Изобретение относится к способам и устройствам виброизоляции и может быть использовано для проектирования оборудования и совершенствования эргономики рабочих мест пилотов, других членов экипажей, а также пассажиров вертолетов различного назначения.
Известно, что в полете вертолет вибрирует в широком диапазоне низких и средних частот ƒ=10÷100 Гц, особенно интенсивно в диапазоне инфрачастот ƒ≥1÷10 Гц, наиболее вредных с точки зрения безопасной и эффективной работы экипажа, а также комфорта пассажиров. Известно, что дозы вредного воздействия таких вибраций становятся опасными для здоровья и жизнедеятельности человека с увеличением продолжительности полета. Также известно, что виброизоляция в диапазоне инфранизких частот является наиболее труднорешаемой технической задачей для данного вида летательных аппаратов. Более того, неизвестны технические решения для виброизоляции на критических инфрачастотах, близких к нулевым значениям ƒ<1 Гц, вызываемых например траекторными колебаниями вертолета.
Известен способ виброизоляции пилотов вертолетов [Р.Г. Камило, М.Т. Джонатан. Устройство для уменьшения вибрации кресла пилота вертолета. / Патент РФ 2504487, опубл. 20.01.2014, бюл. №2]. Способ заключается во введении в систему виброизоляции пилота подвески кресла, снабженной направляющим механизмом, структурные элементы которого образуют кинематическую цепь для обеспечения движения системы в заданном направлении, а также упругим элементом в виде аэропружины для снижения уровня вибраций. Способ дает некоторый положительный эффект на частотах ƒ≥7÷8 Гц, причем качественную виброизоляцию, начиная с частот ƒ≥12÷16 Гц. Однако данный способ неэффективен в большей части диапазона инфрачастот, не говоря о частотах, близких к нулевым значениям. Основные причины: (а) высокая жесткость упругого элемента; (б) низкая добротность кинематической цепи, что исключает качественную виброизоляцию на инфрачастотах; (в) громоздкость и значительный вес подвески, что не позволяет реализовать способ в стесненном рабочем пространстве кабин многих моделей вертолетов. Поэтому способ реализован лишь в ряде учебных вертолетов, кабины которых специально для этого переоборудованы.
Известен также способ виброизоляции пилота вертолета [P. Safarpour, М. Pourgholi, М. Khazaee, A nonlinear seat suspension with high-static low-dynamic stiffness based on negative stiffness structure for helicopter. Journal of Vibration and Control 28 (2021), doi.org/10.1177/10775463211022482]. Способ заключается в применении интегрированной модели системы виброизоляции «подвеска - подушка кресла», при этом подвеску снабжают направляющим механизмом, структурные элементы которого образуют кинематическую цепь для реализации движения системы в заданном направлении, и несущим упругим элементом в виде механической (металлической) пружины, а также дополнительным упругим элементом с отрицательной жесткостью, для снижения уровня вибраций в исследуемом диапазоне частот. Данный способ дает определенный эффект в некоторой полосе инфранизких частот. Согласно авторам, результаты стендовых испытаний такой модели показали снижение суммарной амплитуды виброускорений (временная характеристика) в 1,45÷1,48 раза, в сравнении с входной (имитируемой стендом) вибрацией. При этом, на основной частоте ƒ≈5 Гц снижение вибраций достигало 1,8÷1,93 раза. Также известно, что подушки из известных эластичных натуральных и/или искусственных материалов, применяемые в креслах пилотов, могут снижать вибрации на некоторых низких и средних частотах. Однако на большей части низкочастотного диапазона и всем диапазоне инфрачастот, подушки пропускают «напрямую» или усиливают вибрации.
Наиболее близким по технической результату к предлагаемому способу, является способ виброизоляции пилота вертолета [Говердовский В.Н., Ли Ч.-М., Патент РФ 2597042, опубл. 10.09.2016, бюл. №25], согласно которому в систему виброизоляции кресла пилота вводят подвеску, снабженную упругим элементом положительной жесткости, дополнительным упругим элементом знакопеременной жесткости, который выполняют в виде взаимозаменяемых пакетов из тонких пластинчатых металлических пружин и присоединяют к системе, для работы в параллель с упругим элементом, с помощью направляющего механизма, структурные элементы которого образуют кинематическую цепь для преобразования отрицательной крутильной жесткости дополнительного упругого элемента в жесткость в направлении движения системы, далее минимизируют суммарную жесткостью обоих упругих элементов на некотором интервале относительных перемещений структурных элементов, определяемом условиями работы системы.
Данный способ с помощью подвески кресла позволяет значительно повысить качество виброизоляции пилотов и пассажиров в ряде дискретных полос инфрачастотного диапазона ƒ≥1÷10 Гц. Результаты получены в ходе многоэтапных стендовых испытаний различных вариантов подвески, а также летных испытаний в кабинах пилотов и других отсеках серийных вертолетов различного назначения разработки КБ им. Миля.
Вместе с тем, в процессах сборки и настройки дополнительного упругого элемента данного типа не представлялось возможным достичь отрицательной жесткости на интервале значений, оптимальных для минимизации суммарной жесткости обоих упругих элементов в относительном движении структурных элементов направляющего механизма подвески. Кроме того, недостаточная механическая добротность направляющего механизма не позволила достичь необходимого качества виброизоляции на большей части инфрачастот ƒ≥1÷10 Гц, генерируемых в процессе работы силовой установки и трансмиссии, а также траекторных колебаний вертолета, не говоря о критических частотах, близких к нулевым значениям ƒ<1 Гц. Такие вибрации, например, хвостовой балки могут появляться вследствие несоразмерных управляющих действий, ошибок работы автопилота, вызывающих неустойчивые траекторные колебания вертолета, стрессовые состояния пилотов, и, как следствие, нештатные и аварийные ситуации. Причины:
(1) Ограниченные возможности разработанных ранее и примененных способов сборки и настройки дополнительного упругого элемента в виде взаимозаменяемых пакетов тонких пластин из пружинных сталей.
(2) Невозможность, вследствие физических закономерностей, снижения трения в подвижных соединениях структурных элементов направляющего механизма ниже D≤0,08÷0,09 (коэффициент относительного демпфирования), что крайне много для преодоления порога демпфирования и, соответственно, качественной виброизоляции в полосе критических инфрачастот ƒ≈1÷2 Гц, не говоря о виброизоляции вблизи почти нулевых значений f<1 Гц.
