему 30 управления полетом входной сигнал 112 управления, который заменяет сигнал 32 усилия на ручке в сервоконтуре 31. Не требуется никаких дополнительных приводов или датчиков, и комбинированная система 10 активной ручки и бустерного привода управления будет выдавать входной сигнал на поверхность 16 управления без изменений в отношении источника входного сигнала, входного сигнала 112 управления от автопилота или сигнала 32 усилия на ручке. Прикладываемое пилотом усилие на ручке для пересиливания приоритета автоматики, предаваемое сигналом 32 усилия на ручке, может обеспечиваться в качестве режима защиты от отказов до тех пор, пока автопилот не будет отключен автоматически или по выбору пилота.
[0041] Схожим образом, входной сигнал управления для поверхности 16 управления может быть обеспечен контроллером 114 БПЛА, который выдает входной сигнал 116 управления в режиме БПЛА. Контроллер БПЛА может быть беспроводным образом соединен со станцией дистанционного управления или может работать автономно, как известно в данной области техники. Летательный аппарат также может управляться по выбору в пилотируемом режиме, в котором пилот управляет ручкой 20 для выдачи сигнала 32 усилия на ручке. Эта конструкция также обеспечивает используемую по необходимости возможность пилотируемого управления летательным аппаратом (человеком и без человека) с минимальными изменениями в системе 30 управления полетом. Приоритизация входных сигналов может быть выполнена переключателем 63 выбора режима.
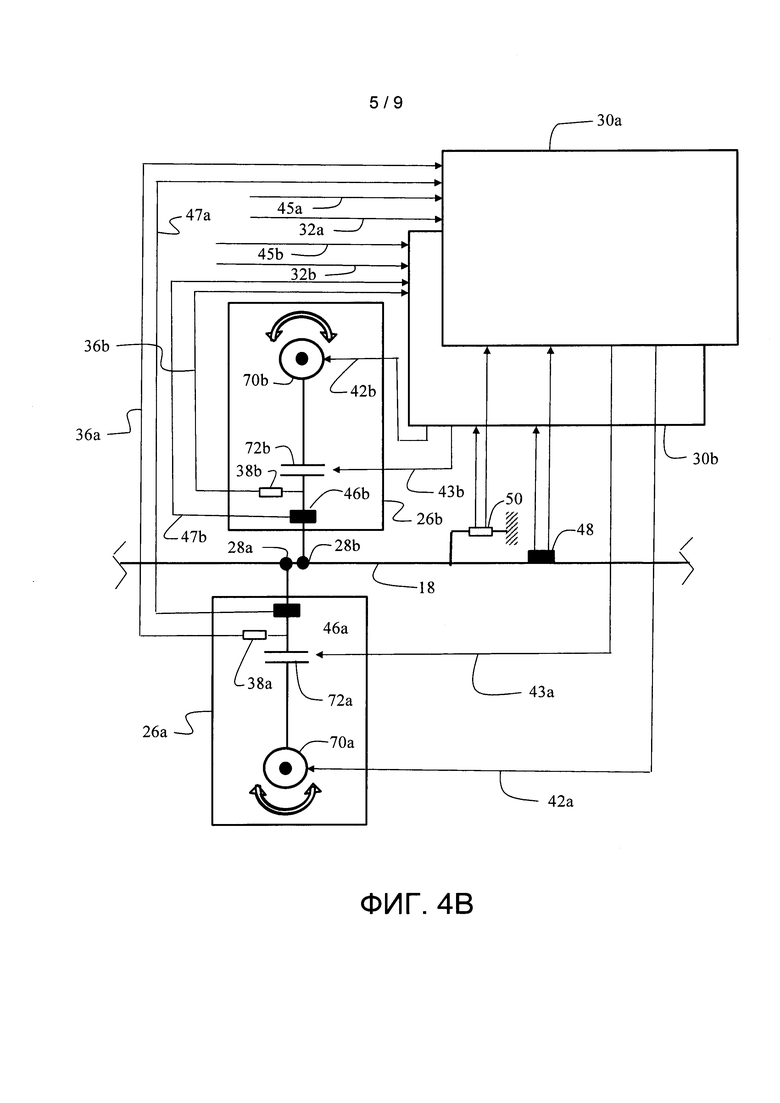
[0042] Для увеличения надежности системы и сведения к минимуму вызывающих отказы нестационарных переходных процессов в комбинированной системе 10 активной ручки и бустерного привода управления, во встроенном приводе 26 и других элементах системы, включая систему 30 управления полетом, может быть обеспечена избыточность. Как видно из ФИГ. 4В, для электромеханической системы, как описано в отношении ФИГ. 4А, могут быть использованы сдвоенные системы 30а и 30b управления полетом. Сигналы 42а и 42b управления положением привода для электродвигателей 70а и 70b встроенных приводов 26а и 26b являются управляемым токовым входом, обеспечивающим двунаправленное вращение