Настоящее изобретение относится к комбинированной машине для пробивки и лазерной резки плоского металлического листа.
Комбинированные машины для пробивки и лазерной резки плоских металлических листов представляют собой давно известные решения, которые, к несомненной эффективности отдельных пробивных машин и машин для лазерной резки, добавляют технологическую гибкость, появляющуюся в результате комбинации двух процессов, то есть одного манипулирования металлическим листом посредством лазерной резки, заменяющей пробивные инструменты сложной формы. Таким образом, каждый из двух процессов пробивки и лазерной резки может быть наилучшим образом использован на обрабатываемом металлическом листе в соответствии с геометрией конструкции детали и имеющимися в наличии пробойниками.
В общем конфигурация отдельной пробивной машины представляет собой конфигурацию фиксированного пробивного пресса, оборудованного устройством для смены инструмента, с обрабатываемым листом, перемещающимся в плоскости (XY) декартовой системы координат. В противовес наиболее распространенная конфигурация для отдельной машины для лазерной резки представляет собой конфигурацию с фиксированным обрабатываемым листом и подвижной головкой, хотя существуют решения с фиксированной лазерной головкой и подвижным листом или гибридные решения.
Комбинированные машины для пробивки и лазерной резки представляют собой любые пробивные машины, в которых размещена лазерная головка, но не наоборот. В результате в комбинированных машинах предусмотрена, по меньшей мере, фиксированная пробивная головка, лазерная режущая головка, также фиксированная, и манипулятор перемещения металлического листа в декартовой системе координат в плоскости (XY). Машина такого типа представлена и описана, например, в документе ЕР-0491747-В1.
Кроме того, известны комбинированные машины, которые оборудованы подвижной лазерной режущей головкой, которая позволяет добавлять преимущество в низкой инерции перемещения лазерной головки по отношению к инерции перемещения листа. Существуют решения для обеспечения перемещения лазерной головки по одной оси (у) или по двум ортогональным осям (ху). Очевидно, что перемещение лазерных головок в одном направлении (у) или в двух направлениях (ху) делает сложным управление комбинированным движением лазерной головки и манипулятора в декартовой системе координат (ХУ).
Комбинированные машины с лазерной режущей головкой, перемещающейся в одном направлении (у), описаны в документе JP-2006088214-А, JP-2007038286-А и JP-2009018334-А. Первый патент описывает лазерную режущую головку с перемещением в одном направлении (у), параллельном направлению (У) перемещения манипулятора металлического листа. Второй патент модифицирует перемещение (у) лазерной головки и конструкции манипулятора (ХУ) так, чтобы обеспечивать поперечную сквозную резку металлического листа без пересечения с самим манипулятором и его захватами. И, наконец, третий патент улучшает два предыдущих патента посредством добавления механического решения, которое компенсирует тепловое расширение регулировочного винта перемещения лазерной головки.
Также известна комбинированная машина с перемещением (ху) лазерной головки в дополнение к перемещению (ХУ) манипулятора металлического листа.
Принимая во внимание существующий уровень техники, целью настоящего изобретения является создание комбинированной машины с неподвижной пробивной головкой и подвижной лазерной режущей головкой, которая имеет иной, более удобный вид перемещения лазерной головки.
В соответствии с изобретением такая цель достигается посредством комбинированной машины для пробивки и лазерной резки плоского металлического листа, содержащей неподвижное основание, неподвижную пробивную головку, подвижную лазерную режущую головку и манипулятор для перемещения металлического листа в плоскости (ХУ) декартовой системы координат, отличающейся тем, что упомянутая лазерная головка удерживается структурой в виде циркуля (compass structure), обеспечивающей полярное перемещение (θ) с фиксированным радиусом (ρ), и линейное перемещение (у).
Согласно предпочтительному варианту осуществления полярно-линейное перемещение обеспечивается двумя независимыми приводами, которые определяют прямолинейное перемещение структуры в виде циркуля вдоль линейной направляющей, и открытие и закрытие самой структуры в виде циркуля.
Перемещения лазерной головки могут осуществляться посредством двигателей вращения или линейных двигателей или посредством приводов с винтовой передачей.
Комбинация перемещений манипулятора в декартовой системе координат (ХУ) для перемещения металлического листа и низко-инерционных полярно-линейных перемещений лазерной режущей головки обеспечивает достижение абсолютно конкурентно-способных характеристик и качества работы.
