Настоящее изобретение относится к технике управления полетом летательных аппаратов. Изобретение относится к системе адаптивного управления полетом для летательного аппарата, и к летательному аппарату, оснащенному такой системой адаптивного управления полетом.
В частности, настоящее изобретение предназначено для гибридного вертолета и относится к системе адаптивного управления полетом для управления шагом лопастей толкающих винтов этого гибридного вертолета.
Под термином "гибридный вертолет" следует понимать летательный аппарат, который сочетает в себе эффективность вертикального полета обычного винтокрылого летательного аппарата и возможности большой скорости перемещения, получаемые от использования толкающих винтов.
Обычный винтокрылый летательный аппарат содержит фюзеляж и, по меньшей мере, главный несущий винт, приводимый во вращение двигателем летательного аппарата, и обеспечивающий одновременно подъемную силу и движение вперед в случае такого винтокрылого летательного аппарата, каким является вертолет. Такой летательный аппарат содержит в общем случае устройство парирования момента, которое противостоит вращающему моменту несущего винта, обусловленному реакцией главного несущего винта летательного аппарата на крутящий момент двигателя, используемого для приведения во вращение этого главного несущего винта. Этот вращающий момент несущего винта действительно приводит к тенденции поворота фюзеляжа летательного аппарата при рыскании в противоположном направлении относительно главного несущего винта. Устройство парирования момента позволяет также управлять летательным аппаратом вокруг его оси рыскания, которая по существу параллельна оси вращения главного несущего винта.
Устройство парирования момента часто образуется вспомогательным несущим винтом, расположенным обычно в задней части летательного аппарата, в конце хвостовой балки летательного аппарата, и приводится во вращение двигателем летательного аппарата посредством вспомогательной силовой механической приводной цепи.
Гибридный вертолет содержит фюзеляж и главный несущий винт, приводимый во вращение двигателем гибридного вертолета. Кроме того, гибридный вертолет снабжен крылом, составленным из двух полукрыльев и из двух толкающих винтов, помещенных с одной и с другой стороны фюзеляжа, например, на полукрыльях. Толкающие винты приводятся во вращение двигателем гибридного вертолета.
Главный несущий винт предназначен для обеспечения подъемной силы гибридного вертолета во всех случаях - и при взлете, и при посадке и при вертикальном полете, а также обычно частично и во время крейсерского полета, а крыло при этом частично способствует подъемной силе гибридного вертолета. Таким образом, главный несущий винт реализует часть аэродинамической подъемной силы гибридного вертолета при крейсерском полете, с попутным слабым вкладом в движущие силы, или силу тяги, и всегда с минимальным лобовым сопротивлением.
Движение вперед гибридного вертолета при крейсерском полете обеспечивается тогда, главным образом, толкающими винтами. Действительно, изменяя совместно, и на одну и ту же величину, шаг лопастей толкающих винтов гибридного вертолета, оказывается возможным контролировать тягу, создаваемую этими толкающими винтами и, следовательно, скорость его поступательного движения.
Следует отметить, что шаг лопастей толкающего винта может изменяться только совместно, в противоположность лопастям главного несущего винта винтокрылого летательного аппарата, шаг которого изменяется и совместно, и циклически. Соответственно, а также с целью упрощения, термин "шаг" используется в описании для обозначения "совместного шага" лопастей толкающего винта.
Кроме того, функции парирования момента и контроля угла рыскания гибридного вертолета реализуются посредством использования дифференциальной тяги, осуществляемой обычно двумя толкающими винтами, например, при использовании пилотом педального управления.
С этой целью шаги лопастей двух толкающих винтов отклоняются от своего среднего шага, причем шаг лопастей одного винта увеличивается на дифференциальный шаг, тогда как шаг лопастей другого винта уменьшается на тот же дифференциальный шаг. Шаг винта, таким образом, равен сумме среднего шага и дифференциального шага, тогда как шаг другого винта равен разности среднего шага и дифференциального шага. Иначе говоря, дифференциальный шаг равен полуразности шага винта, т.е. меньше шага другого винта, например.
Среди команд полета винтокрылого летательного аппарата, ручка управления циклического шага позволяет пилоту изменять циклический шаг лопастей главного несущего винта для управления летательным аппаратом по тангажу и по углу крена. Рычаг управления совместного шага позволяет пилоту изменять совместный шаг лопастей этого главного несущего винта для управления летательным аппаратом при подъеме. Педальное управление позволяет пилоту воздействовать на устройство парирования момента для управления летательным аппаратом при рыскании. Если это устройство парирования момента представляет собой вспомогательный несущий винт, педальное управление позволяет изменять совместный шаг лопастей этого вспомогательного несущего винта. В случае гибридного вертолета, это педальное управление позволяет изменять дифференциальным образом шаг лопастей каждого из двух толкающих винтов.
Кроме того, гибридный вертолет содержит обычно дополнительное управление полетом, составленное рычагом управления тяги толкающих винтов. Это рычаг управления тяги позволяет пилоту идентично изменять шаг лопастей обоих толкающих винтов для изменения скорости движения гибридного вертолета.
Наряду с этим, рычаги системы управления полетом обычно связаны с различными лопастями через механические связи, называемые "проводками управления" или "механическими кинематическими цепями" и, возможно, через сервоприводы, особенно на летательных аппаратах больших размеров, для которых усилия для управления оказываются более существенными.
Каждая механическая кинематическая цепь использует некоторую степень редукции передачи, называемую также "передаточным числом", между управляющей командой пилота для системы управления полетом и соответствующими изменениями шага лопастей. Это передаточное число может различаться для каждой системы управления полетом, но оно обычно постоянно для каждой системы управления полетом обычного винтокрылого летательного аппарата.
Вместе с тем может быть полезным, чтобы это передаточное число изменялось для некоторых систем управления полетом, и при управлении полетом при рыскании, в частности, в случае гибридного вертолета, в зависимости от условий полета летательного аппарата.
Известно, например, что, когда летательный аппарат имеет значительную скорость поступательного движения, использование педального управления на больших амплитудах управления может привести к маневрированию, создающему значительные механические напряжения на летательном аппарате и/или даже к опасному отклонению от курса летательного аппарата относительно его оси рыскания. Этот риск, хорошо известный для самолетов, также реален и для гибридных вертолетов, скорость поступательного движения которых при крейсерском полете существенно выше по сравнению с обычными винтокрылыми летательными аппаратами.
Для снижения этого риска, механическая кинематическая цепь системы управления полетом при рыскании, соответствующая педальному управлению, может включать в себя переключатель. Переключатель - это механическое устройство, где, например, накладываются друг на друга управляющая команда, исходящая от системы управления полетом, и значение параметра полета, или две команды, исходящие от двух различных систем управления полетом.
Переключатель предназначен, например, для изменения амплитуды управления полетом в соответствии со скоростью поступательного движения летательного аппарата, как это описано в Патенте FR 2476013. Такой переключатель позволяет, таким образом, значительно перемещать механизм маневрирования самолета, такой как руль высоты, или руль направления, при малой скорости поступательного движения, и редуцировать амплитуду этого перемещения при значительной скорости поступательного движения. Этот переключатель содержит тогда механизм регулировки, который перемещается в зависимости от сигнала, производимого динамическим давлением воздуха на летательный аппарат, и ограничивает более или менее перемещение шатуна механической кинематической цепи системы управления полетом. Передаточное число механической кинематической цепи этой системы управления полетом фиксировано.
Переключатель также может изменять передаточное число, используемое механической кинематической цепью системы управления полетом в соответствии со скоростью поступательного движения летательного аппарата, как это описано в Патенте FR 1132452. Такой переключатель позволяет, таким образом, сделать так, чтобы идентичное перемещение системы управления полетом приводило бы к различным перемещениям механизма маневрирования в зависимости от скорости поступательного движения летательного аппарата. Переключатель содержит ось, принадлежащую механической кинематической цепи системы управления полетом летательного аппарата, положение которой изменяется в зависимости от скорости поступательного движения летательного аппарата. Изменение положения этой оси позволяет изменять передаточное число механической кинематической цепи.
Кроме того, известен Патент США 2940332, который описывает систему управления полетом, применяющую варьирующееся передаточное число к управляющей команде управления полетом. Изменение передаточного числа получается с помощью силового привода, деформирующего параллелограмм, образованный шатунами и установленный на механической кинематической цепи системы управления полетом. Этот привод может управляться внешней командой, связанной с условиями полета, такими как высота или скорость летательного аппарата.
И хотя эти решения интересны, они представляются мало приспособленными к весьма специфической ситуации гибридного вертолета, в частности, из-за их ограничений относительно изменяемого передаточного числа и отсутствия точности при выведении команд системы управления полетом.
Кроме того, известен Патент FR 2946316, который относится к гибридному вертолету и который описывает переключатель, изменяющий передаточное число, используемое механической кинематической цепью системы управления полетом по углу рыскания в соответствии с управляющей командой на суммарную тягу толкающих винтов. Этот переключатель содержит средство регулировки, содержащее ролики и ремень, связанный с управлением тягой толкающих винтов. Это управление тягой толкающих винтов представляет собой в полете надежный и устойчивый указатель скорости поступательного движения гибридного вертолета относительно воздуха.
