Область техники
Настоящее изобретение относится к строительным лесам, которые могут быть смонтированы автоматически, обеспечивающим доступ к высоким зданиям во время процессов строительства, ремонта, покраски, нанесения покрытия и технического обслуживания.
Уровень техники
В применяемых в настоящее время конфигурациях строительных лесов указывается вариант осуществления, содержащий несколько несущих пластин, на которых выполнены несколько опорных элементов, и несколько промежуточных контактных стержней, которые соединяются с опорными элементами, и который обеспечивает складывание посредством опорных элементов указанной несущей пластины. В данной конфигурации предусматривается, что строительные леса раскладываются и складываются посредством сдвигающего устройства посредством промежуточных контактных стержней и, таким образом, строительные леса поднимаются.
В ходе проведения патентного поиска относительно строительных лесов была обнаружена заявка Германии № ЕР 07001953.4. В данной заявке указан способ изготовления строительных лесов, в котором возводят стену, при этом указанная стена защищает последнюю закладку при помощи стержневых крепежных элементов, имеющих заднюю крепежную пластину, и при этом крепежные стержни соединяются с задней поверхностью стены; при этом грунт заполняется ярусами, и после того как ярус был создан, набор горизонтальных крепежных стержней располагают под водой на указанном ярусе на определенном расстоянии друг от друга, при этом крепежные пластины соединяются с концами указанных крепежных стержней, при этом предусмотрены места соединения со стеной, с которыми сзади соединяется крепежный элемент, и по меньшей мере один дополнительный ярус грунта расположен на нижнем ярусе.
Другой заявкой является заявка № TR 1999/00311. В данной заявке устройство, состоящее из транспортных блоков, снабжено соединительным блоком, содержащим клиновую соединительную головку с горизонтальной щелью, которая должна быть надета на пористое кольцо, насаженное на стержень. Для клина, который может быть вставлен через соединительную головку и пористое кольцо, предусмотрены отверстия в форме клина. Соединительная головка, отлитая из ковкого чугуна, содержит вмещающую часть и соединительную часть. Для того чтобы вмещающая часть была насажена на стержень, она содержит части для вставки в стену с местами для вставки.
С другой стороны, в другой заявке Турции № TR 2008/05306 указана система строительных лесов, которая разработана для применения на поверхностях зданий и при строительстве. Система строительных лесов согласно указанному изобретению содержит несущий элемент строительных лесов, при этом строительные леса выполнены из системы пространственной рамы посредством оснащения указанного несущего элемента, приводного блока строительных лесов, других их частей, тормозных систем шкива виброгасителя, систем шкива виброгасителя и троса.
В другой заявке Турции № TR 2006/01339 указана система соединения клиновых строительных лесов, которая может быть легко смонтирована, допускающая соединение в диагональном направлении более одной горизонтальной трубы, выполняемое для монтажа систем строительных лесов в таких процессах, как выполнение наружной обшивки, покраска внутренней и наружной обшивки, покраска и изоляция, строительство и техническое обслуживание навесных стен и кораблей, строительство и техническое обслуживание туннелей, дамб, мостов, высоких перегородок, установка полок на высоких сооружениях для трибун и целей хранения; характеризующаяся тем, что содержит вертикальную трубу, горизонтальную трубу, деталь в виде ласточкина хвоста, клин, фланец (центральный) и диагональные элементы при необходимости.
Применяемые в настоящее время системы строительных лесов требуют значительные продолжительности и усилий для процессов монтажа и демонтажа строительных лесов, поскольку у них нет автоматической конструкции. Все это отрицательно влияет на процессы производства и затраты.
Цели изобретения
Целью настоящего изобретения, отличающегося от конфигураций строительных лесов, используемых в современном уровне техники, является предоставление автоматического поднятия и автоматического опускания строительных лесов.
Целью изобретения является осуществление процесса монтажа строительных лесов за очень короткое время посредством блока управления или устройства дистанционного управления.
Целью изобретения является предоставление строительных лесов, которые могут быть легко смонтированы без значительных усилий. Конкретной целью является устранение посредством настоящей системы производственных потерь, проявляющихся во время процессов монтажа строительных лесов.
