Настоящее изобретение относится к низкоинерционному манипулятору для станков для лазерной резки плоского листового металла.
Наиболее распространенной моделью станка для лазерной резки плоского листового металла является станок с подвижной оптикой и фиксированной заготовкой. В станке такой модели лист, который подвергают обработке, размещают на плоскости, в то время как режущий инструмент (фокусирующая головка) движется по осям X-Y движения, перпендикулярным друг другу и параллельным плоскости листа, с помощью исполнительного устройства с ЧПУ. Обычно первая ось (Х) имеет наибольшую длину хода и выполнена с порталом, лежащим на двух параллельных направляющих или на одной направляющей с кронштейном. Вторую перпендикулярную ось (Y) обычно устанавливают на первую. Общая масса оборудования, движущегося вдоль двух осей в соответствии с конструкцией, является довольно значительной несмотря на согласование с задачей.
Вырезание лазером плоских профилей обычно содержит множество небольших волновых движений, которые при выполнении с достаточной точностью требуют ограниченной динамичности, отражающейся в снижении производительности станка. Динамичность (максимальные ускорения) ограничивается действующими в технологическим процессе массами. Структура с центральной балкой, применяемая как среднее между решениями с порталом и с кронштейном, также сталкивается с этой проблемой. Другими словами, массы в системе с осями X-Y координат и ускорения, требующиеся для вырезания контуров с небольшими радиусами кривизны при скорости обработки, мешают существующей тенденции. Отмечаем, что ускорение при изгибании равно v2/r, где «v» является конкретной скоростью обработки при резании лазером, и «r» является радиусом кривизны вырезаемого профиля. При небольшом значении «r» ускорение увеличивается и скорость обработки «v» должна быть уменьшена для получения качественной обработки.
Первое решение, направленное на преодоление описанного выше ограничения, было достигнуто путем добавления второй системы вспомогательных осей координат xy с уменьшением масс и длины хода, установленной на первой системе основных осей XY (патент US 2004/0025761). В ходе рабочего цикла выполняют несколько движений с большим шагом по основным осям XY и много местных движений с коротким шагом и высокой динамичностью выполняют по паре вспомогательных осей xy координат (решение XY+xy).
Альтернативное решение было затем разработано и описано в ЕР1366846 с использованием одной дополнительной линейной вспомогательной оси х, установленной на поперечной оси Y, которая в свою очередь помещена на главном портале Х. Подавляющая часть массы приходится на долю главного портала Х, в то время как небольшая масса приходится на долю поперечной оси Y и вспомогательной оси х. Ось главного портала Х выполняет широкие редкие перемещения, в то время как местные частые перемещения с высокой динамичностью выполняются парой осей Yx (решение X+Yx).
Другое альтернативное решение представлено в US 2008/0197118 и заменяет дополнительную систему координат xy с низкой инерцией полярным механизмом позиционирования ρϑ, управляемым двумя моторизованными ползунами регулируемой длины, идущими в направлении режущей головки от общей механизированной каретки, которая может скользить вдоль оси Y. Ось главного портала Х выполняет широкие редкие перемещения, в то время как местные частые перемещения с высокой динамичностью выполняются комбинацией из трех осей Yρϑ (решение X+Yρϑ).
Целью настоящего изобретения является предложение другого альтернативного решения, которое смешивает между собой два упомянутых выше решения и позволяет улучшить рабочие характеристики станка, обеспечив при этом качество резания заготовки.
Согласно настоящему изобретению указанной цели достигают с помощью манипулятора для станка для лазерной резки плоского листового металла, содержащего ось Х продольного перемещения и ось Y поперечного перемещения, перпендикулярную указанной продольной оси и параллельную плоскости листового металла, и опорное приспособление для лазерной режущей головки, которая может перемещаться вдоль указанных осей, отличающегося тем, что указанное опорное приспособление содержит два скользящие блока, которые приводятся в действие соответствующими независимыми исполнительными устройствами для перемещения вдоль оси Y на переменном взаимном расстоянии, и стержни для шарнирного соединения указанных скользящих блоков с указанной лазерной режущей головкой.