Фактически, действие пилота по управлению тягой влечет за собой перемещение ремня и изменение длины плеча рычага в механической кинематической цепи системы управления полетом по рысканию, создавая изменение передаточного числа этой механической кинематической цепи системы управления полетом по углу рыскания. Кроме того, этот Патент FR 2946316 описывает также переключатель, позволяющий добавить поправку к системе управления полетом по углу рыскания в зависимости от управляющей команды для тяги толкающих винтов. Вместе с тем эти переключатели сложны в своем функционировании и в своей установке. Кроме того, этот переключатель учитывает величину управления суммарной тягой, выполняемого пилотом для варьирования только передаточного числа на цепи управления по рысканию. Переменное передаточное число не применяется, таким образом, к управлению суммарной тягой толкающих винтов. Кроме того, это средство регулировки, содержащее ролики и ремень, ограничено по диапазону изменения и эволюции передаточного числа и приводит также к потерям точности при выводе команд управления.
Кроме того, педальное управление, которое составляет систему управления полетом по углу рыскания гибридного вертолета, и рычаг тяги толкающих винтов, совместно управляют изменением шага лопастей обоих толкающих винтов.
Это изменение шага лопастей толкающих винтов обычно управляется сначала посредством первых специфических механизмов управления, связанных с педальным управлением и с рычагом управления тягой, соответственно, затем - посредством вторых двух механизмов управления, каждый второй механизм управления при этом соединен с толкающим винтом. Средство перегруппировки позволяет объединить первые механизмы управления, затем задействовать вторые механизмы управления. Изменение шага лопастей толкающих винтов становится тогда идентичным, если управляющая команда системы управления полетом дается рычагом управления тягой. Это изменение становится дифференциальным, если управляющая команда системы управления полетом дается педальным управлением.
Каждый второй механизм управления обычно механически управляет изменением шага лопастей толкающего винта, например смещением коаксиальной трубчатой направляющей приводного вала лопастей этого толкающего винта при его вращении.
Каждый второй механизм управления может также управлять гидравлическим образом этим изменением шага лопастей толкающего винта, как описано в Патенте FR 2992696. Каждый второй механизм управления управляет гидравлическим распределителем, и флюид, такой как масло, циркулирует внутри рубашки для питания гидроцилиндра, создавая изменение шага. Кроме того, эта рубашка может заключать в себе приводной вал вращения лопастей толкающего винта, который может также иметь, помимо своего вращательного движения, поступательное движение вдоль его оси вращения. Кроме того, этот приводной вал, по меньшей мере, частично находится внутри рубашки и, таким образом, по меньшей мере, частично окружен флюидом.
Наконец, предшествующий уровень техники по изобретению содержит также Патент США 2620772, который описывает устройство повышения усилий с варьирующимся уровнем для системы управления полетом.
Таким образом, настоящее изобретение имеет целью предоставить систему адаптивного управления полетом для летательного аппарата, позволяющую освободиться от упомянутых выше ограничений, служащую для простого и надежного управления механизмом полета, применяя переменное передаточное число для отслеживаемой величины этой системы управления полетом в зависимости от этой же отслеживаемой величины. Под термином "отслеживаемая величина" следует понимать информацию о текущей величине этой системы управления полетом, действительно применяемой механизмом полета.
В частности, настоящее изобретение имеет целью систему адаптивного управления полетом для управления шагом лопастей каждого толкающего винта гибридного вертолета.
В соответствии с изобретением, система адаптивного управления полетом для летательного аппарата, предназначенная для изменения отслеживаемого передаточного числа, применяемого к отслеживаемой величине этой системы управления полетом, содержит:
- средство управления, предоставляющее управляющую команду системы управления полетом посредством первого перемещения средства управления,
- механизм управления, предназначенный для управления механизмом полета летательного аппарата,
- средство управления, содержащее управляющий шатун и применяющее передаточное число управления для преобразования этой управляющей команды системы управления полетом в команду системы управления полетом и передающее эту команду системы управления полетом на средство воздействия посредством второго перемещения управляющего шатуна,
- это средство воздействия, превращает эту команду системы управления полетом в воздействие системы управления полетом и применяет это воздействие системы управления полетом к механизму управления, и
- средство возврата информации, предоставляющее отслеживаемую величину этой системы управления полетом на средство управления.
Эта система адаптивного управления полетом в соответствии с изобретением примечательна тем, что средство возврата информации применяет изменяемое отслеживаемое передаточное число к отслеживаемой величине системы управления полетом, и это отслеживаемое передаточное число является переменным в зависимости от этой отслеживаемой величины системы управления полетом.
Эта система адаптивного управления полетом предназначена именно для летательных аппаратов с несущими винтами и, в частности, к гибридным вертолетам, содержащим фюзеляж, по меньшей мере, главный несущий винт, снабженный первыми лопастями и, по меньшей мере, два толкающих винта, расположенных с одной и с другой стороны фюзеляжа. Эти толкающие винты снабжены вторыми лопастями и располагаются, например, на полукрыльях, находящихся с одной и с другой стороны фюзеляжа. Шаг вторых лопастей каждого толкающего винта является изменяемым для изменения тяги, создаваемой этим толкающим винтом.
Таким образом, система адаптивного управления полетом в соответствии с изобретением размещается между механической кинематической цепью системы управления полетом, управляющей механизмом полета, и этим механизмом полета.
Эта система адаптивного управления полетом приспособлена для управления шагом вторых лопастей каждого толкающего винта такого гибридного вертолета. Изменение этих шагов вторых лопастей этих толкающих винтов может быть управляемым, для гибридного вертолета, с одной стороны, педальным управлением, которое изменяет дифференциальным образом шаг вторых лопастей каждого из толкающих винтов, и, с другой стороны, рычагом управления тягой толкающих винтов, который изменяет идентично шаг лопастей толкающих винтов. Система адаптивного управления полетом позволяет, таким образом, для каждого толкающего винта, изменить отслеживаемое передаточное число, применяемое к отслеживаемой величине шага вторых лопастей толкающего винта в зависимости от этой отслеживаемой величины.
Система адаптивного управления полетом располагается тогда между механическими кинематическими цепями педального управления и рычага управления тягой толкающих винтов и каждым толкающим винтом этого гибридного вертолета.
Средство управления составляет часть механической кинематической цепи системы управления полетом и предоставляет управляющую команду системы управления полетом в виде первого перемещения этого средства управления. Это средство управления располагается в конце этой механической кинематической цепи системы управления полетом и составлено, например, последним элементом проводки управления. Это средство управления также может быть составлено концом управления руления, также обозначаемым "передаточным числом скольжения" или "управлением при скольжении", и содержащим один или несколько ранжированных механизмов руления.
Следует отметить, что такая механическая кинематическая цепь системы управления полетом может включать в себя передаточное число между управляющей командой, предоставляемой пилотом летательного аппарата, и управляющей командой, передаваемой средством управления. Эта передаточное число фиксировано и постоянно.
Это средство управления предпочтительно имеет удлиненную форму, такую как труба или стержень, вытянутый вдоль оси D. Первое перемещение средства управления при этом представляет собой в целом поступательное смещение, по существу параллельное этой оси D.
Для управления шагом вторых лопастей толкающих винтов такого гибридного вертолета, средство управления располагается в конце механической кинематической цепи управления шагом вторых лопастей каждого толкающего винта. Это средство управления передает совместно управляющие команды педального управления системы управления полетом и управляющие команды рычага управления тягой толкающих винтов.
Средство управления преобразует первое перемещение средства управления во второе перемещение управляющего шатуна, и это второе перемещение составляет команду системы управления полетом. Это преобразование осуществляется применением передаточного числа управления к управляющей команде системы управления полетом посредством, например, стремян с плечами рычага различных длин. Это второе перемещение управляющего шатуна равно произведению между передаточным числом управления и первым перемещением средства управления.
Средство воздействия превращает эту команду системы управления полетом в действие системы управления полетом и применяет это действие системы управления полетом к механизму управления.
Механизм управления обеспечивает управление механизмом полета летательного аппарата, к которому применяется управляющая команда системы управления полетом. Управление этого механизма полета осуществляется, например, посредством поступательного смещения или вращения этого механизма управления.
Для управления шагом вторых лопастей толкающих винтов гибридного вертолета, механизм полета изменяет шаг вторых лопастей толкающего винта. В этих рамках, механизм управления может содержать коаксиальную трубу приводного вала при вращении вторых лопастей толкающего винта, и эта труба смещается, например, параллельно оси вращения этого приводного вала для изменения шага.
Поступательное смещение этой трубы может быть управляемым механически, если механизм управления является механическим устройством. Средство воздействия представляет собой тогда механическую систему, преобразующую второе перемещение управляющего шатуна в поступательное смещение, передаваемое трубе механизма управления.
Поступательное смещение этой трубы также может быть управляемым гидравлическим образом, и механизм управления является гидравлическим устройством, управляющим этим изменением шага вторых лопастей толкающего винта, как описано в Патенте FR 2992696. Средство воздействия представляет собой тогда гидравлическую систему, снабжающую это гидравлическое устройство, и управляемую управляющим шатуном. Эта гидравлическая система представляет собой, например, гидравлический распределитель.