(3) Габариты направляющего, а также опционных механизмов подвески усложняли ее настройку под особенности антропометрии сменных пилотов, а изготовленные из сталей детали механизмов имели повышенный вес.
Известна подвеска [Р.Г. Камило, М.Т. Джонатан. Устройство для уменьшения вибрации кресла пилота вертолета. / Патент РФ 2504487, опубл. 20.01.2014, бюл. №2] для реализации известного способа, установленная под креслом пилота и содержащая направляющий механизм, упругий элемент и устройство управления параметрами упругого элемента. Данная подвеска неэффективна в большей части диапазона инфранизких частот, наиболее вредных и опасных для работы пилотов, а также обеспечения комфорта пассажиров, не говоря уже о невозможности виброизоляции с ее помощью на критических, близких к нулевым значениям частотах. Основные причины неэффективности: (а) высокая жесткость упругого элемента в направлении движения системы, (б) низкая механическая добротность направляющего механизма, (в) значительные габариты и вес.
Наиболее близкой к заявляемой является подвеска [Говердовский В.Н., Ли Ч.-М., Патент РФ 2597042, опубл. 10.09.2016, бюл. №25], содержащая упругий элемент, дополнительный упругий элемент знакопеременной жесткости и направляющий механизм, структурные элементы которого образуют кинематическую цепь для преобразования вида движения и обеспечения работы дополнительного упругого элемента в параллель с упругим элементом в заданном направлении движения подвески, и устройство регулирования и минимизации суммарной жесткости обоих упругих элементов в пределах рабочего хода подвески, протяженность которого определяется условиями работы системы виброизоляции пилота.
Данная подвеска имеет ограниченное качество виброизоляции в диапазоне инфрачастот ƒ≥1÷10 Гц и не обеспечивает виброизоляцию на частотах ƒ<1 Гц. Причины: (а) кинематическая структура и возможности настройки параметров дополнительного упругого элемента не обеспечивают требуемого минимума суммарной жесткости обоих упругих элементов, (б) недостаточная механическая добротность направляющего механизма не позволяет преодолеть порог демпфирования для виброизоляции на частотах ƒ<1 Гц; (б) направляющий и опционные механизмы настройки подвески под особенности антропометрии сменных пилотов имеют значительные габариты и вес.
Задача изобретения (технический результат): расширение частотного диапазона и повышение качества пространственной виброизоляции, включая почти нулевые частоты, повышение компактности и снижение веса подвески и системы виброизоляции кресла в целом.
Поставленную задачу решают с помощью способа, согласно которому в систему виброизоляции кресла пилота вводят подвеску, снабженную упругим элементом, дополнительным упругим элементом знакопеременной жесткости и направляющим механизмом, структурные элементы которого образуют кинематическую цепь для минимизации суммарной жесткости обоих упругих элементов и обеспечения движения системы в направлении минимальной жесткости, при этом дополнительный упругий элемент выполняют в виде пространственно нагруженных композитных метаструктур с «памятью» формы, которые собирают в пакеты и присоединяют к подвеске в количестве и по структурно-функциональным схемам согласно общей компоновки, требованиям к рабочему ходу и полезной нагрузке подвески, а также прочности дополнительного упругого элемента при вибрационном движении, а направляющий механизм выполняют с короткой кинематической цепью структурных элементов, подвижные соединения которых обеспечивают механическую добротность системы для преодоления порога демпфирования при движении на инфрачастотах, далее осуществляют параметрическое и позиционное и управление подвеской для обеспечения несущей способности и устойчивого движения системы на инфрачастотах, включая движение вблизи почти нулевых частот. Кроме того, дополнительный упругий элемент выполняют в виде многослойных метаструктур на основе полимерных композитов с варьируемыми геометрическими и механическими характеристиками, состоящих из несущих, например, углеволоконных слоев, и промежуточных мягких слоев, например, на основе высокомолекулярных полимеров с наполнителями из полидисперсной фазы, для создания эффекта "плавающего" связующего. Такое выполнение дополнительного упругого элемента обеспечивает возможность нагружения до закритического состояния при больших угловых и линейных перемещений, сохраняя его упругость и длительную прочность. Повышение механической добротности позволяет преодолеть критический порог демпфирования и, таким образом, повысить качество и расширить диапазон инфрачастотной виброизоляции, включая почти нулевые значения частот. Выполнение дополнительного упругого элемента в виде пакета многослойных метаструктур из несущих и мягких слоев на основе полимеров, а направляющего механизма с короткой кинематической цепью позволяет также повысить компактность и существенно снизить вес подвески и системы виброизоляции в целом, размещаемой в стесненном пространстве кабин и других отсеков вертолетов различных моделей. Научные аспекты моделирования и анализа процессов деформирования, повреждения и деградации свойств полимерных композитов с «памятью» формы разработаны авторами (см., например, [B.D. Annin, E.V. Karpov, A.Y. Larichkin, Influence of anisotropy on the deformation of a polymer composite with shape memory. Mechanics of Solids 55 (2020) 761-766]).
Технический результат достигается также тем, что подвеска содержит упругий и дополнительный упругие элементы знакопеременной жесткости, а также направляющий механизм, структурные элементы которого образуют кинематическую цепь для обеспечения движения подвески в направлении минимальной суммарной жесткости обоих упругих элементов, при этом дополнительный упругий элемент выполнен в виде пространственно нагруженных композитных метаструктур с «памятью» формы, собранных в пакеты в количестве и по структурно-функциональным схемам, определяемым требованиями к рабочему ходу и полезной нагрузке подвески, а также прочности дополнительного упругого элемента при вибрационном движении, а направляющий механизм выполнен с короткой кинематической цепью структурных элементов, подвижные соединения которых снабжены сменными вставками из антифрикционного композита для преодоления порога демпфирования при движении на инфрачастотах, включая движение вблизи почти нулевых частот. Кроме того, упругий элемент выполнен в виде бесштоковой аэропружины с обтекателями, форма которых выполнена так, чтобы обеспечить данному элементу знакопеременную жесткость в заданном диапазоне значений в плоскости, ортогональной направлению рабочего хода подвески. Такой упругий элемент позволяет осуществлять настройку подвески в соответствии с особенностями антропометрических характеристик сменных пилотов, увеличить диапазон регулирования статической (полезной) нагрузки кресла, повысить качество пространственной виброизоляции.