Возможные варианты осуществления комбинированной машины в соответствии с настоящим изобретением показаны при помощи неограничивающего примера на сопроводительных чертежах, на которых:
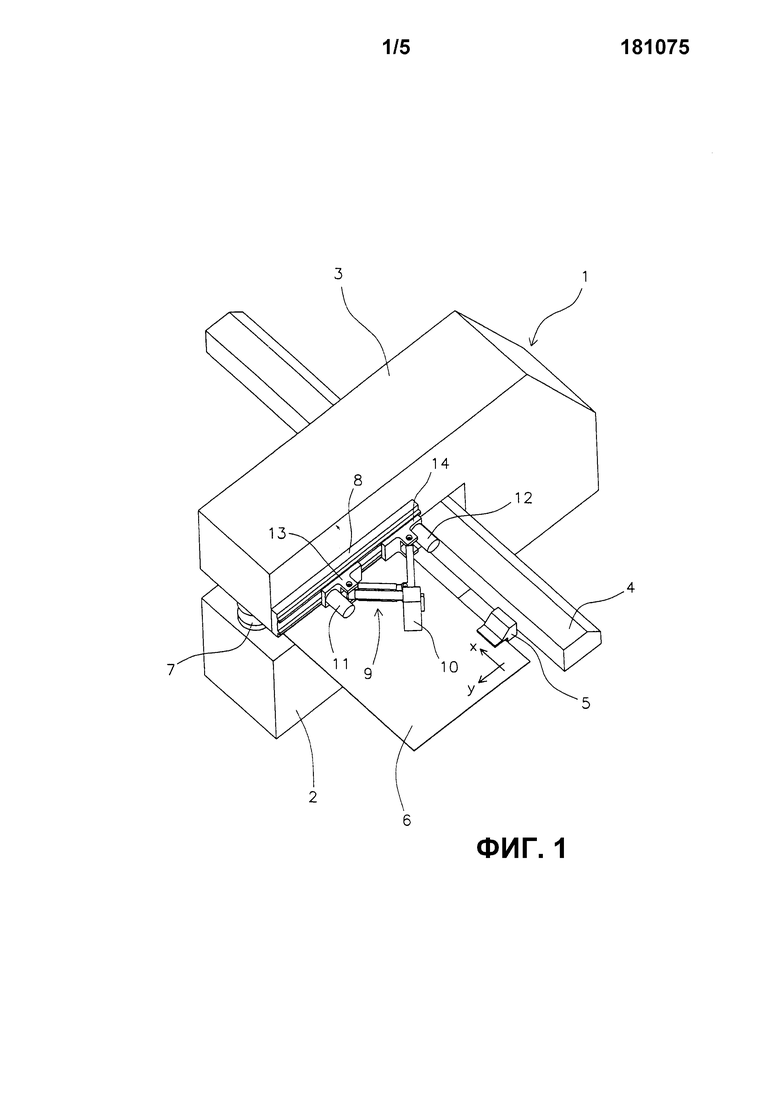
Фиг.1 показывает комбинированную машину с двигателями вращения в состоянии раздвинутого циркуля, расположенного в общей точке линейной направляющей.