Наконец, средство возврата информации предоставляет на средство управления отслеживаемую величину этой системы управления полетом, соответствующую текущей величине системы управления полетом, действительно применяемой механизмом полета. Это средство возврата информации может использовать, например, трубу механизма управления для задания этой отслеживаемой величины системы управления полетом, и эта отслеживаемая величина передается затем механически посредством системы шатунов средства управления. Это средство возврата информации может быть также обозначено термином "средство отслеживания".
Средство управления учитывает, таким образом, эту отслеживаемую величину системы управления полетом для регулирования функционирования средства воздействия, управляющего механизмом полета, чтобы этот механизм полета применил управляющую команду системы управления полетом.
Средство возврата информации применяет преимущественно изменяемое отслеживаемое передаточное число к отслеживаемой величине системы управления полетом для предоставления средству управления различной информации в зависимости от этой отслеживаемой величины системы управления полетом.
С этой целью средство возврата информации содержит средство передачи и передаточный шатун. Средство передачи связано с механизмом управления и обладает, по меньшей мере, одной степенью свободы. Механизм управления передает, таким образом, по меньшей мере, одно из своих движений на средство передачи, создавая третье перемещение этого средства передачи.
Средство передачи может, например, быть жестко связано с механизмом управления, и средство передачи обладает тогда теми же возможностями движения, что и механизм управления. Действительно, считается, что два элемента жестко взаимосвязаны, когда они связаны между собой неподвижно и, таким образом, испытывают одни и те же перемещения.
Предпочтительно, средство передачи обладает единственной степенью свободы. Средство передачи обладает, например, только возможностью поступательного движения, если третье поступательное перемещение передается механизмом управления. Средство передачи также может обладать возможностью только вращательного движения, когда третье вращательное перемещение передается этим механизмом управления.
Средство передачи может быть также жестко связанным с механизмом управления, когда этот механизм управления обладает единственной возможностью движения.
Если этот механизм управления обладает, по меньшей мере, двумя возможностями движения, то средство передачи связано с механизмом управления первой механической связью. Эта первая механическая связь передает третье перемещение средству передачи, разрешая при этом относительное движение между средством передачи и механизмом управления.
Например, когда этот механизм управления обладает двумя возможностями движения, а именно, поступательного движения и вращательного движения, первая механическая связь представляет собой шарнирное соединение, когда средство передачи обладает только возможностью поступательного движения.
Средство передачи связано с передаточным шатуном второй механической связью. Третье перемещение средства передачи может тогда повлечь за собой четвертое перемещение передаточного шатуна посредством этой второй механической связи. Это четвертое перемещение передаточного шатуна может быть поступательным перемещением, но также и вращением. Средство передачи применяет тогда отслеживаемое передаточное число к отслеживаемой величине системы управления полетом, превращая третье перемещение средства передачи в четвертое перемещение передаточного шатуна.
Эта вторая механическая связь может быть образована канавкой, имеющейся на средстве передачи, и штифтом, который содержит передаточный шатун. Штифт расположен в канавке, и третье перемещение этого средства передачи может повлечь за собой движение штифта в канавке и, следовательно, четвертое перемещение передаточного шатуна.
Эта канавка может быть образована несколькими прямыми линиями с последующими различными наклонами на сборке средства передачи. В этом случае, средство возврата информации применяет преимущественно изменяемое отслеживаемое передаточное число к отслеживаемой величине системы управления полетом на сборке средства передачи. Действительно, это отслеживаемое передаточное число постоянно, пока штифт находится на одной и той же прямой линии канавки, но это отслеживаемое передаточное число изменяется, когда штифт отклоняется от прямой линии в канавке. Это отслеживаемое передаточное число пропорционально наклону канавки, в которой располагается штифт. Преимущественно то, что это отслеживаемое передаточное число изменяется в зависимости от отслеживаемой величины системы управления полетом.
Эта канавка может быть образована также изгибом на сборке средства передачи. В этом случае, отслеживаемое передаточное число изменяется непрерывно в соответствии с положением штифта в канавке.
Таким образом, перемещение штифта в канавке влечет за собой изменение отслеживаемого передаточного числа, когда штифт меняет наклон в канавке или когда штифт перемещается в изгибе канавки.
Таким образом, отслеживаемая величина системы управления полетом, снабженной средством возврата информации на средство управления, может быть сбалансирована в зависимости от этого отслеживаемого передаточного числа и, таким образом, от текущей величины управления полетом, действительно применяемой механизмом полета. Регулирование функционирования средства воздействия, управляющего механизмом полета, может быть приспособлено, таким образом, в зависимости от этого отслеживаемого передаточного числа и, следовательно, от текущей величины управления полетом, действительно применяемой механизмом полета.
Следует отметить, что, если бы эта канавка была образована единственной прямой линией, то есть в соответствии с единственным наклоном, на сборке средства передачи, то средство возврата информации применяло бы постоянное отслеживаемое передаточное число к отслеживаемой величине системы управления полетом.
Средство возврата информации предоставляет затем отслеживаемую величину системы управления полетом, к которой применено отслеживаемое передаточное число, на средство управления для обеспечения регулирования средства воздействия, управляющего механизмом полета в соответствии с управляющей командой системы управления полетом и этой отслеживаемой величиной системы управления полетом, к которой применено отслеживаемое передаточное число.
Средство управления содержит первое стремя, связанное с передаточным шатуном, и второе стремя, связанное с первым стременем, со средством управления и с управляющим шатуном. Если передаточный шатун связан с первым стременем, то четвертое перемещение передаточного шатуна влечет за собой пятое перемещение первого стремени.
Передаточный шатун может быть связанным с первым стременем третьей механической связью, которая превращает тогда четвертое перемещение передаточного шатуна в пятое перемещение первого стремени.
Предпочтительно, передаточный шатун жестко связан с первым стременем. Например, четвертое перемещение передаточного шатуна и пятое перемещение первого стремени представляют собой вращение вокруг одной и той же оси вращения.
Второе стремя связано с первым стременем первым шарнирным соединением и со средством управления вторым шарнирным соединением. Управляющий шатун может быть жестко связан с этим вторым стременем. Предпочтительно, этот управляющий шатун связан со вторым стременем третьим шарнирным соединением.
Первое перемещение средства управления, отображающее управляющую команду системы управления полетом, влечет за собой тогда вращение второго стремени вокруг первого шарнирного соединения и затем второе перемещение управляющего шатуна.
Первое плечо рычага задается первым расстоянием между первым шарнирным соединением и вторым шарнирным соединением, при том, что это первое расстояние задается перпендикулярно оси D. Второе плечо рычага задается вторым расстоянием между первым шарнирным соединением и третьим шарнирным соединением, при том, что это второе расстояние также задается перпендикулярно оси D. В случае если управляющий шатун жестко связан со вторым стременем, второе плечо рычага задается вторым расстоянием между первым шарнирным соединением и точкой скрепления управляющего шатуна со вторым стременем.
Передаточное число управления, применяемое средством управления равно тогда отношению между вторым расстоянием и первым расстоянием.
Кроме того, первое шарнирное соединение подвергается пятому перемещению первого стремени и влечет за собой тогда шестое перемещение второго стремени. Фактически, шестое перемещение второго стремени влечет за собой перемещение, дополнительное к управляющему шатуну. Это перемещение, дополнительное к управляющему шатуну, объединяется со вторым перемещением управляющего шатуна для изменения команды управления полетом и для регулирования, таким образом, функционирования средства воздействия, управляющего механизмом полета. Обычно, это перемещение, дополнительное к управляющему шатуну, которое является функцией отслеживаемой величины системы управления полетом, к которой применяется отслеживаемое передаточное число, противоположно второму перемещению управляющего шатуна, когда механизм полета приближается к применению управляющей команды системы управления полетом.
Кроме того, пятое перемещение первого стремени и шестое перемещение второго стремени создают изменение первого и второго расстояний, при этом ось D по существу остается неизменной. В результате, передаточное число управления, применяемое средством управления к управляющей команде системы управления полетом, изменяется. Это изменение передаточного числа управления осуществляется, таким образом, в зависимости от величины пятого перемещения первого стремени, которое является функцией отслеживаемой величины системы управления полетом, к которой применяется отслеживаемое передаточное число.
Передаточное число управления применяется к управляющей команде системы управления полетом, предоставленной средством управления, и изменяется средством возврата информации. Таким образом, это передаточное число управления преимущественно является переменным, в зависимости от отслеживаемой величины системы управления полетом, которая соответствует текущей величине системы управления полетом, действительно применяемой механизмом полета, и не в зависимости от перемещения средства управления.
Кроме того, отслеживаемое передаточное число, применяемое к этой отслеживаемой величине системы управления полетом, также является переменным в зависимости от этой отслеживаемой величины из средства возврата информации. Таким образом, эта отслеживаемая величина системы управления полетом может быть уменьшена или увеличена с целью ее передачи на средство управления.
Таким образом, перемещение управляющего шатуна, управляющего средством воздействия, задается применением, с одной стороны, передаточного числа управления к управляющей команде системы управления полетом, и, с другой стороны, отслеживаемого передаточного числа к отслеживаемой величине системы управления полетом, причем передаточное число управления и отслеживаемое передаточное число являются переменными в зависимости от этой текущей величины системы управления полетом, действительно применяемой механизмом полета.