Сущность изобретения поясняется с помощью иллюстраций, где показаны:
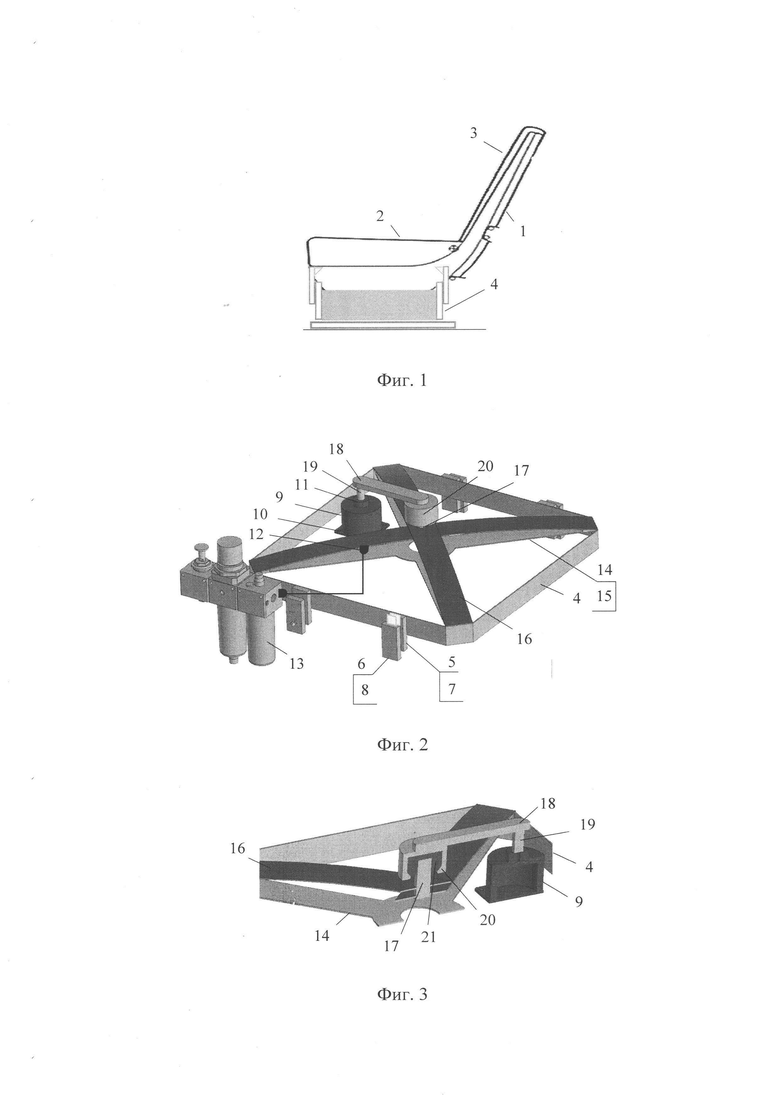
Фиг. 1. Схема общей компоновки кресла пилота.
Фиг. 2. Общая компоновка подвески кресла.
Фиг. 3. Одно из сечений конструкции подвески.
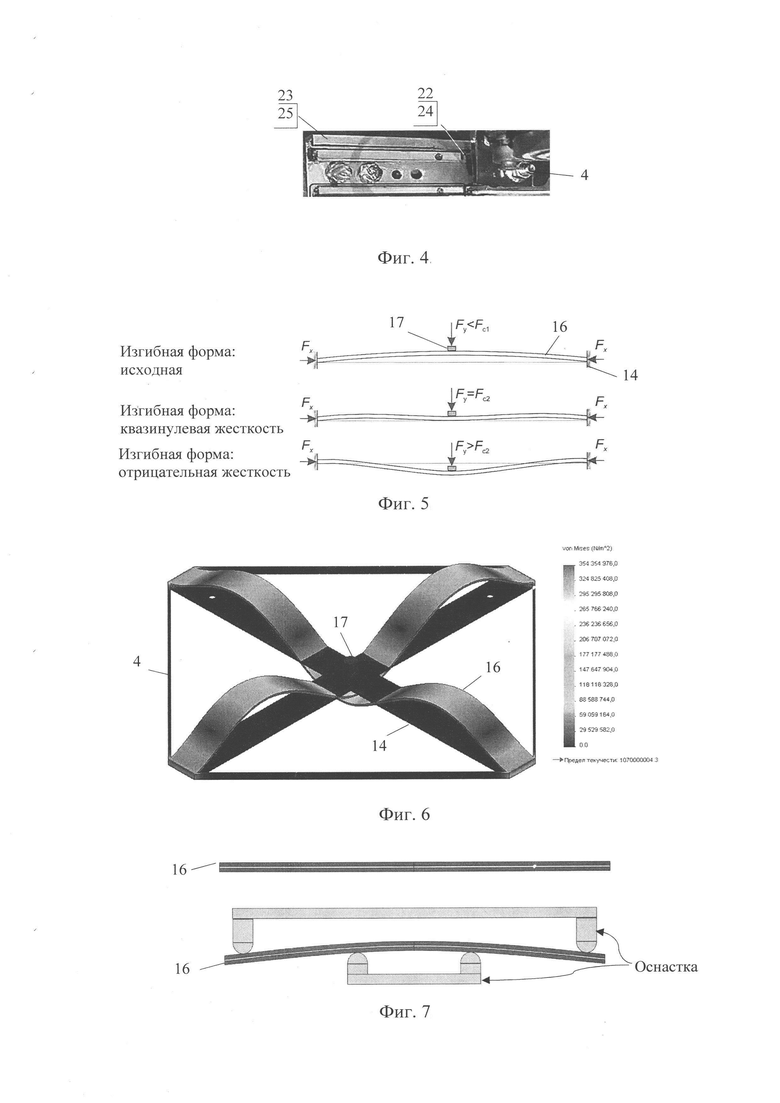
Фиг. 4. Механизм перемещения кресла в горизонтальном (продольном) направлении (пример выполнения).