Первое исполнительное устройство обеспечивает поперечную подвижность вдоль оси Y, а второе исполнительное устройство взаимодействует с первым устройством и со стержнями шарнирного соединения для добавления угловой подвижности ϑ, имеющей постоянный радиус, лазерной режущей головке; сочетание двух движений обеспечивает требующееся локальное покрытие декартовой системы координат. Ось главного портала Х выполняет широкие редкие перемещения, в то время как местные частые перемещения с высокой динамичностью выполняются в паре осей Yϑ (решение Х+Yϑ).
Преимущество, которое дает настоящее изобретение, заключается в улучшении рабочих характеристик станка при гарантии качества резания заготовки с локальной низкоинерционной системой перемещения, в которой используются только два локальных исполнительных устройств вместо трех, применяемых в решениях US 2004/0025761 и US 2008/0197118. Решение ЕР 1366846, с двумя исполнительными устройствами, отличается в свою очередь от настоящего изобретения низкоинерционными режимами позиционирования, управляемыми в виде сочетания линейных и полярных движений.
Низкоинерционные исполнительные устройства могут быть независимо выполнены с любой известной механизацией, например в виде ходового винта с циркулирующими шариками, зубчато-реечной передачи или ползунов с линейными двигателями.
Признаки настоящего изобретения станут более очевидными из следующего подробного описания лазерного режущего станка с низкоинерционным манипулятором, показанного в форме не ограничивающего пределы изобретения примера на прилагаемых чертежах, на которых:
на фиг.1 показан пример станка для лазерной резки с двумя координатами измерения, в котором используется манипулятор с осями X+Yϑ согласно настоящему изобретению;
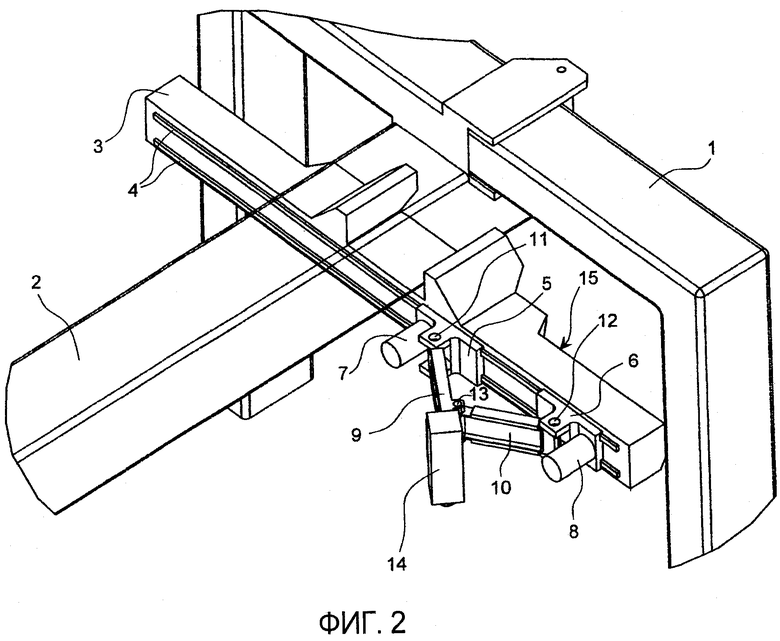