Преимущественно то, что применение передаточного числа управления и отслеживаемого передаточного числа, так же, как и управление изменениями этих передаточных чисел, располагаются на конце механической кинематической цепи системы управления полетом, непосредственно на уровне средства воздействия и механизма управления механизма полета, в противоположность существующим устройствам, описанным, в частности, в Патентах FR 1132452 и FR 2946316. Фактически, перемещение механической кинематической цепи системы управления полетом, происходящее перед применением этих передаточных чисел и управления их изменениями, оказывается относительно важным, когда передаточное число управления обычно меньше единицы. И напротив, для существующих устройств, применение передаточных чисел и управления ими располагаются перед механизмом управления, и, более точно, на механической кинематической цепи системы управления полетом. В результате, перемещение механической кинематической цепи относительно важно в начале, и значительно менее важно в конце этого применения этих передаточных чисел и/или управления их изменениями.
Таким образом, система адаптивного управления полетом в соответствии с изобретением только незначительно возмущается, или вообще не возмущается, разбросами или неточностями, связанными с механической кинематической цепью управления полетом. Действительно, эти разбросы или неточности, которые образуются слабыми перемещениями или деформациями, имеют только незначительное воздействие на перемещения механической кинематической цепи, которые относительно важны. Эти разбросы или неточности вызваны, например, большой длиной механической кинематической цепи и растягиваниями, которым она может подвергаться.
Также, при том, что перемещения механической кинематической цепи системы управления полетом относительно важны, эта механическая кинематическая цепь оказывается мало подверженной нагрузке. Фактически, при этом ее размеры и ее масса могут быть оптимизированы.
Наконец, применение этих передаточных чисел и управление их изменениями могут создавать трения на механической кинематической цепи управления полетом, увеличивая в результате нагрузки при управлении этой механической кинематической цепью системы управления полетом. Преимущественно, применение передаточных чисел управления и отслеживания, так же как управление их изменением, располагается на уровне механизма управления механизма полета и не добавляет при этом ни какого-либо трения, ни паразитной нагрузки механической кинематической цепи системы управления полетом.
Силы трения, связанные с применением передаточных чисел управления и отслеживания, так же, как и управление их изменениями системой адаптивного управления полетом в соответствии с изобретением, появляются на уровне средства отслеживания, перемещение которого создается непосредственно механизмом полета. Этими силами трения можно тогда пренебречь в связи с возможностями этого механизма управления, который является, например, гидравлическим устройством.
Кроме того, кинематика средства управления системы адаптивного управления полетом в соответствии с изобретением гарантирует преимущественно отсутствие значительной связи средства управления с передаточным числом управления и с отслеживаемым передаточным числом. Таким образом, первое перемещение средства управления не влечет за собой никакого изменения передаточного числа управления и никакого изменения отслеживаемого передаточного числа. Фактически, передаточное число управления и отслеживаемое передаточное число, независимы и нечувствительны по отношению к любому действию средства управления, то есть любого действия на педальное управление или на рычаг тяги толкающих винтов.
Кроме того, система адаптивного управления полетом в соответствии с изобретением является полностью механической и, в случае необходимости, гидравлической системой для средства воздействия и механизма управления, что является залогом надежности. Все-таки, надежность первой, второй и третьей механических связей должна быть гарантированной, и, в частности - отсутствие риска заклинивания или блокировки для получения необходимых сертификатов для установки этой системы адаптивного управления полетом на борту летательного аппарата.
С этой целью первая механическая связь и вторая механическая связь могут быть постоянно расположенными внутри смазываемой зоны. Преимущественно, средство возврата информации, и в особенности средство передачи и передаточный шатун, частично располагаются тогда, по меньшей мере, в такой зоне и оказываются постоянно смазанными. Первая механическая связь и вторая механическая связь, таким образом, оказываются постоянно смазанными, без специальной системы смазки. Кроме того, передаточный шатун введен как жестко связанный с первым стременем для исключения третьей механической связи и сопутствующих рисков заклинивания или блокировки.
Надежность средства возврата информации гарантируется, таким образом, для получения сертификатов, необходимых для установки этой системы адаптивного управления полетом на борту летательного аппарата.
Например, средство возврата информации располагается в коробке силовой передачи толкающего винта и использует устройство смазки этой коробки передачи.
Кроме того, система адаптивного управления полетом в соответствии с изобретением, когда она используется для управления шагом вторых лопастей толкающего винта гибридного вертолета, позволяет преимущественно изменить передаточное число управления, применяемое к первой управляющей команде педального управления и ко второй управляющей команде рычага управления тягой толкающих винтов, так же, как отслеживаемое передаточное число, применяемое к отслеживаемой величине шага вторых лопастей этого толкающего винта в зависимости от этой отслеживаемой величины. Эта отслеживаемая величина, которая характеризует тягу, создаваемую толкающим винтом, является надежным и устойчивым указателем скорости поступательного движения гибридного вертолета. Система адаптивного управления полетом позволяет, таким образом, изменять передаточное число управления и отслеживаемое передаточное число в соответствии со скоростью поступательного движения гибридного вертолета, а именно изменять эти передаточные числа, когда эта скорость поступательного движения значительна.
Система адаптивного управления полетом в соответствии с изобретением позволяет тогда сократить влияние пилота на управления полетом и, в частности, влияние на педальное управление и рычаг тяги для значительных скоростей поступательного движения, минимизируя, таким образом, их действия на поведение летательного аппарата. Таким образом, одна и та же управляющая команда системы управления полетом, переданная средством управления, создает, например, изменение шага лопастей толкающего винта более существенное для малой скорости поступательного движения, чем для большой скорости. Таким образом, система адаптивного управления полетом в соответствии с изобретением позволяет получить большое влияние на управление при установившемся полете для гарантии маневренности летательного аппарата, и позволяет ограничивать влияние на управление при крейсерском полете для гарантии стабильности полета, какие бы ни были действия пилота, и предупредить, таким образом, превышение крутящего момента цепей механической передачи толкающих винтов.
С этой целью отслеживаемое передаточное число значительно увеличивается, например, когда велика скорость поступательного движения, для ограничения влияния первого перемещения средства управления на поведение летательного аппарата и, затем, влияния действий пилота на эти системы управления полета.
Преимущественно, действие пилота на педальное управление или на рычаг тяги толкающих винтов, когда гибридный вертолет выполняет эволюции с высокими скоростями, не влечет за собой быстрое изменение шага вторых лопастей каждого толкающего винта. Изменения передаточного числа управления и отслеживаемого передаточного числа, оказываются тогда теми же самыми для движений при рыскании летательного аппарата и для изменений тяги, создаваемой толкающими винтами.
Таким образом, действие на педальное управление не влечет за собой ни неконтролируемых внезапных поворотов летательного аппарата вокруг своей оси рыскания, ни повреждений аэродинамических элементов, которые он содержит.
Также, действие пилота на рычаг тяги толкающих винтов не влечет за собой повреждения этих толкающих винтов, или цепи механической передачи этих толкающих винтов.
Действительно, без этой системы адаптивного управления полетом, действие пилота на рычаг тяги толкающих винтов при высоких скоростях провоцировало бы, например, уменьшение тяги, создаваемой толкающими винтами без быстрого снижения скорости поступательного движения летательного аппарата. Кроме того, поток воздуха, создаваемый быстрым поступательным движением летательного аппарата, приводил бы к ускорению вращения вторых лопастей толкающих винтов, что приводило бы затем к ускорению цепи механической передачи этих толкающих винтов. Превышения допустимого крутящего момента могут тогда появиться на уровне цепей механической передачи этих толкающих винтов и приводить к ускоренному износу этой цепи механической передачи, и даже к резкому появлению поломок и/или механического повреждения.
В результате, полет гибридного вертолета может проходить более уверенно, без этих рисков, благодаря использованию системы адаптивного управления полетом в соответствии с изобретением.
Следует отметить, что минимальные и максимальные передаточные числа управления, так же как отслеживаемые минимальные и максимальные передаточные числа, определены посредством обычных испытаний в зависимости от характеристик летательного аппарата и из моделирования, позволяющего тестировать различные конфигурации, и специалист в данной области техники сможет оптимизировать значения и эволюции этих максимальных и минимальных передаточных чисел.
Например, изменение отслеживаемого передаточного числа составляет порядка 500% между минимальными и максимальными передаточными числами, тогда как передаточное число управления по существу постоянно. Изменение этого отслеживаемого передаточного числа - важный фактор для получения эффективной адаптации управляющей команды системы управления полетом механизма полета к текущей величине управления полетом, действительно используемой механизмом полета.
Предпочтительно, передаточное число управления по существу постоянно или меняется очень слабо, тогда как изменение отслеживаемого передаточного числа значительно.
Кроме того, наибольшее отклонение управляющего шатуна, управляющего средством воздействия, может быть ограничено наличием упоров. Эти упоры позволяют ограничить амплитуду управления, используемую средством воздействия и, затем, избежать слишком быстрого изменения управления полетом, примененного к механизму полета.
Настоящее изобретение имеет целью также систему силовой передачи толкающего винта, содержащую систему адаптивного управления полетом, описанную выше, и коробку силовой передачи толкающего винта.
Средство возврата информации предпочтительно расположено внутри коробки силовой передачи толкающего винта, чтобы средство возврата информации было постоянно смазано.