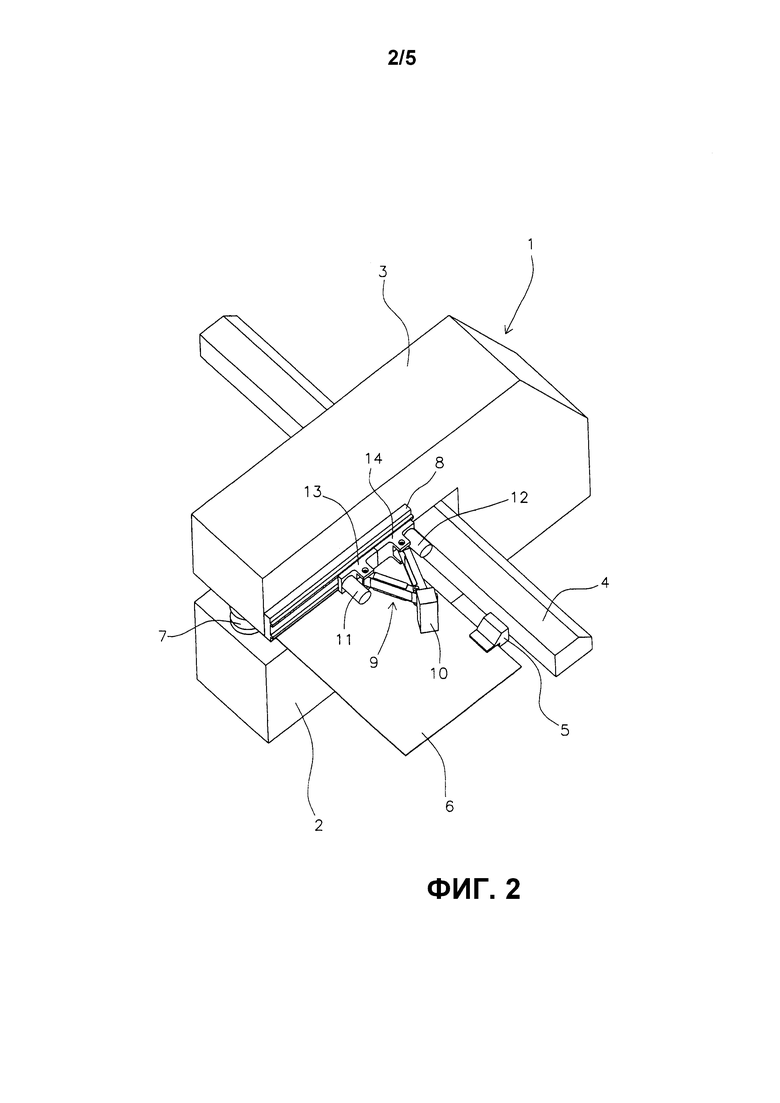
Фиг.2 показывает комбинированную машину в состоянии сдвинутого циркуля, расположенного в общей точке линейной направляющей.
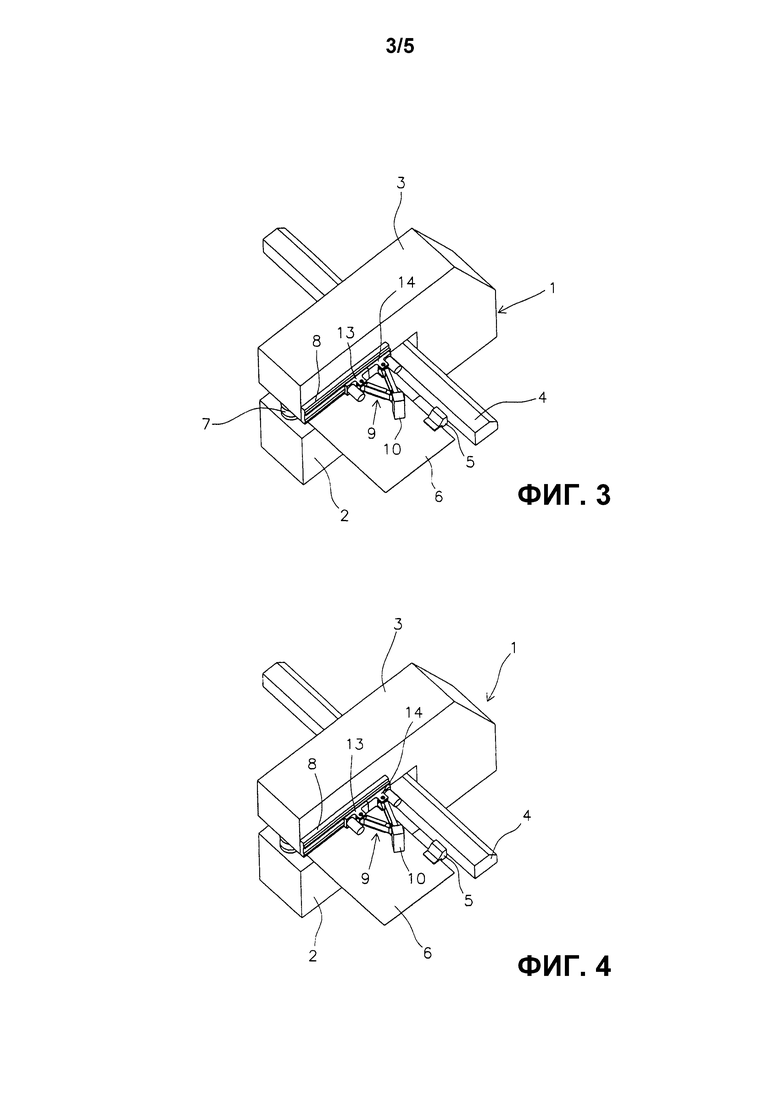
Фиг.3 показывает комбинированную машину с линейными двигателями в состоянии сдвинутого циркуля, расположенного в общей точке линейной направляющей.