Другой целью настоящего изобретения является предоставление материалов и элементов, применяемых при возведении строительных лесов, имеющих высокую прочность и высокую устойчивость. Таким образом, целью является обеспечение надежности и безопасности работы.
Другой целью настоящего изобретения является выполнение необходимых измерений и разметки ширины и высоты в зависимости от ширины и высоты сооружения. Таким образом, целью является транспортировка материалов в соответствии с потребностями без транспортировки излишнего количества материалов и элементов к месту, где будут смонтированы строительные леса.
Дополнительной целью настоящего изобретения является уменьшение общего времени, стоимости, числа рабочих и времени для монтажа строительных лесов до минимального уровня. Таким образом, целью является положительное влияние на технологические процессы посредством быстрого, безопасного и простого монтажа.
Дополнительной целью настоящего изобретения является необязательное добавление платформ для перехода на каркасе строительных лесов, образованных в вертикальном и горизонтальном направлениях в современных системах строительных лесов, в зависимости от необходимости и желания. (При необходимости платформы не добавляются на строительные леса.) Могут быть смонтированы заполненные наполовину или полностью заполненные платформы. Однако в системе согласно настоящему изобретению без размещения платформы полной ширины и длины на перекрытии следующее перекрытие не может быть сконструировано на ней. С другой стороны, в текущих системах строительных лесов все желаемые платформы на смонтированных строительных лесах удаляются, и строительные леса выполняют без платформ. В системе согласно настоящему изобретению ни одну из платформ для перехода на любом перекрытии нельзя удалять, и для удаления платформы на промежуточном перекрытии систему необходимо полностью разобрать сверху донизу.
Для достижения вышеуказанных целей модуль строительных лесов, содержащий несколько ярусов, уложенных друг на друга, содержит подвижные колонны, обеспечивающие его раскладывание посредством приводного узла таким образом, что они задают рабочее расстояние (А) между указанными ярусами модуля, вертикальные и горизонтальные профили, расположенные между каждым из ярусов модуля в пределах указанного рабочего расстояния (А), и направляющие валы, расположенные на несущих пластинах и обеспечивающие закрепление вертикальных несущих профилей.
Описание графических материалов
Фиг. 1 представляет собой вид спереди в перспективе строительных лесов с автоматическим монтажом согласно настоящему изобретению.
Фиг. 2 представляет собой вид в перспективе крупным планом подвижной конструкции, обеспечивающей монтаж, несущие пластины строительных лесов и рейки.
Фиг. 3 представляет собой вид в перспективе крупным планом сложенных пластин, некоторые из которых разложены, а некоторые - не разложены.
Фиг. 4 представляет собой изображение вида крупным планом несущих реек, расположенных на пластинах строительных лесов, и сложенные пластины строительных лесов.
Фиг. 5 представляет собой общий вид в перспективе строительных лесов с автоматическим монтажом согласно настоящему изобретению, когда они сложены.
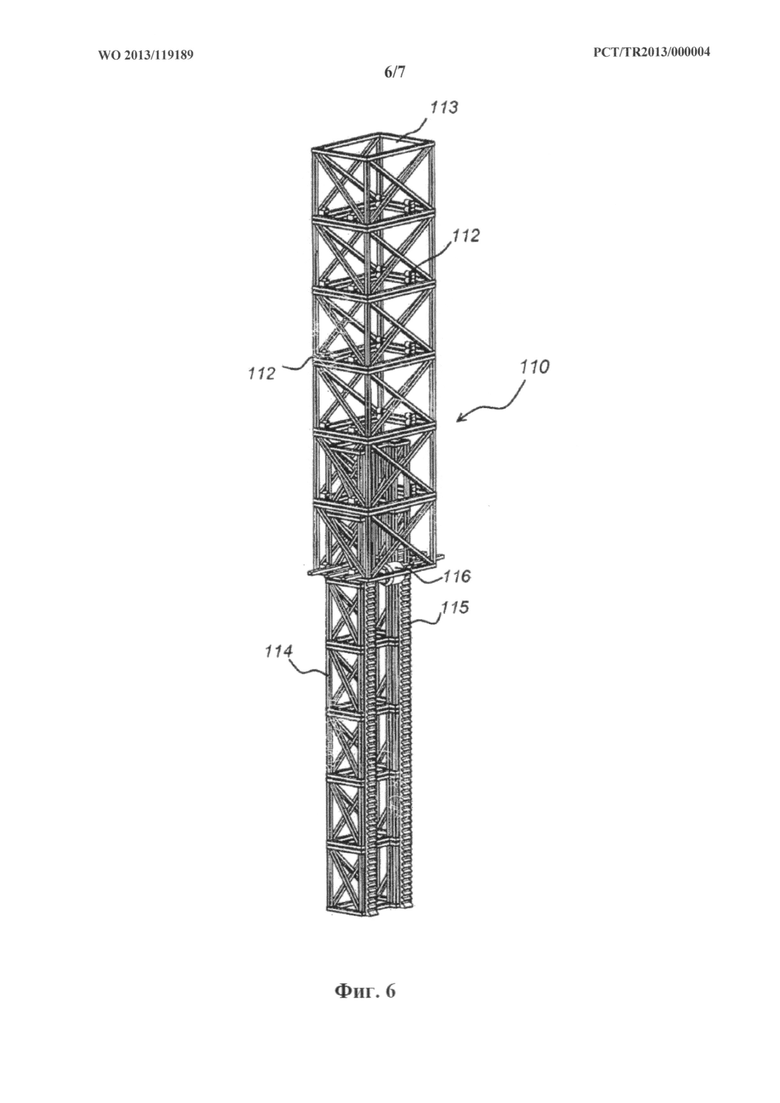
Фиг. 6 представляет собой монтажный вид спереди в перспективе подвижных колонн, показанных отдельно.