Настоящее изобретение также имеет целью летательный аппарат с несущим винтом, содержащий, по меньшей мере, механизм полета, по меньшей мере, систему управления полетом и, по меньшей мере, механическую кинематическую цепь управления полетом, управляющую механизмом полета, так же как, по меньшей мере, системой силовой передачи толкающего винта, описанной выше, и располагаемой между механической кинематической цепью управления полетом и соответствующим механизмом полета.
Этот летательный аппарат представляет собой именно гибридный вертолет, содержащий фюзеляж, по меньшей мере, главный несущий винт, снабженный первыми лопастями и, по меньшей мере, два толкающих винта, расположенные с одной и с другой стороны фюзеляжа и снабженные вторыми лопастями. Система силовой передачи толкающего винта располагается между каждой механической кинематической цепью управления шагом вторых лопастей толкающего винта и этим толкающим винтом.
Для этого гибридного вертолета, первая система управления полетом - это педальное управление для управления полетом по углу рыскания летательного аппарата, управляющее дифференциальным образом шагом вторых лопастей каждого толкающего винта, и вторая система управления полетом - это рычаг управления тягой толкающих винтов, управляющая идентично шагом вторых лопастей каждого толкающего винта. Первая и вторая системы управления полетом действуют совместным образом на средства управления системы адаптивного управления полетом каждой системы силовой передачи толкающего винта.
Изобретение и его преимущества станут яснее в рамках подробного описания с вариантами реализации, приведенными для иллюстрации и в связи с приложенными чертежами, на которых:
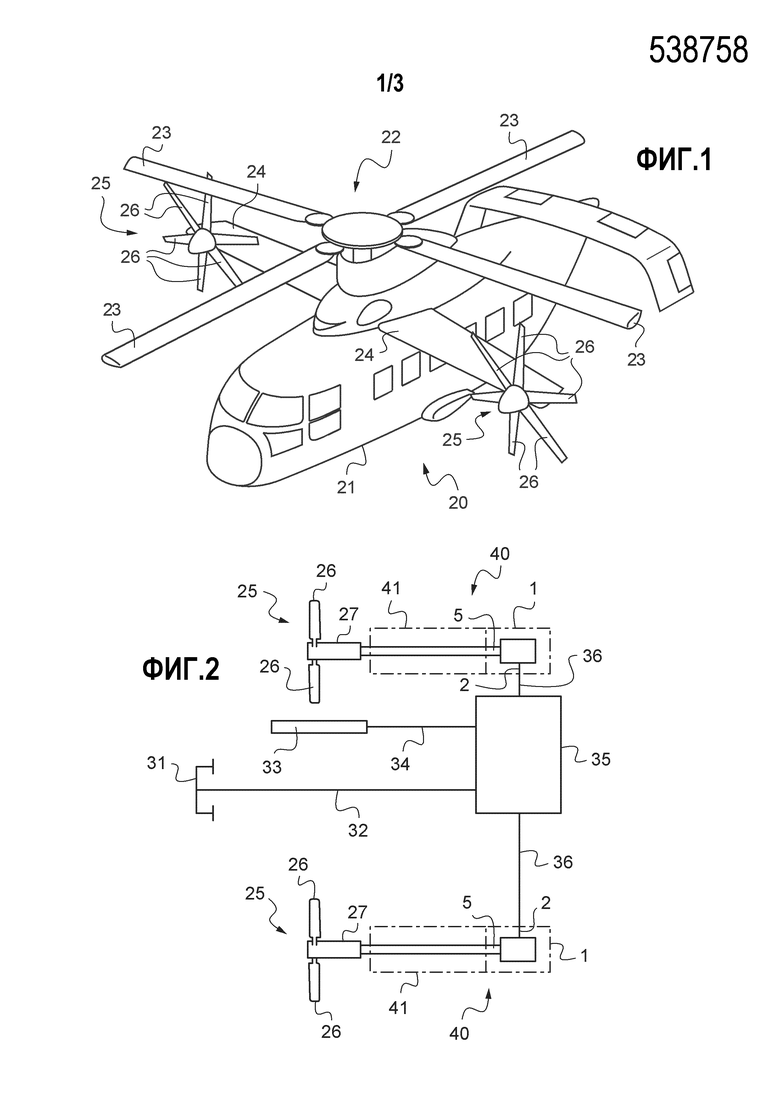
- Фиг.1 изображает гибридный вертолет,
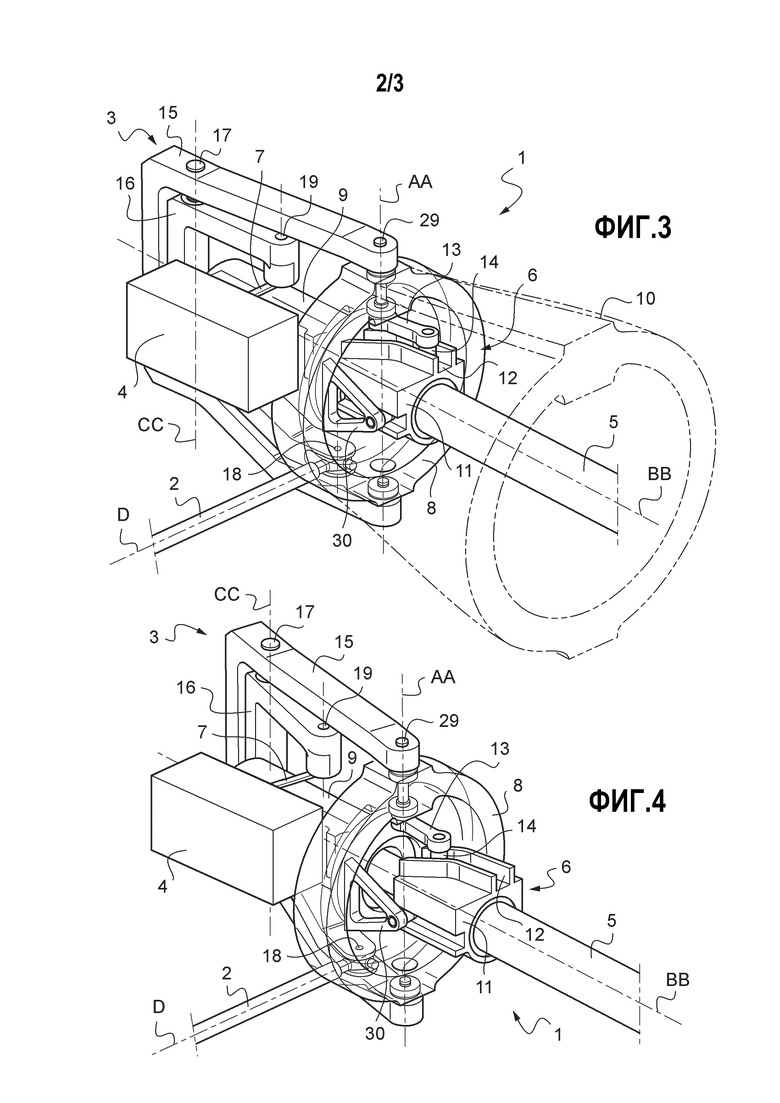
- Фиг.2 - схема структуры управления изменением шага вторых лопастей толкающих винтов,
- Фиг.3 и 4 - два перспективных вида системы адаптивного управления полетом в соответствии с изобретением,
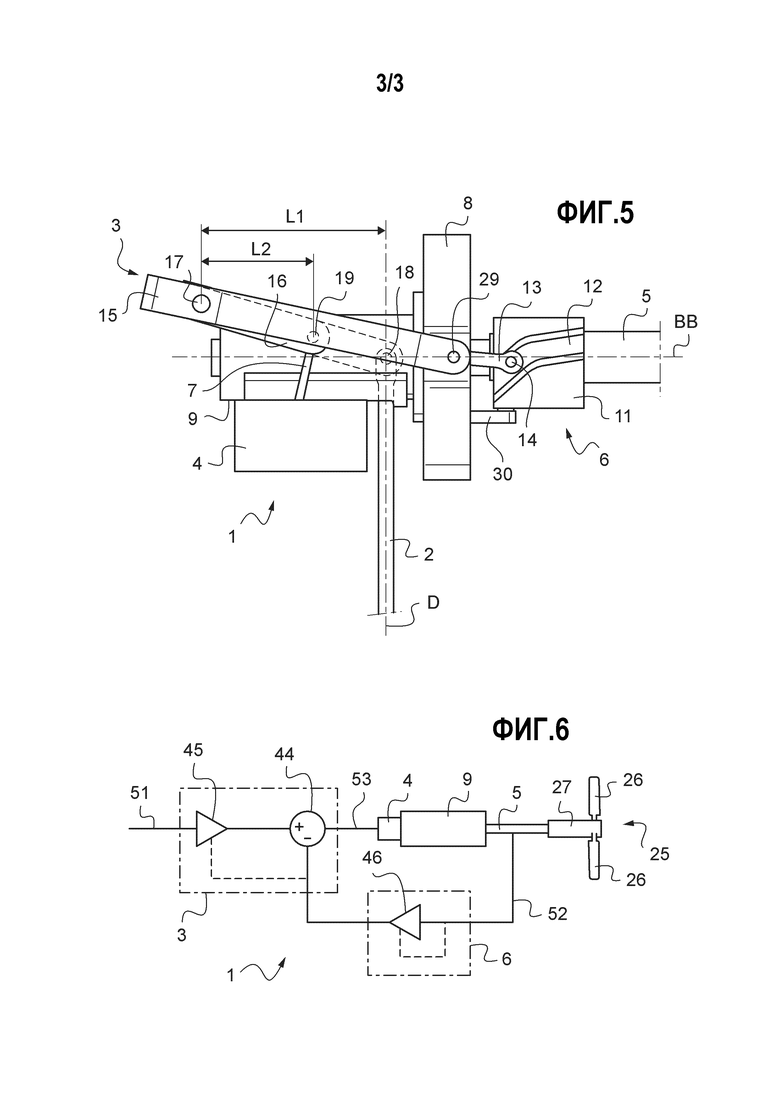
- Фиг.5 - вид снизу этой системы адаптивного управления полетом, и
- Фиг.6 - схема принципа функционирования системы адаптивного управления полетом.