Фиг. 5. Расчетная схема нагружения и моделирования изгибных форм структурной компоненты (метаструктуры) дополнительного упругого элемента при закритическом деформировании.
Фиг. 6. КЭ-модель напряженно-деформированного состояния конструкции дополнительного упругого элемента.
Фиг. 7. Схема получения исходной изгибной формы многослойной метаструктуры методом, реализующим эффект «памяти» формы, для последующей сборки метаструктур в пакет.
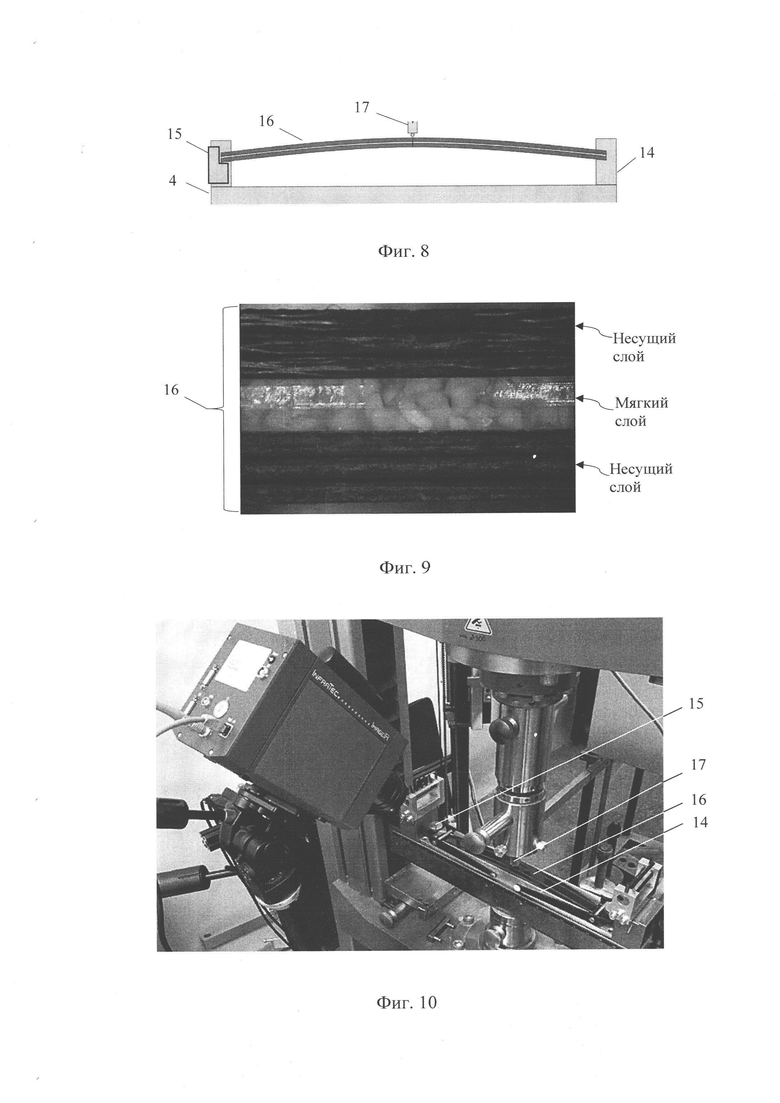
Фиг. 8. Схема дополнительного упругого элемента в сборе с метаструктурой заданной изгибной формы.
Фиг. 9. Фрагмент (продольный вид) тест-модели метаструктуры, включающей два несущих слоя из многослойного углеволокна и мягкий промежуточный слой из высокопрочного силикона с модифицирующим наполнителем, например, в виде полидисперсной порошковой среды (пример выполнения).
Фиг. 10. Модель дополнительного упругого элемента в момент комбинированных статических и циклических механических испытаний, с контролем разогрева рабочей секции элемента.
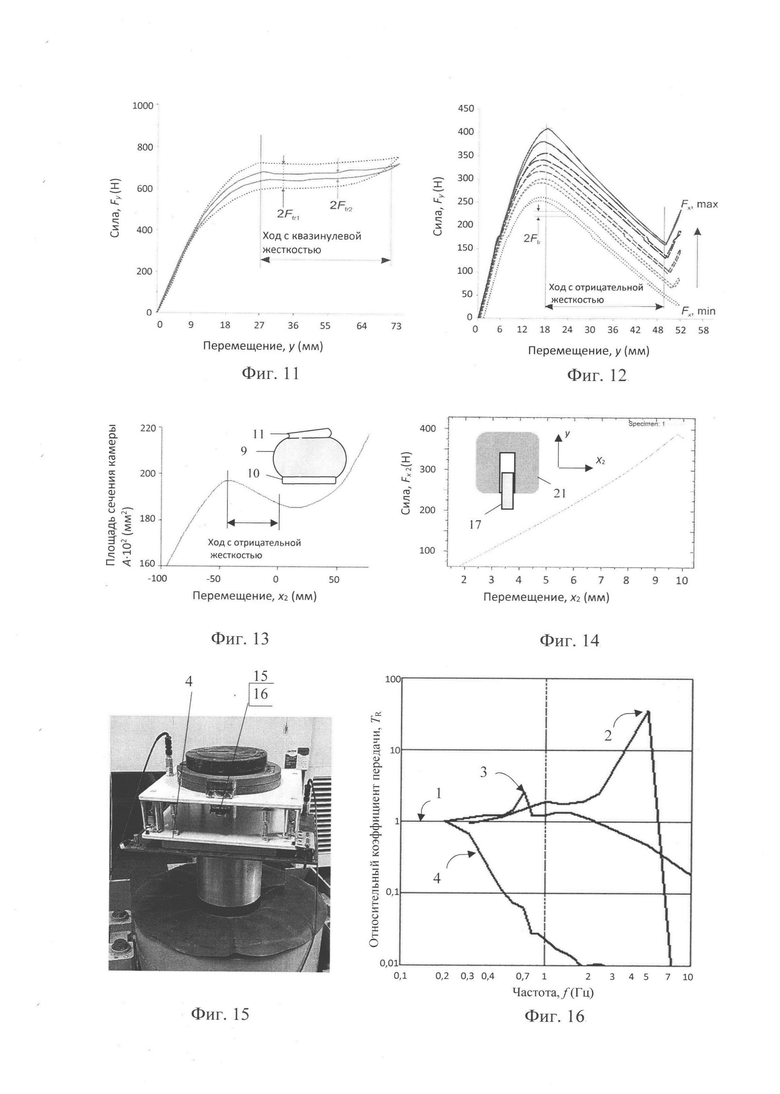
Фиг. 11. Упругая характеристика подвески в направлении рабочего хода.