электродвигателей. Может быть обеспечено дублирование датчиков усилия на ручке для выдачи сигналов 32а и 32b усилия на ручке в системы 30а и 30b управления полетом, соответственно. Схожим образом, может быть обеспечено дублирование датчиков положения ручки с выдачей избыточных сигналов 45а и 45b положения ручки в системы 30а и 30b управления полетом. Сигналы 43а и 43b отсоединения, вырабатываемые системами 30а и 30b управления полетом в ответ на обнаружение неисправности или заклинивания, как описано ранее, вызывают отключение муфт 72а и 72b с выборочным физическим отсоединением одного или обоих встроенных приводов 26а и 26b от устройств 28а и 28b обеспечения взаимодействия при определении состояния неисправности или заклинивания в связанном с ними электродвигателе с обеспечением таким образом для двигателя, который остается подключенным, возможности продолжения работы в системе. Хотя в примерном варианте осуществления по ФИГ. 4В механические соединители 28а и 28b показаны как избыточные, один механический соединитель 28 может быть использован с обоими встроенными приводами 26а и 26b, совместно подсоединенными и встроенными в один узел встроенного привода с помощью одной муфты. Если заклинило оба встроенных привода, отсоединение обоих двигателей позволяет механической конструкции 12 управления полетом работать в безбустерном режиме и без восприятия усилия с непосредственным вводом от ручки 20 управления через устройство 18 механической связи, как описано ранее. В режиме автопилота избыточные приводы также могут обеспечивать работу системы улучшения устойчивости.
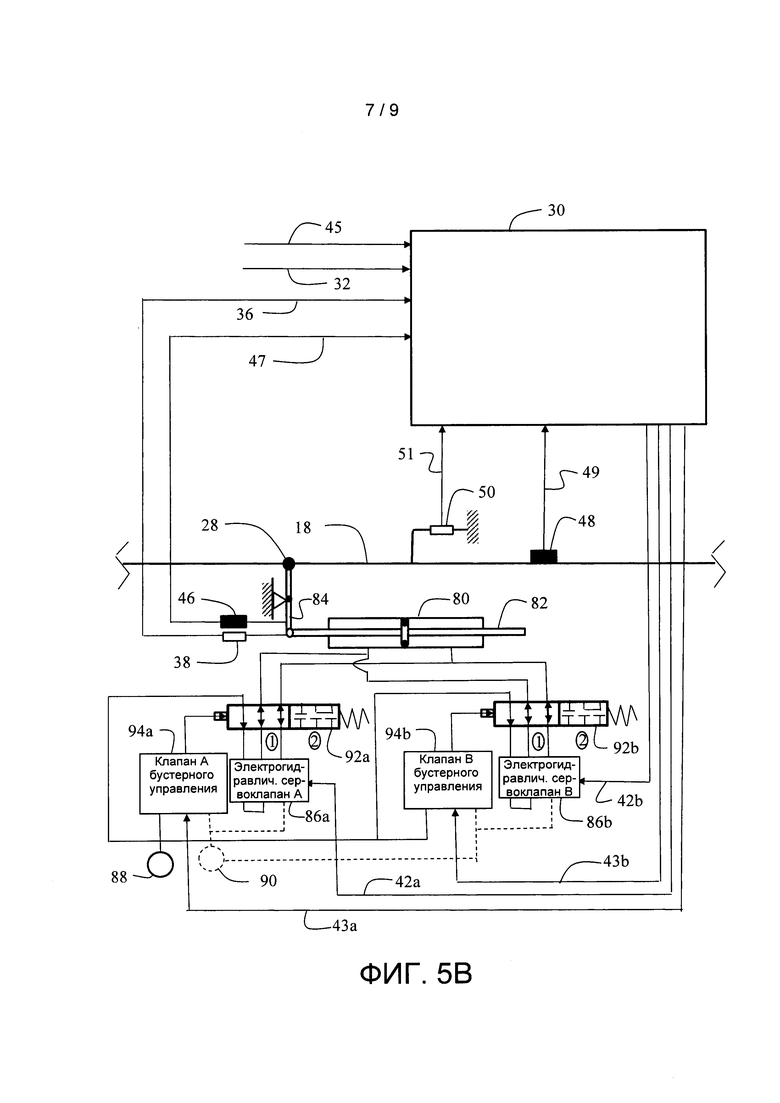
[0043] Схожим образом, избыточность в гидравлическом варианте осуществления комбинированной системы 10 активной ручки и бустерного привода управления также может быть желательной, чтобы свести к минимуму вызывающие отказы нестационарные переходные процессы и обеспечить надежность функционирования в режиме автопилота и беспилотного полета. Доступны несколько подходов, как показано на ФИГ. 5В и 5С. Вариант осуществления, показанный на ФИГ. 5В, является частично избыточным с использованием одного источника 88 и 90 гидравлической энергии и одного гидроцилиндра 80 и поршня 84. Однако