Элементы, показанные на нескольких различных чертежах отмечены одинаковыми обозначениями.
На Фиг.1 показан летательный аппарат 20, а именно, гибридный вертолет, включающий в себя фюзеляж 21, главный несущий винт 22, включающий в себя первые лопасти 23, два полукрыла 24, расположенные по обе стороны фюзеляжа 21, и два толкающих винта 25, снабженных вторыми лопастями 26. Толкающий винт 25 располагается на каждом полукрыле 24.
Главный несущий винт 22 обеспечивает в целом подъемную силу гибридного вертолета 20 во время фаз взлета, посадки и вертикального полета, а также и движений вокруг его оси тангажа и вокруг продольной оси. Во время крейсерского полета, эта подъемная сила распределяется между главным несущим винтом 22 и полукрыльями 24.
Движение вперед гибридного вертолета 20 обеспечивается главным образом толкающими винтами 25, особенно в крейсерском полете, и, в случае необходимости, с вкладом главного несущего винта 22. Каждый толкающий винт 25 создает переменную тягу в соответствии с шагом их вторых лопастей 26, позволяя контролировать скорость поступательного движения гибридного вертолета 20.
Кроме того, толкающие винты 25 обеспечивают также функции парирования момента и управление по рысканию гибридного вертолета 20 посредством разности тяги этих двух толкающих винтов 25.
Гибридный вертолет 20 содержит первую систему управления полетом, которая является педальным управлением 31, позволяющим пилоту управлять движением гибридного вертолета 20 вокруг его оси рыскания, изменяя дифференциальным образом шаг вторых лопастей 26 обоих толкающих винтов 25.
Гибридный вертолет 20 содержит также вторую систему управления полетом, которая является рычагом управления тягой 33 толкающих винтов 25, позволяющим пилоту идентично изменять шаг вторых лопастей 26 двух толкающих винтов 25 для изменения скорости поступательного движения гибридного вертолета 20.
Как показано на Фиг.2, педальное управление 31 и рычаг управления тягой 33 соединены с первичной механической кинематической цепью 32,34 управления, соответственно. Две первичных механических кинематических цепи 32,34 связаны с двумя вторичными механическими кинематическими цепями 36 посредством средства перегруппировки 35 с целью совместного управления изменением шага вторых лопастей 26 каждого толкающего винта 25 посредством механизма 27 полета.
Гибридный вертолет 20 содержит две системы 1 адаптивного управления полетом, изображенные подробно на чертежах 3-5, схема принципа функционирования которых изображена на Фиг.6. Система 1 адаптивного управления полетом расположена на конце каждой из этих двух вторичных механических кинематических цепей 36, более точно - между вторичной механической кинематической цепью 36 и механизмом 27 полета толкающего винта 25.
На Фиг.3 и 4 представлены два вида в перспективе системы 1 адаптивного управления полетом для двух крайних положений использования. На Фиг.5 представлен вид снизу этой системы 1 адаптивного управления полетом для крайнего положения, показанного на Фиг.4.
Система 1 адаптивного управления полетом содержит средство 2 управления, средство 3 управления, средство 4 воздействия, механизм 5 управления, средство 6 возврата информации и круглую раму 8.
На Фиг.3 представлен корпус 10 коробки силовой передачи толкающего винта 41. Этот корпус 10 зафиксирован на круглой раме 8 системы 1 адаптивного управления полетом. Система 1 адаптивного управления полетом образует, с этой коробкой силовой передачи толкающего винта 41, систему силовой передачи толкающего винта 40. На Фиг.3, круглая рама 8 и корпус 10 представлены как прозрачные для облегчения понимания функционирования системы 1 адаптивного управления полетом. Также, на Фиг.4 круглая рама 8 представлена как прозрачная.
Средство 6 возврата информации содержит средство 11 передачи и передаточный шатун 13. Средство 3 управления содержит управляющий шатун 7, первое стремя 15, связанное с передаточным шатуном 13, и второе стремя 16, связанное с первым стременем 15, со средством 2 управления и с управляющим шатуном 7.
Средство 2 управления представляет собой трубу, вытянутую вдоль оси D и составленную концом вторичной механической кинематической цепи 36. Эта вторичная механическая кинематическая цепь 36 передает, таким образом, управляющую команду изменения шага вторых лопастей 26 посредством первого перемещения этого средства 2 управления. Это первое перемещение представляет собой поступательное перемещение, по существу параллельное оси D.
Эта управляющая команда изменения шага вторых лопастей 26 обеспечивается пилотом гибридного вертолета 20 посредством педального управления 31 или посредством рычага 33 управления тягой. Эта управляющая команда изменения шага может быть предоставлена также автопилотом, которым оснащен этот гибридный вертолет 20, и действует непосредственно на обе первичные механические кинематические цепи 32,34.
Кроме того, первое шарнирное соединение 17 связывает первое стремя 15 и второе стремя 16. Также, второе стремя 16 связано со средством 2 управления вторым шарнирным соединением 18 и с управляющим шатуном 7 третьим шарнирным соединением 19.
Первое перемещение средства 2 управления влечет за собой вращение второго стремени 16 вокруг оси CC первого шарнирного соединения 17 и провоцирует второе перемещение управляющего шатуна 7, который создает тогда команду изменения шага вторых лопастей 26. Эта команда соответствует управляющей команде изменения шага вторых лопастей 26, к которым было применено передаточное число управления средством 3 управления.
Это передаточное число управления задается геометрией средства 3 управления. Первое расстояние L1 между первым шарнирным соединением 17 и вторым шарнирным соединением 18 задает первое плечо рычага перпендикулярно оси D, как показано на Фиг.5. Аналогично, второе расстояние L2 между первым шарнирным соединением 17 и третьим шарнирным соединением 19 задает второе плечо рычага перпендикулярно оси D. Передаточное число управления равно тогда второму расстоянию L2, деленному на первое расстояние L1.
Средство 4 воздействия принимает эту команду изменения шага вторых лопастей 26 посредством второго перемещения управляющего шатуна 7. Средство 4 воздействия превращает эту команду в действие изменения шага вторых лопастей 26 и применяет это действие к механизму 5 управления.
Механизм 5 управления представляет собой коаксиальную трубу с приводным валом, приводящим во вращение вторые лопасти 26 толкающего винта 25, и обеспечивает управление механизма 27 полета поступательным смещением параллельно оси BB. Этот механизм 27 полета изменяет тогда шаг вторых лопастей 26 толкающего винта 25 в зависимости от этого смещения механизма 5 управления. Этот механизм 5 управления также может быть вовлеченным во вращение вокруг оси BB этим приводным валом.
Средство 4 воздействия превращает, таким образом, второе перемещение управляющего шатуна 7, то есть команду изменения шага вторых лопастей 26, в это смещение механизма 5 управления.
Поступательное смещение этого механизма 5 управления может быть управляемым механически средством 4 воздействия. Средство 4 воздействия тогда представляет собой механическую систему, превращающую второе перемещение управляющего шатуна 7 в поступательное смещение, передаваемое механизму 5 управления, в случае необходимости, посредством средства 9 усиления. Это средство 9 усиления позволяет обеспечить, когда это необходимо, мощность, необходимую для поступательного смещения механизма 5 управления для изменения шага вторых лопастей 26.
Поступательное смещение этого механизма 5 управления может быть управляемым также гидравлическим образом средством 4 воздействия. Средство 4 воздействия тогда представляет собой гидравлическую систему, например, гидравлический распределитель, управляемый управляющим шатуном 7 и снабжающий средство 9 усиления, которое является тогда гидроцилиндром. Этот гидроцилиндр обеспечивает тогда поступательное смещение механизма 5 управления.
Средство 11 передачи, которое содержит средство 6 возврата информации, связано с механизмом 5 управления первой механической связью, поступательное смещение механизма 5 управления создает третье перемещение средства 11 передачи. Напротив, средство 30 блокировки мешает тому, чтобы вращение механизма 5 управления было передано средству 11 передачи. Средство 30 блокировки жестко связано с круглой рамой 8, которая зафиксирована. Фактически, средство 11 передачи обладает только одной степенью свободы при смещении относительно круглой рамы 8, третье перемещение этого средства 11 передачи является поступательным смещением, параллельным оси BB. Механизм 5 управления обладает двумя степенями свободы по отношению к круглой раме 8 - поступательное смещение, параллельное оси BB, и вращение вокруг оси BB.