Фиг. 12. Упругая характеристика дополнительного упругого элемента в деформированном состоянии с отрицательной жесткостью.
Фиг. 13. Упругая характеристика упругого элемента в деформированном состоянии с отрицательной жесткостью.
Фиг. 14. Упругая характеристика сменного эластичного ограничителя хода упругого элемента в направлении, ортогональном рабочему ходу.
Фиг. 15. Весогабаритный макет подвески в момент стендовых (имитационных) виброиспытаний модели системы виброизоляции пилота.
Фиг. 16. Частотная характеристика модели системы виброизоляции пилота, в сравнении с характеристиками аналогов.
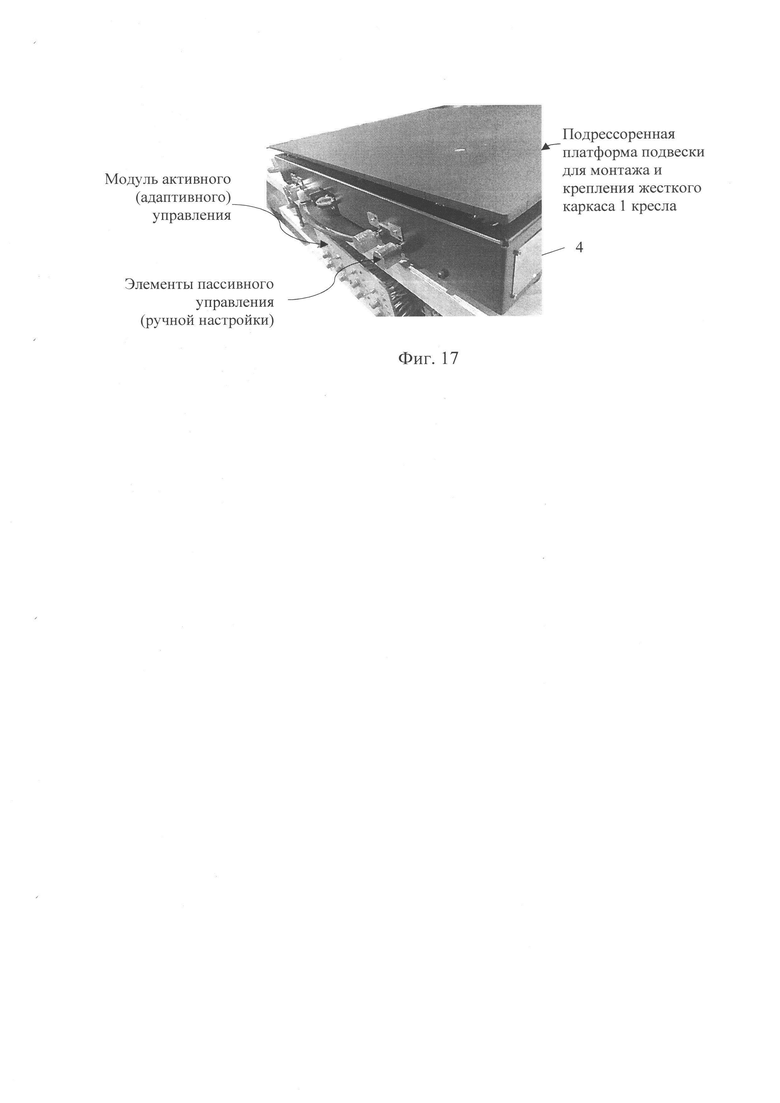
Фиг. 17. Масштабная модель подвески для отработки процессов сборки, настройки и управления (пример выполнения).
Кресло пилота (см. фиг. 1) включает жесткий каркас 1, подушку 2 из эластичного материала, заменяемую на сумку с парашютом в вертолетах специального назначения, эластичный чехол 3 спинки и подвеску, механизмы которой установлены в корпусе 4.
Подвеска кресла (см. фиг. 2 и фиг. 3) включает, помимо упомянутого корпуса 4, выполненного из легкого прочного сплава, направляющий механизм, состоящий из нескольких (например, четырех) пар полозков 5 и 6, жестко закрепленных на корпусе 4 и каркасе 1, соответственно, при этом в полозки 5 и 6 установлены и зафиксированы сменные композитные вставки 7 и 8 на основе легкого сплава, например, Д16. Рабочие поверхности вставок 7 и 8, полученные, например, методом микроплазменного оксидирования до фазы α-Al2O3, обращены к друг другу с возможностью контактного взаимодействия (скольжения) при движении каркаса 1 относительно корпуса 4 в вертикальном направлении. Подвеска включает упругий элемент, выполненный, например, в виде бесштоковой аэропружины 9, имеющей опору 10 с нижним обтекателем (не показан), установленную в корпусе 4, и верхний обтекатель 11, а также разъем 12 для соединения рабочей камеры аэропружины 9 с электропневматическим блоком 13 управления процессами подготовки и подачи воздуха. Подвеска снабжена также дополнительным упругим элементом, включающим опорное основание 14 с регулировочными вставками 15, пакеты из упругих многослойных метаструктур 16, торцы которых установлены на опорном основании 14 с возможностью настройки с помощью вставок 15, а центральные части стянуты шпилькой 17. Для совместной работы упругого и дополнительного упругого элементов, подвеска снабжена соединительным устройством, включающим консоль 18, один конец которой снабжен регулировочной шпилькой 19, соединяющей консоль 18 с верхним обтекателем 11 упругого элемента, а противоположный конец - стаканом 20, в который запрессована сменная эластичная втулка 21, с возможностью вертикального смещения соединительного устройства относительно шпильки 17 при настройке подвески.