Фиг. 7 представляет собой общий вид в перспективе пластин строительных лесов в нерабочем положении, когда их передние крышки частично подняты.
Позиционные обозначения
100 - Автоматические строительные леса
110 - Подвижные колонны
111 - Наружная несущая колонна
112 - Центрирующие элементы
113 - Пространство для перемещения
114 - Внутренняя подвижная колонна
115 - Управляющая рейка
116 - Приводной блок
117 - Круговая шестерня
118 - Несущая пластина
119 - Вертикальные несущие профили
120 - Горизонтальные профили
121 - Короткие горизонтальные профили
122 - Передние крышки
123 - Лестница
124 - Элементы для размещения профиля
125 - Направляющие элементы
126 - Направляющая ступень
127 - Ролики
128 - Направляющий зазор
129 - Становочные пяты
130 - Модуль строительных лесов
131 - Ярус модуля
132 - Устройство дистанционного управления
А - Рабочее расстояние
Подробное описание изобретения
Настоящее изобретение относится к автоматическим строительным лесам (100), предоставляющим доступ к высотным зданиям в таких процессах, как строительство, ремонт, покраска, нанесение покрытия и техническое обслуживание; характеризующимся тем, что они содержат модуль (130) строительных лесов, содержащий несколько накладывающихся друг на друга ярусов (131), подвижные колонны (110), обеспечивающие его раскладывание посредством приводного блока (116) для создания рабочего расстояния (А) между указанными ярусами (131) модуля, вертикальные и горизонтальные профили (119, 120), расположенные между каждым из ярусов (131) модуля в пределах указанного рабочего расстояния (А), и направляющие элементы (125), расположенные на несущих пластинах (118) и обеспечивающие закрепление вертикальных несущих профилей (119).
Наружные несущие колонны (111) перемещают вверх модули (130) строительных лесов, с которыми они соединены, в направлении s посредством движения, сообщенного им указанным приводным блоком (116), и при этом указанный приводной блок (116) представляет собой двигатель. В другом случае приводной блок (116) может представлять собой поршень с гидравлической или пневматической системой.
Изобретение содержит круговую шестерню (117), воспринимающую вращательное движение от указанного приводного блока (116), и управляющую рейку (115), с которой соединена указанная круговая шестерня (117), внутреннюю подвижную колонну (114), на которой закреплена указанная управляющая рейка (115) и которая расположена в пространстве (113) для перемещения указанной наружной несущей колонны (111), несколько центрирующих элементов (112), содержащих ролики (127), обеспечивающие линейное движение указанной внутренней подвижной колонны (114) внутри наружной несущей колонны (111), направляющие ступени (126), выполненные на указанных направляющих элементах (125), направляющие зазоры (128), выполненные в несущей пластине (118) для возможности размещения направляющих элементов (125), элементы (124) для размещения, обеспечивающие размещение и закрепление вертикальных, горизонтальных и коротких профилей (119, 120, 121) на указанной несущей пластине (118), передние крышки (122), закрепленные на ярусах (131) указанного модуля (130) строительных лесов, и становочные пяты (129), расположенные внизу указанных вертикальных несущих профилей (119) и закрепленные на земле.