управление с избыточными приводами может быть обеспечено избыточными электрогидравлическими сервоклапанами 86а и 86b. В некоторых вариантах осуществления избыточность системы 30 управления полетом и датчиков положения и усилий также может быть предпочтительной для обеспечения полного независимого управления. Сдвоенные клапаны 94а и 94b бустерного управления используются для подключения/отключения каждого канала путем смещения перепускных клапанов 92а и 92b избыточных приводов. Эти элементы управления с избыточными приводами сводят к минимуму нестационарные переходные процессы, вызывающие отказы каналов, и обеспечивают возможность непрерывной работы на канале, остающемся исправным. Функция гидравлических отсоединения или перепуска может быть проще реализована и с меньшими требованиями по весу, чем для муфты с электромеханическим приводом.
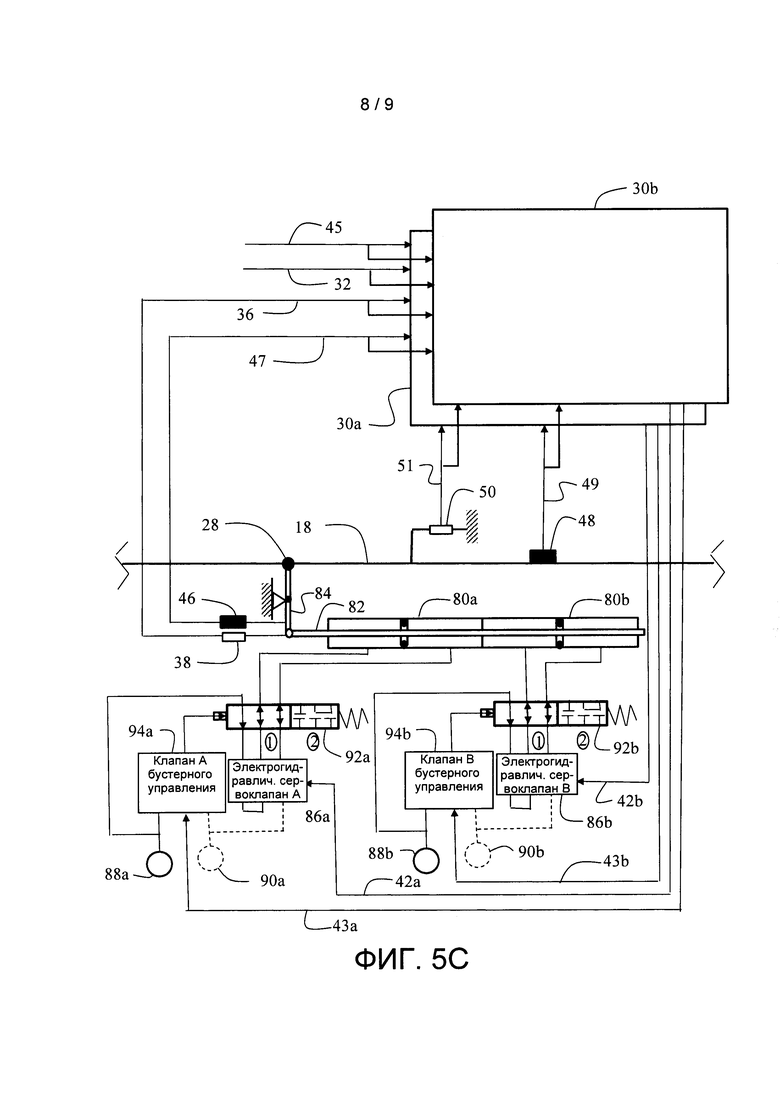
[0044] Альтернативный вариант осуществления избыточности гидравлического встроенного привода показан на ФИГ. 5С. Этот подход обеспечивает надежность функционирования в режиме автопилота и беспилотного полета, поскольку привод может работать с использованием либо канала А, либо канала В. Работа избыточных систем на основе гидравлической энергии обеспечивается элементами 88а, 88b, 90а и 90b, а управление с избыточными приводами обеспечивается избыточными электрогидравлическими сервоклапанами 86а и 86b. Избыточные клапаны 94а и 94b бустерного управления используются для подключения/отключения каждого канала, как показано на ФИГ. 5В. Отдельные гидроцилиндры 80а и 80b с соответствующими поршнями приводятся в действие электрогидравлическими сервоклапанами 86а и 86b. Избыточные цилиндры могут быть соединены последовательно, как показано (два или более каскадов усиления на линии с одним стержнем 82) или параллельно (два или более каскадов усиления, расположенных бок о бок, с отдельными стержнями, взаимодействующими с шарнирным рычагом 84).
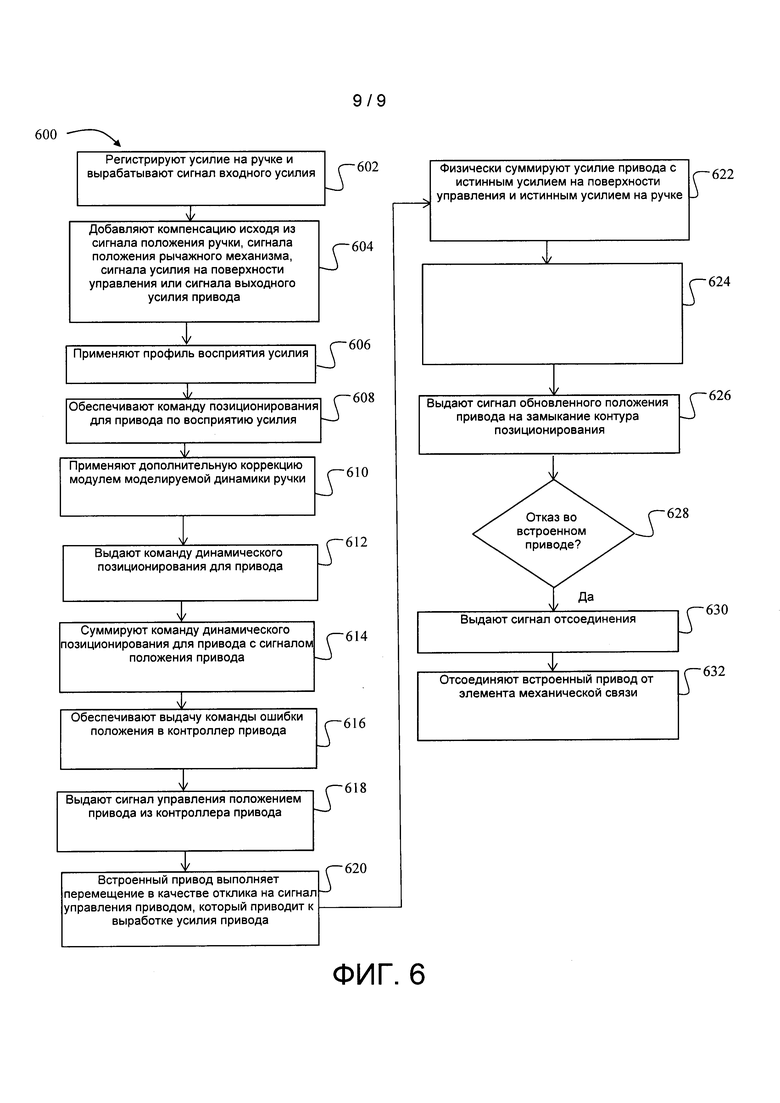