на фиг.2 показан в увеличенном масштабе детально манипулятор с двумя скользящими блоками лазерной режущей головки в положении максимального взаимного расстояния на одном конце оси Y;
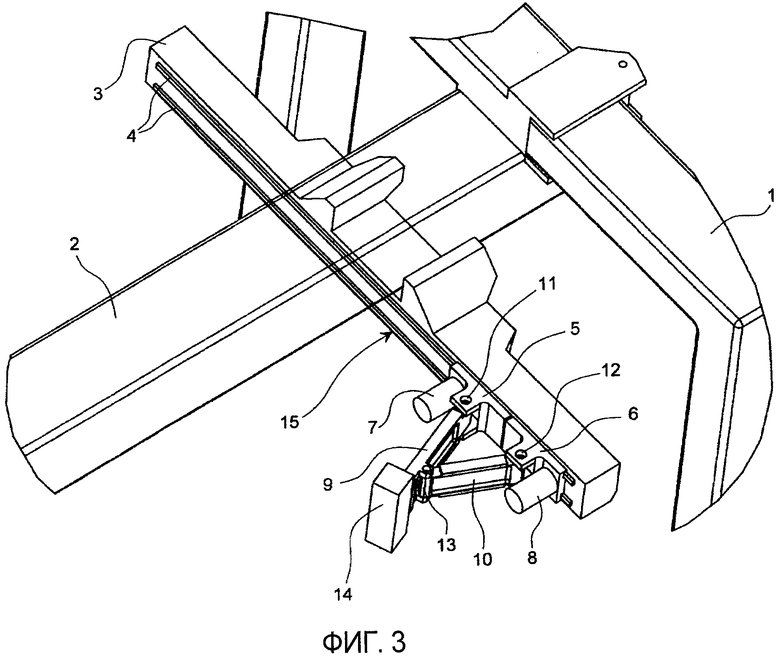
на фиг.3 показан в увеличенном масштабе детально манипулятор в положении минимального взаимного расстояния на том же конце оси Y;
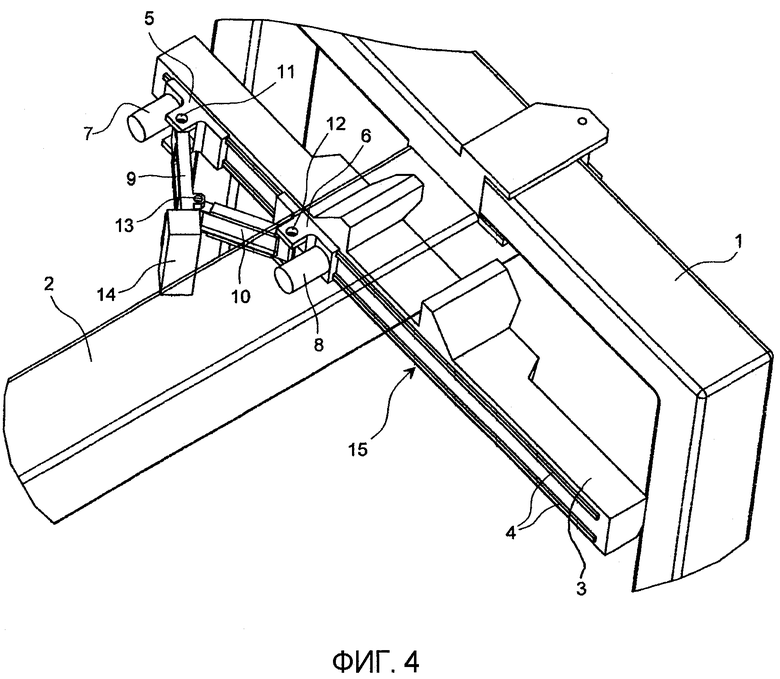
на фиг.4 показан в увеличенном масштабе детально манипулятор в положении минимального взаимного расстояния на другом конце оси Y;
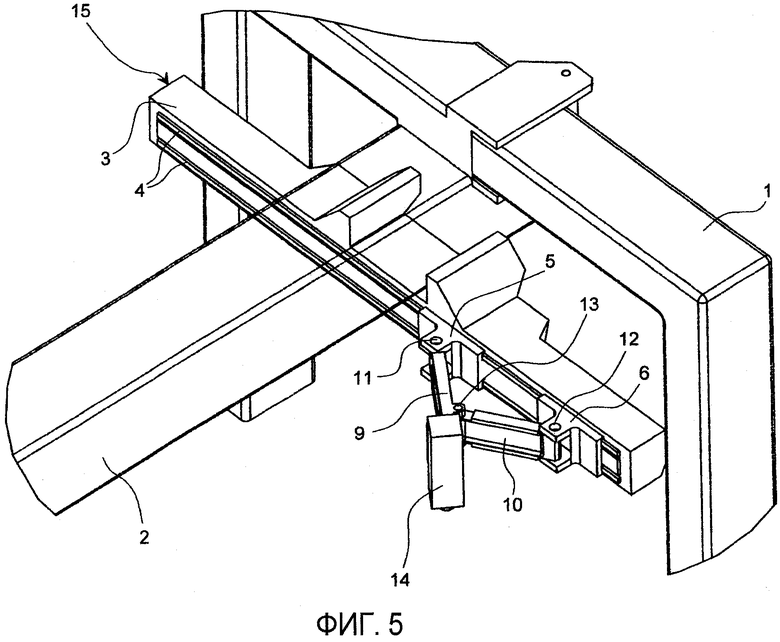
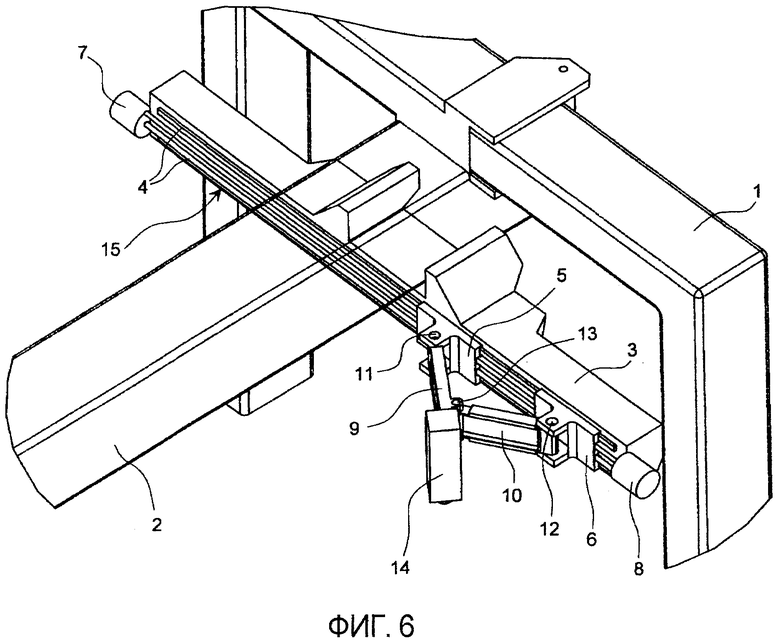
на фиг.5 и 6 в положении с фиг.2 показаны соответствующие варианты манипулятора с исполнительными устройствами иного типа;
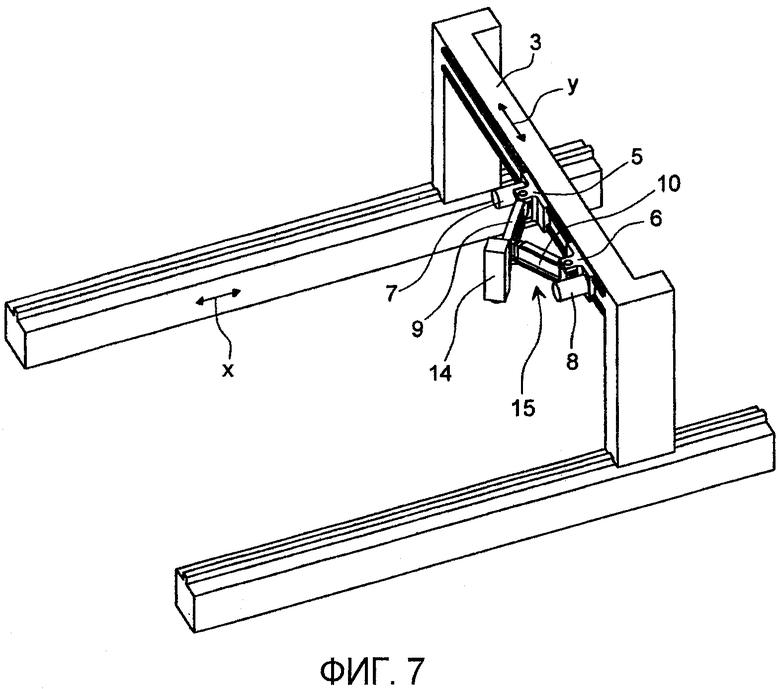
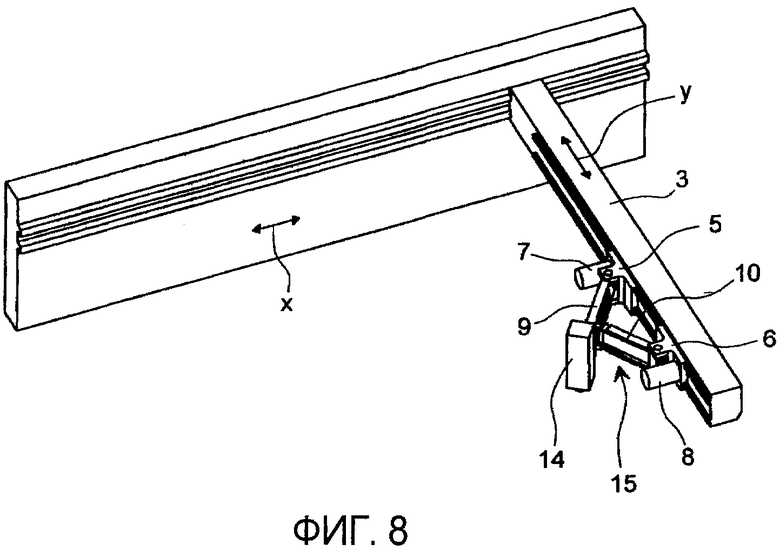
на фиг.7 и 8 показаны другие примеры станков с использованием манипулятора согласно настоящему изобретению.