Средство 11 передачи связано с передаточным шатуном 13 второй механической связью. Средство 11 передачи содержит канавку 12 и передаточный шатун 13 содержит штифт 14, располагаемый в канавке 12. Эта вторая механическая связь образована, таким образом, канавкой 12 и штифтом 14, который может перемещаться в этой канавке 12. Таким образом, третье перемещение средства 11 передачи влечет за собой движение штифта 14 в канавке 12 и затем четвертое перемещение передаточного шатуна 13.
Это четвертое перемещение передаточного шатуна 13 соответствует информации, предоставляемой средством 6 возврата информации о положении механизма 5 управления, которая характеризует текущую величину шага вторых лопастей 26 толкающего винта 25, действительно применяемую механизмом 27 полета, обозначаемую как "отслеживаемая величина".
Эта канавка 12 образована двумя прямыми линиями, имеющими два различных наклона. Средство 6 возврата информации применяет, благодаря этим двум прямым линиям с различными наклонами, изменяемое отслеживаемое передаточное число к отслеживаемой величине. Это отслеживаемое передаточное число тогда пропорционально наклону канавки 12 и преимущественно является функцией положения штифта 14 в канавке 12 и, таким образом, функцией отслеживаемой величины.
Например, считаем, что отслеживаемое передаточное число равно единице, когда штифт 14 расположен на уровне первого наклона канавки 12, так, как показано на Фиг.3. Это первое положение средства 11 передачи соответствует малой величине совместного шага вторых лопастей 26, что характеризует малую тягу, даже нулевую тягу, толкающего винта 25.
Это отслеживаемое передаточное число равно шести, когда штифт 14 расположен на уровне второго наклона канавки 12, так, как представлено на Фиг.4 и 5. Это второе положение средства 11 передачи соответствует значительной величине совместного шага вторых лопастей 26, что характеризует значительную тягу, даже максимальную тягу, толкающего винта 25.
Кроме того, механизм 5 управления и средство 6 возврата информации расположены внутри корпуса 10 коробки силовой передачи толкающего винта 41, как показано на Фиг.3. Средство 6 возврата информации расположено, таким образом, внутри зоны, заполненной маслом. Фактически, средство 6 возврата информации и, в частности, вторая механическая связь, образованная канавкой 12 и штифтом 14, фактически оказываются постоянно смазанными.
Передаточный шатун 13 жестко связан с первым стременем 15, при этом четвертое перемещение передаточного шатуна 13 приводит к пятому перемещению первого стремени 15. Кроме того, передаточный шатун 13 связан с круглой рамой 8 четвертым шарнирным соединением 29. Фактически, четвертое перемещение передаточного шатуна 13 представляет собой вращение вокруг оси AA вращения этого четвертого шарнирного соединения 29 и, затем, пятое перемещение первого стремени также представляет собой вращение вокруг оси AA вращения.
Кроме того, это пятое перемещение первого стремени 15 влечет за собой вращение первого шарнирного соединения 17 вокруг оси AA вращения. Затем это вращение первого шарнирного соединения 17 влечет за собой шестое перемещение второго стремени 16.
Это шестое перемещение второго стремени 16 влечет за собой дополнительное перемещение управляющего шатуна 7, которое объединяется со вторым перемещением этого управляющего шатуна 7, изменяя команду системы управления полетом и регулируя, таким образом, изменение шага вторых лопастей 26 каждого толкающего винта 25 с помощью средства 4 воздействия и механизма 27 полета.
Это пятое перемещение первого стремени 15 и это шестое перемещение второго стремени 16 создают также уменьшение первого и второго расстояний L1, L2, при этом ось D остается неизмененной. Передаточное число управления, применяемое средством 3 управления к управляющей команде системы управления полетом, таким образом, изменяется. Изменение этого передаточного числа управления реализуется в зависимости от отслеживаемой величины.
Вместе с тем изменение этого передаточного числа управления мало, именно по отношению к изменению отслеживаемого передаточного числа. Это изменение этого передаточного числа управления составляет порядка 5% и, таким образом, незначительно, при этом угловой интервал первого и второго стремян 15, 16 составляет порядка +/-30°.
Система 1 адаптивного управления полетом позволяет преимущественно изменять отслеживаемое передаточное число, применяемое к отслеживаемой величине, и передаточное число управления, применяемое, с одной стороны, к первой управляющей команде педального управления 31, и, с другой стороны, ко второй управляющей команде рычага 33 управления тягой толкающих винтов 25 в зависимости от отслеживаемой величины. Эта отслеживаемая величина, которая характеризует текущую величину шага вторых лопастей 26 толкающих винтов 25, действительно используемую механизмом 27 полета, позволяет задавать тягу, создаваемую каждым толкающим винтом 25, и составляет, таким образом, надежный и устойчивый указатель скорости поступательного движения гибридного вертолета 20.
Принципиальная схема, показанная на Фиг.6, позволяет резюмировать функционирование системы 1 адаптивного управления полетом.
В соответствии с этой принципиальной схемой, средство 4 воздействия управляет средством 9 усиления, которое приводит в действие механизм 5 управления для изменения шага вторых лопастей 26 толкающего винта 25 посредством механизма 27 полета.
Средство 6 возврата информации предоставляет отслеживаемую величину 52 на средство 3 управления, которое ее объединяет с управляющей командой 51 для формирования команды 53 изменения шага вторых лопастей 26.
Средство 6 возврата информации содержит первое средство 46 применения отслеживаемого передаточного числа к отслеживаемой величине 52, при этом это отслеживаемое передаточное число является переменным в зависимости от самой этой отслеживаемой величины 52.
Средство 3 управления содержит второе средство 45 применения передаточного числа управления к управляющей команде 51, при этом это передаточное число управления является переменным в зависимости от отслеживаемой величины 52. Средство 3 управления содержит также вычитающее устройство 44, позволяющее вычитать из управляющей команды 51, к которой было применено передаточное число управления, отслеживаемую величину 52, к которой было применено отслеживаемое передаточное число. Выход этого вычитающего устройства 44 образует команду 53 изменения шага вторых лопастей 26, которая предоставляется на средство 4 воздействия.
Система 1 адаптивного управления полетом позволяет, таким образом, существенно сократить влияние пилота на педальное управление 31 и на рычаг 33 тяги, для значительных скоростей поступательного движения, минимизируя их воздействия на поведение гибридного вертолета 20. В результате, полет гибридного вертолета 20 может проходить более уверенно, благодаря использованию системы 1 адаптивного управления полетом.
Естественно, что настоящее изобретение может быть подвержено многочисленным изменениям при его осуществлении. И хотя было описано несколько вариантов реализации, ясно, что они не исчерпывают все возможные примеры реализации изобретения. Изобретение предусматривает замену описанного средства эквивалентным средством, не выходя за пределы объема притязаний настоящего изобретения.
Группа изобретений относится к системе адаптивного управления полетом для летательного аппарата, системе силовой передачи толкающего винта и летательному аппарату. Система адаптивного управления содержит средство управления, механизм управления, средство управления с управляющим шатуном, средство возврата информации для системы управления полетом. Система силовой передачи толкающего винта содержит систему адаптивного управления полетом и коробку силовой передачи толкающего винта. Летательный аппарат содержит систему управления полетом, механизм полета, систему силовой передачи толкающего винта, механическую кинематическую цепь управления полетом, расположенные определенным образом. Обеспечивается повышение надежности системы адаптивного управления полетом самолета. 3 н. и 13 з.п. ф-лы, 6 ил.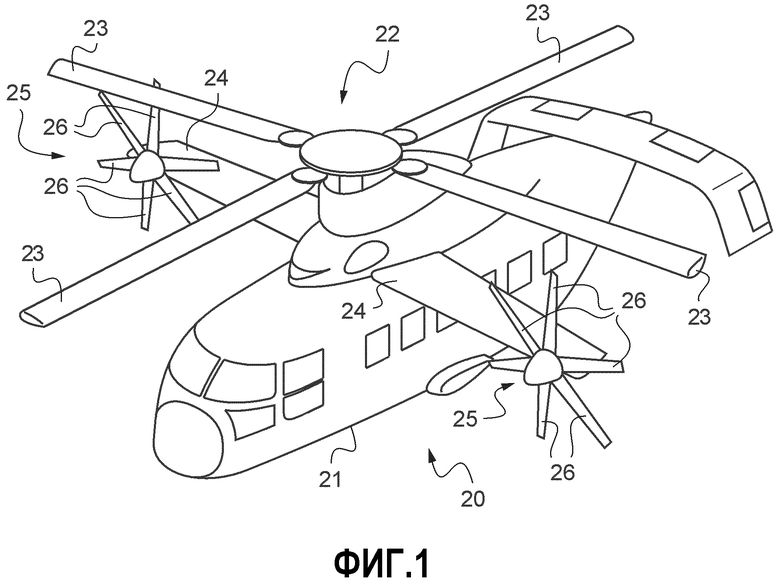
1. Система (1) адаптивного управления полетом для летательного аппарата (20), предназначенная для изменения передаточного числа, применяемого к отслеживаемой величине вышеупомянутой системы управления полетом, вышеупомянутая система (1) адаптивного управления полетом, содержащая
- средство (2) управления, обеспечивающее управляющую команду системы управления полетом посредством первого перемещения упомянутого средства (2) управления,
- механизм (5) управления, предназначенный для управления механизмом (27) полета упомянутого летательного аппарата (20),
- средство (3) управления, содержащее управляющий шатун (7) и применяющее передаточное число управления для преобразования вышеупомянутой управляющей команды системы управления полетом в команду управления полетом и передающее вышеупомянутую команду управления полетом на средство (4) воздействия посредством второго перемещения вышеупомянутого управляющего шатуна (7),
- вышеупомянутое средство (4) воздействия, превращающее вышеупомянутую команду управления полетом в действие системы управления полетом и применяющее вышеупомянутое действие управления полетом к упомянутому механизму (5) управления, и
- средство (6) возврата информации, предоставляющее указанному средству (3) управления отслеживаемую величину вышеупомянутой системы управления полетом, вышеупомянутая отслеживаемая величина является текущей величиной вышеупомянутой системы управления полетом, действительно применяемой вышеупомянутым механизмом (27) полета,
отличающаяся тем, что вышеупомянутое средство (6) возврата информации применяет переменное отслеживаемое передаточное число к вышеупомянутой отслеживаемой величине вышеупомянутой системы управления полетом, вышеупомянутое переменное отслеживаемое передаточное число, зависящее от вышеупомянутой отслеживаемой величины вышеупомянутой системы управления полетом.