Фиг.4 показывает комбинированную машину с приводом с винтовой передачей в состоянии сдвинутого циркуля, расположенного в общей точке линейной направляющей.
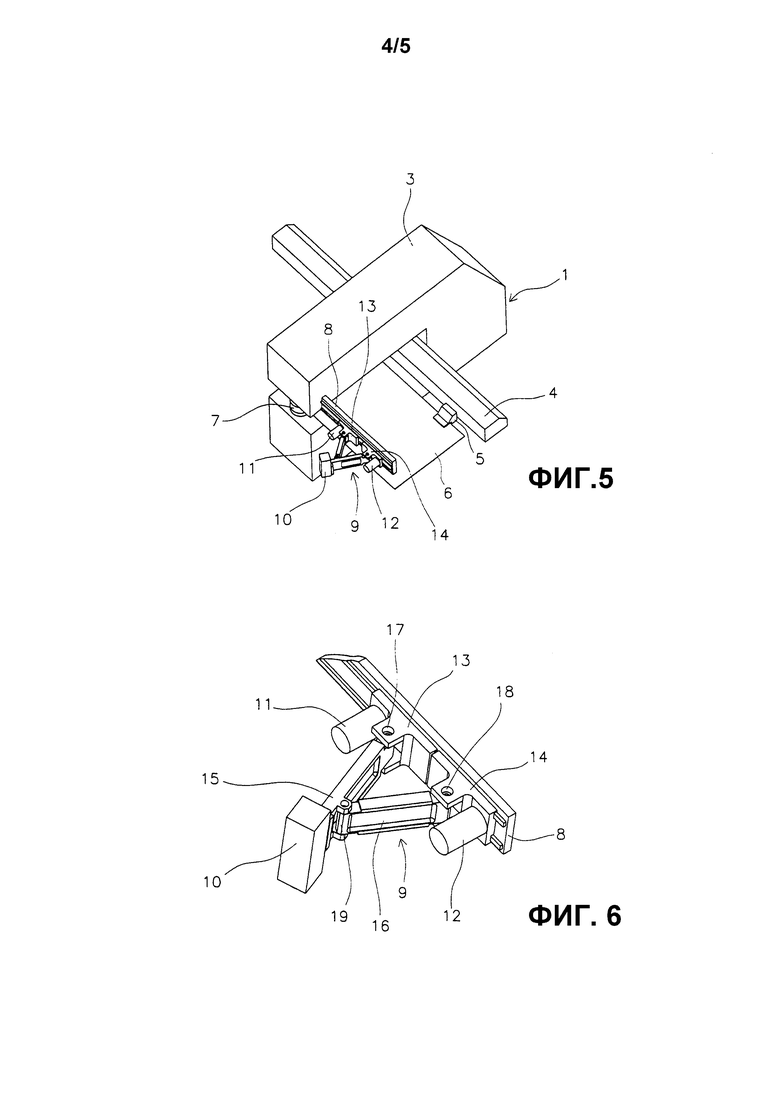
Фиг.5 показывает дополнительный вариант осуществления комбинированной машины в соответствии с настоящим изобретением.
Фиг.6 показывает конструкционный детальный чертеж примера структуры в виде циркуля для удерживания и перемещения лазерной режущей головки комбинированной машины в соответствии с настоящим изобретением.