[0045] Варианты осуществления комбинированной системы 10 активной ручки и бустерного привода управления обеспечивают способ 600 управления поверхностью 16 управления, как показано на ФИГ. 6. Усилие на ручке регистрируют датчиком 34 усилия на ручке, вырабатывают сигнал 32 входного усилия, этап 602, и подают в систему 30 управления полетом. Применяют компенсацию с использованием одного или более из следующего: сигнала 45 положения ручки, сигнала 51 положения рычажного механизма, сигнала 49 усилия на поверхности управления или сигнала 47 выходного усилия привода, - посредством модуля 57 компенсации, этап 604. Применяют профиль 52 восприятия усилия, этап 606, и обеспечивают команду 58 позиционирования для привода по восприятию усилия, этап 608. Модуль 60 моделируемой динамики ручки может применять дополнительную коррекцию, этап 610, и выдавать команду 64 динамического позиционирования для привода, этап 612, которую затем суммируют с сигналом 36 положения привода, этап 614, для обеспечения выдачи команды 64 ошибки положения в контроллер 40 привода, этап 616. После этого контроллер 40 привода выдает сигнал 42 управления положением привода, этап 618. Встроенный привод 26 выполняет перемещение в ответ на сигнал управления положением привода, этап 620, с обеспечением выдачи выходного усилия или крутящего момента на устройство 18 механической связи. Это выходное усилие или этот выходной крутящий момент физически суммируют с истинным усилием 54 на поверхности управления и истинным усилием 55 на ручке, имеющихся в механической конструкции 12 управления полетом, этап 622, что приводит к физическому воздействию силы, вызывающей ускорение, на массу системы с соответствующей скоростью и изменениями положения, этап 624, для позиционирования поверхности 16 управления. Затем датчик 38 положения привода выдает сигнал 36 обновленного положения привода, этап 626, на замыкание контура 33 позиционирования. При обнаружении отказа во встроенном приводе 26, этап 628, система 30 управления полетом выдает сигнал 43 отсоединения, этап 630, для отсоединения встроенного привода от устройства 18 механической связи, этап 632.
[0046] После подробного описания различных вариантов осуществления, как того требует патентное законодательство, специалистам в данной области техники будут очевидны модификации и замены для конкретных вариантов осуществления, раскрытых в настоящем документе. Такие модификации находятся в пределах объема и целей настоящего изобретения, как определено в следующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2019 |