Кроме того (см. фиг. 4), подвеска снабжена механизмом для монтажа и перестановки кресла вперед-назад для выбора и фиксации его положения в зависимости от особенностей антропометрии сменных пилотов, при этом данный механизм включает комплект, например, из двух пар полозков 22 и 23, жестко закрепленных к силовому полу кабины и корпусу 4, соответственно, а в полозки 22 и 23 вставлены и зафиксированы сменные композитные вставки 24 и 25 на основе легкого сплава, например, Д16, рабочие поверхности которых, полученные методом микроплазменного оксидирования до фазы α-Al2O3, обращены к друг другу с возможностью контактного взаимодействия при смещении кресла в процессе его перестановки.
Предлагаемый способ виброизоляции осуществляют с помощью подвески следующим образом. Комплектуют, устанавливают в подвеску и настраивают, с помощью регулировочных вставок 15 (см. фиг. 5), дополнительный упругий элемент в виде пакета метаструктур 16 на совместную работу с упругим элементом. Выборка результатов (см. пример на фиг. 6) моделирования и оптимизации напряженно-деформируемого состояния модели конструкции (в натуральном масштабе) дополнительного упругого элемента показывает, что модель обеспечивает условия прочности метаструктур 16 при закритическом деформировании в направлении рабочего хода, причем предельные значения напряжений, по меньшей мере, втрое меньше предела текучести, даже при максимальном ходе. В зависимости от соотношения сил Fx и Fy пространственного нагружения, метаструктуры 16 могут выполнять функции структурной компоненты дополнительного упругого элемента с регулируемой отрицательной или квазинулевой жесткостью. Далее (см. фиг .7) получают заданную (соответствующую расчетной) практическую изгибную форму метаструктур 16, для чего каждую, прямолинейную в исходном состоянии, конструкцию с двумя несущими слоями с «памятью» формы и промежуточным мягким упругим слоем нагревают до температуры активации «памяти» формы, деформируют по схеме жесткого четырехточечного изгиба до заданной стрелы прогиба, охлаждают без снятия нагрузки до температуры ниже температуры активации для фиксации новой формы и разгружают. Затем собирают метаструктуры 16 в пакет и стягивают шпилькой 17, в количестве, необходимом для обеспечения возможности регулирования статической (полезной) нагрузки в направлении рабочего хода, устанавливают на опорном основании 14 и дополнительно настраивают (см. фиг. 8) отдельные метаструктуры 16 с помощью регулировочных вставок 15 для достижения их синхронного упругого деформирования в пакете.
Результаты исследований показали, что упругие свойства многослойных метаструктур 16 могут варьироваться в широком диапазоне, например, путем: (а) регулирования жесткости несущих (углеволоконных) слоев, (б) введения мягких полимерных слоев, моделирующих эффект "плавающего" связующего, (в) изменения модуля упругости и толщина мягких полимерных слоев. Уменьшение толщины несущих слоев и введение мягкого слоя (см. пример выполнения на фиг. 9) снижает несущую способность метаструктуры 16, в сравнении с жесткой углепластиковой балкой соизмеримой суммарной толщины, но позволяет существенно (в два раза и более) увеличить рабочий ход с отрицательной или квазинулевой жесткостью без увеличения габаритов подвески. Варьирование структурно-функциональных схем (см. пример на фиг. 2) расположения метаструктур 16 позволяет их удлинить, что дает возможность дополнительно увеличить ход. В свою очередь, комплектование пакетов метаструктур 16 внутри корпуса 4 на площади ~450×450 мм, как, например, под креслом пилота Ми-8 и других моделей вертолетов КБ им. Миля, позволяет регулировать статическую нагрузку на подвеску в заданном диапазоне в соответствие с массой сменных пилотов от 55 до 120 кг.
Далее осуществляют статические и циклические испытания упругого элемента и дополнительного упругого элемента. Например, фиг. 10 иллюстрирует процесс испытаний дополнительного упругого элемента на автоматизированном комплексе на основе универсальной испытательной машины, с термографическим анализом критических зон деформированных метаструктур 16 с помощью инфракрасной камеры. В процессе статических испытаний, дополнительный упругий элемент, с помощью регулировочных вставок 15, настраивают на работу в режиме квазинулевой жесткости (см. фиг. 11), при статических нагрузках на подвеску Fy≤650÷700 Н, что соответствует массе сменного пилота до 75^-80 кг.В процессе циклических испытаний минимизируют суммарные силы Ffr трения скольжения в подвижных соединениях направляющего механизма на участке квазинулевой жесткости. Например, фиг. 11 показывает, что силы трения снижены с величины Ffr1, как в рычажном направляющем механизме, применяемом в подвеске-аналоге, до Ffr2 в направляющем механизме, пример выполнения которого показан на фиг. 4. Небольшое количество циклов общей продолжительностью до 500 часов нагружения силами прижатия Fp≤85÷100 Н и «притирки» пар композитных вставок 24 и 25 в их относительном движении с частотой ƒ=1÷2 Гц позволило снизить демпфирование до величин D≤0,02. Для сравнения, использование направляющих механизмов, как в подвеске-аналоге, позволяет снизить данный параметр до D≤0,08÷0,09. Расчеты показали, что, для качественной виброизоляции на инфрачастотах, включая почти нулевые значения ƒ<1 Гц, необходимо преодолеть порог демпфирования порядка D≈ 0,04. Следовательно, направляющий механизм (см. пример выполнения на фиг.4) позволяет решить техническую задачу. Далее, по результатам циклических испытаний оптимизируют протяженность рабочего хода подвески на участке упругой характеристики с квазинулевой жесткостью. В приведенном на фиг. 11 примере, рабочий ход может достигать Y≈45÷7 мм. Для пилотов большей массы (80 кг и более), дополнительный упругий элемент настраивают на режим отрицательной жесткости (см. фиг. 12), для последующей работы в параллель с упругим элементом, т.е. с аэропружиной 9 (см. также фиг. 3) заданной площади А сечения рабочей камеры объемом V, с регулируемой положительной жесткостью при движении в y-направлении.