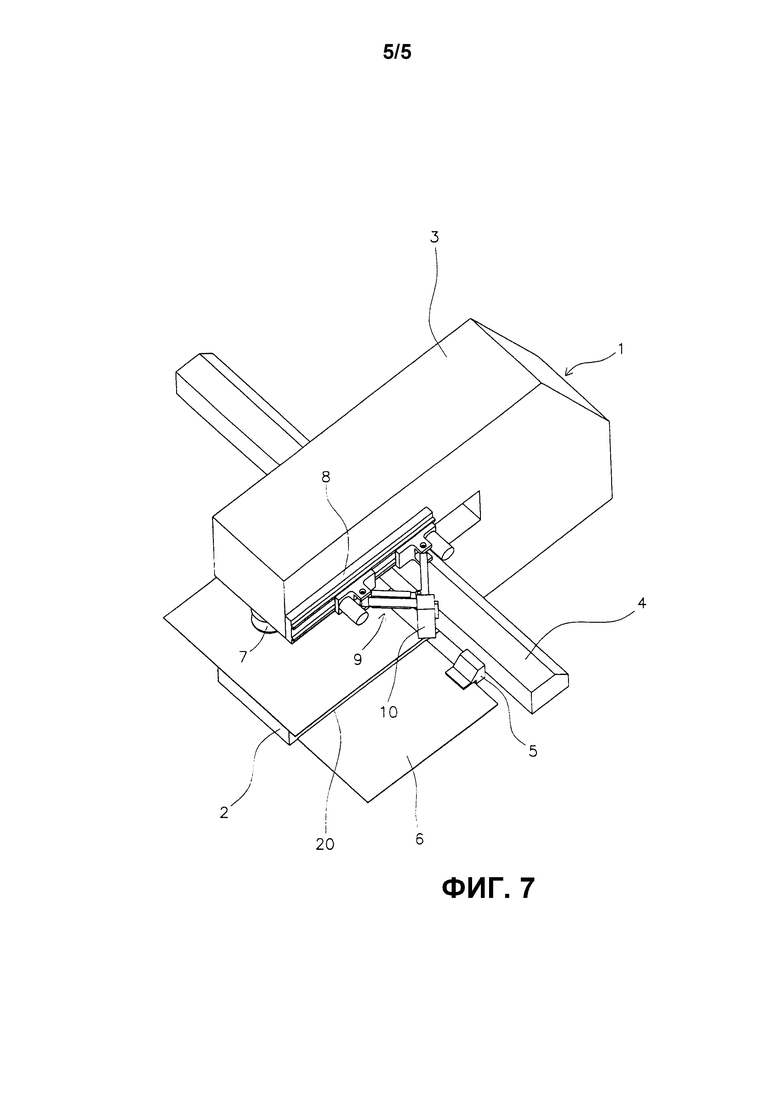
Фиг.7 показывает, что комбинированная машина в соответствии с настоящим изобретением, в частности комбинированная машина из фиг.1 и 2, способна выполнять полную сквозную резку металлического листа без пересечения друг с другом перемещения манипулятора и лазерной головки.
Комбинированная машина из фиг.1 и 2 содержит неподвижное основание 1, которое имеет нижнюю часть 2 и верхнюю часть 3. В показанном примере основание является по существу С-образным, но также может быть О-образным в виде закрытого портала.
Между двумя частями 2 и 3 вставлен манипулятор 4, который посредством захватов 5 удерживает плоский металлический лист 6, обеспечивая, таким образом, контролируемое перемещение вдоль двух осей Х и У декартовой системы координат.
Верхняя часть 3 удерживает неподвижную пробивную головку 7, которая обычным способом оборудована устройством для смены инструмента, и линейную направляющую 8 для конструкции 9 в виде циркуля, которая удерживает лазерную режущую головку 10, имеющую возможность полярно-линейного перемещения.
Полярно-линейное перемещение лазерной головки 10 обеспечивается двумя независимыми приводами, которые в случае фиг.1 и 2 состоят из двух двигателей вращения 11 и 12, которые перемещают две скользящие пяты 13 и 14 независимо и на изменяемые расстояния в противоположных направлениях вдоль линейной направляющей 8. Таким образом, лазерная головка 10 может перемещаться вдоль оси У и может поворачиваться вокруг вертикальной оси посредством открытия и закрытия конструкции в виде циркуля (фиг.1 и 2).
Альтернативно, приводы 11 и 12 могут состоять из линейных двигателей (фиг.3) или из приводов с винтовой передачей (фиг.4).
В качестве дополнительной альтернативы линейная направляющая 8 может быть расположена перпендикулярно к основанию 1 и параллельно манипулятору 4, как показано на фиг.5.
Конструкция 9 в виде циркуля лучше показана на фиг.6, на которой изображение содержит две шарнирные тяги 15 и 16, расположенные V-образно, которые имеют соответствующие концы, шарнирно закрепленные на соответствующих скользящих пятах 13 и 14 посредством пальцев 17 и 18 с осями, перпендикулярными плоскости металлического листа 6 и друг к другу посредством дополнительного пальца 19, также перпендикулярного плоскости металлического листа, расположенного вблизи от другого конца тяги 15, на котором закреплена лазерная режущая головка 10.