|
RU2714958C1 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ В СИСТЕМАХ ВОЗДУШНОГО ДВИЖЕНИЯ | 2018 |
|
RU2762151C2 |
| СИСТЕМА АВТОМАТИЗАЦИИ РАБОТЫ ЛЕТНОГО ЭКИПАЖА | 2017 |
|
RU2732646C2 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| ИНЦЕПТОР КОМПЛЕКСНОГО ДИНАМИЧЕСКОГО УПРАВЛЕНИЯ ВОЗДУШНЫМ И НАЗЕМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2593185C1 |
| СИСТЕМА И СПОСОБЫ УПРАВЛЕНИЯ С ПОМОЩЬЮ АВТОПИЛОТА | 2013 |
|
RU2623792C2 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРЕДОТВРАЩЕНИЯ ВЫХОДА УГЛА ТАНГАЖА САМОЛЕТА ЗА ПРЕДЕЛЫ ЭКСПЛУАТАЦИОННОГО ДИАПАЗОНА | 2011 |
|
RU2490168C1 |
| АВТОПИЛОТ | 2013 |
|
RU2619675C2 |
| УСТАНОВКА РУЛЕВОГО ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НА ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2016 |
|
RU2636195C2 |
Группа изобретений относится к комбинированной системе активной ручки и бустерного привода управления для поверхности летательного аппарата и способу управления поверхностью управления. Система содержит ручку управления, устройство механической связи, встроенный привод, датчик усилия на ручке, систему управления полетом, датчик положения привода. Для управления поверхностью производят регистрацию усилия на ручке датчиком усилия, вырабатывают сигнал входного усилия от датчика усилия, применяют профиль восприятия усилия в ответ на сигнал входного усилия, обеспечивают выдачу команды позиционирования для привода по восприятию усилия, суммируют сигнал положения привода с командой позиционирования для обеспечения выдачи команды ошибки по положению в контроллер привода, выдают сигнал управления положением привода из контроллера привода, перемещают встроенный привод, соединенный с устройством механической связи между соединением ручки и поверхностью управления, позиционируют поверхность управления с помощью механической конструкции управления полетом в ответ на выходное усилие или выходной крутящий момент, обеспечивают выдачу сигнала обновленного положения привода от датчика положения привода для замыкания контура позиционирования. Обеспечивается повышение эффективности управления для поверхности летательного аппарата. 2 н. и 17 з.п. ф-лы, 9 ил.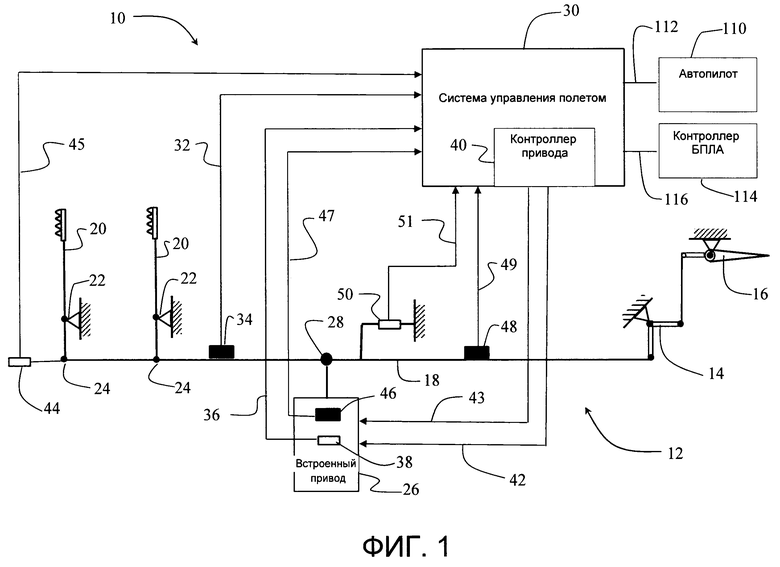