Рабочая система автоматических строительных лесов (100) выполнена следующим образом: система, которая может быть отрегулирована относительно значений измерения ширины конструкции или здания и которая содержит несколько подвижных колонн (110), может быть перевезена или целиком на длинном транспортном средстве, или по частям, благодаря своей модульной конструкции.
На фиг. 5 показан модуль (130) строительных лесов, который предпочтительно состоит из 11 ярусов (131) модуля на предпочтительно 4 подвижных колоннах (110). На фиг.5 показан вид несмонтированных строительных лесов. Для запуска автоматического процесса монтажа системой можно управлять посредством блока управления или устройства (132) дистанционного управления. Модули (130) строительных лесов перемещают вверх в направлении s целиком таким образом, что один ярус (131) модуля остается внизу. После того как ярус (131) А1 модуля остается внизу, другие модули (130) строительных лесов перемещаются целиком в направлении s таким образом, что образуется рабочее расстояние (А). Рабочее расстояние (А) составляет приблизительно 2 метра в высоту, при этом в нем может работать с комфортом один человек. После образования рабочего расстояния (А) ярус (131) А2 модуля располагают с интервалом, а все остальные ярусы (131) поднимаются вверх. Затем, снова ярус (131) A3 модуля располагают с интервалом, при этом ярусы (131) модулей (130) строительных лесов отделены с образованием промежуточных расстояний (см. фиг. 1).
Подвижные колонны (110) обеспечивают перемещение и расположение с интервалом в направлении s-s1 модулей (130) строительных лесов как единого целого.
С другой стороны, подвижные колонны (110) обеспечивают раскладывание и складывание строительных лесов следующим образом: модули (130) строительных лесов нагружают на наружную несущую колонну (111). Иными словами, несущие колонны (111) выдерживают полную нагрузку. Однако вертикальное движение вверх и вниз обеспечивается посредством внутренних подвижных колонн (114) относительно наружных несущих колонн (111). Таким образом, вся нагрузка системы приходится на внутреннюю подвижную колонну (114). Внутренняя подвижная колонна (114) расположена в пространстве (113) для перемещения наружной несущей колонны (111), и в этом пространстве (113) система имеет возможность перемещаться. Предусматривается вертикальное линейное движение наружной несущей колонны (111) в направлениях s-s 1 посредством управляющей рейки (115), закрепленной на внутренней подвижной колонне (114), и круговой шестерни (117), приводимой в действие двигателем на наружной колонне (см. фиг.6). Центрирующие элементы (112) расположены в пространстве (113) для перемещения наружной несущей колонны (111) для обеспечения того, чтобы движение было жестко заданным и строго прямолинейным. Центрирующие элементы (112) содержат ролики (127), посредством которых колонны имеют возможность более простого прохождения.
С другой стороны, на фиг.7 модуль (130) строительных лесов показан отдельно. Ярусы (131) модуля расположены в накладывающемся положении. Направляющие элементы (125) уложены или отцентрированы между ярусами (131) модуля. Направляющие элементы (125) расположены в направляющих зазорах (128) несущей пластины (118) и в то же время служат в качестве опорных элементов для вертикальных несущих профилей (119), расположенных между каждым из ярусов (131) модуля. Рабочее расстояние (А) образовано посредством направляющих элементов (125) и вертикальных несущих профилей (119). При помощи элементов (124) для размещения профиля горизонтальные, вертикальные и короткие профили (119, 120, 121) располагают на несущей пластине (118) (см. фиг. 4). После образования рабочего расстояния (А) рабочие прикрепляют горизонтальные, вертикальные и короткие профили (119, 120, 121) к направляющим элементам (125) с защелкиванием (см. фиг. 2). Накладывание ярусов (131) модуля, образующих модуль (130) строительных лесов, обеспечивается посредством направляющих зазоров (128), выполненных в несущих пластинах (118), и направляющих элементов (125), расположенных в этих зазорах (128). Верхние концы направляющих элементов (125) имеют ступени (126), а нижние концы направляющих элементов (125) плотно прилегают к ступеням, накладываются друг на друга и закрываются. Когда модульные ярусы (131) разложены, вертикальные несущие профили (119) закрепляют между каждым из направляющих элементов (125).