Все вместе, образованное линейной направляющей 8, скользящими пятами 13 и 14, приводами 11 и 12, и шарнирными тягами 15 и 16, позволяет осуществлять низко-инерционное перемещение лазерной головки 10 вдоль требуемого профиля резки, в то время как манипулятор 4 определяет перемещения металлического листа в направлениях ХУ относительно пробивной головки 7.
Как показано на фиг.7, которая относится к варианту осуществления из фиг.1 и 2, перемещение манипулятора 4 металлического листа и перемещение лазерной головки 10 обеспечиваются таким образом, чтобы они никогда не пересекали друг друга, чтобы позволить выполнение лазерной головкой сквозного разреза 20 от верха до низа металлического листа.
| название | год | авторы | номер документа |
|---|---|---|---|
| НИЗКОИНЕРЦИОННЫЙ МАНИПУЛЯТОР ДЛЯ СТАНКОВ ДЛЯ ЛАЗЕРНОЙ РЕЗКИ ПЛОСКОГО ЛИСТОВОГО МЕТАЛЛА | 2010 |
|
RU2546269C2 |
| СТАНОК ДЛЯ ОБРАБОТКИ ОБЪЕМНЫХ МЕТАЛЛИЧЕСКИХ ПРЕДМЕТОВ | 2015 |
|
RU2703665C2 |
| СПИРАЛЬНО-НАВИТЫЙ ВОЗДУХОВОД С МНОЖЕСТВОМ ОТВЕРСТИЙ, СООТВЕТСТВУЮЩИЙ СТАНОК ДЛЯ МАССОВОГО ПРОИЗВОДСТВА И СООТВЕТСТВУЮЩАЯ ПОЛОСА | 2019 |
|
RU2760021C1 |
| ПРОБИВНОЕ УСТРОЙСТВО | 2020 |
|
RU2791543C1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ВОЛОКОННЫМ ЛАЗЕРОМ ОБЪЕМНЫХ ДЕТАЛЕЙ | 2008 |
|
RU2386523C1 |
| ЛАЗЕРНАЯ РЕЖУЩАЯ ГОЛОВКА ДЛЯ СТАНКА | 2021 |
|
RU2799460C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПРОКЛАДОК | 2013 |
|
RU2533246C1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ, ПОВОРОТНО-ГИБОЧНЫЙ ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ КОРОБЧАТЫХ КОНСТРУКЦИЙ ИЗ СТАЛЬНЫХ ЛИСТОВ И МАНИПУЛЯТОР ЛИСТОВ К ГИБОЧНОМУ ПРЕССУ | 1993 |
|
RU2110349C1 |
| НЕПОДВИЖНЫЙ НОЖ, НАБОР НОЖЕЙ И БЫТОВОЙ ПРИБОР ДЛЯ СТРИЖКИ ВОЛОС | 2016 |
|
RU2714560C2 |
| Способ биомелиорации неиспользуемых деградированных земель с низкой несущей способностью при окультуривании почв для восстановления агропроизводства и устройство для его осуществления | 2022 |
|
RU2789864C1 |
Изобретение относится к комбинированной машине для пробивки и лазерной резки плоского металлического листа. Машина содержит неподвижное основание (1), неподвижную пробивную головку (7), лазерную режущую головку (10) и манипулятор (4) для перемещения металлического листа (6) в плоскости (ХУ) декартовой системы координат. Лазерная режущая головка (10) удерживается конструкцией (9) в виде циркуля с изменяемой апертурой, которая имеет возможность перемещения вдоль линейной направляющей (8). 4 з.п. ф-лы, 7 ил.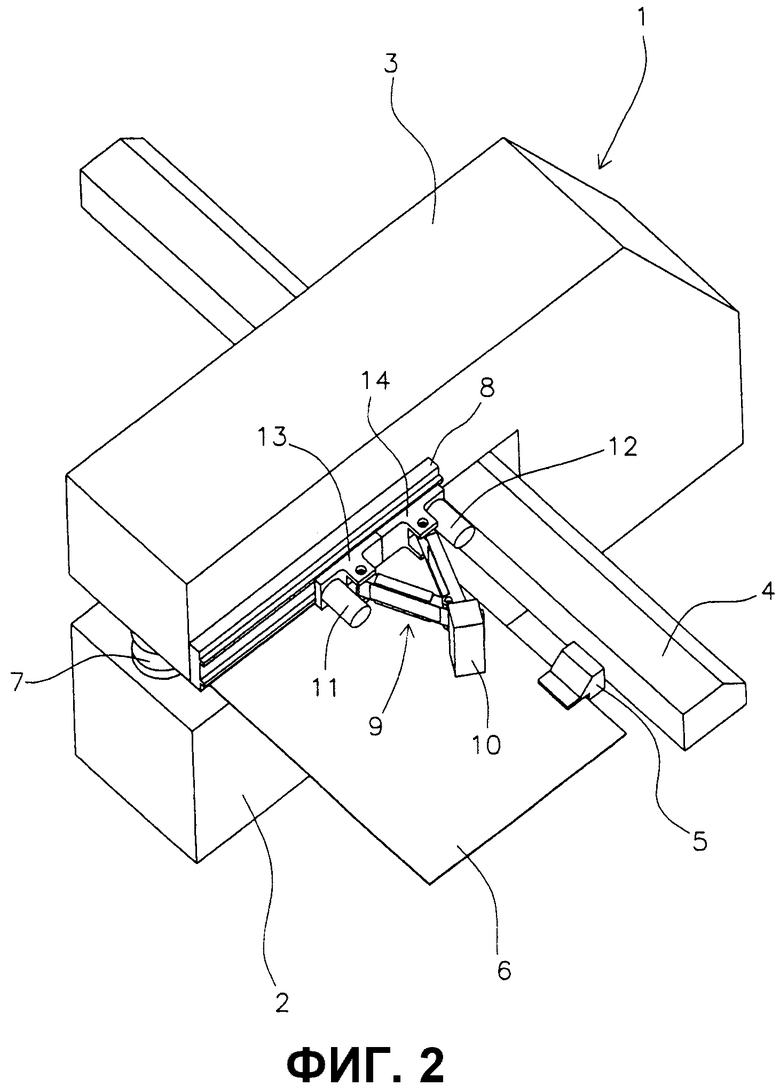