Согласно способу возможно реализовать режимы отрицательной и квазинулевой жесткости и, следовательно, повысить качество инфрачастотной виброизоляции также в горизонтальном х2-направлении, ортогональном рабочему ходу подвески. Для этого используют упругий элемент, например, в виде бесштоковой аэропружины 9 с обтекателями 10 и 11 определенной формы. Фиг. 13 показывает, что такая аэропружина с объемом V~0,5 л рабочей камеры позволяет получить участок отрицательной жесткости с амплитудой до ±10÷12 мм и более при деформировании камеры и, соответственно, боковом относительном сдвиге обтекателей. Для получения квазинулевой жесткости в x2-направлении, используют сменную эластичную втулку 21 (см. фиг. 14) для работы в параллель с аэропружиной 9 (см. также фиг. 3). Величины силы упругого сжатия и, следовательно, положительной жесткости втулки 21 определяют в соответствии с величиной отрицательной жесткости аэропружины 9. Жесткость втулки 21 определяют путем расчетов и статических стендовых испытаний. Для предельно допустимых углов крена вертолета (<30°) сила сжатия такой втулки не превысит Fx2≤200÷250 Н.
Для анализа и оптимизации показателей эффективности предлагаемого способа виброизоляции в диапазоне инфрачастот, включая почти нулевые значения, выполнено стендовое моделирование и исследование вибрационных характеристик тест-моделей систем виброизоляции с использованием данных летных испытаний, полученных в заданных точках силового пола кабин и на подушках пилотов вертолетов Ми-8 различных модификаций. На фиг. 15 представлена одна из тест-моделей системы виброизоляции под статической нагрузкой, соответствующей массе человека до 7(Н75 кг, установленная на электродинамическом вибраторе с толкающим усилием до 1000 Н. Для моделирования вибраций в исследуемом диапазоне частот, использован калиброванный внешний генератор частоты с рабочим диапазоном ƒ≥0,1 Гц, т.к. встроенный генератор имел устойчивый диапазон частот возбуждения ƒ≥3 Гц. График 1 (см. фиг. 16) - характеристика входной вибрации в диапазоне инфрачастот ƒ≤10 Гц, для тест-моделей эквивалентной статической нагрузки. Графики 2 и 3 - частотные характеристики (функции передачи по виброускорению) тест-модели подвески-аналога с дополнительным упругим элементом знакопеременной жесткости, при отключенном и включенном режиме отрицательной жесткости, соответственно. График 4 - характеристика тест-модели заявляемого объекта. Сравнивая результаты испытаний, можно сказать, что подвеска-аналог при отключенном дополнительном упругом элементе, эффективна, начиная с 6 Гц, при включенном - с 2 Гц, что и было подтверждено результатами летных испытаний подвески-аналога. При этом, на инфрачастотах ƒ≈1÷2 Гц имеет место усиление входной вибрации, которое более заметно на частотах ƒ<1 Гц. Применение рычажного направляющего механизма в конструкции подвески-аналога позволило увеличить участок рабочего хода с квазинулевой жесткостью до величин, необходимых для безопасной работы пилотов (Y≥25 мм). Однако такое техническое решение стало одной из основных причин недостаточно качественной виброизоляции на инфрачастотах ƒ≈1÷2 Гц и ее полном отсутствии на частотах ƒ<1 Гц, вследствие невозможности преодолеть порог демпфирования (см. выше приведенные значения коэффициента D демпфирования). Для сравнения, предлагаемый способ виброизоляции, реализуемый с помощью подвески кресла пилота, обеспечивает многократное (10÷100 раз и более) повышение качества виброизоляции во всем диапазоне инфрачастот ƒ≤10 Гц, включая почти нулевые значения ƒ<1 Гц, а также повышение компактности и снижение веса подвески и кресла пилота вертолета в целом.
Промышленная применимость заявляемых способа виброизоляции и подвески кресла подтверждается приведенными примерами конкретного выполнения тест-моделей и экспериментальных образцов (см. фиг. 4, 9, 10, 15), а также результатами их прочностных, статических, циклических и вибрационных испытаний (см. фиг. 6, 11-14, 16). Ведется проектирование опытной партии подвесок (см. пример на фиг. 17) с пассивным или активным, в зависимости от объекта виброизоляции (пилота, пассажира или прибора), параметрическим управлением для планируемых испытаний в современных и перспективных вертолетах различного назначения.
Таким образом:
1. Предлагаемое техническое решение, благодаря разработке многослойных упругих, прочных метаструктур на основе легких, прочных полимерных композитов, с возможностью реализации эффекта «памяти» формы, позволяет существенно повысить уровень механизации процессов изготовления, сборки и монтажа дополнительного упругого элемента, а его настройку и подвески кресла в целом осуществлять более точно, с меньшими затратами времени.
2. Предлагаемое техническое решение, благодаря введению в систему виброизоляции пилота вертолета дополнительного упругого элемента в виде, указанном в п. 2, позволяет получать, без дополнительных механизмов, и регулировать отрицательную или квазинулевую жесткость в заданном диапазоне на протяжении рабочего хода Y≥25 мм подвески, необходимого и достаточного для безопасной и эффективной работы пилотов.
3. Предлагаемое техническое решение, благодаря разработке и введению в подвеску направляющего механизма с короткой кинематической цепью, где рабочие поверхности подвижных соединений структурных элементов выполнены из антифрикционных композитов, позволяет преодолеть порог демпфирования и снизить его до D≈0,04 и, в свою очередь, расширить диапазон эффективной виброизоляции на инфрачастотах ƒ≥1÷10 Гц, включая почти нулевые значения, ƒ<1 Гц.