Несущие пластины (118) имеют однокомпонентную конструкцию и предпочтительно могут изготавливаться с модульной многокомпонентной конструкцией. Вертикальные несущие профили (119) образуют каркасную конструкцию путем вставки между несущими пластинами (118). Поскольку несущие пластины (118) содержат платформу и линию перехода, платформа для перехода на любом перекрытии строительных лесов согласно настоящему изобретению не может быть удалена, и для удаления платформы на среднем перекрытии вся система должна быть разобрана сверху донизу.
Для образования рабочего расстояния (А) на каждом ярусе (131) модуля предусмотрены вертикальные, горизонтальные и короткие профили (119, 120, 121). Эти профили быстро устанавливаются рабочими, и в ярусе обеспечивается рабочее расстояние (А). Проход от одного яруса (131) модуля к другому обеспечивается посредством лестницы (123). Для перемещения подвижных колонн (110) применяется двигатель, действующий как приводной блок (116). Однако вместо двигателя возможно использование предпочтительно ручного труда, а также подвижные колонны (110) могут линейно перемещаться вверх посредством подъемников с гидравлической или пневматической системой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРА КОНТЕЙНЕРА В САЛОНЕ АВТОМОБИЛЯ | 2009 |
|
RU2481974C2 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ БОКОВЫХ УПЛОТНЯЮЩИХ ПЛАСТИН | 2016 |
|
RU2719240C1 |
| Устройство для изготовления литых т-образных бетонных изделий | 1973 |
|
SU615844A3 |
| ПОДАЮЩИЙ БЛОК ДЛЯ БУРОВОЙ УСТАНОВКИ И БУРОВАЯ УСТАНОВКА С ПОДАЮЩИМ БЛОКОМ | 2009 |
|
RU2492311C2 |
| ГРУЗОВАЯ ПОВОЗКА С ОПРОКИДЫВАЮЩИМСЯ НА БОК КУЗОВОМ | 1927 |
|
SU9457A1 |
| ПЕРЕДАТОЧНОЕ УСТРОЙСТВО И ПРЕДНАЗНАЧЕННАЯ ДЛЯ НЕГО ПРИВОДНАЯ СИСТЕМА ДЛЯ МНОГОПОЗИЦИОННЫХ ПРЕССОВ С АВТОМАТИЧЕСКОЙ ПЕРЕДАЧЕЙ ОБРАБАТЫВАЕМЫХ ЗАГОТОВОК С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1988 |
|
RU2020073C1 |
| Устройство для автоматической подачи пруткового материала | 1973 |
|
SU722467A3 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПЕРЕМЕЩЕНИЯ УЧАСТКА ГОРНОРУДНОГО ТРАНСПОРТЕРА | 2004 |
|
RU2367796C2 |
| СЕЙСМОСТОЙКАЯ СТРОИТЕЛЬНАЯ СИСТЕМА | 1993 |
|
RU2110640C1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |






Изобретение относится к автоматическим строительным лесам (100), обеспечивающим доступ к высотным зданиям. Леса (100) включают модуль (130), содержащий несколько накладывающихся друг на друга ярусов (131), подвижные колонны (110), обеспечивающие их раскладывание посредством приводного блока (116) или вручную для создания рабочего расстояния (А) между указанными ярусами (131). Подвижные колонны (110) содержат