1. Комбинированная система (10) активной ручки и бустерного привода управления для поверхности (16) управления, содержащая:
ручку (20) управления, взаимодействующую с механической конструкцией (12) управления полетом, имеющей рычажный механизм (14), выполненный с возможностью перемещения поверхности (16) управления;
устройство (18) механической связи, соединенное с рычажным механизмом (14) и имеющее соединение ручки управления, вследствие чего движение ручки (20) управления вызывает поступательное перемещение устройства (18) механической связи;
встроенный привод (26), соединенный с возможностью отсоединения с устройством (18) механической связи между соединением ручки управления и рычажным механизмом (14);
датчик (34) усилия на ручке, выполненный с возможностью обеспечения выдачи сигнала (32) входного усилия в ответ на усилие, оказываемое на ручку (20) управления;
систему (30) управления полетом, выполненную с возможностью приема сигнала (32) входного усилия и с возможностью обеспечения выдачи сигнала (42) управления положением привода на встроенный привод (26) с перемещением встроенного привода (26) в предписанное положение в соответствии с профилем (52) восприятия усилия, при этом система (30) управления полетом также выполнена с возможностью обеспечения выдачи сигнала (43) отсоединения на встроенный привод (26), а встроенный привод (26) выполнен с возможностью отсоединения от устройства (18) механической связи в ответ на сигнал (43) отсоединения; и
датчик (38) положения привода, обеспечивающий выдачу сигнала (36) положения привода в указанную систему (30) управления полетом,
причем система (30) управления полетом также выполнена с возможностью замыкания контура (33) позиционирования в ответ на сигнал (36) положения привода.
2. Комбинированная система (10) активной ручки и бустерного привода управления по п. 1, в которой встроенный привод (26) содержит электродвигатель (70),
причем система (30) управления полетом включает в себя контроллер (40) привода для обеспечения выдачи сигнала (42) управления положением привода,
при этом сигнал (42) управления положением привода содержит ток двигателя.