1. Комбинированная машина для пробивки и лазерной резки плоского металлического листа, содержащая неподвижное основание (1), неподвижную пробивную головку (7), подвижную лазерную режущую головку (10), линейную направляющую (8), прикрепленную к основанию (1), и манипулятор (4) для перемещения металлического листа (6) в плоскости (ХУ) декартовой системы координат, отличающаяся тем, что она снабжена средством для обеспечения полярно-линейного перемещения лазерной головки, выполненным в виде циркуля с двумя независимыми приводами (11, 12) и содержащим две скользящие пяты (13, 14), приводимые в движение двумя соответствующими независимыми приводами (11, 12) для перемещения вдоль упомянутой линейной направляющей (8), и две шарнирные тяги (15, 16), образующие между собой V-образную конфигурацию и шарнирно соединяющие упомянутые пяты (13, 14) с упомянутой лазерной режущей головкой (10), причем первая тяга (15) имеет первый конец, шарнирно соединенный с первой скользящей пятой (13), имеющий возможность вращения вокруг первой оси (17), перпендикулярной плоскости металлического листа, и второй конец, прикрепленный к упомянутой лазерной головке (10), причем вторая тяга (16) имеет первый конец, шарнирно соединенный со второй скользящей пятой (14), имеющий возможность вращения вокруг второй оси (18), перпендикулярной плоскости металлического листа, и второй конец, шарнирно соединенный с упомянутым вторым концом первой тяги (15), имеющий возможность вращения вокруг третьей оси (19), перпендикулярной плоскости металлического листа.
2. Машина по п. 1, отличающаяся тем, что упомянутые приводы (11, 12) являются двигателями вращения.
3. Машина по п. 1, отличающаяся тем, что упомянутые приводы (11, 12) являются линейными двигателями.
4. Машина по п. 1, отличающаяся тем, что упомянутые приводы (11, 12) являются приводами с винтовой передачей.
5. Машина по п. 1, отличающаяся тем, что манипулятор (4) и лазерная режущая головка (10) установлены с предотвращением их пересечения друг с другом при перемещении лазерной головки для обеспечения полной сквозной резки металлического листа.
| EP0491747A1,01.07.1992 SU119778A, 01.01.1959 SU507420A1, 25.03.1976 SU586977А, 06.01.1978 US2008197118A1,21.08.2008 CN2030126U,04.01.1989. |