наружные несущие колонны (111), перемещающие вверх модули (130) строительных лесов, с которыми они соединены, и внутреннюю подвижную колонну (114), которая соединена с управляющей рейкой (115) и расположена в пространстве (113) для перемещения указанной наружной несущей колонны (111). Вертикальные и горизонтальные профили (119, 120) расположены между ярусами (131) модуля на рабочем расстоянии (А). Несколько несущих пластин (118) содержат направляющие элементы (125), обеспечивающие закрепление указанных вертикальных несущих профилей (119). Способ монтажа автоматических строительных лесов включает следующие этапы: накладывание друг на друга ярусов (131) модуля (130) строительных лесов, соединение указанных ярусов (131) модуля с подвижными колоннами (110), перемещение ярусов (131) модуля вверх и вниз в направлениях s и s-1 посредством указанных подвижных колонн (110), расположение в незакрепленном положении и закрепление по меньшей мере одного яруса (131) модуля на величину в рабочее расстояние (А) при перемещении ярусов (131) модуля вверх, закрепление яруса (131) модуля, расположенного в незакрепленном положении на рабочее расстояние (А), посредством вертикальных и горизонтальных профилей (119, 120), и перемещение других нескольких ярусов (131) модуля вверх (в направлении s). Технический результат - упрощение процесса монтажа строительных лесов. 2 н. и 13 з.п. ф-лы, 7 ил.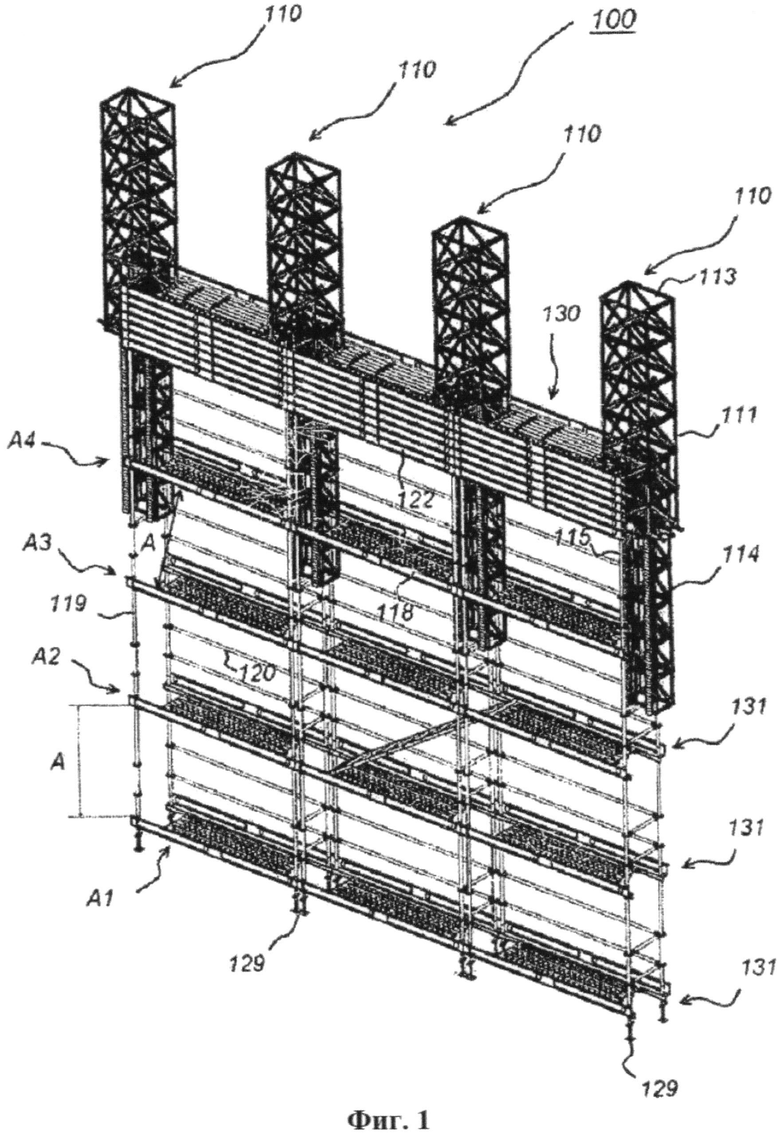
1. Автоматические строительные леса (100), обеспечивающие доступ к высотным зданиям во время процессов строительства, ремонта, покраски, нанесения покрытия и технического обслуживания, отличающиеся тем, что содержат
- модуль (130) строительных лесов, содержащий несколько накладывающихся друг на друга ярусов (131),
- подвижные колонны (110), обеспечивающие их раскладывание посредством приводного блока (116) или вручную для создания рабочего расстояния (А) между указанными ярусами (131) модуля,
- при этом указанные подвижные колонны (110) содержат наружные несущие колонны (111), перемещающие вверх модули (130) строительных лесов, с которыми они соединены, в направлении s посредством указанного приводного блока (116), и
- внутреннюю подвижную колонну (114), которая соединена с управляющей рейкой (115) и расположена в пространстве (113) для перемещения указанной наружной несущей колонны (111),
- вертикальные и горизонтальные профили (119, 120), расположенные между ярусами (131) модуля в указанном рабочем расстоянии (А),
- несколько несущих пластин (118), содержащих направляющие элементы (125), обеспечивающие закрепление указанных вертикальных несущих профилей (119).