3. Комбинированная система (10) активной ручки и бустерного привода управления по п. 2, в которой встроенный привод (26) соединен с устройством (18) механической связи механическим соединителем (28),
при этом встроенный привод (26) также содержит муфту (72) между указанным двигателем (70) и механическим соединителем (28),
причем муфта (72) выполнена с возможностью отсоединения указанного двигателя (70) от механического соединителя (28) в ответ на сигнал (43) отсоединения.
4. Комбинированная система (10) активной ручки и бустерного привода управления по п. 3, в которой система (30) управления полетом также выполнена с возможностью выдачи сигнала (43) отсоединения в ответ на определение заклинивания.
5. Комбинированная система (10) активной ручки и бустерного привода управления по п. 4, в которой превышение порогового значения сигнала (32) входного усилия приводит к определению заклинивания.
6. Комбинированная система (10) активной ручки и бустерного привода управления по п. 4, также содержащая датчик (46) усилия привода и датчик (48) усилия на поверхности управления,
причем сравнение выходного усилия встроенного привода (26), как определено датчиком (46) усилия привода и обеспечено в качестве сигнала (47) усилия привода, превышающего сумму сигнала (32) входного усилия и усилия (54) на поверхности управления, как определено датчиком (48) усилия на поверхности управления и обеспечено в качестве сигнала (49) усилия на поверхности управления, приводит к определению заклинивания.
7. Комбинированная система (10) активной ручки и бустерного привода управления по п. 4, также содержащая датчик (48) усилия на поверхности управления, обеспечивающий выдачу сигнала (49) усилия на поверхности управления,
при этом выходной ток двигателя, как обозначено сигналом (42) управления положением привода, превышающий сигнал (49) максимального ожидаемого усилия на поверхность управления плюс сигнал (32) максимального ожидаемого входного усилия, приводит к определению заклинивания.
8. Комбинированная система (10) активной ручки и бустерного привода управления по п. 3, также содержащая второй встроенный привод (26b), имеющий второй двигатель (70b) и соединенный с устройством (18) механической связи с помощью второго механического соединителя (28b), и
причем второй встроенный привод (26b) также содержит вторую муфту (72b) между вторым двигателем (70b) и вторым механическим соединителем (28b),
при этом вторая муфта (72b) выполнена с возможностью отсоединения двигателя (70) от второго механического соединителя (28b) в ответ на сигнал (43) отсоединения.
9. Комбинированная система (10) активной ручки и бустерного привода управления по п. 1, в которой встроенный привод (26) содержит:
по меньшей мере один гидроцилиндр (80), имеющий приводной стержень (82), прикрепленный к механическому соединителю (28), соединенному с устройством (18) механической связи; и
электрогидравлический сервоклапан (86), выполненный с возможностью приема сигнала (42) управления положением привода и с возможностью управления давлением от гидравлического насоса (88) через запорно-перепускной клапан (92), соединенный с указанным по меньшей мере одним гидроцилиндром (80).
10. Комбинированная система (10) активной ручки и бустерного привода управления по п. 9, в которой встроенный привод (26) также содержит клапан (94) бустерного управления и запорно-перепускной клапан (92),
причем клапан (94) бустерного управления выполнен с возможностью приема сигнала (43) отсоединения на ослабление давления от запорно-перепускного клапана (92), включающего переход из положения нормальной работы в положение запирания-перепуска с обеспечением таким образом возможности свободного поступательного перемещения приводного стержня (82) в указанном по меньшей мере одном гидроцилиндре (80).
11. Комбинированная система (10) активной ручки и бустерного привода управления по п. 10, также содержащая второй клапан (94b) бустерного управления и второй запорно-перепускной клапан (92b),
причем второй клапан (94b) бустерного управления выполнен с возможностью приема второго сигнала (43b) отсоединения и с возможностью ослабления давления от второго запорно-перепускного клапана (92b), включающего переход из положения нормальной работы в положение запирания-перепуска.