На фиг.1 показан лазерный режущий станок, относящийся к типу с концевыми порталами 1 и центральной продольной балкой 2, соединяющей два портала.
С другой стороны, возможно применение конструкции с подвижным порталом (фиг.7) или кронштейном (фиг.8).
В примере, показанном на фиг.1, центральная балка 2 (ось Х) поддерживает поперечную балку 3, которая может скользить вдоль балки 2 под воздействием основного исполнительного устройства (не показан). Исполнительное устройство может относиться к любому типу, имея ползун с линейным двигателем, зубчато-реечную передачу или ходовой винт с циркулирующими шариками.
Вдоль поперечной балки 3, которая описывает ось Y, параллельную плоскости листа (не показан), могут скользить два скользящих блока 5 и 6 при меняющемся взаимном расстоянии вдоль направляющих 4, причем скользящие блоки перемещаются соответствующими независимыми исполнительными устройствами 7 и 8, которые могут относиться к зубчато-реечной передаче (фиг.2-4) или могут иметь ползун с линейными двигателями (фиг.5, где двигатели не показаны, для того чтобы упростить чертеж), или же вновь относиться к ходовому винту с циркулирующими шариками (фиг.6).
Шарнирная система с двумя стержнями 9 и 10 размещается в форме буквы V, имеющей соответствующие концы, шарнирно соединенные с соответствующими скользящими блоками 5 и 6 штырями 11 и 12, оси которых перпендикулярны плоскости листового металла, и соединенные между собой дополнительным штырем 13, также с осью, перпендикулярной плоскости листового металла, размещенным возле другого конца стержня 9, поддерживает лазерную режущую головку (фокусирующую головку) 14, которая прикреплена как одно целое к указанному второму концу стержня 9. Головка 14 выполняет резание листового металла, помещенного на горизонтальной плоскости под продольной балкой 2 и поперечной балкой 3.
Узел, состоящий из поперечной балки 3, скользящих блоков 5 и 6, исполнительных устройств 7 и 8 и шарнирно соединенных стержней 9 и 10, является движущим оборудованием 15, которое определяет нужные перемещения лазерной режущей головки 14 вдоль требующегося профиля резания.
Редкие перемещения по ширине выполняются вдоль оси Х, описанной продольной балкой 2, а локальные частые перемещения выполняются вдоль осей Yϑ, описанных перемещениями скользящих блоков 5 и 6 вдоль поперечной балки Y и на практике взаимным сближением и расхождением между собой за счет различного перемещения, приданного независимыми исполнительными устройствами 7 и 8 самим скользящим блокам. Первый из них создает поперечную подвижность, в то время как второй добавляет угловую подвижность с постоянным радиусом. Сочетание двух перемещений обеспечивает требующееся локальное покрытие координат.
Вспомогательная система, состоящая из скользящих блоков 5 и 6, исполнительных устройств 7 и 8 и шарнирно соединенных стержней 9 и 10, является низкоинерционным движущим оборудованием, позволяющим с высокой динамичностью выполнять высокоточные разрезы, улучшая, таким образом, рабочие характеристики станка и гарантируя высокое качество резания листового металла.