2. Система (1) адаптивного управления полетом по п.1,
отличающаяся тем, что вышеупомянутое средство (6) возврата информации содержит средство (11) передачи и передаточный шатун (13), применяющие вышеупомянутое отслеживаемое передаточное число к вышеупомянутой отслеживаемой величине вышеупомянутой системы управления полетом, вышеупомянутое средство (11) передачи, связанное с вышеупомянутым механизмом (5) управления первой механической связью, обладающей, по меньшей мере, одной степенью свободы, вышеупомянутым механизмом (5) управления, провоцирующим третье перемещение упомянутого средства (11) передачи, которое может повлечь за собой четвертое перемещение вышеупомянутого передаточного шатуна (13).
3. Система (1) адаптивного управления полетом по п.2,
отличающаяся тем, что вышеупомянутое средство (11) передачи снабжено канавкой (12) и вышеупомянутый передаточный шатун (13) снабжен штифтом (14), расположенным в вышеупомянутой канавке (12), вышеупомянутое третье перемещение упомянутого средства (11) передачи влечет за собой перемещение вышеупомянутого штифта (14) в вышеупомянутой канавке (12) и затем может повлечь за собой вышеупомянутое четвертое перемещение вышеупомянутого передаточного шатуна (13), вышеупомянутое перемещение вышеупомянутого штифта (14) в вышеупомянутой канавке (12) может повлечь за собой изменение вышеупомянутого отслеживаемого передаточного числа.
4. Система (1) адаптивного управления полетом по любому одному из пп.2-3,
отличающаяся тем, что вышеупомянутое средство (11) передачи обладает только возможностью поступательного движения.
5. Система (1) адаптивного управления полетом по любому одному из пп.1-3,
отличающаяся тем, что вышеупомянутое средство (3) управления применяет к вышеупомянутой управляющей команде системы управления полетом передаточное число управления, варьирующееся в зависимости от вышеупомянутой отслеживаемой величины вышеупомянутой системы управления полетом.
6. Система (1) адаптивного управления полетом по п.5,
отличающаяся тем, что вышеупомянутое средство (3) управления содержит первое стремя (15), связанное с вышеупомянутым средством (6) возврата информации, и второе стремя (16), связанное с вышеупомянутым первым стременем (15), с вышеупомянутым средством (2) управления и с вышеупомянутым управляющим шатуном (7), вышеупомянутым средством (6) возврата информации, приводящим к пятому перемещению упомянутого первого стремени (15), вышеупомянутому пятому перемещению упомянутого первого стремени (15), влекущему за собой шестое перемещение упомянутого второго стремени (16) и изменяющему, таким образом, вышеупомянутое передаточное число управления, применяемое к вышеупомянутому управляющей команде системы управления полетом.
7. Система (1) адаптивного управления полетом по п.5,
отличающаяся тем, что, вышеупомянутое средство (6) возврата информации содержит средство (11) передачи и передаточный шатун (13), вышеупомянутое средство (3) управления содержит первое стремя (15), связанное с вышеупомянутым передаточным шатуном (13), и второе стремя (16), связанное с вышеупомянутым первым стременем (15), с вышеупомянутым средством (2) управления и с вышеупомянутым управляющим шатуном (7), вышеупомянутое четвертое перемещение вышеупомянутого передаточного шатуна (13) влечет за собой пятое перемещение упомянутого первого стремени (15), вышеупомянутое пятое перемещение упомянутого первого стремени (15) влечет за собой шестое перемещение упомянутого второго стремени (16) и изменяет, таким образом, вышеупомянутое передаточное число управления, применяемое к вышеупомянутой управляющей команде системы управления полетом.
8. Система (1) адаптивного управления полетом по п.7,
отличающаяся тем, что вышеупомянутый передаточный шатун (13) жестко связан с вышеупомянутым первым стременем (15), вышеупомянутое четвертое перемещение вышеупомянутого передаточного шатуна (13) и вышеупомянутое пятое перемещение упомянутого первого стремени (15) являются вращением вокруг одной и той же оси вращения (AA).
9. Система (1) адаптивного управления полетом по п.7,
отличающаяся тем, что вышеупомянутое второе стремя (16) связано с вышеупомянутым первым стременем (15) первым шарнирным соединением (17), вышеупомянутое пятое перемещение упомянутого первого стремени (15) влечет за собой перемещение вышеупомянутого первого шарнирного соединения (17).
10. Система (1) адаптивного управления полетом по п.7,
отличающаяся тем, что вышеупомянутое средство (2) управления связано с вышеупомянутым вторым стременем (16) вторым шарнирным соединением (18) и вышеупомянутое первое перемещение упомянутого средства (2) управления влечет за собой вращение упомянутого второго стремени (16) вокруг вышеупомянутого первого шарнирного соединения (17) в зависимости от управляющей команды системы управления полетом.
11. Система (1) адаптивного управления полетом по п.7,
отличающаяся тем, что вышеупомянутое средство (6) возврата информации постоянно располагается внутри смазываемой зоны.
12. Система силовой передачи толкающего винта (40), содержащая систему (1) адаптивного управления полетом и коробку (41) силовой передачи толкающего винта,
отличающаяся тем, чем вышеупомянутая система (1) адаптивного управления полетом является системой по п.2.
13. Система силовой передачи толкающего винта (40) по п.12,
отличающаяся тем, что вышеупомянутое средство (6) возврата информации расположено внутри вышеупомянутой коробки (41) силовой передачи толкающего винта, чтобы вышеупомянутое средство (6) возврата информации было постоянно смазано.
14. Летательный аппарат (20), содержащий, по меньшей мере, механизм (27) полета так же, как, по меньшей мере, систему (31,33) управления полетом и, по меньшей мере, механическую кинематическую цепь (32,34) управления полетом для управления вышеупомянутым механизмом (27) полета,
отличающийся тем, что вышеупомянутый летательный аппарат (20) содержит, по меньшей мере, систему силовой передачи толкающего винта (40) по п.12, расположенную между механической кинематической цепью (32,34) управления полетом и вышеупомянутым механизмом (27) полета.
15. Летательный аппарат (20) по п.14,
отличающийся тем, что вышеупомянутый летательный аппарат (20) представляет собой винтокрылый летательный аппарат, содержащий фюзеляж (21), по меньшей мере, главный несущий винт (22), снабженный первыми лопастями (23) и, по меньшей мере, два толкающих винта (25), расположенных с одной и с другой стороны упомянутого фюзеляжа (21) и снабженных вторыми лопастями (26), каждая система силовой передачи толкающего винта (40) располагается между вышеупомянутыми механическими кинематическими цепями (32,34) управления шагом вышеупомянутых вторых лопастей (26) вышеупомянутых толкающих винтов (25) и вышеупомянутых толкающих винтов (25).
16. Летательный аппарат (20) по п.15,
отличающийся тем, что первая система управления полетом представляет собой педальное управление (31) по углу рысканию упомянутого летательного аппарата (20), управляющее дифференциальным образом вышеупомянутым шагом вышеупомянутых вторых лопастей (26) вышеупомянутых толкающих винтов (25), и вторая система управления полетом представляет собой рычаг (33) управления тягой вышеупомянутых толкающих винтов (25), управляющий идентичным образом вышеупомянутым шагом вышеупомянутых вторых лопастей (26) вышеупомянутых толкающих винтов (25), вышеупомянутые первая и вторая системы управления полетом совместным образом действуют на вышеупомянутые средства (2) управления системы (1) адаптивного управления полетом каждой системы силовой передачи толкающего винта (40).
| US 4385741 A1, 31.05.1983 | |||
| US 2940332 A1, 14.06.1960 | |||
| Способ градуировки гидрофонов методом эталонного излучателя | 2016 |
|
RU2620772C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С НЕСУЩИМ ВИНТОМ, СОДЕРЖАЩЕГО, ПО МЕНЬШЕЙ МЕРЕ, ОДИН ТОЛКАЮЩИЙ ВИНТ, УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПИЛОТИРОВАНИЯ И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2513189C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ГИБРИДНОГО ВЕРТОЛЕТА | 2012 |
|
RU2525357C2 |