2. Автоматические строительные леса по п. 1, отличающиеся тем, что содержат несущую пластину (118), имеющую однокомпонентную и/или модульную конструкцию.
3. Автоматические строительные леса по п. 1, отличающиеся тем, что указанный приводной блок (116) представляет собой двигатель.
4. Автоматические строительные леса по п. 1, отличающиеся тем, что указанный приводной блок (116) представляет собой поршень с гидравлической или пневматической системой.
5. Автоматические строительные леса по п. 1, отличающиеся тем, что содержат круговую шестерню (117), воспринимающую вращательное движение от указанного приводного блока (116), и управляющую рейку (115), которая соединена с указанной круговой шестерней (117).
6. Автоматические строительные леса по п. 1, отличающиеся тем, что содержат несколько центрирующих элементов (112), содержащих ролики (127), обеспечивающие строго линейное движение указанной внутренней подвижной колонны (114) внутри наружной несущей колонны (111).
7. Автоматические строительные леса по п. 1, отличающиеся тем, что содержат направляющие ступени (126), выполненные на указанных направляющих элементах (125).
8. Автоматические строительные леса по п. 1, отличающиеся тем, что содержат направляющие зазоры (128), выполненные в несущих пластинах (118) для возможности размещения указанных направляющих элементов (125).
9. Автоматические строительные леса по п. 1, отличающиеся тем, что содержат элементы (124) для размещения, обеспечивающие размещение и закрепление вертикальных, горизонтальных и коротких профилей (119, 120, 121) на указанной несущей пластине (118).
10. Автоматические строительные леса по п. 1, отличающиеся тем, что содержат передние крышки (122), закрепленные на ярусах (131) указанного модуля (130) строительных лесов.
11. Автоматические строительные леса по п. 1, отличающиеся тем, что содержат становочные пяты (129), расположенные под указанными вертикальными несущими профилями (119) и закрепленные на земле.
12. Автоматические строительные леса по п. 1, отличающиеся тем, что содержат устройство (132) дистанционного управления для запуска и завершения автоматического монтажа и для управления приводным блоком (116).
13. Способ монтажа автоматических строительных лесов (100), обеспечивающих доступ к высотным зданиям во время процессов строительства, ремонта, покраски, нанесения покрытий и технического обслуживания, отличающийся тем, что включает следующие этапы:
- накладывание друг на друга ярусов (131) модуля (130) строительных лесов,
- соединение указанных ярусов (131) модуля с подвижными колоннами (110),
- перемещение ярусов (131) модуля вверх и вниз в направлениях s и s-1 посредством указанных подвижных колонн (110),
- расположение в незакрепленном положении и закрепление по меньшей мере одного яруса (131) модуля на величину в рабочее расстояние (А) при перемещении ярусов (131) модуля вверх,
- закрепление яруса (131) модуля, расположенного в незакрепленном положении на рабочее расстояние (А), посредством вертикальных и горизонтальных профилей (119, 120), и перемещение других нескольких ярусов (131) модуля вверх (в направлении s).
14. Способ по п.13, отличающийся тем, что включает этап, на котором вертикальные, горизонтальные и короткие профили (119, 120, 121) размещают на несущих пластинах (118).
15. Способ по п.13, отличающийся тем, что включает этап, на котором как подвижные колонны (110), так и внутреннюю подвижную колонну (114) перемещают внутри наружной несущей колонны (111) посредством приводного блока (116).
| Устройство для разгонки, например, смежных труб с фланцами | 1961 |
|
SU142963A1 |
| Паровая форсунка | 1928 |
|
SU17554A1 |
| JPH 11247428 A, 14.09.1999. | |||