12. Комбинированная система (10) активной ручки и бустерного привода управления по п. 10, в которой указанный по меньшей мере один гидроцилиндр (80) содержит:
первый гидроцилиндр (80а) и второй гидроцилиндр (80b), причем электрогидравлический сервоклапан (86а) выполнен с возможностью приема первого сигнала (42) управления положением привода и с возможностью управления давлением от первого гидравлического насоса (88а) через запорно-перепускной клапан (92а), соединенный с первым гидроцилиндром (80а),
второй электрогидравлический сервоклапан (86b), выполненный с возможностью приема второго сигнала (42) управления положением привода и с возможностью управления давлением от второго гидравлического насоса (88b) через второй перепускной клапан, соединенный со вторым гидроцилиндром (80b),
второй клапан (94b) бустерного управления и второй запорно-перепускной клапан (92b), при этом второй клапан (94b) бустерного управления выполнен с возможностью приема второго сигнала (43b) отсоединения и с возможностью ослабления давления от второго запорно-перепускного клапана (92b), включающего переход из положения нормальной работы в положение запирания-перепуска.
13. Комбинированная система (10) активной ручки и бустерного привода управления по п. 1, также содержащая автопилот, соединенный для выдачи входного сигнала управления от автопилота в систему (30) управления полетом,
причем система (30) управления полетом также выполнена с возможностью обеспечения выдачи сигнала (42) управления положением привода на встроенный привод (26) в ответ на входной сигнал управления от автопилота с перемещением встроенного привода (26) в предписанное положение.
14. Комбинированная система (10) активной ручки и бустерного привода управления по п. 1, также содержащая контроллер беспилотного летательного аппарата (БПЛА), соединенный для обеспечения выдачи входного сигнала управления БПЛА в систему (30) управления полетом,
причем система (30) управления полетом также выполнена с возможностью обеспечения выдачи сигнала управления положением привода на встроенный привод (26) в ответ на входной сигнал управления БПЛА с перемещением встроенного привода (26) в предписанное положение.
15. Способ управления поверхностью (16) управления, включающий:
регистрацию усилия на ручке, приложенного к соединению ручки на устройстве (18) механической связи, датчиком (34) усилия на ручке;
выработку сигнала (32) входного усилия от датчика (34) усилия на ручке;
применение профиля (52) восприятия усилия в ответ на сигнал (32) входного усилия;
обеспечение выдачи команды позиционирования для привода по восприятию усилия;
суммирование сигнала (36) положения привода с командой позиционирования для привода по восприятию усилия для обеспечения выдачи команды ошибки по положению в контроллер (40) привода;
выдачу сигнала (42) управления положением привода из контроллера (40) привода;
перемещение встроенного привода (26), соединенного с устройством (18) механической связи между соединением ручки и поверхностью (16) управления, в ответ на сигнал (42) управления положением привода, при этом встроенный привод (26) выполнен с возможностью обеспечения выдачи выходного усилия или крутящего момента на устройство (18) механической связи;
позиционирование поверхности (16) управления с помощью механической конструкции (12) управления полетом в ответ на выходное усилие или выходной крутящий момент;
обеспечение выдачи сигнала (36) обновленного положения привода от датчика (38) положения привода для замыкания контура (33) позиционирования.
16. Способ по п. 15, также включающий применение компенсации к сигналу (32) входного усилия с использованием одного или более из следующего: сигнала положения ручки, сигнала положения рычажного механизма, сигнала (49) усилия на поверхности управления или сигнала выходного усилия привода, посредством модуля компенсации.
17. Способ по п. 16, также включающий применение коррекций через модуль моделируемой динамики ручки и выдачу команды динамического позиционирования для привода перед суммированием.
18. Способ по п. 15, также включающий физическое суммирование выходного усилия или крутящего момента с истинным усилием (54) на поверхности управления и истинным усилием на ручке, имеющихся в механической конструкции (12) управления полетом, перед выдачей сигнала (42) управления положением привода.
19. Способ по п. 15, также включающий:
обнаружение отказа во встроенном приводе (26);
выдачу сигнала (43) отсоединения и
отсоединение встроенного привода (26) от устройства (18) механической связи.
| Вагон с двухскатным днищем | 1930 |
|
SU30705A1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| US 9381998 B2, 05.07.2016 | |||
| US 7108232 B2, 19.09.2006 | |||
| ВЫХОДНОЙ КАСКАД ОПЕРАЦИОННОГО УСИЛИТЕЛЯ | 2006 |
|
RU2311729C1 |