В целом, предлагаемое техническое решение позволяет значительно расширить частотный диапазон и повысить качество пространственной виброизоляции, включая почти нулевые частоты, а также существенно повысить компактность, снизить габариты и вес подвески кресла и всей системы виброизоляции пилота вертолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИБРОИЗОЛЯЦИИ ПИЛОТА ВЕРТОЛЕТА И ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2015 |
|
RU2597042C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ И ВИБРОИЗОЛИРУЮЩИЙ МЕХАНИЗМ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2019 |
|
RU2753061C2 |
| СПОСОБ ВТОРИЧНОГО ПОДРЕССОРИВАНИЯ ТЕЛЕЖКИ ВАГОНА ВЫСОКОСКОРОСТНОГО РЕЛЬСОВОГО ТРАНСПОРТА | 2015 |
|
RU2597428C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И КОМПАКТНАЯ ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2010 |
|
RU2438888C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОИЗОЛИРУЮЩЕГО УСТРОЙСТВА КОМПАКТНОГО СИДЕНЬЯ ДЛЯ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И ВИБРОИЗОЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2001 |
|
RU2214335C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ПОДВЕСКИ КОМПАКТНОГО СИДЕНЬЯ | 2001 |
|
RU2216461C2 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И СИДЕНЬЕ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2115570C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2440523C2 |
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| Устройство для гашения колебаний | 2017 |
|
RU2668933C1 |
Группа изобретений относится к устройству для виброизоляции членов экипажа вертолетов. Способ реализуют с помощью подвески, которую снабжают упругим элементом, дополнительным упругим элементом знакопеременной жесткости, выполненным из композитных метаструктур с «памятью» формы, и направляющим механизмом для работы в параллель обоих упругих элементов, и обеспечения механической добротности системы виброизоляции при движении на инфрачастотах, включая почти нулевые частоты. Упругий элемент подвески выполнен в виде бесштоковой аэропружины с обтекателями, форма которых выполнена так, чтобы обеспечить данному элементу знакопеременную жесткость в плоскости, ортогональной направлению хода, а дополнительный упругий элемент - в виде пространственно нагруженных метаструктур с «памятью» формы на основе полимерных композитов с варьируемыми геометрическими и механическими характеристиками, собранных в пакеты в количестве и по структурно-функциональным схемам согласно общей компоновки и несущей способности системы. Достигается расширение частотного диапазона и повышение качества пространственной виброизоляции, включая почти нулевые частоты. 2 н. и 2 з.п. ф-лы, 17 ил.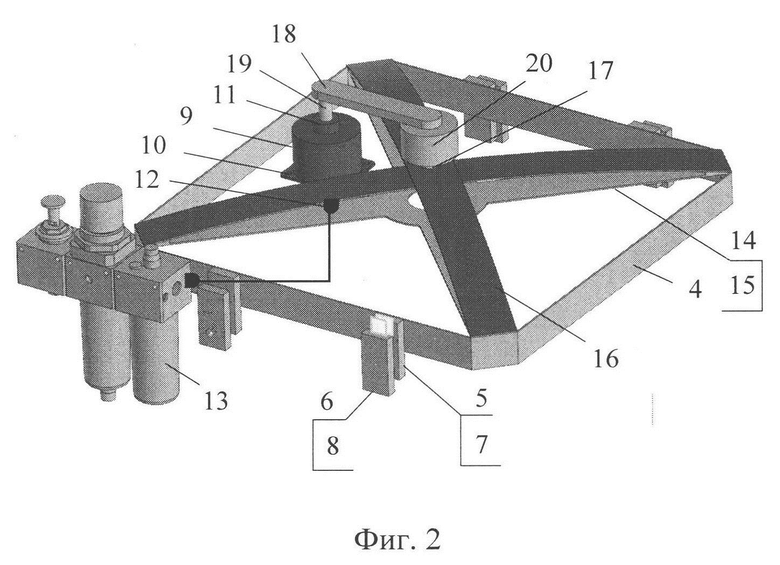
1. Способ виброизоляции пилота вертолета, согласно которому в систему виброизоляции кресла пилота вводят подвеску, снабженную упругим элементом, дополнительным упругим элементом знакопеременной жесткости и направляющим механизмом, структурные элементы которого образуют кинематическую цепь для минимизации суммарной жесткости обоих упругих элементов и обеспечения движения системы в направлении минимальной жесткости, отличающийся тем, что дополнительный упругий элемент выполняют в виде пространственно нагруженных композитных метаструктур с «памятью» формы, которые собирают в пакеты и присоединяют к подвеске в количестве и по структурно-функциональным схемам согласно общей компоновке, требованиям к рабочему ходу и полезной нагрузке подвески, а также прочности дополнительного упругого элемента при вибрационном движении, при этом направляющий механизм выполняют с кинематической цепью структурных элементов, подвижные соединения которых обеспечивают механическую добротность системы для преодоления порога демпфирования при движении на инфрачастотах, далее осуществляют параметрическое и позиционное управление подвеской для обеспечения несущей способности и устойчивого движения системы на инфрачастотах, включая движение вблизи почти нулевых частот.
2. Способ по п. 1, отличающийся тем, что дополнительный упругий элемент выполняют в виде многослойных метаструктур на основе полимерных композитов с варьируемыми геометрическими и механическими характеристиками, состоящих из несущих углеволоконных слоев и промежуточных, для создания эффекта "плавающего" связующего, мягких слоев на основе высокомолекулярных полимеров с наполнителями из полидисперсной фазы.
3. Подвеска кресла для реализации способа по п. 1 или 2, содержащая упругий элемент и дополнительный упругий элемент знакопеременной жесткости, а также направляющий механизм, структурные элементы которого образуют кинематическую цепь для обеспечения движения подвески в направлении минимальной суммарной жесткости обоих упругих элементов, отличающаяся тем, что дополнительный упругий элемент выполнен в виде пространственно нагруженных композитных метаструктур с «памятью» формы, собранных в пакеты в количестве и по структурно-функциональным схемам, определяемым требованиями к рабочему ходу и полезной нагрузке подвески, а также прочности дополнительного упругого элемента при вибрационном движении, а направляющий механизм выполнен с кинематической цепью структурных элементов, подвижные соединения которых снабжены сменными вставками из антифрикционного композита для преодоления порога демпфирования при движении на инфрачастотах, включая движение вблизи почти нулевых частот.
4. Подвеска кресла для реализации способа по п. 3, отличающаяся тем, что упругий элемент выполнен в виде бесштоковой аэропружины с обтекателями, форма которых выполнена так, чтобы обеспечить данному элементу знакопеременную жесткость в плоскости, ортогональной направлению рабочего хода подвески.
| СПОСОБ ВИБРОИЗОЛЯЦИИ ПИЛОТА ВЕРТОЛЕТА И ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2015 |
|
RU2597042C1 |
| US 2012318920 А1, 20.12.2012 | |||
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2316730C1 |
| US 2014152066 A1, 05.06.2014 | |||
| CN 206870897 U, 12.01.2018. | |||