Изобретение относится к низкоинерционному манипулятору для лазерной резки плоского листового материала. Манипулятор содержит опорное приспособление (15) для лазерной режущей головки (14), выполненной с возможностью продольного перемещения вдоль оси X и поперечного перемещения вдоль оси Y. Опорное приспособление снабжено двумя скользящими блоками (5, 6), которые приводятся в действие соответствующими независимыми исполнительными устройствами (7, 8) для их перемещения вдоль оси Y с возможностью изменения их взаимного расстояния, и стержнями (9, 10) для шарнирного соединения указанных скользящих блоков (5, 6) с лазерной режущей головкой (14). Изобретение позволяет повысить качество резания заготовок. 3 з.п. ф-лы, 8 ил.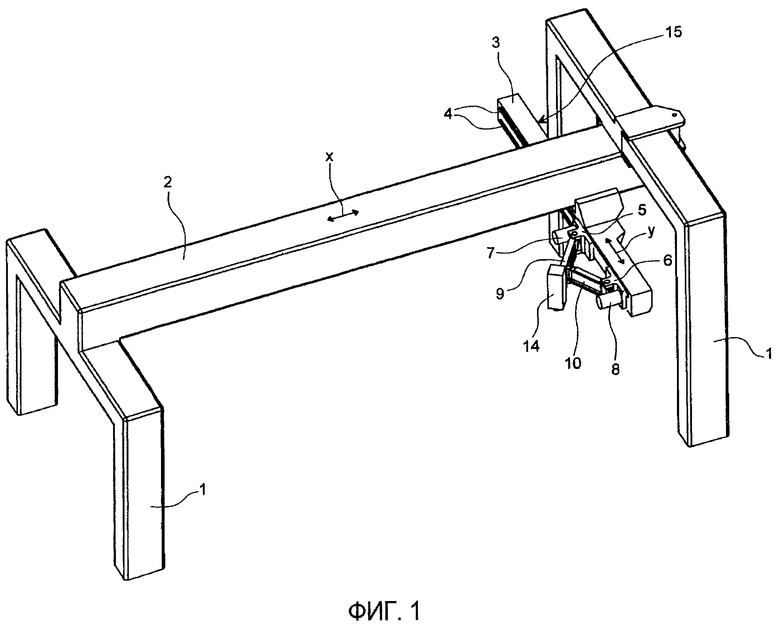
1. Низкоинерционный манипулятор станка для лазерной резки плоского листового металла, содержащий опорное приспособление (15) для лазерной режущей головки (14), выполненной с возможностью продольного перемещения вдоль оси X и поперечного перемещения вдоль оси Y, перпендикулярной оси X и параллельной плоскости перемещения лазерной режущей головки, отличающийся тем, что опорное приспособление (15) снабжено двумя скользящими блоками (5, 6) с соответствующими независимыми исполнительными устройствами (7, 8) для перемещения упомянутых блоков вдоль оси Y с возможностью изменения расстояния между ними, и двумя стержнями (9, 10), образующими между собой V-образную конфигурацию и шарнирно соединенными со скользящими блоками (5, 6) и с лазерной режущей головкой (14), причем первый стержень (9) одним концом шарнирно установлен на первом скользящем блоке (5) с возможностью поворота вокруг первой оси (11), перпендикулярной плоскости перемещения лазерной режущей головки (14), а вторым концом соединен за одно целое с упомянутой головкой (14), при этом второй стержень (10) одним концом шарнирно установлен на втором скользящем блоке (6) с возможностью поворота вокруг второй оси (12), перпендикулярной плоскости перемещения лазерной режущей головки (14), а вторым концом шарнирно соединен со вторым концом первого стержня (9) с возможностью поворота вокруг третьей оси (13), перпендикулярной плоскости перемещения лазерной режущей головки (14).
2. Манипулятор по п.1, отличающийся тем, что исполнительные устройства (7, 8) выполнены с линейным двигателем.
3. Манипулятор по п.1, отличающийся тем, что исполнительные устройства (7, 8) выполнены с зубчато-реечной передачей.
4. Манипулятор по п.1, отличающийся тем, что исполнительные устройства (7, 8) выполнены с винтовой передачей.

